Nonlocal Mean Field Schr\"{o}dinger Bridge with Learned Interactions
Pith reviewed 2026-06-28 08:31 UTC · model grok-4.3
The pith
Neural network surrogates turn the quadratic-cost mean-field Schrödinger bridge into a linear-cost algorithm.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
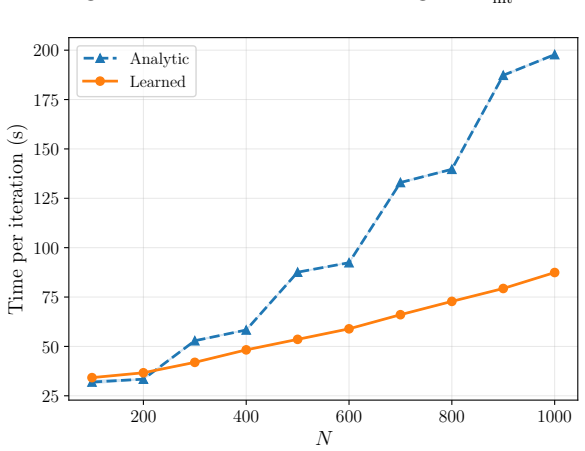
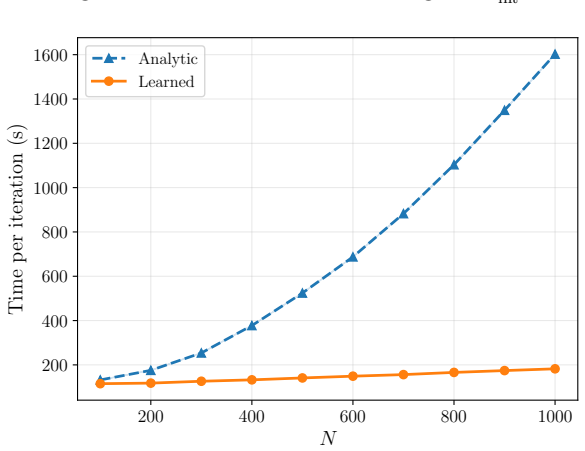
