General Covariant Action Modeling: Constructing Generalized Manifolds via Spatio-Temporal Decoupling
Pith reviewed 2026-06-29 13:30 UTC · model grok-4.3
The pith
General covariance in action policies is realized by decoupling spatial geometry from temporal dynamics and pose via the Generalized Action Manifold.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
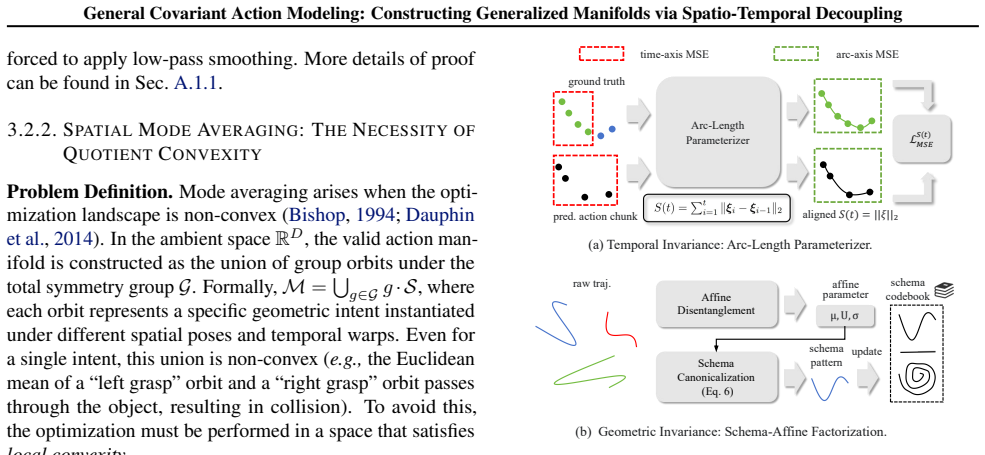
GAM realizes the manifold by enforcing invariance across two orthogonal dimensions: (1) Temporal Invariance, utilizing an Arc-Length Parameterizer to orthogonalize the spatial path geometry from temporal dynamics, ensuring robustness to velocity variations; (2) Geometric Invariance, where a Schema-Affine-Factorization mechanism maps trajectories to canonical world lines in a pose-normalized coordinate frame. This distinguishes invariant geometric schemas from affine modulations, ensuring spatial generalizability.
What carries the argument
The Generalized Action Manifold realized through spatio-temporal decoupling by the Arc-Length Parameterizer for temporal invariance and the Schema-Affine-Factorization for geometric invariance.
Load-bearing premise
Enforcing the temporal and geometric invariances via the Arc-Length Parameterizer and Schema-Affine-Factorization is sufficient to achieve general covariance and the claimed generalization benefits from sparse demonstrations.
What would settle it
An experiment in which policies trained with GAM show no improvement in transfer performance across novel velocities or starting poses compared with geometry-agnostic regression baselines.
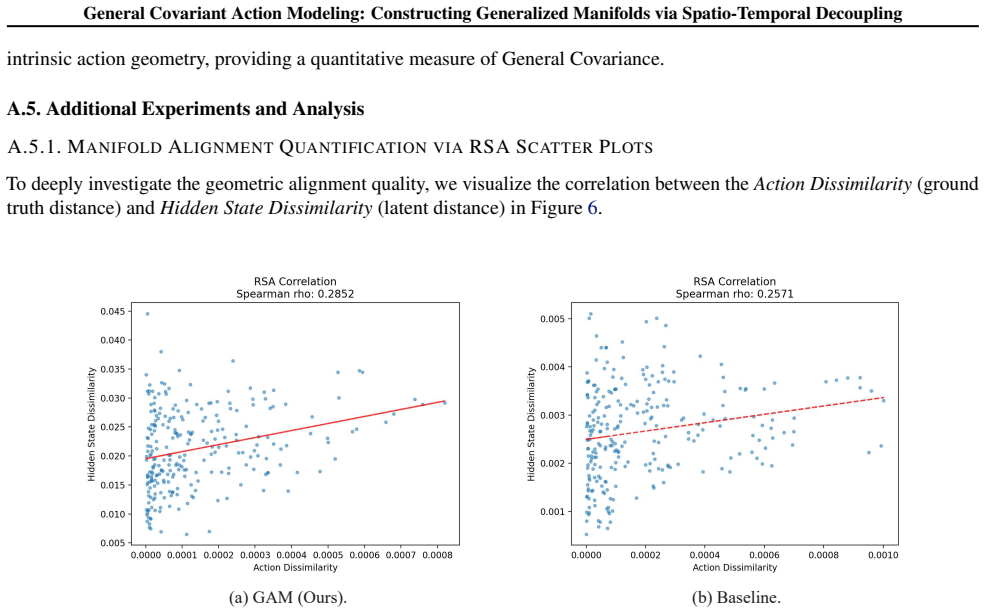
Figures
read the original abstract
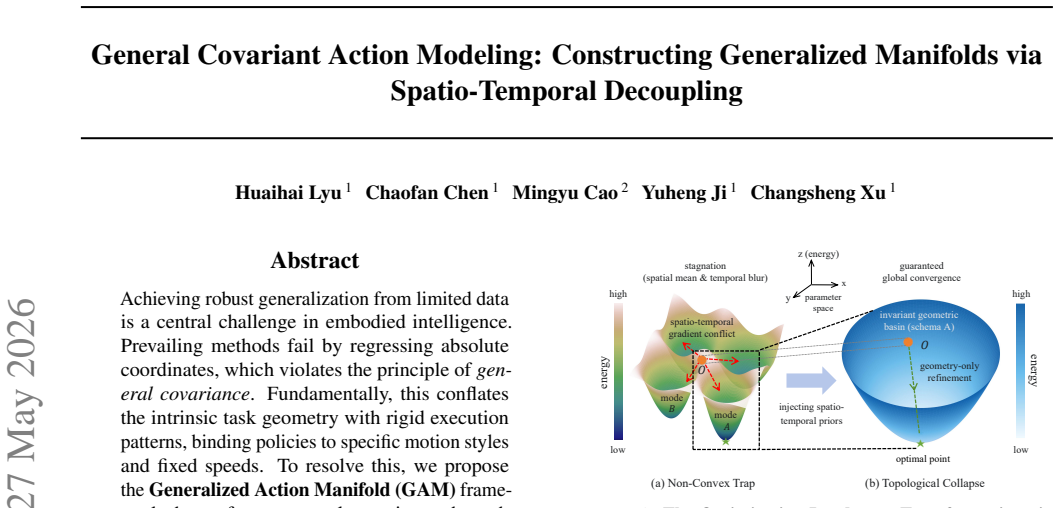
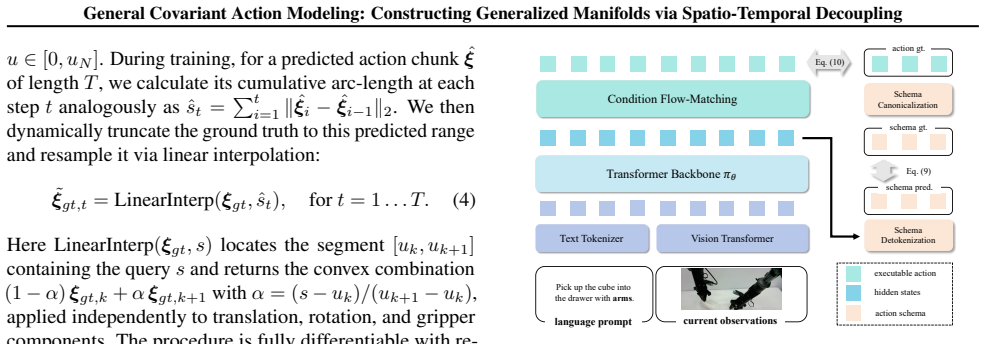
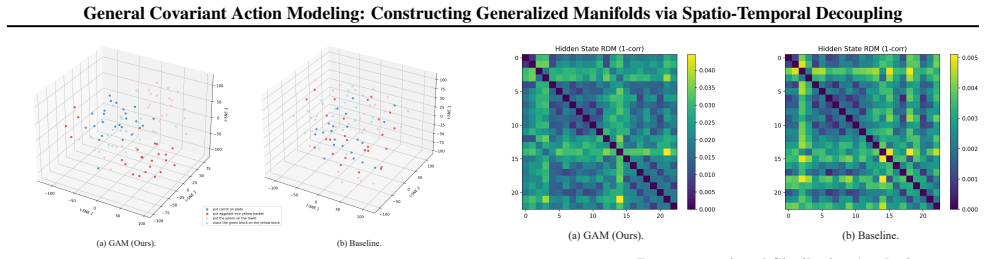
