Belief Consistency Between Foundation-Model Evidence and Geometric Perception in Persistent Robotic Maps
Pith reviewed 2026-06-28 21:48 UTC · model grok-4.3
The pith
A commit gate and conflict-drop window let robots keep only the foundation-model semantic claims that match their geometric perception in persistent maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
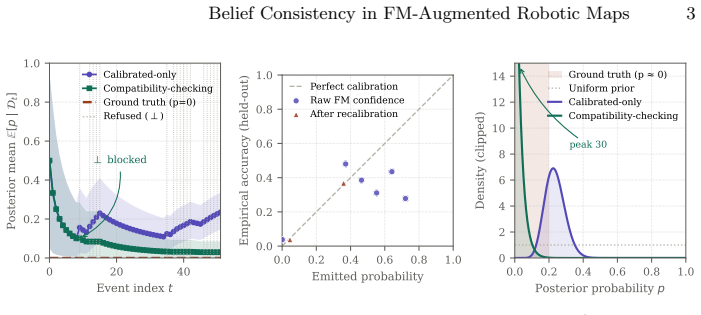
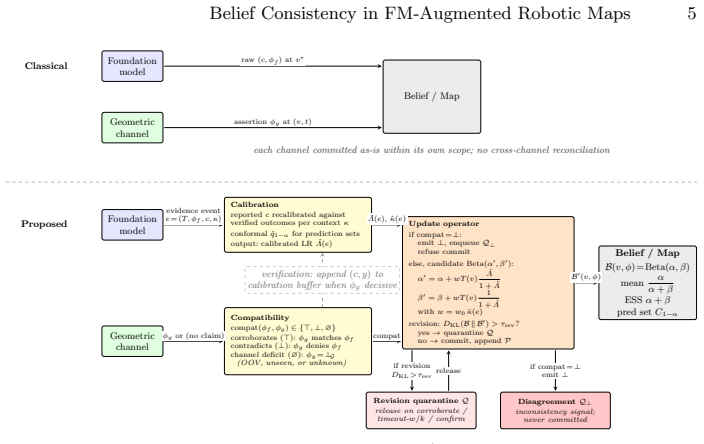
The operator with a per-class calibrated commit gate and a per-event conflict-drop window refuses to commit foundation-model claims contradicted by the geometric channel at the moment of the claim. On KITTI-360 and ScanNet, with both oracle and off-the-shelf geometric channels, the operator produces substantially more accurate committed maps, retains more compositional true positives at higher precision than a monolithic compositional VLM prompt, operates at deployment quality across geometric channels, and remains invariant under foundation-model substitution.
What carries the argument
The update operator consisting of a per-class calibrated commit gate and a per-event conflict-drop window that enforces moment-of-claim consistency before any label is added to the persistent map.
If this is right
- The operator achieves car commit precision of 99.7 percent on KITTI versus 43.9 percent without the conflict-drop window.
- Mean per-class IoU rises from 0.180 to 0.522 on the same data.
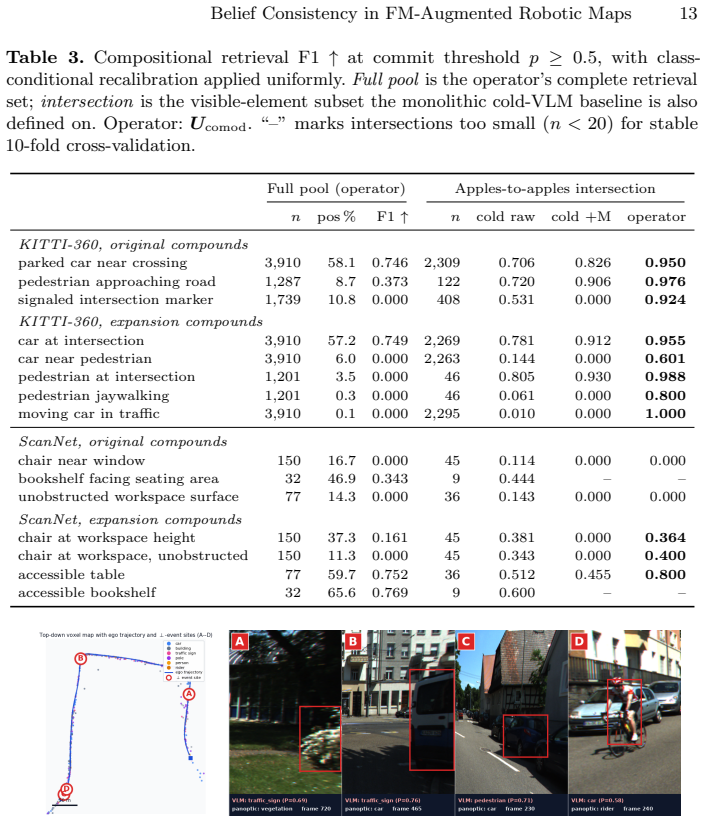
- The framework retains more compositional true positives at higher precision than monolithic VLM prompting.