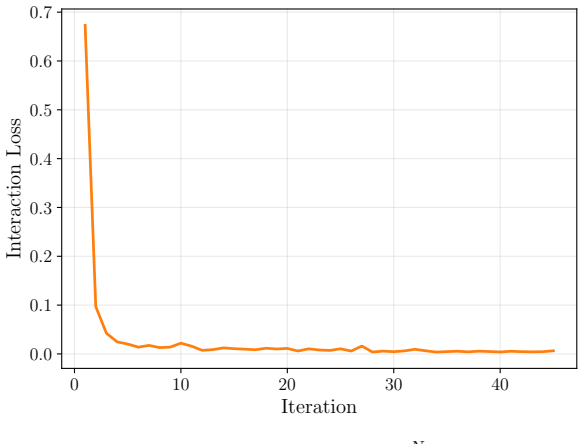
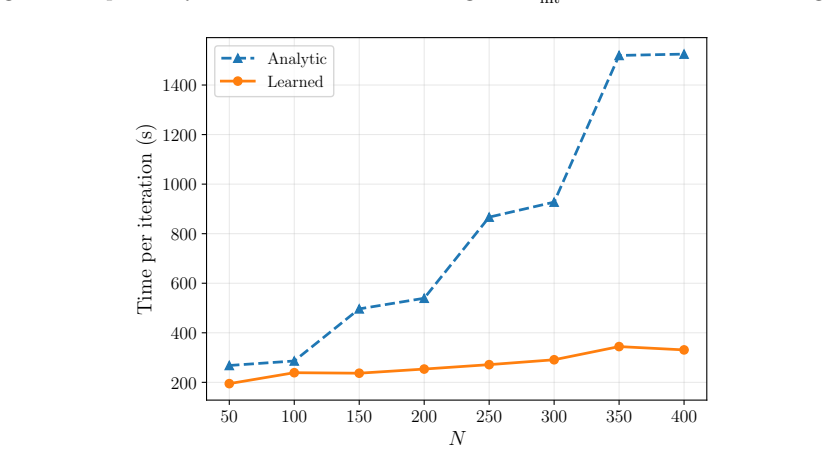
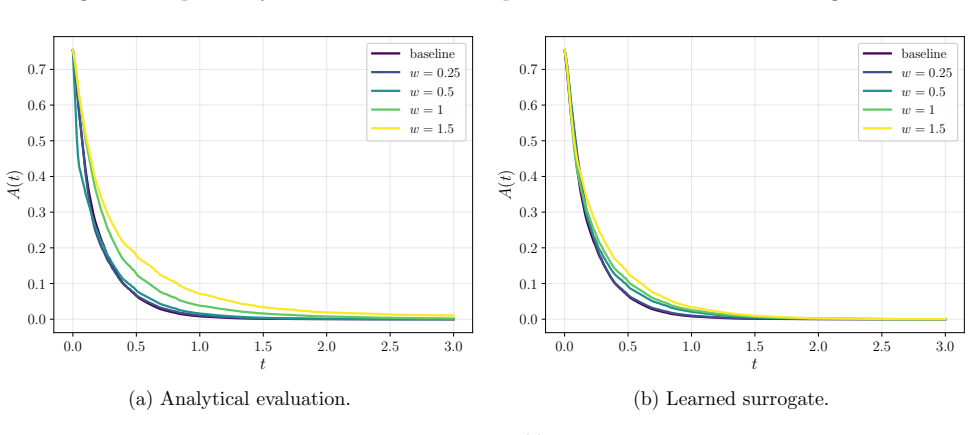
By training neural networks to stand in for the nonlocal interaction functionals inside the mean-field Schrödinger bridge, the authors obtain an alternating optimization procedure whose per-step cost scales linearly rather than quadratically with population size; Grönwall-type