Achieving robust generalization from limited data is a central challenge in embodied intelligence. Prevailing methods fail by regressing absolute coordinates, which violates the principle of general covariance. Fundamentally, this conflates the intrinsic task geometry with rigid execution patterns, binding policies to specific motion styles and fixed speeds. To resolve this, we propose the Generalized Action Manifold (GAM) framework that enforces general covariance through structural disentanglement. Specifically, GAM realizes the manifold by enforcing invariance across two orthogonal dimensions: (1) Temporal Invariance, utilizing an Arc-Length Parameterizer to orthogonalize the spatial path geometry from temporal dynamics, ensuring robustness to velocity variations; (2) Geometric Invariance, where a Schema-Affine-Factorization mechanism maps trajectories to canonical ``world lines'' in a pose-normalized coordinate frame. This distinguishes invariant geometric schemas from affine modulations, ensuring spatial generalizability. By integrating GAM within a structured Vision-Language-Action (VLA) architecture, we enable sparse demonstrations to densely populate a continuous, valid action manifold. Empirical results demonstrate that GAM enables superior transfer and robustness capabilities, outperforming geometry-agnostic baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Generalized Action Manifold (GAM) framework to achieve general covariance in embodied action modeling via spatio-temporal decoupling. It claims that an Arc-Length Parameterizer enforces temporal invariance by orthogonalizing spatial path geometry from temporal dynamics, while a Schema-Affine-Factorization mechanism enforces geometric invariance by mapping trajectories to canonical world lines in a pose-normalized frame; these are integrated into a structured Vision-Language-Action architecture to enable dense population of a continuous action manifold from sparse demonstrations, yielding superior transfer and robustness over geometry-agnostic baselines.
Significance. If the mechanisms can be shown to mathematically realize the claimed invariances and the empirical superiority holds under rigorous validation, the work would offer a principled route to covariant action representations that could meaningfully advance generalization in robotics and embodied AI.