- Performance holds at deployment quality for both oracle ground-truth geometry and an off-the-shelf online segmenter.
- The operator remains invariant when the foundation model is swapped for another.
Where Pith is reading between the lines
- The same consistency mechanism could filter foundation-model outputs in other robotic tasks that already possess a reliable geometric or proprioceptive channel.
- Longer-duration mapping runs would show whether repeated conflict drops accumulate into measurable map sparsity over time.
- Feeding the refused claims back as negative training signals might improve future foundation-model reliability on geometric scenes.
Load-bearing premise
The geometric perception channel supplies assertions reliable enough to detect and refuse foundation-model claims that contradict it at the moment of the claim.
What would settle it
A test set in which the geometric channel systematically errs on objects where the foundation model is correct, such that dropping the conflicting foundation-model claims lowers final map accuracy below the calibration-only baseline.
Figures
read the original abstract
Persistent maps used by autonomous robots increasingly fuse a geometric perception stack whose assertions are well-characterized with a foundation-model channel that produces semantic claims without calibrated reliability about the same scene. Contemporary mapping systems integrate the two channels by treating the foundation-model channel as an additional voter into a per-element posterior, uncalibrated for its own per-class reliability and without machinery to flag when the two channels contradict each other at a given moment. We propose an update operator with two cooperating mechanisms: a per-class calibrated commit gate, and a per-event conflict-drop window that refuses to commit foundation-model claims contradicted by the geometric channel at the moment of the claim. We evaluate on KITTI-360 and ScanNet, with an oracle geometric channel (panoptic ground truth) and an off-the-shelf online semantic segmenter (Mask2Former) to demonstrate real-world performance. The operator produces substantially more accurate committed maps (KITTI is car commit precision 99.7% vs. 43.9% for the calibration-only operator; mean per-class IoU 0.522 vs. 0.180), retains more compositional true positives at higher precision than a monolithic compositional VLM prompt. The framework operates at deployment quality across both oracle and off-the-shelf-segmenter geometric channels, and is invariant under foundation-model substitution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an update operator for persistent robotic maps fusing foundation-model semantic claims with geometric perception assertions. The operator uses a per-class calibrated commit gate and a per-event conflict-drop window to refuse foundation-model claims contradicted by the geometric channel at claim time. Evaluations on KITTI-360 and ScanNet (with both oracle panoptic ground truth and off-the-shelf Mask2Former) report substantially higher committed-map accuracy than calibration-only or monolithic VLM baselines (e.g., KITTI car commit precision 99.7% vs. 43.9%; mean per-class IoU 0.522 vs. 0.180), while retaining more compositional true positives and remaining invariant under foundation-model substitution.
Significance. If the central mechanisms function as described, the work supplies a concrete, deployment-oriented solution to the problem of uncalibrated fusion between reliable geometric perception and unreliable foundation-model evidence. The dual-channel evaluation (oracle and real segmenter) and the explicit comparison against both calibration-only and monolithic prompting baselines are strengths; the use of public datasets and the parameter-free character of the conflict logic further support potential impact in robotic mapping.
major comments (2)
- [Evaluation section (KITTI-360 and ScanNet results)] The headline precision and IoU gains on KITTI-360 rest on the conflict-drop window correctly refusing only when the geometric channel is right. No auxiliary table or subsection reports conflict-detection precision/recall (or false-positive/false-negative rates) against oracle contradictions, so it is impossible to determine whether the reported improvements arise from accurate consistency enforcement or from systematic over-refusal of valid foundation-model claims.