estimates then bound the distance between the surrogate trajectories and the exact mean-field solution, and numerical tests on navigation and opinion dynamics reproduce the exact trajectories while shortening training time.
What carries the argument
The four-stage alternating algorithm that interleaves control optimization, neural-network surrogate updates for the nonlocal terms, and particle propagation.
If this is right
- Per-step computational cost at inference drops from quadratic to linear in population size.
- Grönwall-type bounds quantify the propagation of surrogate error into the final trajectories.
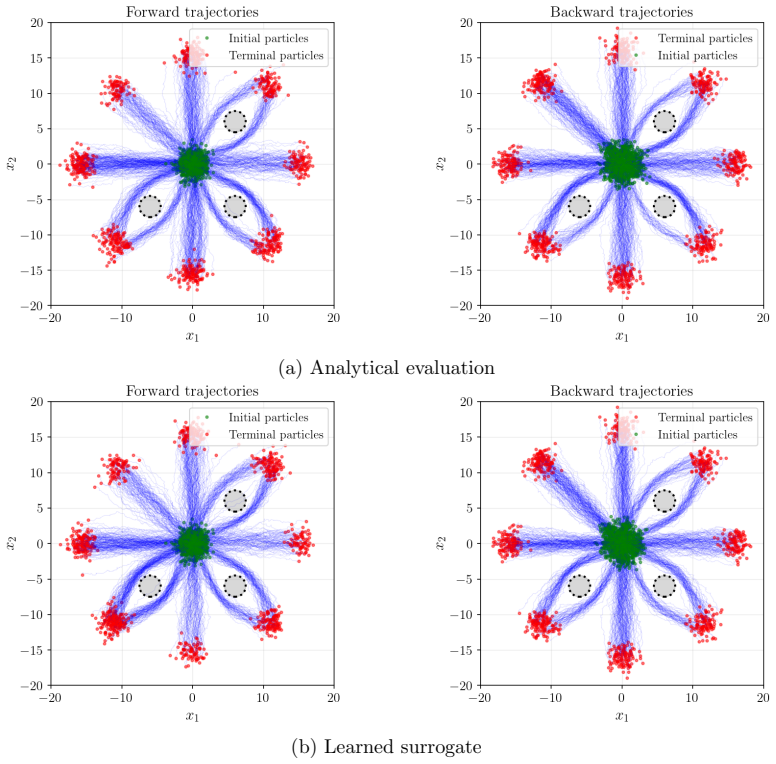
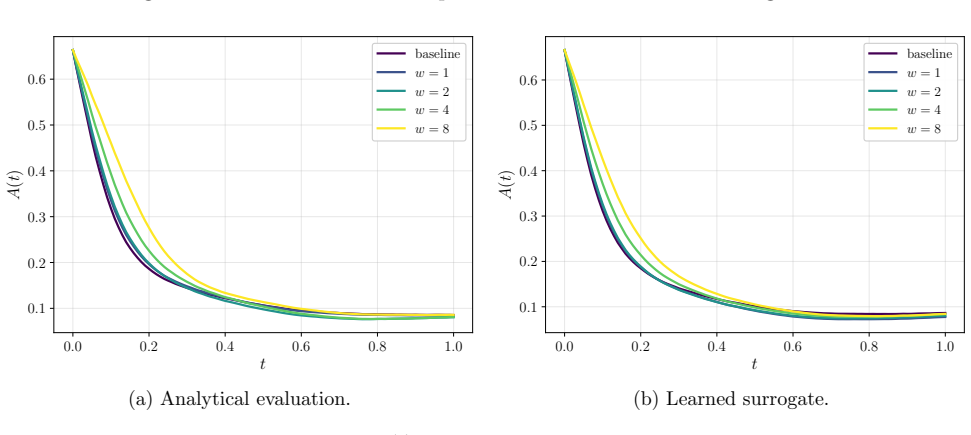
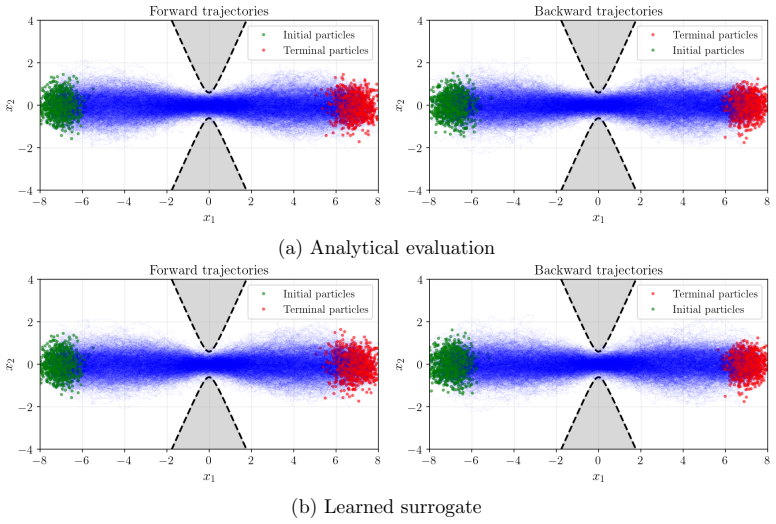
