FlatVPR: Plug-and-play Geo-linear Residual Adapter for Geometric Rectification of Foundation Model Feature Manifolds
Pith reviewed 2026-06-28 15:48 UTC · model grok-4.3
The pith
A residual adapter can flatten the curved feature manifold of foundation models so linear interpolation reconstructs any point between sparse visual place anchors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By training a residual adapter on foundation features with the Pullback Flatness Loss, the resulting manifold satisfies the property that any descriptor between two anchors is recovered accurately by the linear combination (1-t)z_A + t z_B for t in [0,1], which in turn permits an Expectation-Maximization procedure to build lightweight maps that remain effective at large anchor spacing.
What carries the argument
The geo-linear residual adapter Res(·) together with the Pullback Flatness Loss that penalizes deviation of points along the physical path from the straight line segment joining adjacent anchors.
If this is right
- Reconstruction of pseudo-descriptors at arbitrary positions between anchors becomes possible with only the two endpoint features.
- Map construction decouples into a continuous M-step that adapts the manifold and an E-step that selects optimal anchors.
- Localization accuracy improves under 100 m anchor spacing and seasonal variation on the NCLT dataset.
- The adapter attaches directly to existing foundation models without retraining the base network.
Where Pith is reading between the lines
- The same flattening loss could be tested on other sequence-based recognition tasks where physical paths should map to straight lines in feature space.
- If the manifold truly becomes flat, anchor spacing limits might be derived from the remaining curvature rather than from empirical density requirements.
- Applying the adapter to different foundation models would reveal whether curvature is a general property or specific to DINOv2.
Load-bearing premise
A residual correction exists that can make the feature manifold flat enough for linear interpolation between anchors to match actual intermediate descriptors.
What would settle it
Measure the average reconstruction error of held-out intermediate descriptors using the linear formula after adapter training; if the error remains comparable to the unadapted model, the central claim does not hold.
Figures
read the original abstract
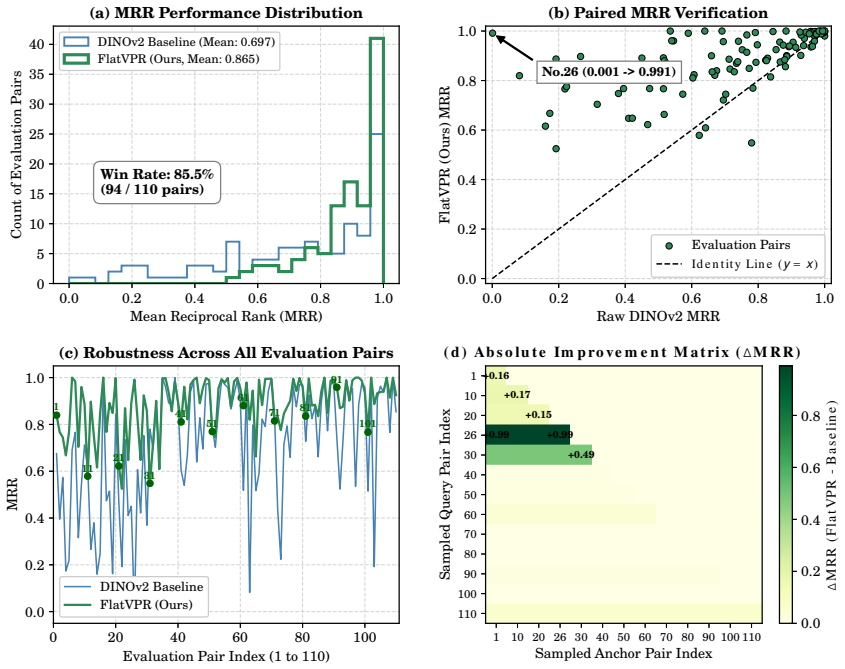
This paper proposes ``FlatVPR,'' a novel geometric rectification paradigm that effectively bridges the trade-off between map lightweightness and localization accuracy in visual place recognition (VPR) by enforcing a feature manifold structure where any descriptor between two adjacent anchors $\mathbf{z}_A$ and $\mathbf{z}_B$ can be accurately reconstructed via linear interpolation $\hat{\mathbf{z}}_{pseudo} = (1-t)\mathbf{z}_A + t\mathbf{z}_B$, where $t \in [0,1]$ denotes the relative position. While state-of-the-art foundation models such as DINOv2-ViT-S/14 provide robust semantic features, their latent manifolds exhibit prominent curvature, projecting uniform linear motion in physical space onto highly non-linear trajectories in the feature space, which hinders reliable reconstruction under sparse anchor conditions. To enable the aforementioned interpolation-based reconstruction, we introduce a residual transformation $\hat{\mathbf{z}} = \mathbf{z} + \text{Res}(\mathbf{z})$ to the raw foundation features $\mathbf{z}$, where $\text{Res}(\cdot)$ represents a learnable adapter. Our method explicitly suppresses manifold curvature using a mathematically grounded Pullback Flatness Loss that minimizes the deviation of intermediate features from the linear segment connecting adjacent anchors, thereby minimizing the intrinsic curvature of the manifold. Through this spatial flattening, map construction is formulated within an Expectation-Maximization (EM) framework, decoupled into a continuous M-step for manifold adaptation and a conceptual E-step for optimal anchor selection guidelines. Experiments on the NCLT dataset demonstrate that the application of our adapter leads to significant performance improvements even under extremely sparse anchor conditions with 100m intervals and extreme seasonal changes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes FlatVPR, a plug-and-play residual adapter Res(·) applied to foundation model features (e.g. DINOv2) for visual place recognition. It introduces a Pullback Flatness Loss to suppress manifold curvature so that any intermediate descriptor can be reconstructed by linear interpolation between adapted anchors, enabling an EM framework for map construction with sparse anchors; experiments on NCLT are claimed to show significant gains even at 100 m intervals under extreme seasonal changes.