- [Methods (commit gate definition)] The per-class calibration of the commit gate is presented as feasible without post-hoc selection effects, yet the manuscript supplies no description of the calibration procedure, the data splits used for calibration versus test, or any cross-validation that would confirm the calibration remains valid under the same distribution shift that affects the geometric channel.
minor comments (2)
- [Abstract] The abstract states concrete numerical results but does not cite the corresponding tables or figures that contain those numbers.
- [Methods] Notation for the conflict-drop window and commit gate should be introduced with explicit equations rather than prose descriptions alone.
Simulated Author's Rebuttal
We thank the referee for the constructive review and for recognizing the potential deployment impact of the proposed update operator. We address each major comment below.
read point-by-point responses
-
Referee: [Evaluation section (KITTI-360 and ScanNet results)] The headline precision and IoU gains on KITTI-360 rest on the conflict-drop window correctly refusing only when the geometric channel is right. No auxiliary table or subsection reports conflict-detection precision/recall (or false-positive/false-negative rates) against oracle contradictions, so it is impossible to determine whether the reported improvements arise from accurate consistency enforcement or from systematic over-refusal of valid foundation-model claims.
Authors: We agree that reporting conflict-detection performance metrics is necessary to isolate the contribution of the conflict-drop window. In the revised manuscript we will add a dedicated subsection (and accompanying table) that computes precision, recall, and F1 of conflict detection against oracle contradictions on both KITTI-360 and ScanNet, for both the oracle geometric channel and the Mask2Former channel. This analysis will confirm that the observed accuracy gains derive from accurate refusal of contradicted claims rather than indiscriminate dropping. revision: yes
-
Referee: [Methods (commit gate definition)] The per-class calibration of the commit gate is presented as feasible without post-hoc selection effects, yet the manuscript supplies no description of the calibration procedure, the data splits used for calibration versus test, or any cross-validation that would confirm the calibration remains valid under the same distribution shift that affects the geometric channel.
Authors: The referee is correct that the current manuscript lacks an explicit description of the calibration protocol. We will revise the Methods section to detail the full calibration procedure: per-class threshold selection on a held-out calibration subset drawn from the training sequences (disjoint from all test sequences), the exact optimization criterion used, and the absence of any post-hoc selection on test data. We will also add a short discussion of robustness under distribution shift, supported by the existing dual-channel (oracle vs. Mask2Former) results already present in the evaluation. revision: yes
Circularity Check
No circularity; empirical claims rest on external public datasets and off-the-shelf components
full rationale
The paper defines an update operator (commit gate + conflict-drop window) and reports end-to-end metrics (commit precision, IoU) on KITTI-360 and ScanNet against ground truth, using both oracle and Mask2Former channels. No equations or steps reduce by construction to fitted parameters, self-citations, or renamed inputs; the framework is tested for invariance under FM substitution without internal redefinition of the target quantities.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Journal of Symbolic Logic50(2), 510–530 (1985)