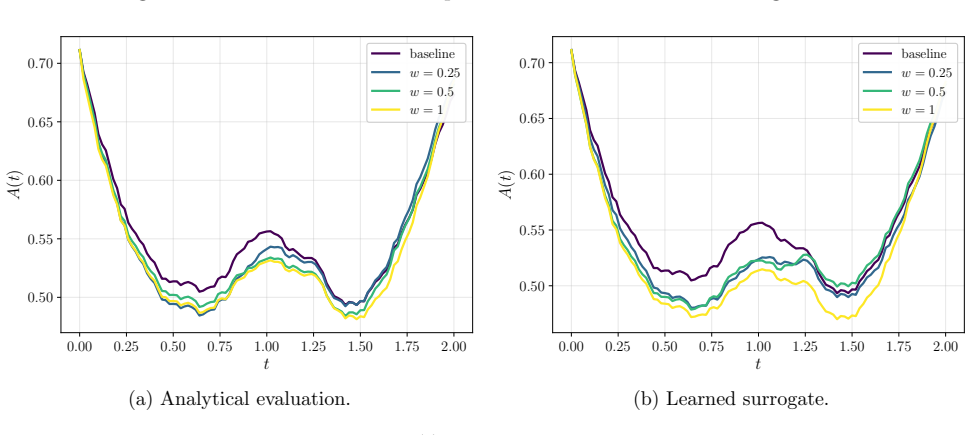
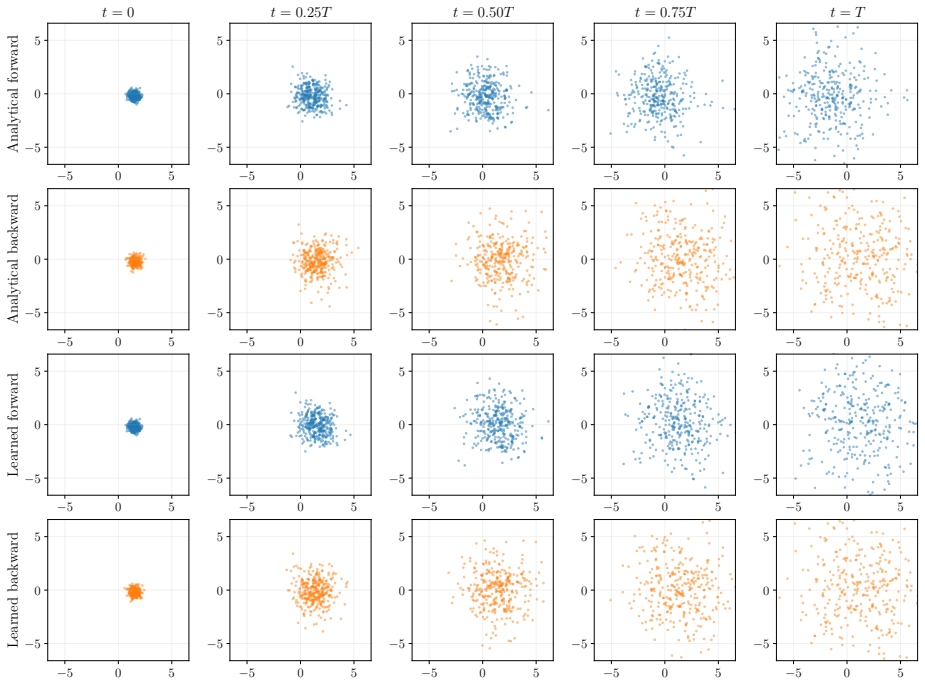
- The method reproduces trajectories obtained by exact evaluation on navigation and opinion-dynamics tasks.
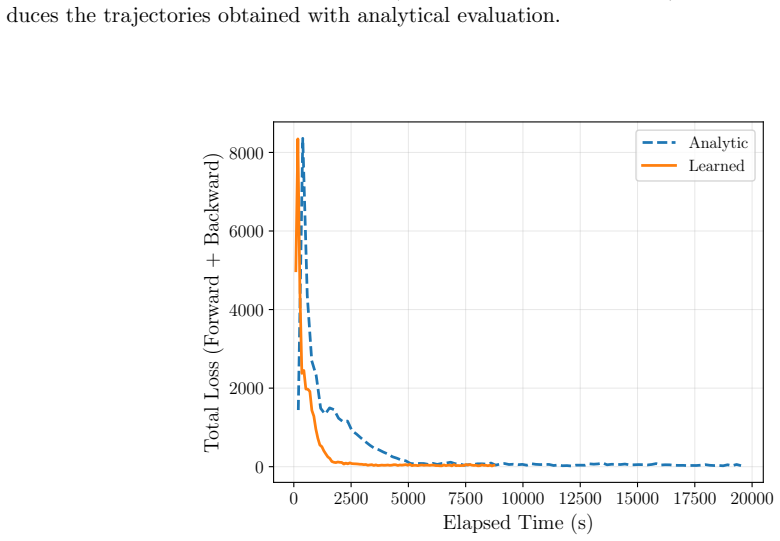
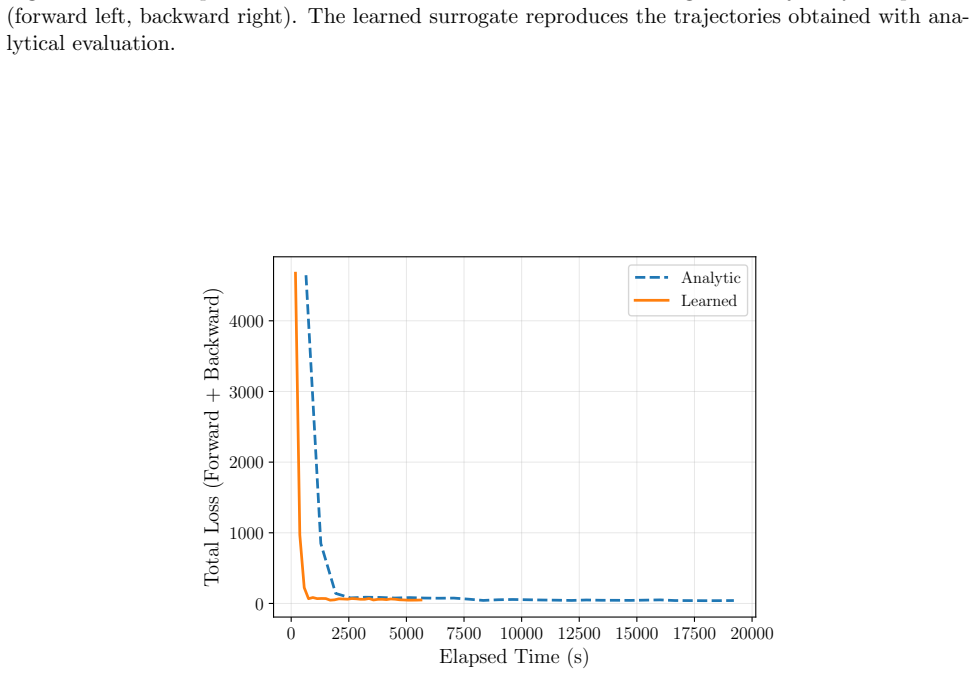
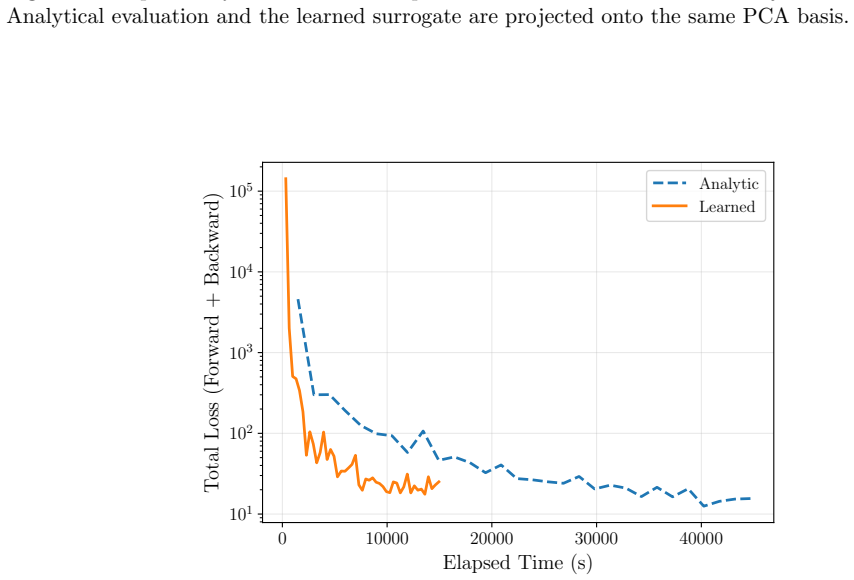
- Overall training time is reduced compared with direct evaluation of the nonlocal terms.
