SoFiE: Soft Finger Exoskeleton for Intelligent Grasping
Pith reviewed 2026-06-28 21:43 UTC · model grok-4.3
The pith
A 3D-printed soft finger exoskeleton assists index flexion while sensing pose, contact force, and object stiffness through integrated StretchSense and MagSense elements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SoFiE shows that a fully untethered soft exoskeleton can combine tendon-driven actuation, proprioceptive sensing via the StretchSense conductive spring, and tactile sensing via the MagSense magnet-magnetometer pair to deliver reliable finger-pose estimation from motor feedback, distinguish object stiffness, and produce distinct sensor signatures across grasping tasks, all controlled by an embedded microcontroller.
What carries the argument
StretchSense conductive spring for combined extension and proprioception plus MagSense magnet-magnetometer pair for contact force and compliance estimation, supported by motor encoder feedback.
If this is right
- Actuator-level sensing supplies the data needed for safe and adaptive closed-loop control.
- The system can differentiate materials by stiffness during contact.
- Distinct sensor signatures appear for different grasping tasks.
- The modular construction supports scaling to multi-finger or full-hand assistive devices.
Where Pith is reading between the lines
- Embedding both actuation and sensing in the same soft structure could reduce the size and weight of future wearable robots.
- Untethered operation opens the possibility of daily-use devices for home rehabilitation without external hardware.
- The proof-of-concept design may be adapted to other joints where similar soft sensing is needed.
Load-bearing premise
The compact motor, microcontroller, and custom sensors maintain reliable operation in a fully untethered setup without external power, computation, or frequent recalibration.
What would settle it
A trial in which MagSense or StretchSense readings cease to correlate reliably with measured finger pose or object stiffness after several hours of continuous untethered use.
Figures
read the original abstract
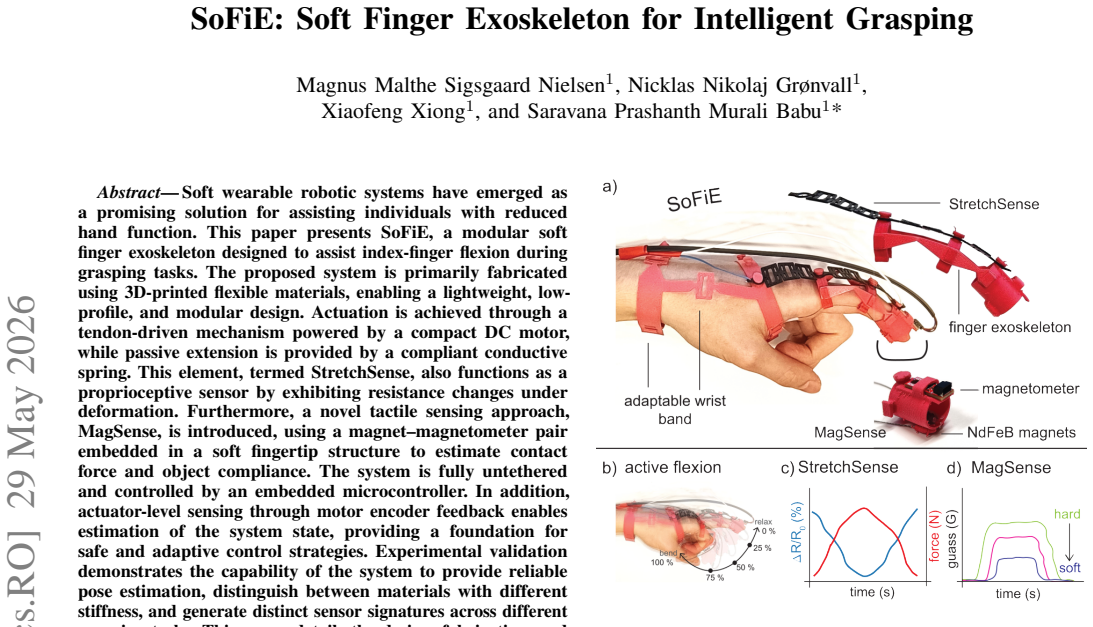
Soft wearable robotic systems have emerged as a promising solution for assisting individuals with reduced hand function. This paper presents SoFiE, a modular soft finger exoskeleton designed to assist index-finger flexion during grasping tasks. The proposed system is primarily fabricated using 3D-printed flexible materials, enabling a lightweight, low-profile, and modular design. Actuation is achieved through a tendon-driven mechanism powered by a compact DC motor, while passive extension is provided by a compliant conductive spring. This element, termed StretchSense, also functions as a proprioceptive sensor by exhibiting resistance changes under deformation. Furthermore, a novel tactile sensing approach, MagSense, is introduced, using a magnet and magnetometer pair embedded in a soft fingertip structure to estimate contact force and object compliance. The system is fully untethered and controlled by an embedded microcontroller. In addition, actuator-level sensing through motor encoder feedback enables estimation of the system state, providing a foundation for safe and adaptive control strategies. Experimental validation demonstrates the capability of the system to provide reliable pose estimation, distinguish between materials with different stiffness, and generate distinct sensor signatures across different grasping tasks. This paper details the design, fabrication, and sensing concepts of the proposed exoskeleton as a proof of concept toward modular, soft, and assistive wearable robotics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents SoFiE, a modular soft finger exoskeleton for index-finger flexion assistance during grasping. Fabricated primarily via 3D-printed flexible materials, the system uses