Alchourr´ on, C.E., G¨ ardenfors, P., Makinson, D.: On the logic of theory change: Partial meet contraction and revision functions. Journal of Symbolic Logic50(2), 510–530 (1985)
1985
-
[2]
Foundations and Trends in Machine Learning16(4), 494–591 (2023)
Angelopoulos, A.N., Bates, S.: A gentle introduction to conformal prediction and distribution- free uncertainty quantification. Foundations and Trends in Machine Learning16(4), 494–591 (2023)
2023
-
[3]
In: ICRA (2021)
Asgharivaskasi, A., Atanasov, N.: Active Bayesian multi-class mapping from range and semantic segmentation observations. In: ICRA (2021)
2021
-
[4]
IEEE Trans
Asgharivaskasi, A., Atanasov, N.: Semantic OcTree mapping and Shannon mutual information computation for robot exploration. IEEE Trans. Robotics39(3), 1910–1928 (2023)
1910
-
[5]
IEEE Robot
Bavle, H., Sanchez-Lopez, J.L., Shaheer, M., Civera, J., Voos, H.: S-Graphs 2.0 – a hierarchical- semantic optimization and loop closure for SLAM. IEEE Robot. Autom. Lett. (2025)
2025
-
[6]
In: IROS (2019)
Chen, X., Milioto, A., Palazzolo, E., Gigu` ere, P., Behley, J., Stachniss, C.: SuMa++: Efficient LiDAR-based semantic SLAM. In: IROS (2019)
2019
-
[7]
In: CVPR (2022)
Cheng, B., Misra, I., Schwing, A.G., Kirillov, A., Girdhar, R.: Masked-attention mask transformer for universal image segmentation. In: CVPR (2022)
2022
-
[8]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Dai, A., Chang, A.X., Savva, M., Halber, M., Funkhouser, T., Nießner, M.: ScanNet: Richly- annotated 3D reconstructions of indoor scenes. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
2017
-
[9]
IEEE Trans
Doherty, K., Shan, T., Wang, J., Englot, B.: Learning-aided 3-d occupancy mapping with Bayesian generalized kernel inference. IEEE Trans. Robotics35(4), 953–966 (2019)
2019
-
[10]
In: ICRA (2017)
Doherty, K., Wang, J., Englot, B.: Bayesian generalized kernel inference for occupancy map prediction. In: ICRA (2017)
2017
-
[11]
IEEE Robot
Gan, L., Zhang, R., Grizzle, J.W., Eustice, R.M., Ghaffari, M.: Bayesian spatial kernel smoothing for scalable dense semantic mapping. IEEE Robot. Autom. Lett.5(2), 790–797 (2020)
2020
-
[12]
MIT Press (1988) 16 Heckman, Biggie, Crowe, Roy
G¨ ardenfors, P.: Knowledge in Flux: Modeling the Dynamics of Epistemic States. MIT Press (1988) 16 Heckman, Biggie, Crowe, Roy
1988
-
[13]
In: NeurIPS (2021)
Gibbs, I., Cand` es, E.: Adaptive conformal inference under distribution shift. In: NeurIPS (2021)
2021
-
[14]
In: CVPR (2026)
Gorlo, N., Schmid, L., Carlone, L.: Describe anything anywhere at any moment: Hierarchical 4D scene graphs with open-vocabulary language. In: CVPR (2026)
2026
-
[15]
IEEE Robot
Grinvald, M., Furrer, F., Novkovic, T., Chung, J.J., Cadena, C., Siegwart, R., Nieto, J.: Volu- metric instance-aware semantic mapping and 3D object discovery. IEEE Robot. Autom. Lett. 4(3), 3037–3044 (2019)
2019
-
[16]
In: ICRA (2024)
Gu, Q., Kuwajerwala, A., Morin, S., Jatavallabhula, K.M., Sen, B., et al.: ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning. In: ICRA (2024)
2024
-
[17]
Autonomous Robots34(3), 189–206 (2013)
Hornung, A., Wurm, K.M., Bennewitz, M., Stachniss, C., Burgard, W.: OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Autonomous Robots34(3), 189–206 (2013)
2013
-
[18]
In: Robotics: Science and Systems (RSS) (2022)
Hughes, N., Chang, Y., Carlone, L.: Hydra: A real-time spatial perception system for 3D scene graph construction and optimization. In: Robotics: Science and Systems (RSS) (2022)
2022
-
[19]
The International Journal of Robotics Research43(10) (2024)
Hughes, N., Chang, Y., Hu, S., Talak, R., Abdulhai, R., Strader, J., Carlone, L.: Foundations of spatial perception for robotics: Hierarchical representations and real-time systems. The International Journal of Robotics Research43(10) (2024)
2024
-
[20]
In: Robotics: Science and Systems (RSS) (2023)