Where Pith is reading between the lines
- The same surrogate strategy could be applied to other mean-field control problems whose interaction terms are currently too expensive to evaluate directly.
- The stability bounds supply a practical certificate that could be checked after training to decide whether a given surrogate is usable for a target population size.
- Because the cost reduction is achieved at inference, the approach opens the door to real-time sampling or control of very large interacting particle systems once the networks are trained.
Load-bearing premise
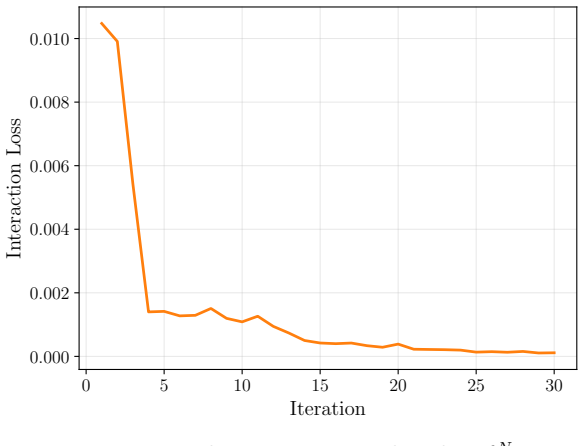
The neural network surrogates can be trained to approximate the nonlocal interaction functionals with enough accuracy that the generated trajectories remain close to the exact mean-field solution.
What would settle it
Run the navigation or opinion-dynamics experiments with the learned surrogates and measure whether the produced trajectories deviate from the analytically evaluated ones by more than the amount allowed by the derived Grönwall bounds.
Figures
read the original abstract
The Schr\"odinger Bridge Problem constructs a stochastic process that connects an initial distribution to a terminal distribution with minimum energy. This work considers its mean-field extension, the Mean-Field Schr\"odinger Bridge, for interacting particle systems. With nonlocal interactions, evaluating the resulting particle-dependent distributional terms can scale quadratically with the population size, which makes large-scale problems intractable. We address this bottleneck by approximating the nonlocal interactions with neural network surrogates. The resulting four-stage alternating algorithm reduces the per-step cost from quadratic to linear in the population size at inference. We also derive Gr\"onwall-type stability bounds that show how surrogate errors propagate to the generated trajectories. In numerical experiments on navigation and opinion-dynamics tasks, the proposed method reproduces trajectories obtained with analytical evaluation and reduces training time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends the mean-field Schrödinger bridge problem to interacting particle systems with nonlocal interactions. It approximates the nonlocal terms via neural-network surrogates, yielding a four-stage alternating algorithm whose per-step inference cost scales linearly rather than quadratically with population size. Gronwall-type stability bounds are derived to control propagation of surrogate approximation error into the generated trajectories. Numerical experiments on navigation and opinion-dynamics tasks report that the method reproduces trajectories obtained by exact analytical evaluation while also reducing training time.
Significance. If the derived Gronwall bounds are non-vacuous and the learned surrogates achieve the accuracy needed for trajectory fidelity, the work removes a central computational obstacle in large-scale mean-field optimal transport and control. The combination of complexity reduction, explicit stability analysis, and empirical validation against exact solutions would make previously intractable nonlocal mean-field problems accessible, with direct relevance to multi-agent systems and statistical physics.
major comments (2)
- [§4.2] §4.2, Algorithm 1 and the surrounding text: the four-stage alternation is presented as converging to the mean-field bridge, yet no contraction mapping or monotonicity argument is supplied for the coupled updates of the forward/backward processes and the surrogate parameters; without this, the claim that the algorithm solves the original problem rests on empirical observation alone.
- [§5.3] §5.3, the Gronwall bound (presumably Eq. (12) or (13)): the derivation assumes the surrogate error is bounded uniformly in time and independent of the particle measure, but the training procedure (described in §4.3) updates the network on samples drawn from the current iterate of the measure; this dependence is not folded into the error-propagation estimate, so the bound may not directly control the closed-loop trajectory error.
minor comments (2)
- [§5.1] The abstract and §5.1 state that training time is reduced, yet no wall-clock timings, iteration counts, or hardware specifications are supplied to quantify the improvement relative to the quadratic baseline.
