KLIP: localized distribution shift detection via KL-divergence with diffusion priors in Inverse Problems
Pith reviewed 2026-06-28 23:03 UTC · model grok-4.3
The pith
A KL-divergence metric between diffusion prior and posterior detects and localizes distribution shifts in inverse problems without calibration data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
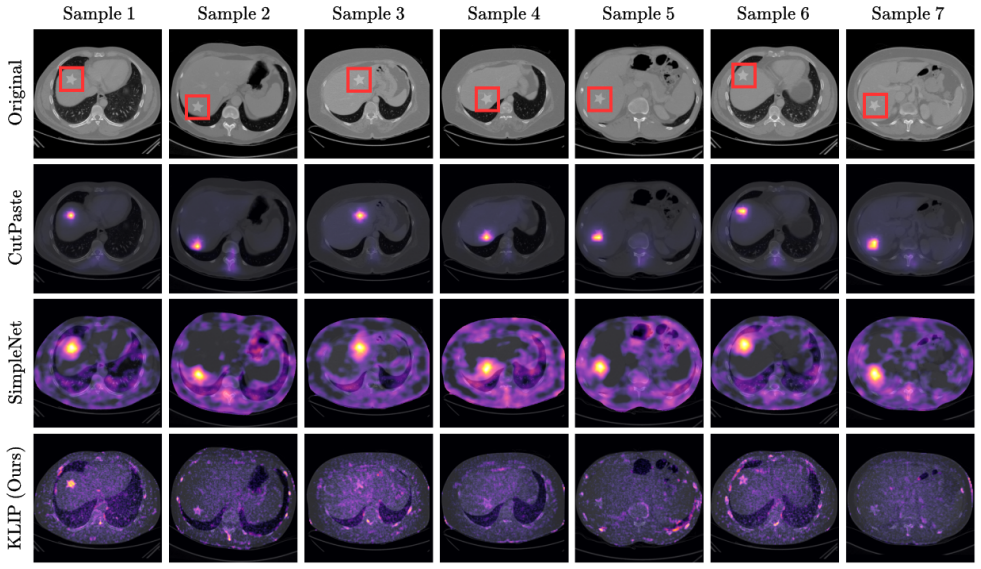
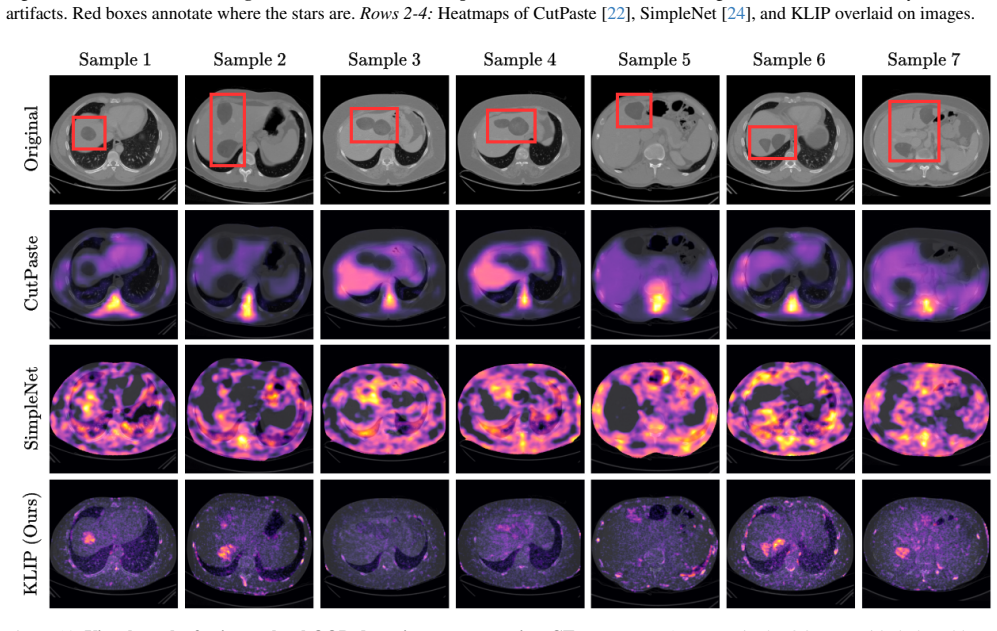
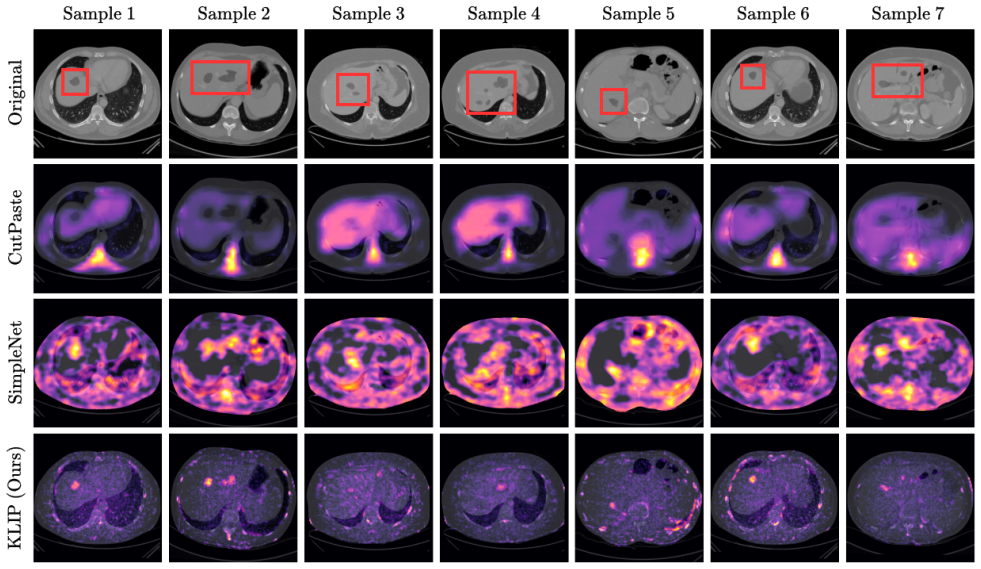
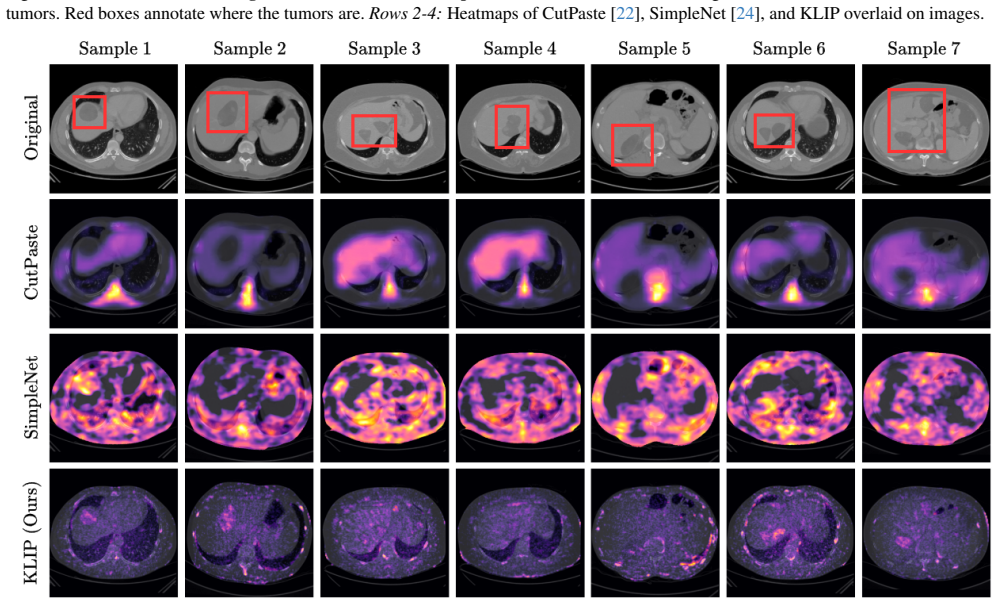
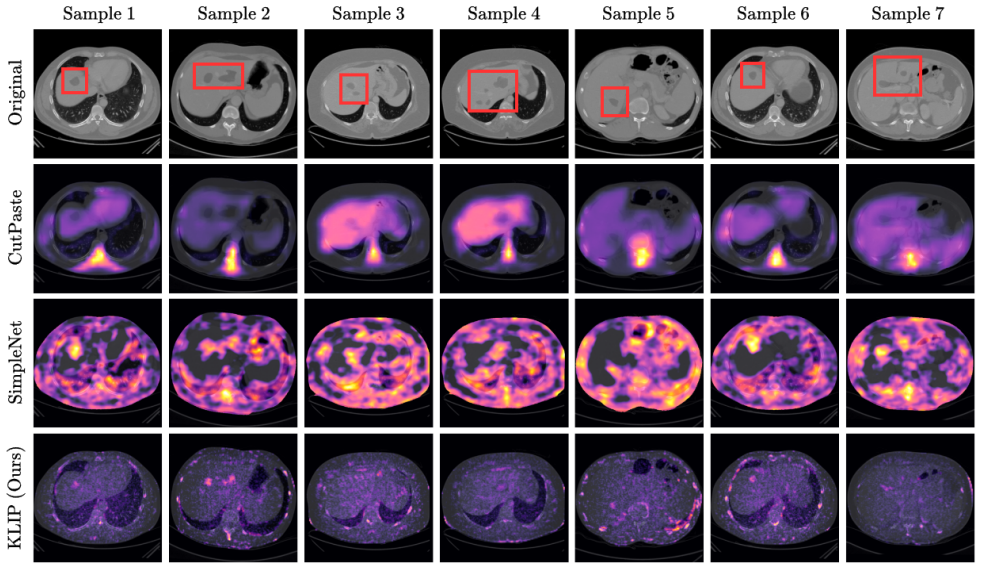
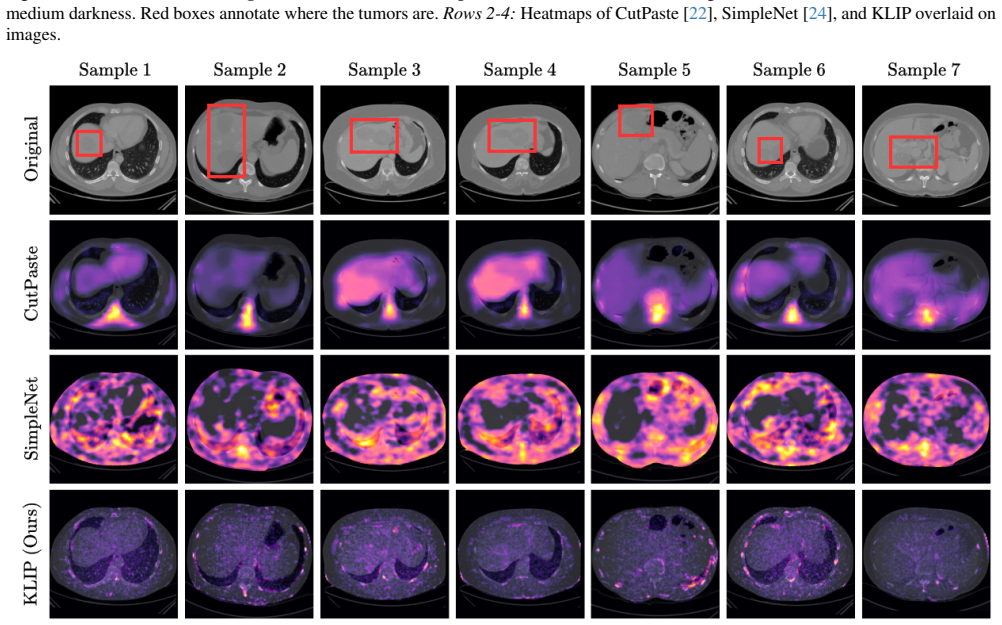
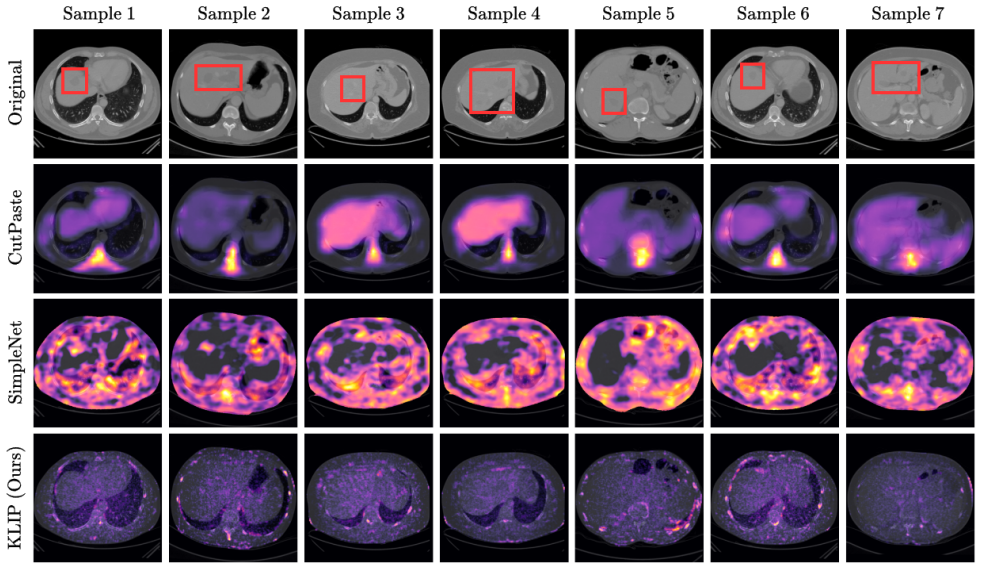
The authors introduce a metric that quantifies distribution shift by computing the KL divergence between the diffusion prior and the posterior distribution obtained while solving an inverse problem. This metric operates without requiring calibration data or knowledge of