major comments (3)
- [Abstract] Abstract: The claim that the Arc-Length Parameterizer 'orthogonalize[s] the spatial path geometry from temporal dynamics' is presented without any equations, reparameterization rules, or invariance proof, so it is impossible to verify whether the construction actually decouples velocity variations while preserving manifold structure.
- [Abstract] Abstract: The Schema-Affine-Factorization is asserted to 'map trajectories to canonical world lines in a pose-normalized coordinate frame' and to 'distinguish invariant geometric schemas from affine modulations,' yet no transformation definitions, factorization equations, or derivation of the resulting invariance appear, leaving the sufficiency of this step for geometric generalizability uncheckable.
- [Abstract] Abstract: The statement that 'empirical results demonstrate that GAM enables superior transfer and robustness capabilities' is unsupported by any description of experimental protocol, datasets, quantitative metrics, error bars, or baseline comparisons, so the data cannot be assessed as bearing on the central claim.
minor comments (1)
- [Abstract] The phrase 'general covariance' is invoked without a precise definition in the non-relativistic, finite-dimensional setting of trajectory manifolds; a short clarifying sentence would prevent misreading.
Simulated Author's Rebuttal
We thank the referee for the comments. The abstract is a concise summary, with full mathematical details and experimental protocols provided in the body of the manuscript. We address each point below and will make targeted revisions to improve clarity in the abstract.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that the Arc-Length Parameterizer 'orthogonalize[s] the spatial path geometry from temporal dynamics' is presented without any equations, reparameterization rules, or invariance proof, so it is impossible to verify whether the construction actually decouples velocity variations while preserving manifold structure.