Jatavallabhula, K.M., Kuwajerwala, A., Gu, Q., Omama, M., Chen, T., et al.: ConceptFusion: Open-set multimodal 3D mapping. In: Robotics: Science and Systems (RSS) (2023)
2023
-
[21]
Jocher, G., Qiu, J., Chaurasia, A.: Ultralytics YOLO (2023), https://github.com/ultralytics/ ultralytics
2023
-
[22]
In: ICCV (2023)
Kerr, J., Kim, C.M., Goldberg, K., Kanazawa, A., Tancik, M.: LERF: Language embedded radiance fields. In: ICCV (2023)
2023
-
[23]
In: Handbook of Knowledge Representation
Lakemeyer, G., Levesque, H.J.: Cognitive robotics. In: Handbook of Knowledge Representation. Elsevier (2007)
2007
-
[24]
In: ICRA (2025)
Li, B., Cai, Z., Li, Y.F., Reid, I., Rezatofighi, H.: Hier-SLAM: Scaling-up semantics in SLAM with a hierarchically categorical Gaussian splatting. In: ICRA (2025)
2025
-
[25]
IEEE Trans
Liao, Y., Xie, J., Geiger, A.: KITTI-360: A novel dataset and benchmarks for urban scene understanding in 2D and 3D. IEEE Trans. Pattern Anal. Mach. Intell.45(3), 3292–3310 (2023)
2023
-
[26]
Au- tonomous Robots4(4), 333–349 (1997)
Lu, F., Milios, E.: Globally consistent range scan alignment for environment mapping. Au- tonomous Robots4(4), 333–349 (1997)
1997
- [27]
-
[28]
IEEE Robotics and Automation Letters9(10), 8921–8928 (2024)
Maggio, D., Chang, Y., Hughes, N., Trang, M., Griffith, D., Dougherty, C., Cristofalo, E., Schmid, L., Carlone, L.: Clio: Real-time task-driven open-set 3D scene graphs. IEEE Robotics and Automation Letters9(10), 8921–8928 (2024)
2024
-
[29]
In: ICRA (2017)
McCormac, J., Handa, A., Davison, A.J., Leutenegger, S.: SemanticFusion: Dense 3D semantic mapping with convolutional neural networks. In: ICRA (2017)
2017
-
[30]
In: IROS (2019)
Narita, G., Seno, T., Ishikawa, T., Kaji, Y.: PanopticFusion: Online volumetric semantic mapping at the level of stuff and things. In: IROS (2019)
2019
-
[31]
In: CVPR (2023)
Peng, S., Genova, K., Jiang, C., Tagliasacchi, A., Pollefeys, M., Funkhouser, T.: OpenScene: 3D scene understanding with open vocabularies. In: CVPR (2023)
2023
-
[32]
In: ICLR (2024)
Quach, V., Fisch, A., Schuster, T., Yala, A., Sohn, J.H., Jaakkola, T.S., Barzilay, R.: Conformal language modeling. In: ICLR (2024)
2024
-
[33]
MIT Press (2001)
Reiter, R.: Knowledge in Action: Logical Foundations for Specifying and Implementing Dynamical Systems. MIT Press (2001)
2001
-
[34]
In: CoRL (2023)
Ren, A.Z., Dixit, A., Bodrova, A., Singh, S., Tu, S., Brown, N., Xu, P., Takayama, L., Xia, F., Varley, J., et al.: Robots that ask for help: Uncertainty alignment for large language model planners. In: CoRL (2023)
2023
-
[35]
In: ICRA (2020)
Rosinol, A., Abate, M., Chang, Y., Carlone, L.: Kimera: An open-source library for real-time metric-semantic localization and mapping. In: ICRA (2020)
2020
-
[36]
The International Journal of Robotics Research40(12-14) (2021)
Rosinol, A., Violette, A., Abate, M., Hughes, N., Chang, Y., Shi, J., Gupta, A., Carlone, L.: Kimera: From SLAM to spatial perception with 3D dynamic scene graphs. The International Journal of Robotics Research40(12-14) (2021)
2021
-
[37]
In: Robotics: Science and Systems (RSS) (2024)
Schmid, L., Abate, M., Chang, Y., Carlone, L.: Khronos: A unified approach for spatio-temporal metric-semantic SLAM in dynamic environments. In: Robotics: Science and Systems (RSS) (2024)
2024
-
[38]
In: IROS (2017)
S¨ underhauf, N., Pham, T.T., Latif, Y., Milford, M., Reid, I.: Meaningful maps with object- oriented semantic mapping. In: IROS (2017)
2017
-
[39]
Springer (2005)
Vovk, V., Gammerman, A., Shafer, G.: Algorithmic Learning in a Random World. Springer (2005)
2005
-
[40]
IEEE Trans
Wilson, J., Fu, Y., Friesen, J., Ewen, P., Capodieci, A., Jayakumar, P., Barton, K., Ghaffari, M.: ConvBKI: Real-time probabilistic semantic mapping network with quantifiable uncertainty. IEEE Trans. Robotics (2024)
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.