the shifted distribution. It supports detection at both the whole-image level and the localized patch level. Experiments demonstrate its ability to identify subtle shifts, such as the presence of tumors in liver CT scans, and its applicability across different diffusion models, datasets, and inverse problem types.
What carries the argument
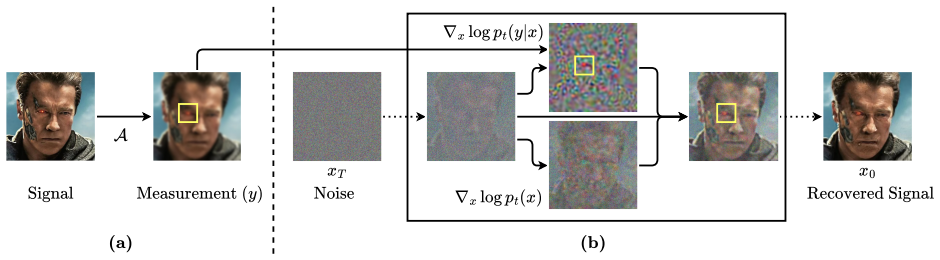
The KLIP metric, defined as the Kullback-Leibler divergence between the diffusion prior and the posterior distribution.
If this is right
- The metric enables OOD detection in inverse problems without any examples from the shifted distribution.
- It supports localization of anomalous regions inside an image rather than only whole-image decisions.
- It identifies subtle semantic shifts such as healthy versus tumor-containing medical scans.
- The same construction applies across multiple diffusion models, datasets, and inverse-problem formulations.
Where Pith is reading between the lines
- The localization output could be used inside iterative reconstruction loops to down-weight or mask suspect regions automatically.
- Similar divergence checks might be tested with other generative priors once those priors are shown to be sufficiently accurate.
- The method suggests a route to unsupervised quality control for any measurement-based imaging pipeline where a strong generative model is already available.
Load-bearing premise
The diffusion model must accurately represent the true underlying data distribution so that the KL divergence reliably signals distribution shift rather than mismatch between the model and reality.
What would settle it
If the metric fails to flag images containing tumors when the diffusion model was trained only on healthy scans, or if it consistently flags normal images as out-of-distribution, the central claim would be falsified.