Authors: The abstract summarizes the high-level idea. The full manuscript (Section 3.1) defines the arc-length reparameterization s = ∫ ||dr/dt|| dt, derives the orthogonalization of spatial geometry from temporal speed, and proves invariance under monotonic time reparameterizations while preserving the manifold structure. We will revise the abstract to include a brief parenthetical reference to this invariance property. revision: partial
-
Referee: [Abstract] Abstract: The Schema-Affine-Factorization is asserted to 'map trajectories to canonical world lines in a pose-normalized coordinate frame' and to 'distinguish invariant geometric schemas from affine modulations,' yet no transformation definitions, factorization equations, or derivation of the resulting invariance appear, leaving the sufficiency of this step for geometric generalizability uncheckable.
Authors: Section 3.2 of the manuscript provides the explicit affine transformation definitions, the factorization into schema and modulation components, and the derivation showing mapping to canonical world lines in the normalized frame. We agree the abstract is too terse and will add a short clarifying phrase referencing the pose normalization step. revision: partial
-
Referee: [Abstract] Abstract: The statement that 'empirical results demonstrate that GAM enables superior transfer and robustness capabilities' is unsupported by any description of experimental protocol, datasets, quantitative metrics, error bars, or baseline comparisons, so the data cannot be assessed as bearing on the central claim.
Authors: The experimental details (datasets, VLA integration, metrics such as success rate and transfer error with standard deviations, and baseline comparisons) appear in Section 5. We will revise the abstract to include one concise sentence summarizing the key quantitative improvements. revision: yes
Circularity Check
No circularity: descriptive framework with no equations or self-citation reductions
full rationale
The provided abstract and text introduce the GAM framework and its two mechanisms (Arc-Length Parameterizer, Schema-Affine-Factorization) purely descriptively, claiming they enforce temporal and geometric invariance to realize general covariance. No equations, transformation rules, proofs, or parameter-fitting steps appear. No self-citations are referenced as load-bearing. Because no derivation chain exists to inspect for reductions to inputs by construction, none of the enumerated circularity patterns can be exhibited with quotes. The presentation is self-contained at the level of naming and high-level claims, with no fitted predictions or ansatzes smuggled via prior work.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Prevailing methods fail by regressing absolute coordinates, which violates the principle of general covariance.
invented entities (3)
-
Generalized Action Manifold (GAM)
no independent evidence
-
Arc-Length Parameterizer
no independent evidence
-
Schema-Affine-Factorization
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Gauss's Theoria Motus , Year =
Theory of the motion of the heavenly bodies moving about the sun in conic sections , Author =. Gauss's Theoria Motus , Year =
-
[2]
Advances in neural information processing systems , volume=
Alvinn: An autonomous land vehicle in a neural network , author=. Advances in neural information processing systems , volume=
-
[3]
International conference on machine learning , pages=
Self-supervised exploration via disagreement , author=. International conference on machine learning , pages=. 2019 , organization=
2019
-
[4]
Joseph-Louis Lagrange , publisher =. M
-
[5]
Advances in neural information processing systems , volume=
Language models are few-shot learners , author=. Advances in neural information processing systems , volume=
-
[6]
Radiology: Artificial Intelligence , volume=
On the opportunities and risks of foundation models for natural language processing in radiology , author=. Radiology: Artificial Intelligence , volume=. 2022 , publisher=
2022
-
[7]
Evaluating Real-World Robot Manipulation Policies in Simulation
Evaluating Real-World Robot Manipulation Policies in Simulation , author=. arXiv preprint arXiv:2405.05941 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Conference on Robot Learning , pages=
Bridgedata v2: A dataset for robot learning at scale , author=. Conference on Robot Learning , pages=. 2023 , organization=
2023
-
[9]
arXiv preprint arXiv:2409.20537 , year=