tendon-driven actuation powered by a compact DC motor with passive extension from a compliant conductive spring (StretchSense) that also serves as a proprioceptive sensor via resistance changes. A novel MagSense tactile sensor (magnet-magnetometer pair in a soft fingertip) estimates contact force and object compliance. The device is fully untethered with embedded microcontroller control and motor-encoder feedback for state estimation. The central claim is that basic experimental validation demonstrates reliable pose estimation, distinction between materials of differing stiffness, and distinct sensor signatures across grasping tasks, offered as a proof-of-concept for soft assistive wearable robotics.
Significance. If the demonstrations are placed on a quantitative footing, the work would advance soft wearable robotics by showing successful integration of multi-modal sensing (proprioceptive resistance, magnetometer-based contact, and encoder) with tendon actuation in a lightweight, modular, fully untethered package. The dual-use StretchSense element and the MagSense approach constitute concrete technical contributions that could support adaptive control strategies. Credit is given for the untethered implementation and the modular 3D-printed fabrication route.
major comments (2)
- [Abstract] Abstract: the central claim that 'experimental validation demonstrates the capability of the system to provide reliable pose estimation, distinguish between materials with different stiffness, and generate distinct sensor signatures' is unsupported by any reported quantitative metrics (RMSE, classification accuracy, statistical tests, or calibration procedures), rendering the strength of the experimental contribution impossible to assess.
- [Abstract] Abstract, final paragraph: the assertion of reliable untethered operation of the compact DC motor, embedded microcontroller, and custom sensors without external power or frequent recalibration is presented without supporting data on power consumption, battery endurance, thermal behavior, or drift, which is load-bearing for the claimed practicality of the system.
minor comments (1)
- The manuscript would benefit from explicit diagrams or equations defining the resistance-to-angle mapping for StretchSense and the magnetometer-to-force mapping for MagSense to improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive suggestions regarding the abstract. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'experimental validation demonstrates the capability of the system to provide reliable pose estimation, distinguish between materials with different stiffness, and generate distinct sensor signatures' is unsupported by any reported quantitative metrics (RMSE, classification accuracy, statistical tests, or calibration procedures), rendering the strength of the experimental contribution impossible to assess.
Authors: We agree that the abstract would benefit from explicit quantitative metrics to support the stated claims. The body of the manuscript reports experimental results on resistance-based pose estimation via StretchSense, material stiffness distinction via MagSense, and distinct sensor patterns across tasks, but these are presented without aggregated statistics such as RMSE or accuracy values in the abstract itself. We will revise the abstract to incorporate specific quantitative results (e.g., RMSE for pose estimation and classification performance for stiffness distinction) drawn from the experimental sections. revision: yes
-
Referee: [Abstract] Abstract, final paragraph: the assertion of reliable untethered operation of the compact DC motor, embedded microcontroller, and custom sensors without external power or frequent recalibration is presented without supporting data on power consumption, battery endurance, thermal behavior, or drift, which is load-bearing for the claimed practicality of the system.