Figures
read the original abstract
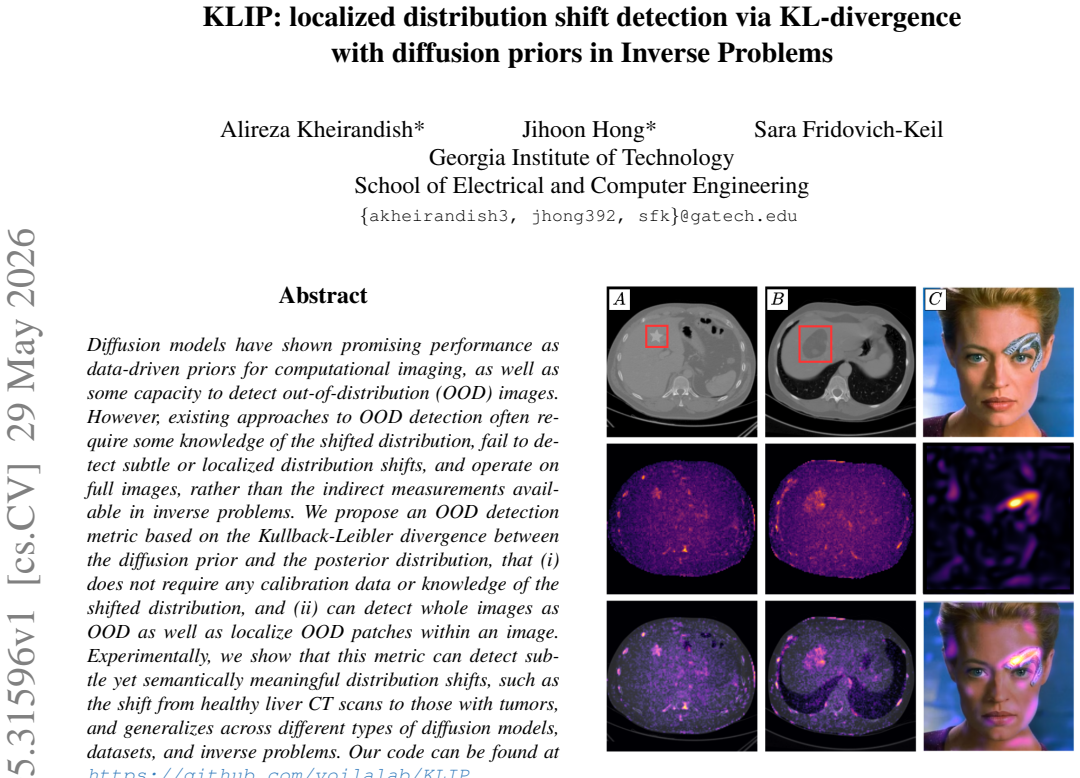
Diffusion models have shown promising performance as data-driven priors for computational imaging, as well as some capacity to detect out-of-distribution (OOD) images. However, existing approaches to OOD detection often require some knowledge of the shifted distribution, fail to detect subtle or localized distribution shifts, and operate on full images, rather than the indirect measurements available in inverse problems. We propose an OOD detection metric based on the Kullback-Leibler divergence between the diffusion prior and the posterior distribution, that (i) does not require any calibration data or knowledge of the shifted distribution, and (ii) can detect whole images as OOD as well as localize OOD patches within an image. Experimentally, we show that this metric can detect subtle yet semantically meaningful distribution shifts, such as the shift from healthy liver CT scans to those with tumors, and generalizes across different types of diffusion models, datasets, and inverse problems. Our code can be found at https://github.com/voilalab/KLIP.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
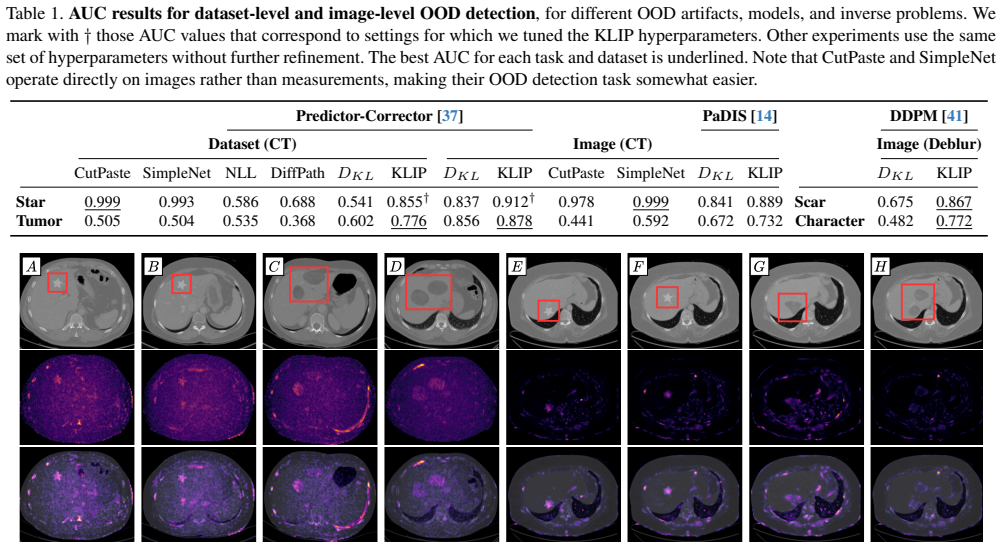
Summary. The paper introduces KLIP, a method for detecting out-of-distribution (OOD) samples in inverse problems using the Kullback-Leibler divergence between a diffusion prior and the corresponding posterior distribution. It claims this approach requires no calibration data or knowledge of the shifted distribution, enables both global detection and localization of OOD patches, and generalizes across diffusion models, datasets, and inverse problems, as demonstrated on tasks like detecting tumors in liver CT scans.
Significance. If the central claim holds, this work would offer a calibration-free OOD detection tool tailored to diffusion-based inverse problem solvers, with the ability to localize shifts within images. This is particularly relevant for medical imaging applications where subtle shifts like pathological changes need to be detected. The public release of code is a positive aspect that supports reproducibility.
major comments (2)
- [Experiments] Experiments section: The paper does not include controlled ablation studies in which the diffusion prior is deliberately misspecified (e.g., trained on mismatched modality or lower-capacity model) while holding the inverse problem and distribution shift fixed; such tests are required to establish that the KL metric isolates shift rather than prior error, since the posterior is obtained via the same prior.
- [Method] Method section (KL metric definition): No error analysis, sensitivity bounds, or verification is provided showing that KL(prior || posterior) primarily reflects distribution shift instead of reconstruction artifacts induced by the measurement operator or the conditional sampling procedure itself.
minor comments (1)
- [Abstract] Abstract states experimental results but provides limited quantitative details; ensure all performance claims in the abstract are directly supported by specific numbers, tables, or figures in the main text.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and constructive feedback on our work. We address each major comment below and outline the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The paper does not include controlled ablation studies in which the diffusion prior is deliberately misspecified (e.g., trained on mismatched modality or lower-capacity model) while holding the inverse problem and distribution shift fixed; such tests are required to establish that the KL metric isolates shift rather than prior error, since the posterior is obtained via the same prior.
Authors: We agree that controlled ablation studies with misspecified priors would provide stronger evidence that the KL divergence metric isolates the effect of distribution shift rather than errors in the prior itself. Our current experiments show that the approach generalizes across different diffusion models, which offers some support for robustness to prior variations. However, we will add the suggested controlled ablations in the revised manuscript, including cases with mismatched modalities and lower-capacity models, to directly address this concern. revision: yes
-
Referee: [Method] Method section (KL metric definition): No error analysis, sensitivity bounds, or verification is provided showing that KL(prior || posterior) primarily reflects distribution shift instead of reconstruction artifacts induced by the measurement operator or the conditional sampling procedure itself.