Scaling proprioceptive-visual learning with heterogeneous pre-trained transformers , author=. arXiv preprint arXiv:2409.20537 , year=
-
[10]
Advances in Neural Information Processing Systems , volume=
Libero: Benchmarking knowledge transfer for lifelong robot learning , author=. Advances in Neural Information Processing Systems , volume=
-
[11]
International Conference on Machine Learning , pages=
Deep unsupervised learning using nonequilibrium thermodynamics , author=. International Conference on Machine Learning , pages=. 2015 , organization=
2015
-
[12]
Neural Machine Translation of Rare Words with Subword Units
Sennrich, Rico and Haddow, Barry and Birch, Alexandra. Neural Machine Translation of Rare Words with Subword Units. Proceedings of the 54th Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers). 2016. doi:10.18653/v1/P16-1162
-
[13]
2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , year=
Autoregressive Image Generation using Residual Quantization , author=. 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , year=
2022
-
[14]
IEEE Robotics and Automation Letters , volume=
Prodmp: A unified perspective on dynamic and probabilistic movement primitives , author=. IEEE Robotics and Automation Letters , volume=. 2023 , publisher=
2023
-
[15]
Neural Information Processing Systems , year=
Neural Discrete Representation Learning , author=. Neural Information Processing Systems , year=
-
[16]
Forty-first International Conference on Machine Learning , year=
Scaling rectified flow transformers for high-resolution image synthesis , author=. Forty-first International Conference on Machine Learning , year=
-
[17]
Advances in Neural Information Processing Systems , volume=
Generative modeling by estimating gradients of the data distribution , author=. Advances in Neural Information Processing Systems , volume=
-
[18]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Scalable diffusion models with transformers , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[19]
Advances in neural information processing systems , volume=
Improved techniques for training score-based generative models , author=. Advances in neural information processing systems , volume=
-
[20]
International Conference on Learning Representations , year=
Score-Based Generative Modeling through Stochastic Differential Equations , author=. International Conference on Learning Representations , year=
-
[21]
Advances in Neural Information Processing Systems , volume=
Denoising diffusion probabilistic models , author=. Advances in Neural Information Processing Systems , volume=
-
[22]
NeurIPS 2021 Workshop on Deep Generative Models and Downstream Applications , year=
Classifier-Free Diffusion Guidance , author=. NeurIPS 2021 Workshop on Deep Generative Models and Downstream Applications , year=
2021
-
[23]
Conference on robot learning , pages=
Implicit behavioral cloning , author=. Conference on robot learning , pages=. 2022 , organization=
2022
-
[24]
arXiv preprint arXiv:2301.10677 , year=
Imitating human behaviour with diffusion models , author=. arXiv preprint arXiv:2301.10677 , year=
-
[25]
A generalist agent , author=. arXiv preprint arXiv:2205.06175 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[26]
ICLR , year=
Denoising Diffusion Implicit Models , author=. ICLR , year=
-
[27]
Advances in Neural Information Processing Systems , volume=
Diffusion models beat gans on image synthesis , author=. Advances in Neural Information Processing Systems , volume=
-
[28]
International Conference on Machine Learning , pages=
Improved denoising diffusion probabilistic models , author=. International Conference on Machine Learning , pages=. 2021 , organization=
2021
-
[29]
Advances in Neural Information Processing Systems , editor=
Elucidating the Design Space of Diffusion-Based Generative Models , author=. Advances in Neural Information Processing Systems , editor=. 2022 , url=
2022
-
[30]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
High-resolution image synthesis with latent diffusion models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[31]
Robotics and autonomous systems , volume=
A survey of robot learning from demonstration , author=. Robotics and autonomous systems , volume=. 2009 , publisher=
2009
-
[32]
Foundations and Trends
An algorithmic perspective on imitation learning , author=. Foundations and Trends. 2018 , publisher=
2018
-
[33]
Riemannian motion policies , author=. arXiv preprint arXiv:1801.02854 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[34]
Neural computation , volume=