- Notation for the nonlocal interaction kernel K and its neural surrogate K_θ is introduced without an explicit statement of the function space in which the approximation error is measured (e.g., L^∞ or Wasserstein).
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [§4.2] §4.2, Algorithm 1 and the surrounding text: the four-stage alternation is presented as converging to the mean-field bridge, yet no contraction mapping or monotonicity argument is supplied for the coupled updates of the forward/backward processes and the surrogate parameters; without this, the claim that the algorithm solves the original problem rests on empirical observation alone.
Authors: We agree that no contraction mapping or monotonicity argument is supplied for convergence of the four-stage alternation. The algorithm is constructed by alternating between the forward and backward processes and the surrogate updates, following the structure of the mean-field Schrödinger bridge; its ability to recover the correct trajectories is shown empirically on the navigation and opinion-dynamics examples. In revision we will add an explicit statement that global convergence is observed numerically rather than proven theoretically and list this as an open direction. revision: partial
-
Referee: [§5.3] §5.3, the Gronwall bound (presumably Eq. (12) or (13)): the derivation assumes the surrogate error is bounded uniformly in time and independent of the particle measure, but the training procedure (described in §4.3) updates the network on samples drawn from the current iterate of the measure; this dependence is not folded into the error-propagation estimate, so the bound may not directly control the closed-loop trajectory error.
Authors: The Gronwall bounds are derived under the standing assumption that the surrogate error remains uniformly bounded in time. The online training procedure does draw samples from the current measure iterate, so the error bound is not shown to be preserved in closed loop. We will revise §5.3 to state the assumption more precisely and to note that a fully coupled analysis of the training-measure interaction lies beyond the present stability estimate. revision: partial
Circularity Check
No significant circularity
full rationale
The derivation introduces neural network surrogates to approximate nonlocal interaction terms, yielding an alternating four-stage algorithm whose per-step cost scales linearly rather than quadratically with population size. Separate Grönwall-type bounds are derived to bound surrogate error propagation into trajectories; these bounds rest on standard differential inequality techniques and do not presuppose the learned surrogates. Experiments compare generated trajectories against analytically evaluable cases, providing an external check. No equation reduces a claimed prediction to a fitted quantity by construction, no uniqueness result is imported via self-citation, and no ansatz is smuggled through prior work. The central claims therefore remain independent of their own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network parameters
axioms (1)
- domain assumption The mean-field limit holds and the nonlocal interaction functional admits a neural approximation with controllable error.
Reference graph
Works this paper leans on
-
[1]
E. Schr¨ odinger, ¨ uber die Umkehrung der Naturgesetze, Angewandte Chemie 44 (30) (1931) 636– 636.doi:10.1002/ange.19310443014
-
[2]
C. L´ eonard, A survey of the Schr¨ odinger problem and some of its connections with optimal transport, Discrete and Continuous Dynamical Systems 34 (4) (2014) 1533–1574.doi:10.3934/ dcds.2014.34.1533
2014
-
[3]