Authors: This is a valid point. The manuscript relies on empirical demonstrations across multiple inverse problems and distribution shifts to show the metric's effectiveness. To strengthen the theoretical grounding, we will include additional analysis and verification experiments that isolate the contribution of distribution shift from potential artifacts due to the measurement operator or sampling procedure in the revised version. revision: yes
Circularity Check
No circularity: metric defined directly from prior/posterior
full rationale
The paper defines the KLIP OOD metric explicitly as the Kullback-Leibler divergence between the diffusion prior p_θ(x) and the posterior p_θ(x|y) obtained via conditional sampling in the inverse-problem setting. This construction is direct and does not reduce to a fitted parameter, self-referential definition, or load-bearing self-citation. No equations or claims in the abstract invoke uniqueness theorems, ansatzes smuggled via prior work, or renaming of known results; the central claim remains independent of its own inputs. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Diffusion models serve as effective data-driven priors for the distribution in inverse problems.
Reference graph
Works this paper leans on
-
[1]
Deep bayesian inversion computational uncer- tainty quantification for large scale inverse problems
Jonas Adler. Deep bayesian inversion computational uncer- tainty quantification for large scale inverse problems. 2018. 2
2018
-
[2]
Deep posterior sampling: Uncertainty quantification for large scale inverse problems
Jonas Adler and Ozan ¨Oktem. Deep posterior sampling: Uncertainty quantification for large scale inverse problems
-
[3]
Image-to-image regres- sion with distribution-free uncertainty quantification and ap- plications in imaging, 2022
Anastasios N Angelopoulos, Amit P Kohli, Stephen Bates, Michael I Jordan, Jitendra Malik, Thayer Alshaabi, Srigokul Upadhyayula, and Yaniv Romano. Image-to-image regres- sion with distribution-free uncertainty quantification and ap- plications in imaging, 2022. 1, 2
2022
-
[4]
Conformal triage for medical imag- ing ai deployment.medRxiv, pages 2024–02, 2024
Anastasios Nikolas Angelopoulos, Stuart R Pomerantz, Synho Do, Stephen Bates, Christopher P Bridge, Daniel C Elton, Michael H Lev, R Gilberto Gonzalez, Michael I Jor- dan, and Jitendra Malik. Conformal triage for medical imag- ing ai deployment.medRxiv, pages 2024–02, 2024. 1, 2
2024
-
[5]
Bmad: Benchmarks for medical anomaly detection, 2024
Jinan Bao, Hanshi Sun, Hanqiu Deng, Yinsheng He, Zhaox- iang Zhang, and Xingyu Li. Bmad: Benchmarks for medical anomaly detection, 2024. 2
2024
-
[6]
Novelty detection and neural net- work validation
Christopher M Bishop. Novelty detection and neural net- work validation. InInternational Conference on Artificial Neural Networks, pages 789–794. Springer, 1993. 2
1993
-
[7]
Tutorial on diffusion models for imaging and vision.Foundations and Trends® in Computer Graphics and Vision, 16(4):322–471, 2024
Stanley Chan et al. Tutorial on diffusion models for imaging and vision.Foundations and Trends® in Computer Graphics and Vision, 16(4):322–471, 2024. 3
2024
-
[8]
Exploring low-dimensional subspace in diffu- sion models for controllable image editing.Advances in neu- ral information processing systems, 37:27340–27371, 2024
Siyi Chen, Huijie Zhang, Minzhe Guo, Yifu Lu, Peng Wang, and Qing Qu. Exploring low-dimensional subspace in diffu- sion models for controllable image editing.Advances in neu- ral information processing systems, 37:27340–27371, 2024. 2, 5
2024
-
[9]
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T Mccann, Marc L Klasky, and Jong Chul Ye. Diffusion posterior sam- pling for general noisy inverse problems.arXiv preprint arXiv:2209.14687, 2022. 3, 1
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[10]
Out-of-distribution detec- tion with a single unconditional diffusion model.Advances in Neural Information Processing Systems, 37:43952–43974,
Alvin Heng, Harold Soh, et al. Out-of-distribution detec- tion with a single unconditional diffusion model.Advances in Neural Information Processing Systems, 37:43952–43974,
-
[11]
Fast and efficient image novelty detection based on mean-shifts.Sensors, 22(19):7674, 2022
Matthias Hermann, Georg Umlauf, Bastian Goldluecke, and Matthias O Franz. Fast and efficient image novelty detection based on mean-shifts.Sensors, 22(19):7674, 2022. 2
2022
-
[12]
Denoising dif- fusion probabilistic models.Advances in neural information processing systems, 33:6840–6851, 2020
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising dif- fusion probabilistic models.Advances in neural information processing systems, 33:6840–6851, 2020. 5
2020
-
[13]
Conffusion: Confidence intervals for diffusion models, 2022
Eliahu Horwitz and Yedid Hoshen. Conffusion: Confidence intervals for diffusion models, 2022. 2
2022
-
[14]
Learning image priors through patch-based diffusion models for solving inverse problems.Advances in Neural Information Processing Systems, 37:1625–1660,
Jason Hu, Bowen Song, Xiaojian Xu, Liyue Shen, and Jef- frey A Fessler. Learning image priors through patch-based diffusion models for solving inverse problems.Advances in Neural Information Processing Systems, 37:1625–1660,
-
[15]
Label-free liver tumor segmentation
Qixin Hu, Yixiong Chen, Junfei Xiao, Shuwen Sun, Jieneng Chen, Alan L Yuille, and Zongwei Zhou. Label-free liver tumor segmentation. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 7422–7432, 2023. 2, 5