Authors: We acknowledge that the abstract asserts reliable untethered operation without accompanying quantitative data on power consumption, battery endurance, thermal behavior, or sensor drift. The manuscript describes the fully untethered hardware implementation but does not include these specific measurements. As this is presented as a proof-of-concept, we will add a dedicated subsection or table reporting power consumption, estimated battery life under typical grasping loads, and any observed drift in the revised manuscript to substantiate the practicality claims. revision: yes
Circularity Check
No significant circularity
full rationale
The paper is a hardware design and fabrication report describing a modular soft finger exoskeleton, its tendon-driven actuation, StretchSense and MagSense sensing elements, and basic experimental demonstrations of pose estimation and material distinction. No equations, derivations, fitted parameters, or predictive models are present in the abstract or described content; all claims reduce to physical construction and direct observation rather than any self-referential chain.
Axiom & Free-Parameter Ledger
invented entities (2)
-
StretchSense
no independent evidence
-
MagSense
no independent evidence
Forward citations
Cited by 1 Pith paper
-
SoftPINCH: EMG-Driven Soft Exoskeleton Assistance for Finger Flexion and Grasping
SoftPINCH is an EMG-driven soft exoskeleton using CNN+LSTM decoding and magnetic fingertip sensing that achieves 99.4% cross-subject accuracy and reduces muscular effort during pinch grasping.
Reference graph
Works this paper leans on
-
[1]
The relationship between hand grip and pinch strengths and disease activity, articular damage, pain, and disability in patients with rheumatoid arthritis,
M. Dedeoglu, Ü. Gafuroglu, Ö. Yilmaz, and H. Bodur, “The relationship between hand grip and pinch strengths and disease activity, articular damage, pain, and disability in patients with rheumatoid arthritis,”Archives of Rheumatology, vol. 28, pp. 69–77, 2013
2013
-
[2]
Rheumatoid arthritis: Hand function, activities of daily living, grip strength and essential assistive de- vices,
I. Sipham and S. J. Pitout, “Rheumatoid arthritis: Hand function, activities of daily living, grip strength and essential assistive de- vices,”Curationis, vol. 26, pp. 98–106, 2003.DOI: 10 . 4102 / curationis.v26i3.857
2003
-
[3]
Relation between handgrip strength and quality of life in patients with arthritis in korea: The korea national health and nutrition examination survey, 2015-2018,
S.-Y . Chang, B.-D. Han, K.-D. Han, H.-J. Park, and S. Kang, “Relation between handgrip strength and quality of life in patients with arthritis in korea: The korea national health and nutrition examination survey, 2015-2018,”Medicina (Kaunas), vol. 58:172, 2022.DOI: 10.3390/ medicina58020172
2015
-
[4]
Assessing health-related quality of life in hand osteoarthritis: A literature review,
M. Michon, E. Maheu, and F. Berenbaum, “Assessing health-related quality of life in hand osteoarthritis: A literature review,”Annals of the rheumatic diseases, vol. 70, pp. 921–928, 2011.DOI: 10.1136/ ard.2010.131151
arXiv 2011
-
[5]
S. Mathieu, F. Fayet, M. -H. Salembien, M. Rodere, M. Soubrier, and A. Tournadre, “Grip strength impairment and neuropathic-like pain as determinants of function and quality of life in hand osteoarthritis,” Open acces rheumatoogy: research and reviews, vol. 17, pp. 47–56, 2025.DOI:10.2147/OARRR.S512888
-
[6]
2018 update of the eular recommendations for the management of hand osteoarthritis,
M. Kloppenburg et al., “2018 update of the eular recommendations for the management of hand osteoarthritis,”Annals of the rheumatic diseases, vol. 78, pp. 16–24, 2019.DOI: 10.1136/annrheumdis- 2018-213826
