Geodesic Flow Matching for Denoising High-Dimensional Structured Representations
Pith reviewed 2026-06-28 22:26 UTC · model grok-4.3
The pith
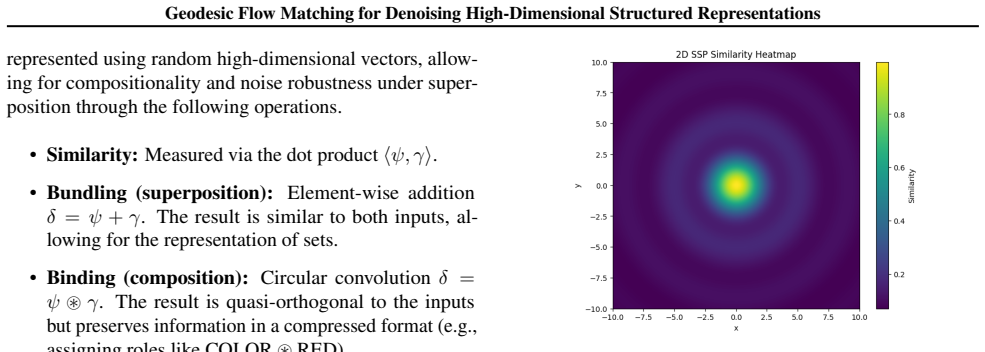
Geodesic Flow Matching restricts denoising flows to the toroidal manifold of Spatial Semantic Pointers so that paths preserve the phase and magnitude needed for accurate decoding.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
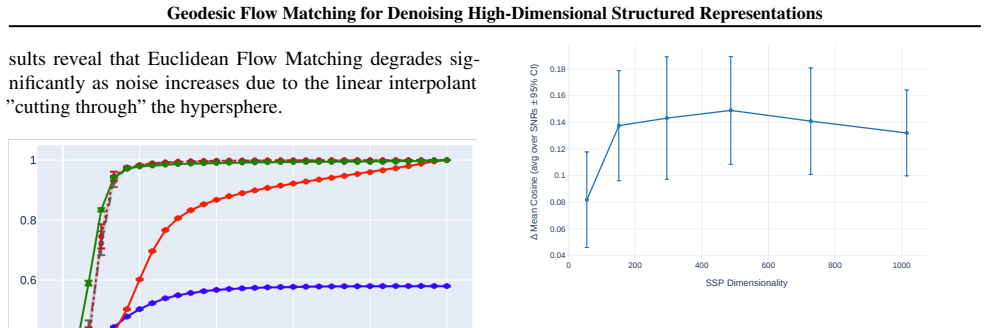
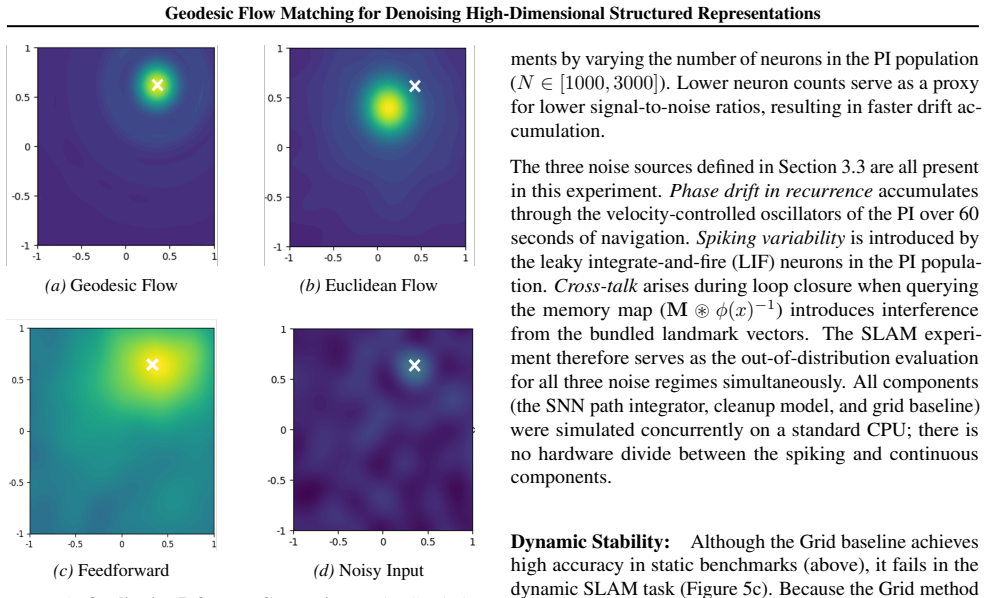
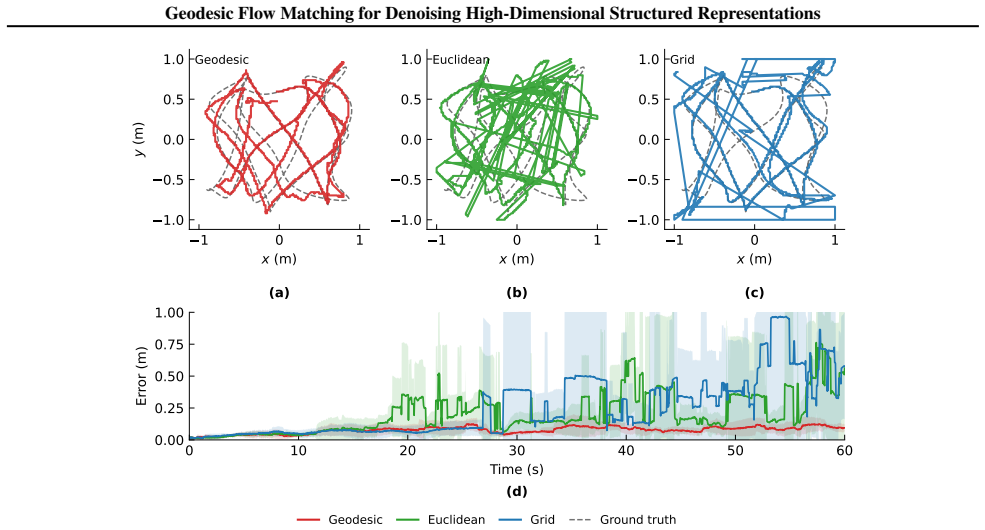
We demonstrate that this assumption fails for SSPs: Euclidean linear interpolants cut through the manifold's interior, destroying the phase and magnitude structure required for accurate decoding. To resolve this, we employ Geodesic Flow Matching, adapting Riemannian transport dynamics to strictly restrict the denoising flow to the SSP toroidal manifold. We validate this approach in a Spiking Neural SLAM system, showing that manifold-aware cleanup stabilizes path integration against drift.
What carries the argument
Geodesic Flow Matching, which adapts Riemannian transport dynamics to keep the entire denoising trajectory on the toroidal manifold of Spatial Semantic Pointers.
If this is right
- Manifold-aware cleanup stabilizes path integration against drift in spiking neural SLAM systems.
- The method achieves a 72% reduction in tracking error compared to competitive baselines.
- It enables a 40% increase in neural efficiency compared to competitive baselines.
- The same geodesic restriction applies to any denoising task that must respect the toroidal geometry of continuous SSP encodings.
Where Pith is reading between the lines
- The same geodesic adaptation could be applied to other vector-symbolic representations that live on curved manifolds, such as those used in robotic control or perceptual binding.
- If the toroidal constraint is relaxed, one could test whether the performance gain disappears, isolating the contribution of manifold geometry versus the flow-matching formulation.
- The approach suggests that any generative model operating on structured high-dimensional codes may need geometry-aware transport rather than Euclidean defaults.
Load-bearing premise
Euclidean linear interpolants necessarily destroy the phase and magnitude structure required for accurate SSP decoding while geodesic paths on the toroidal manifold preserve it.
What would settle it
Measure whether trajectories generated by the geodesic method remain on the manifold surface (via distance-to-manifold metric) and whether Euclidean trajectories produce measurably higher decoding error on the same noisy SSP inputs.