2023
-
[16]
Cuqds: Conformal uncertainty quantification under distribution shift for trajec- tory prediction
Huiqun Huang, Sihong He, and Fei Miao. Cuqds: Conformal uncertainty quantification under distribution shift for trajec- tory prediction. InProceedings of the AAAI Conference on Artificial Intelligence, pages 17422–17430, 2025. 2
2025
- [17]
-
[18]
Alper Selver, O ˘guz Dicle, Mustafa Barıs ¸, and N
Ali Emre Kavur, M. Alper Selver, O ˘guz Dicle, Mustafa Barıs ¸, and N. Sinem Gezer. CHAOS - Combined (CT-MR) Healthy Abdominal Organ Segmentation Challenge Data,
-
[19]
Denoising diffusion restoration models.Advances in neural information processing systems, 35:23593–23606,
Bahjat Kawar, Michael Elad, Stefano Ermon, and Jiaming Song. Denoising diffusion restoration models.Advances in neural information processing systems, 35:23593–23606,
-
[20]
Conformal prediction masks: Vi- sualizing uncertainty in medical imaging
Gilad Kutiel, Regev Cohen, Michael Elad, Daniel Freed- man, and Ehud Rivlin. Conformal prediction masks: Vi- sualizing uncertainty in medical imaging. InInternational Workshop on Trustworthy Machine Learning for Healthcare, pages 163–176. Springer, 2023. 1, 2
2023
-
[21]
Simple and scalable predictive uncertainty estima- tion using deep ensembles.Advances in neural information processing systems, 30, 2017
Balaji Lakshminarayanan, Alexander Pritzel, and Charles Blundell. Simple and scalable predictive uncertainty estima- tion using deep ensembles.Advances in neural information processing systems, 30, 2017. 2
2017
-
[22]
Cutpaste: Self-supervised learning for anomaly de- tection and localization
Chun-Liang Li, Kihyuk Sohn, Jinsung Yoon, and Tomas Pfister. Cutpaste: Self-supervised learning for anomaly de- tection and localization. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 9664–9674, 2021. 6, 1, 3, 5, 7, 8, 9
2021
-
[23]
Deep learning face attributes in the wild
Ziwei Liu, Ping Luo, Xiaogang Wang, and Xiaoou Tang. Deep learning face attributes in the wild. InProceedings of International Conference on Computer Vision (ICCV), 2015. 5, 7
2015
-
[24]
Simplenet: A simple network for image anomaly detection and localization
Zhikang Liu, Yiming Zhou, Yuansheng Xu, and Zilei Wang. Simplenet: A simple network for image anomaly detection and localization. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 20402–20411, 2023. 6, 1, 3, 5, 7, 8, 9
2023
-
[25]
Poem: Out-of- distribution detection with posterior sampling
Yifei Ming, Ying Fan, and Yixuan Li. Poem: Out-of- distribution detection with posterior sampling. InInterna- tional conference on machine learning, pages 15650–15665. PMLR, 2022. 1, 2
2022
-
[26]
Do deep generative models know what they don’t know?International Confer- ence on Learning Representations, 2019
Eric Nalisnick, Akihiro Matsukawa, Yee Whye Teh, Dilan Gorur, and Balaji Lakshminarayanan. Do deep generative models know what they don’t know?International Confer- ence on Learning Representations, 2019. 2
2019
-
[27]
Eric Nalisnick, Akihiro Matsukawa, Yee Whye Teh, and Bal- aji Lakshminarayanan. Detecting out-of-distribution inputs to deep generative models using typicality.arXiv preprint arXiv:1906.02994, 2019. 2
-
[28]
Estimation of entropy and mutual informa- tion.Neural computation, 15(6):1191–1253, 2003
Liam Paninski. Estimation of entropy and mutual informa- tion.Neural computation, 15(6):1191–1253, 2003. 5 9
2003
-
[29]
Cuqipy: I
Nicolai Andr ´e Brogaard Riis, Amal Alghamdi, Felipe Uribe, Silja L Christensen, Babak Maboudi Afkham, Per Chris- tian Hansen, and Jakob Sauer Jørgensen. Cuqipy: I. com- putational uncertainty quantification for inverse problems in python.Inverse Problems, 40, 2023. 2
2023
-
[30]
Gener- ative modelling with inverse heat dissipation.International Conference on Learning Representations, 2023
Severi Rissanen, Markus Heinonen, and Arno Solin. Gener- ative modelling with inverse heat dissipation.International Conference on Learning Representations, 2023. 2, 5, 8
2023
-
[31]
Schl ¨uter, Jeremy Tan, Benjamin Hou, and Bern- hard Kainz
Hannah M. Schl ¨uter, Jeremy Tan, Benjamin Hou, and Bern- hard Kainz. Natural synthetic anomalies for self-supervised anomaly detection and localization, 2022. 2
2022
-
[32]
Shirin Shoushtari, Edward P Chandler, Yuanhao Wang, M Salman Asif, and Ulugbek S Kamilov. Unsupervised de- tection of distribution shift in inverse problems using diffu- sion models.arXiv preprint arXiv:2505.11482, 2025. 1, 2
-
[33]
Eigenscore: Ood detection using covari- ance in diffusion models.arXiv preprint arXiv:2510.07206,
Shirin Shoushtari, Yi Wang, Xiao Shi, M Salman Asif, and Ulugbek S Kamilov. Eigenscore: Ood detection using covari- ance in diffusion models.arXiv preprint arXiv:2510.07206,
-
[34]
Information diver- gence estimation based on data-dependent partitions.Jour- nal of Statistical Planning and Inference, 140(11):3180– 3198, 2010
Jorge Silva and Shrikanth S Narayanan. Information diver- gence estimation based on data-dependent partitions.Jour- nal of Statistical Planning and Inference, 140(11):3180– 3198, 2010. 5
2010
-
[35]
Score-Based Generative Modeling through Stochastic Differential Equations
Yang Song, Jascha Sohl-Dickstein, Diederik P Kingma, Ab- hishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equa- tions.arXiv preprint arXiv:2011.13456, 2020. 3, 5, 6, 1