-
[7]
A survey on robotic devices for upper limb rehabilitation,
P. aciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy, and S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” Journal of neuroengineering and rehabilitation, vol. 11, 2014.DOI: 10.1186/1743-0003-11-3
-
[9]
Moving toward soft robotics: A decade review of the design of hand exoskeletons,
T. Shahid, D. Gouwanda, S. G. Nurzaman, and A. A. Gopalai, “Moving toward soft robotics: A decade review of the design of hand exoskeletons,”Biomimetics, vol. 3, 2018.DOI: 10 . 3390 / biomimetics3030017
2018
-
[10]
Soft wearable robots: Development status and technical challenges,
Y . Shi, W. Dong, W. Lin, and Y . Gao, “Soft wearable robots: Development status and technical challenges,”Sensors, vol. 22, 2022. DOI:10.3390/s22197584
-
[11]
Soft robotic glove for combined assistance and at-home rehabilitation,
P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, and C. J. Walsh, “Soft robotic glove for combined assistance and at-home rehabilitation,” Robotics and Autonomous Systems, vol. 73, pp. 135–143, 2015.DOI: 10.1016/j.robot.2014.08.014
-
[12]
H. K. Yap et al., “A fully fabric-based bidirectional soft robotic glove for assistance and rehabilitation of hand impaired patients,”IEEE Robotics and Automation Letters, vol. 2, no. 3, pp. 1383–1390, 2017. DOI:10.1109/LRA.2017.2669366
-
[13]
Assisting hand function after spinal cord injury with a fabric-based soft robotic glove,
L. Cappello et al., “Assisting hand function after spinal cord injury with a fabric-based soft robotic glove,”Journal of neuroengineering and rehabilitation, vol. 15, 2018.DOI: 10.1186/s12984-018- 0391-x
-
[14]
Exo-glove: A wearable robot for the hand with a soft tendon routing system,
H. In, B. B. Kang, M. Sin, and K. -J. Cho, “Exo-glove: A wearable robot for the hand with a soft tendon routing system,”IEEE Robotics and Automation Magazine, vol. 22, no. 1, pp. 97–105, 2015.DOI: 10.1109/MRA.2014.2362863
-
[15]
B. B. Kang, H. Choi, H. Lee, and K. J. Cho, “Exo-glove poly ii: A polymer-based soft wearable robot for the hand with a tendon-driven actuation system,”Soft robotics, vol. 6, pp. 214–227, 2019.DOI: 10.1089/soro.2018.0006
-
[16]
A soft tactile sensor based on magnetics and hybrid flexible- rigid electronics,
M. Neto, P. Ribeiro, R. Nunes, L. Jamone, A. Bernardino, and S. Cardoso, “A soft tactile sensor based on magnetics and hybrid flexible- rigid electronics,”Sensors, vol. 21, no. 15, 2021,ISSN: 1424-8220. DOI: 10.3390/s21155098 [Online]. Available: https://www. mdpi.com/1424-8220/21/15/5098
-
[17]
Y . M. Zhou, D. Wagner, K. Nuckols, R. Heimgartner, C. Correia, and M. Clarke, “Soft robotic glove with integrated sensing for intuitive grasping assistance post spinal cord injury,”2019 International Conference on Robotics and Automation (ICRA), 2019.DOI: 10 . 1109/ICRA.2019.8794367
arXiv 2019
-
[18]
C. Thalman and P. Artemiadis, “A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications,”Wearable Technologies, vol. 1, 2020. DOI:10.1017/wtc.2020.4
-
[19]
A. Mohammadi, J. Lavranos, P. Choong, and D. Oetomo, “Flexo- glove: A 3d printed soft exoskeleton robotic glove for impaired hand rehabilitation and assistance,”Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society. Annual International Conference, pp. 2120–2123, 2018.DOI:...
-
[20]
Development of 3d-printed myoelectric hand orthosis for patients with spinal cord injury,
H. J. Yoo, S. Lee, J. Kim, C. Park, and B. Lee, “Development of 3d-printed myoelectric hand orthosis for patients with spinal cord injury,”Journal of neuroengineering and rehabilitation, vol. 16, 2019. DOI:10.1186/s12984-019-0633-6
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.