Figures

read the original abstract
Vector Symbolic Algebras (VSAs) enable robust neurosymbolic reasoning by encoding symbolic information into high-dimensional distributed representations. For continuous domains, Spatial Semantic Pointers (SSPs) extend this framework by mapping variables onto continuous toroidal manifolds. However, standard approaches like Flow Matching assume a flat Euclidean geometry, which fails to account for the geometric constraints imposed on valid SSP states. We demonstrate that this assumption fails for SSPs: Euclidean linear interpolants ``cut through" the manifold's interior, destroying the phase and magnitude structure required for accurate decoding. To resolve this, we employ Geodesic Flow Matching, adapting Riemannian transport dynamics to strictly restrict the denoising flow to the SSP toroidal manifold. We validate this approach in a Spiking Neural SLAM system, showing that manifold-aware cleanup stabilizes path integration against drift. The method achieves a 72\% reduction in tracking error and enables a 40\% increase in neural efficiency compared to competitive baselines. Code is available at https://github.com/kremHabashy/CleanupSSP .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that standard flow matching fails for Spatial Semantic Pointers (SSPs) because Euclidean linear interpolants cut through the toroidal manifold and destroy the phase/magnitude structure needed for decoding. It proposes Geodesic Flow Matching to restrict denoising flows to the manifold via Riemannian transport, and reports validation in a Spiking Neural SLAM system with a 72% reduction in tracking error and 40% increase in neural efficiency over baselines.
Significance. If the central geometric claim and empirical gains hold under rigorous testing, the work would provide a principled way to incorporate manifold constraints into generative models for vector symbolic algebras, with direct relevance to neurosymbolic systems and path integration. The open code link is a strength for reproducibility.
major comments (2)
- [Abstract] Abstract: The assertion that Euclidean linear interpolants necessarily destroy SSP phase and magnitude structure (while geodesics preserve it) is load-bearing for the motivation and for attributing the 72%/40% gains to manifold awareness, yet the manuscript supplies no quantitative support such as decoding-error curves along linear vs. geodesic segments or analysis of high-dimensional toroidal effects on the interpolant.
- [Abstract] Abstract and experimental description: No experimental protocol, baseline definitions, statistical tests, error bars, or ablation isolating the manifold restriction are provided, preventing verification that the reported performance numbers are supported by the data rather than by unstated implementation choices.
minor comments (1)
- The GitHub link is given but the manuscript does not specify which scripts reproduce the SLAM experiments or the exact SSP dimensionality and noise regime used.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments highlight areas where the manuscript can be strengthened with additional quantitative motivation and experimental detail. We address each point below and will revise accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that Euclidean linear interpolants necessarily destroy SSP phase and magnitude structure (while geodesics preserve it) is load-bearing for the motivation and for attributing the 72%/40% gains to manifold awareness, yet the manuscript supplies no quantitative support such as decoding-error curves along linear vs. geodesic segments or analysis of high-dimensional toroidal effects on the interpolant.
Authors: We agree that the manuscript would benefit from explicit quantitative support for this central claim. In the revised version we will add decoding-error curves comparing linear and geodesic interpolants, together with analysis of phase/magnitude degradation as a function of dimension and toroidal geometry, to directly demonstrate the effect. revision: yes
-
Referee: [Abstract] Abstract and experimental description: No experimental protocol, baseline definitions, statistical tests, error bars, or ablation isolating the manifold restriction are provided, preventing verification that the reported performance numbers are supported by the data rather than by unstated implementation choices.
Authors: We acknowledge that the current manuscript lacks sufficient experimental detail. We will expand the methods and results sections to include the full experimental protocol, precise baseline definitions, statistical tests, error bars, and an ablation study that isolates the manifold-restriction component of Geodesic Flow Matching. revision: yes
Circularity Check
No significant circularity; derivation adapts external methods without self-referential reduction
full rationale
The paper presents Geodesic Flow Matching as an adaptation of standard flow matching and Riemannian geometry to the SSP toroidal manifold, with the central performance claims (72% error reduction, 40% efficiency gain) arising from empirical validation in a Spiking Neural SLAM system rather than from any equation or parameter that reduces tautologically to the method's own definition or prior self-citations. No load-bearing step equates a prediction to a fitted input, imports uniqueness via self-citation chains, or renames known results; the justification for manifold restriction is asserted via geometric argument but does not collapse the reported outcomes by construction. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Valid SSP states lie on a toroidal manifold whose interior must not be traversed by denoising paths.