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[36]
Maximum likelihood training of score-based diffusion mod- els.Advances in neural information processing systems, 34: 1415–1428, 2021
Yang Song, Conor Durkan, Iain Murray, and Stefano Ermon. Maximum likelihood training of score-based diffusion mod- els.Advances in neural information processing systems, 34: 1415–1428, 2021. 4
2021
-
[37]
Solving inverse problems in medical imaging with score-based generative models, 2021
Yang Song, Liyue Shen, Lei Xing, and Stefano Ermon. Solv- ing inverse problems in medical imaging with score-based generative models.arXiv preprint arXiv:2111.08005, 2021. 2, 3, 4, 5, 6, 1
-
[38]
Equivariant bootstrap- ping for uncertainty quantification in imaging inverse prob- lems
Julian Tachella and Marcelo Pereyra. Equivariant bootstrap- ping for uncertainty quantification in imaging inverse prob- lems. InInternational Conference on Artificial Intelligence and Statistics, 2023. 2
2023
-
[39]
Webster Stayman, and Jeremias Sulam
Jacopo Teneggi, Matthew Tivnan, J. Webster Stayman, and Jeremias Sulam. How to trust your diffusion model: A con- vex optimization approach to conformal risk control, 2023. 2
2023
-
[40]
Limitations of out-of-distribution detection in 3d medical image segmentation.Journal of Imaging, 9(9):191,
Anton Vasiliuk, Daria Frolova, Mikhail Belyaev, and Boris Shirokikh. Limitations of out-of-distribution detection in 3d medical image segmentation.Journal of Imaging, 9(9):191,
-
[41]
Diffusers: State-of-the-art diffu- sion models.https://github.com/huggingface/ diffusers, 2022
Patrick von Platen, Suraj Patil, Anton Lozhkov, Pedro Cuenca, Nathan Lambert, Kashif Rasul, Mishig Davaadorj, Dhruv Nair, Sayak Paul, William Berman, Yiyi Xu, Steven Liu, and Thomas Wolf. Diffusers: State-of-the-art diffu- sion models.https://github.com/huggingface/ diffusers, 2022. 2, 5, 6, 7
2022
-
[42]
Dmplug: A plug-in method for solving inverse problems with diffusion models.Advances in Neural Information Processing Systems, 37:117881– 117916, 2024
Hengkang Wang, Xu Zhang, Taihui Li, Yuxiang Wan, Tian- cong Chen, and Ju Sun. Dmplug: A plug-in method for solving inverse problems with diffusion models.Advances in Neural Information Processing Systems, 37:117881– 117916, 2024. 3
2024
-
[43]
Diver- gence estimation of continuous distributions based on data- dependent partitions.IEEE Transactions on Information Theory, 51(9):3064–3074, 2005
Qing Wang, Sanjeev R Kulkarni, and Sergio Verd ´u. Diver- gence estimation of continuous distributions based on data- dependent partitions.IEEE Transactions on Information Theory, 51(9):3064–3074, 2005. 5
2005
-
[44]
Jeffrey Wen, Rizwan Ahmad, and Philip Schniter. Task- driven uncertainty quantification in inverse problems via conformal prediction.ArXiv, abs/2405.18527, 2024. 2
-
[45]
Tailin Wu, Willie Neiswanger, Hongtao Zheng, Stefano Er- mon, and Jure Leskovec. Uncertainty quantification for for- ward and inverse problems of pdes via latent global evolu- tion.ArXiv, abs/2402.08383, 2024. 2
-
[46]
Principled probabilistic imaging using diffusion models as plug-and-play priors
Zihui Wu, Yu Sun, Yifan Chen, Bingliang Zhang, Yisong Yue, and Katherine Bouman. Principled probabilistic imaging using diffusion models as plug-and-play priors. Advances in Neural Information Processing Systems, 37: 118389–118427, 2024. 3
2024
-
[47]
Provably robust score-based diffusion posterior sampling for plug-and-play image recon- struction.Advances in Neural Information Processing Sys- tems, 37:36148–36184, 2024
Xingyu Xu and Yuejie Chi. Provably robust score-based diffusion posterior sampling for plug-and-play image recon- struction.Advances in Neural Information Processing Sys- tems, 37:36148–36184, 2024. 3
2024
-
[48]
Diffusion probabilistic model made slim
Xingyi Yang, Daquan Zhou, Jiashi Feng, and Xinchao Wang. Diffusion probabilistic model made slim. InProceedings of the IEEE/CVF Conference on computer vision and pattern recognition, pages 22552–22562, 2023. 5, 8
2023
-
[49]
Mediclip: Adapting clip for few-shot medical image anomaly detection, 2024
Ximiao Zhang, Min Xu, Dehui Qiu, Ruixin Yan, Ning Lang, and Xiuzhuang Zhou. Mediclip: Adapting clip for few-shot medical image anomaly detection, 2024. 2
2024
-
[50]
Barajas-Solano, and Alexandre M
Yifei Zong, David A. Barajas-Solano, and Alexandre M. Tar- takovsky. Randomized physics-informed machine learning for uncertainty quantification in high-dimensional inverse problems.ArXiv, abs/2312.06177, 2023. 2 10 KLIP: localized distribution shift detection via KL-divergence with diffusion priors in Inverse Problems Supplementary Material
-
[51]
Likelihood Score Approximation We evaluate KLIP in the context of two prior works [9, 37] with different posterior sampling algorithms. In [37], an ad- ditional step at each timetreplaces the samplex t withx ′ t, which is the solution of a proximal optimization step to ensure consistency of the sample with the measurementy. Specifically,x ′ t is the solut...
-
[52]
For NLL, we di- rectly use the official implementation on github by the au- thors of [35]
Baseline Computation We compare KLIP against 2 primary baselines, NLL (neg- ative log likelihood) and DiffPath [10]. For NLL, we di- rectly use the official implementation on github by the au- thors of [35]. It computes the exact likelihood instead of the Evidence Lower Bound (ELBO) using the probability flow ODE, which is an ordinary differential equatio...