Significance. If the central claim holds with proper evidence, the approach could meaningfully reduce required anchor density in VPR maps while preserving accuracy, addressing a practical trade-off for foundation-model-based systems. The plug-and-play design and explicit geometric loss are strengths if they demonstrably generalize beyond the training distribution.
major comments (3)
- [Method (Pullback Flatness Loss and reconstruction formula)] The Pullback Flatness Loss is defined precisely to minimize deviation of adapted intermediate features from the linear segment connecting anchors (the exact property required by the reconstruction formula ĥz_pseudo = (1-t)z_A + t z_B). This renders the 'flattening' achievement tautological by construction rather than an independent empirical outcome (method section describing the loss and reconstruction formula).
- [Abstract and Experiments] The abstract asserts 'significant performance improvements' on NCLT under 100 m anchor intervals and extreme seasonal changes, yet supplies no quantitative metrics, baseline comparisons, ablation results, or loss implementation details. Without these, the central empirical claim cannot be evaluated (Experiments section).
- [Experiments (NCLT seasonal changes)] The reconstruction and EM map-construction procedures require that the learned Res(·) continues to suppress curvature on unseen seasonal data, but the loss is applied only on the training distribution (dense sequences from one set of conditions). No test is reported showing that ||(1-t)(z_A + Res(z_A)) + t(z_B + Res(z_B)) - (z_inter + Res(z_inter))|| remains small on held-out seasonal shifts, which is load-bearing for attributing gains to geometric rectification (Experiments on NCLT seasonal changes).
minor comments (2)
- [Abstract] Notation for the adapted feature is introduced as ĥz = z + Res(z) but the reconstruction formula uses ĥz_pseudo; a single consistent symbol for the adapted manifold would improve clarity.
- [Method (EM framework)] The EM framework is described at a high level ('continuous M-step for manifold adaptation and conceptual E-step for optimal anchor selection') without specifying how the adapter parameters are updated or how anchor selection interacts with the loss; a short equation or pseudocode would help.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We respond point-by-point to the major comments below, indicating where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Method (Pullback Flatness Loss and reconstruction formula)] The Pullback Flatness Loss is defined precisely to minimize deviation of adapted intermediate features from the linear segment connecting anchors (the exact property required by the reconstruction formula ĥz_pseudo = (1-t)z_A + t z_B). This renders the 'flattening' achievement tautological by construction rather than an independent empirical outcome (method section describing the loss and reconstruction formula).
Authors: We agree that the Pullback Flatness Loss is explicitly constructed to enforce the linear interpolation property used in the reconstruction formula. This is by design: the loss provides the optimization objective that enables the desired manifold property. The empirical contribution of the work lies in demonstrating that a lightweight, plug-and-play residual adapter can be trained under this loss to yield measurable VPR gains within the EM map-construction framework. We will revise the method section to state this distinction clearly and to emphasize that the novelty resides in the adapter architecture and its integration with the EM procedure rather than in an independent empirical discovery of flatness. revision: yes
-
Referee: [Abstract and Experiments] The abstract asserts 'significant performance improvements' on NCLT under 100 m anchor intervals and extreme seasonal changes, yet supplies no quantitative metrics, baseline comparisons, ablation results, or loss implementation details. Without these, the central empirical claim cannot be evaluated (Experiments section).