Reference graph
Works this paper leans on
-
[1]
J., Ambrogioni, L., and Krotov, D
Memorization to generalization: Emergence of diffusion models from associative memory , author=. arXiv preprint arXiv:2505.21777 , year=
-
[2]
Frontiers in Neuroscience , year=
Deep Learning With Spiking Neurons: Opportunities and Challenges , author=. Frontiers in Neuroscience , year=
-
[3]
Advances in neural information processing systems , volume=
Binding in hippocampal-entorhinal circuits enables compositionality in cognitive maps , author=. Advances in neural information processing systems , volume=
-
[4]
41st Annual Meeting of the Cognitive Science Society , year=
Representing spatial relations with fractional binding , author=. 41st Annual Meeting of the Cognitive Science Society , year=
-
[5]
Proceedings of the AAAI Symposium Series , volume=
Bridging cognitive architectures and generative models with vector symbolic algebras , author=. Proceedings of the AAAI Symposium Series , volume=
-
[6]
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Riemannian flow matching policy for robot motion learning , author=. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2024 , organization=
2024
-
[7]
2023 , eprint=
Fast protein backbone generation with SE(3) flow matching , author=. 2023 , eprint=
2023
-
[8]
2021 , eprint=
Geometric Deep Learning: Grids, Groups, Graphs, Geodesics, and Gauges , author=. 2021 , eprint=
2021
-
[9]
Proceedings of the Annual Meeting of the Cognitive Science Society , volume=
A neural representation of continuous space using fractional binding , author=. Proceedings of the Annual Meeting of the Cognitive Science Society , volume=
-
[10]
Proceedings of the Annual Meeting of the Cognitive Science Society , volume=
Efficient navigation using a scalable, biologically inspired spatial representation , author=. Proceedings of the Annual Meeting of the Cognitive Science Society , volume=
-
[11]
Frontiers in Neuroscience , volume=
Exploiting semantic information in a spiking neural SLAM system , author=. Frontiers in Neuroscience , volume=. 2023 , publisher=
2023
-
[12]
Neural Computation , volume=
Simulating and predicting dynamical systems with spatial semantic pointers , author=. Neural Computation , volume=. 2021 , publisher=
2021
-
[13]
Memory in Plain Sight: Surveying the Uncanny Resemblances of Associative Memories and Diffusion Models , author=. arXiv preprint arXiv:2309.16750 , year=
-
[14]
Annual Meeting of the Cognitive Science Society , year=
Accurate representation for spatial cognition using grid cells , author=. Annual Meeting of the Cognitive Science Society , year=
-
[15]
Nature , year=
Toroidal topology of population activity in grid cells , author=. Nature , year=
-
[16]
Mathematical programming , volume=
On the limited memory BFGS method for large scale optimization , author=. Mathematical programming , volume=. 1989 , publisher=
1989
-
[17]
arXiv preprint arXiv:2504.10612 , year=
Energy Matching: Unifying Flow Matching and Energy-Based Models for Generative Modeling , author=. arXiv preprint arXiv:2504.10612 , year=
-
[18]
Stewart and Yichuan Tang and Chris Eliasmith , title=
Terrence C. Stewart and Yichuan Tang and Chris Eliasmith , title=. Cogn. Syst. Res. , volume=. 2011 , cdate=
2011
-
[19]
, author=
Neural networks and physical systems with emergent collective computational abilities. , author=. Proceedings of the National Academy of Sciences of the United States of America , year=
-
[20]
Hopfield Networks is All You Need
Hopfield networks is all you need , author=. arXiv preprint arXiv:2008.02217 , year=
work page internal anchor Pith review Pith/arXiv arXiv 2008
-
[21]
Flow Matching for Generative Modeling
Flow matching for generative modeling , author=. arXiv preprint arXiv:2210.02747 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[22]
International Conference on Learning Representations , volume=
Flow matching on general geometries , author=. International Conference on Learning Representations , volume=
-
[23]
, title =
Plate, Tony A. , title =. IEEE Transactions on Neural Networks , volume =
-
[24]
Artificial Intelligence Review , volume=
A comparison of vector symbolic architectures , author=. Artificial Intelligence Review , volume=. 2022 , publisher=
2022
-
[25]
Advances in Neural Information Processing Systems , volume=
Hyperspherical prototype networks , author=. Advances in Neural Information Processing Systems , volume=
-
[26]
34th Conference on Uncertainty in Artificial Intelligence 2018, UAI 2018 , pages=
Hyperspherical variational auto-encoders , author=. 34th Conference on Uncertainty in Artificial Intelligence 2018, UAI 2018 , pages=. 2018 , organization=
2018
-
[27]
arXiv preprint arXiv:1910.02912 , year=
Increasing expressivity of a hyperspherical vae , author=. arXiv preprint arXiv:1910.02912 , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.