-
[53]
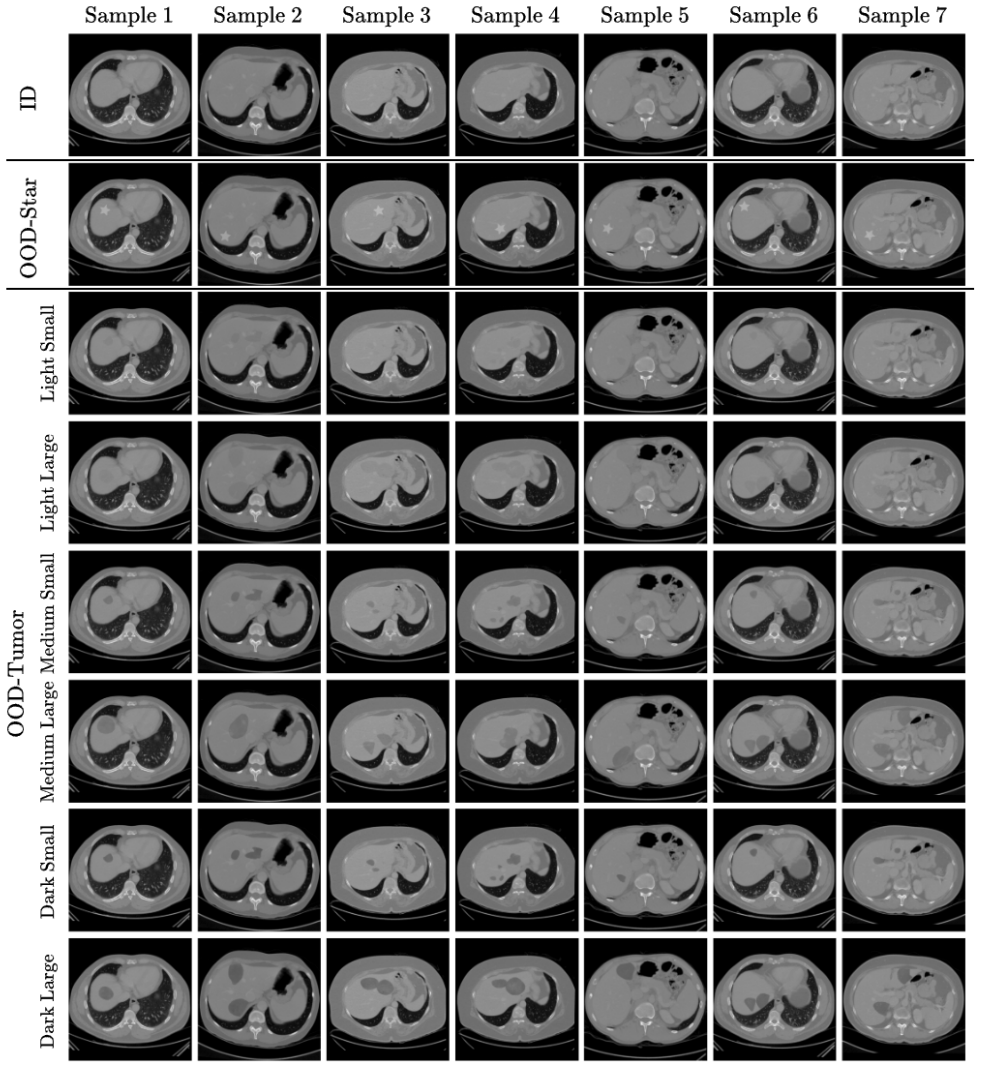
Figure 7 shows sample images from the different OOD sets we used for this evaluation, acquired by modifying the darkness and size of the simulated liver tu- mors
Robustness Evaluation We perform an additional comparison to evaluate the gen- eralizability of KLIP to local OOD features with different properties, specifically simulated liver tumors with differ- ent sizes and densities. Figure 7 shows sample images from the different OOD sets we used for this evaluation, acquired by modifying the darkness and size of ...
-
[54]
Sampling
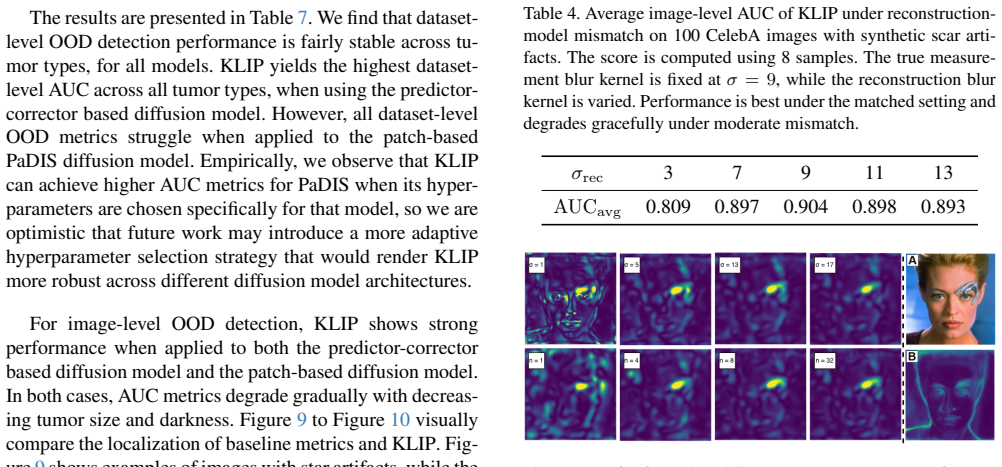
Forward Model Mismatch Following prior work (e.g., [9, 37]), our main experiments assume a matched forward model, meaning that the forward model in the measurement and reconstruction are same. This setting allows us to evaluate KLIP without the addi- tional effect of forward model misspecification. However, exact knowledge of the forward model may be unav...
-
[55]
We report the time to sample 8 reconstructions at 512×512 from a single CT measurementyusing [37], and the total runtime of each method
Computational Evaluation We also compare the computational cost of KLIP against baseline OOD detection methods in Table 5. We report the time to sample 8 reconstructions at 512×512 from a single CT measurementyusing [37], and the total runtime of each method. KLIP takes only∼2% longer than sampling alone. Results indicates that KLIP achieves competitive d...
-
[56]
Sample Size Sensitivity Since KLIP estimates an expectation through Monte Carlo sampling, we evaluate how sensitive its performance is to the number of samples used in approximating the expecta- tion. As shown in Figure 8 and Table 6, KLIP is reasonably stable across different sampling budgets, with performance improving as more samples are used, but with...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.