Dynamical movement primitives: learning attractor models for motor behaviors , author=. Neural computation , volume=. 2013 , publisher=
2013
-
[35]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Film: Visual reasoning with a general conditioning layer , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[37]
International Conference on Learning Representations , year=
From Play to Policy: Conditional Behavior Generation from Uncurated Robot Data , author=. International Conference on Learning Representations , year=
-
[38]
Proceedings of Robotics: Science and Systems (RSS) , year=
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion , author=. Proceedings of Robotics: Science and Systems (RSS) , year=
-
[39]
8th Annual Conference on Robot Learning , year=
Scaling Robot Policy Learning via Zero-Shot Labeling with Foundation Models , author=. 8th Annual Conference on Robot Learning , year=
-
[40]
6th Annual Conference on Robot Learning , year=
R3M: A Universal Visual Representation for Robot Manipulation , author=. 6th Annual Conference on Robot Learning , year=
-
[41]
2016 IEEE international conference on robotics and automation (ICRA) , pages=
Supersizing self-supervision: Learning to grasp from 50k tries and 700 robot hours , author=. 2016 IEEE international conference on robotics and automation (ICRA) , pages=. 2016 , organization=
2016
-
[42]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Rt-2: Vision-language-action models transfer web knowledge to robotic control , author=. arXiv preprint arXiv:2307.15818 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[43]
Open X-Embodiment Collaboration , howpublished =. Open
-
[44]
2023 , url=
Brianna Zitkovich and Tianhe Yu and Sichun Xu and Peng Xu and Ted Xiao and Fei Xia and Jialin Wu and Paul Wohlhart and Stefan Welker and Ayzaan Wahid and Quan Vuong and Vincent Vanhoucke and Huong Tran and Radu Soricut and Anikait Singh and Jaspiar Singh and Pierre Sermanet and Pannag R Sanketi and Grecia Salazar and Michael S Ryoo and Krista Reymann and ...
2023
-
[46]
Fortieth International Conference on Machine Learning , year =
VIMA: General Robot Manipulation with Multimodal Prompts , author =. Fortieth International Conference on Machine Learning , year =
-
[47]
Proceedings of Robotics: Science and Systems (RSS) , year=
Goal Conditioned Imitation Learning using Score-based Diffusion Policies , author=. Proceedings of Robotics: Science and Systems (RSS) , year=
-
[48]
arXiv preprint arXiv:2107.09047 , year=
Know thyself: Transferable visual control policies through robot-awareness , author=. arXiv preprint arXiv:2107.09047 , year=
-
[49]
Robotics: Science and Systems , year=
Multimodal Diffusion Transformer: Learning Versatile Behavior from Multimodal Goals , author=. Robotics: Science and Systems , year=
-
[50]
arXiv preprint arXiv:2402.14606 , year=
Towards diverse behaviors: A benchmark for imitation learning with human demonstrations , author=. arXiv preprint arXiv:2402.14606 , year=
-
[51]
8th Annual Conference on Robot Learning , year=
Scaling Cross-Embodied Learning: One Policy for Manipulation, Navigation, Locomotion and Aviation , author=. 8th Annual Conference on Robot Learning , year=
-
[52]
arXiv preprint arXiv:2402.19432 , year=
Pushing the limits of cross-embodiment learning for manipulation and navigation , author=. arXiv preprint arXiv:2402.19432 , year=
-
[53]
arXiv preprint arXiv:2306.11706 , year=
Robocat: A self-improving foundation agent for robotic manipulation , author=. arXiv preprint arXiv:2306.11706 , year=
-
[54]
International Conference on Machine Learning , pages=
One policy to control them all: Shared modular policies for agent-agnostic control , author=. International Conference on Machine Learning , pages=. 2020 , organization=
2020
-
[55]
Conference on Robot Learning , pages=
Polybot: Training One Policy Across Robots While Embracing Variability , author=. Conference on Robot Learning , pages=. 2023 , organization=
2023
-
[56]
Conference on Robot Learning , pages=
Real-world robot learning with masked visual pre-training , author=. Conference on Robot Learning , pages=. 2023 , organization=
2023
-
[57]
Octo: An Open-Source Generalist Robot Policy , author =
-
[58]
arXiv preprint arXiv:2306.00937 , year=
STEVE-1: A Generative Model for Text-to-Behavior in Minecraft , author=. arXiv preprint arXiv:2306.00937 , year=
-
[59]
arXiv preprint arXiv:2311.16098 , year=
On Bringing Robots Home , author=. arXiv preprint arXiv:2311.16098 , year=
-
[60]
International Conference on Learning Representations , year=