Authors: We accept that the abstract would be strengthened by the inclusion of concrete metrics. In the revised manuscript we will update the abstract to report specific recall figures (e.g., recall@1 at 100 m spacing versus raw DINOv2 and other baselines) and will ensure the experiments section supplies the requested baseline comparisons, ablation studies, and loss implementation details. revision: yes
-
Referee: [Experiments (NCLT seasonal changes)] The reconstruction and EM map-construction procedures require that the learned Res(·) continues to suppress curvature on unseen seasonal data, but the loss is applied only on the training distribution (dense sequences from one set of conditions). No test is reported showing that ||(1-t)(z_A + Res(z_A)) + t(z_B + Res(z_B)) - (z_inter + Res(z_inter))|| remains small on held-out seasonal shifts, which is load-bearing for attributing gains to geometric rectification (Experiments on NCLT seasonal changes).
Authors: The reported VPR improvements on NCLT sequences exhibiting extreme seasonal variation (unseen during adapter training) provide indirect evidence that the rectification generalizes. Nevertheless, we concur that a direct measurement of the interpolation error on held-out seasonal data would more rigorously support attribution to geometric rectification. We will add this evaluation to the revised experiments section. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper defines a residual adapter trained via Pullback Flatness Loss to minimize deviation of intermediate descriptors from linear interpolation between anchors. This is a standard training objective that targets the geometric property required for the reconstruction formula and EM procedure. The central performance claims, however, rest on external VPR accuracy metrics evaluated on the NCLT dataset (including sparse 100 m anchors and seasonal variation), which are independent of the loss value. No equation or claim reduces a reported prediction or first-principles result to its own inputs by construction, nor does any load-bearing step rely on self-citation. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- parameters of Res(·)
axioms (1)
- domain assumption After the residual transform, linear interpolation in feature space accurately reconstructs descriptors at intermediate physical positions.
invented entities (1)
-
Res(·) residual adapter
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Deep visual place recognition: A survey
Gabriele Berton, Carlo Masone, and Barbara Caputo. Deep visual place recognition: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) , 45(11):13512–13532, 2023
2023
-
[2]
Cesar Cadena, Luca Carlone, Henry Carrillo, Y asir Latif , Davide Scara- muzza, Jos´ e Neira, Ian Reid, and Ryan M. Eustice. Past, pres ent, and future of simultaneous localization and mapping: Toward th e robust- perception age. IEEE Transactions on Robotics (T-RO) , 32(6):1309– 1332, 2016
2016
-
[3]
Maxime Oquab, Timoth´ ee Darcet, Th´ eo Moutakanni, Huy V. V o, Marc Szafraniec, V asil Khalidov, Pierre Fernandez, Daniel Hazi za, Francisco Massa, Alaaeldin El-Nouby, Mahmoud Assran, Nicolas Ballas , Woj- ciech Galuba, Russell Howes, Po-Y ao Huang, Shang-Wen Li, Is han Misra, Michael Rabbat, V asu Sharma, Gabriel Synnaeve, Hu Xu , Herv´ e J´ egou, Julie...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[4]
Patch-NetVLAD: Multi-scale fusion of local-glob al features for place recognition
Stephen Hausler, Sourav Garg, Ming Xu, Michael Milford, and Tobias Fischer. Patch-NetVLAD: Multi-scale fusion of local-glob al features for place recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , pages 14141–14152, 2021
2021
-
[5]
NetVLAD: CNN architecture for weakly supervis ed place recognition
Relja Arandjelovi´ c, Petr Gronat, Akihiko Torii, Tomas Pajdla, and Josef Sivic. NetVLAD: CNN architecture for weakly supervis ed place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , pages 5297–5307, 2016
2016
-
[6]
Y aron Lipman, Ricky T. Q. Chen, Heli Ben-Hamu, Maximilia n Nickel, and Matt Le. Flow matching for generative modeling. In International Conference on Learning Representations (ICLR) , 2023
2023
-
[7]
Ushani, and Ryan M
Nicholas Carlevaris-Bianco, Arash K. Ushani, and Ryan M . Eustice. University of Michigan N campus Long-Term Vision and LiDAR dataset. The International Journal of Robotics Research (IJRR) , 35(9):1023–1035, 2015
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.