Unleashing Large-Scale Video Generative Pre-training for Visual Robot Manipulation , author=. International Conference on Learning Representations , year=
-
[61]
arXiv preprint arXiv:2302.12766 , year=
Language-driven representation learning for robotics , author=. arXiv preprint arXiv:2302.12766 , year=
-
[62]
2023 , eprint=
RoboAgent: Generalization and Efficiency in Robot Manipulation via Semantic Augmentations and Action Chunking , author=. 2023 , eprint=
2023
-
[63]
Thirty-seventh Conference on Neural Information Processing Systems , year=
Information Maximizing Curriculum: A Curriculum-Based Approach for Learning Versatile Skills , author=. Thirty-seventh Conference on Neural Information Processing Systems , year=
-
[64]
Advances in Neural Information Processing Systems , volume=
Hardware conditioned policies for multi-robot transfer learning , author=. Advances in Neural Information Processing Systems , volume=
-
[65]
arXiv preprint arXiv:2407.15002 , year=
GET-Zero: Graph Embodiment Transformer for Zero-shot Embodiment Generalization , author=. arXiv preprint arXiv:2407.15002 , year=
-
[66]
Advances in Neural Information Processing Systems , volume=
Learning to control self-assembling morphologies: a study of generalization via modularity , author=. Advances in Neural Information Processing Systems , volume=
-
[67]
and Heess, Nicolas , booktitle =
Watson, Joe and Huang, Sandy H. and Heess, Nicolas , booktitle =. Coherent Soft Imitation Learning , year =
-
[68]
3D Diffuser Actor: Policy Diffusion with 3D Scene Representations
3d diffuser actor: Policy diffusion with 3d scene representations , author=. arXiv preprint arXiv:2402.10885 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[69]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
Flow straight and fast: Learning to generate and transfer data with rectified flow , author=. arXiv preprint arXiv:2209.03003 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[70]
Building Normalizing Flows with Stochastic Interpolants
Building normalizing flows with stochastic interpolants , author=. arXiv preprint arXiv:2209.15571 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[71]
Flow Matching for Generative Modeling
Flow matching for generative modeling , author=. arXiv preprint arXiv:2210.02747 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[72]
arXiv preprint arXiv:2409.04576 , year=
ActionFlow: Equivariant, Accurate, and Efficient Policies with Spatially Symmetric Flow Matching , author=. arXiv preprint arXiv:2409.04576 , year=
-
[73]
arXiv preprint arXiv:2409.01083 , year=
Affordance-based Robot Manipulation with Flow Matching , author=. arXiv preprint arXiv:2409.01083 , year=
-
[74]
arXiv preprint arXiv:2403.10672 , year=
Riemannian Flow Matching Policy for Robot Motion Learning , author=. arXiv preprint arXiv:2403.10672 , year=
-
[75]
Guided flows for generative modeling and decision making , author=. arXiv preprint arXiv:2311.13443 , year=
-
[76]
Advances in neural information processing systems , volume=
Neural ordinary differential equations , author=. Advances in neural information processing systems , volume=
-
[77]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
pi\_0 : A Vision-Language-Action Flow Model for General Robot Control , author=. arXiv preprint arXiv:2410.24164 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[78]
arXiv preprint arXiv:2409.05865 , year=
Robot utility models: General policies for zero-shot deployment in new environments , author=. arXiv preprint arXiv:2409.05865 , year=
-
[79]
The Thirty-eighth Annual Conference on Neural Information Processing Systems , year=
Scaling Proprioceptive-Visual Learning with Heterogeneous Pre-trained Transformers , author=. The Thirty-eighth Annual Conference on Neural Information Processing Systems , year=
-
[80]
TinyVLA: Towards Fast, Data-Efficient Vision-Language-Action Models for Robotic Manipulation
Tinyvla: Towards fast, data-efficient vision-language-action models for robotic manipulation , author=. arXiv preprint arXiv:2409.12514 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[81]
Mixture-of-Transformers: A Sparse and Scalable Architecture for Multi-Modal Foundation Models
Mixture-of-Transformers: A Sparse and Scalable Architecture for Multi-Modal Foundation Models , author=. arXiv preprint arXiv:2411.04996 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[82]
PaliGemma: A versatile 3B VLM for transfer
Paligemma: A versatile 3b vlm for transfer , author=. arXiv preprint arXiv:2407.07726 , year=
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.