Y. Chen, T. T. Georgiou, M. Pavon, Stochastic Control Liaisons: Richard Sinkhorn Meets Gas- pard Monge on a Schr¨ odinger Bridge, SIAM Review 63 (2) (2021) 249–313.doi:10.1137/ 20M1339982
2021
-
[4]
Y. Chen, T. T. Georgiou, M. Pavon, Optimal Steering of a Linear Stochastic System to a Final Probability Distribution, Part I, IEEE Transactions on Automatic Control 61 (5) (2016) 1158– 1169.doi:10.1109/TAC.2015.2457784
-
[5]
Y. Chen, T. T. Georgiou, M. Pavon, Optimal Steering of a Linear Stochastic System to a Final Probability Distribution, Part II, IEEE Transactions on Automatic Control 61 (5) (2016) 1170– 1180.doi:10.1109/TAC.2015.2457791
-
[6]
Y. Chen, T. T. Georgiou, M. Pavon, Optimal Steering of a Linear Stochastic System to a Final Probability Distribution—Part III, IEEE Transactions on Automatic Control 63 (9) (2018) 3112– 3118.doi:10.1109/TAC.2018.2791362
-
[7]
K. F. Caluya, A. Halder, Wasserstein Proximal Algorithms for the Schr¨ odinger Bridge Problem: Density Control With Nonlinear Drift, IEEE Transactions on Automatic Control 67 (3) (2022) 1163–1178.doi:10.1109/TAC.2021.3060704. 28
-
[8]
K. F. Caluya, A. Halder, Reflected Schr¨ odinger Bridge: Density Control with Path Constraints, in: 2021 American Control Conference (ACC), 2021, pp. 1137–1142.doi:10.23919/ACC50511. 2021.9482813
-
[9]
F. Vargas, P. Thodoroff, A. Lamacraft, N. Lawrence, Solving Schr¨ odinger Bridges via Maximum Likelihood, Entropy 23 (9) (2021) 1134.doi:10.3390/e23091134
-
[10]
Chen, G.-H
T. Chen, G.-H. Liu, E. Theodorou, Likelihood Training of Schr¨ odinger Bridge using Forward- Backward SDEs Theory, in: International Conference on Learning Representations, 2022
2022
-
[11]
De Bortoli, J
V. De Bortoli, J. Thornton, J. Heng, A. Doucet, Diffusion Schr¨ odinger Bridge with Applications to Score-Based Generative Modeling, in: Advances in Neural Information Processing Systems, Vol. 34, Curran Associates, Inc., 2021, pp. 17695–17709
2021
-
[12]
G.-H. Liu, A. Vahdat, D.-A. Huang, E. Theodorou, W. Nie, A. Anandkumar, I 2SB: Image-to- Image Schr¨ odinger Bridge, in: Proceedings of the 40th International Conference on Machine Learning, PMLR, 2023, pp. 22042–22062
2023
-
[13]
Y. Shi, V. De Bortoli, A. Campbell, A. Doucet, Diffusion Schr¨ odinger Bridge Matching, in: Thirty-Seventh Conference on Neural Information Processing Systems, 2023
2023
-
[14]
T. Zheng, Q. Han, H. Lin, Transporting Robotic Swarms Via Mean-Field Feedback Control, IEEE Transactions on Automatic Control 67 (8) (2022) 4170–4177.doi:10.1109/TAC.2021.3108672
-
[15]
K. Cui, M. Li, C. Fabian, H. Koeppl, Scalable Task-Driven Robotic Swarm Control via Collision Avoidance and Learning Mean-Field Control, in: 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 1192–1199.doi:10.1109/ICRA48891.2023.10161498
-
[16]
G. Rapakoulias, A. Reza Pedram, P. Tsiotras, Steering Large Agent Populations Using Mean- Field Schr¨ odinger Bridges With Gaussian Mixture Models, IEEE Control Systems Letters 9 (2025) 1760–1765.doi:10.1109/LCSYS.2025.3581859
-
[17]
Schiebinger, J
G. Schiebinger, J. Shu, M. Tabaka, B. Cleary, V. Subramanian, A. Solomon, J. Gould, S. Liu, S. Lin, P. Berube, L. Lee, J. Chen, J. Brumbaugh, P. Rigollet, K. Hochedlinger, R. Jaenisch, A. Regev, E. S. Lander, Optimal-Transport Analysis of Single-Cell Gene Expression Identifies Developmental Trajectories in Reprogramming, Cell 176 (4) (2019) 928–943.e22.do...
2019
-
[18]
A. Tong, J. Huang, G. Wolf, D. V. Van Dijk, S. Krishnaswamy, TrajectoryNet: A Dynamic Opti- mal Transport Network for Modeling Cellular Dynamics, in: Proceedings of the 37th International Conference on Machine Learning, PMLR, 2020, pp. 9526–9536
2020
-
[19]
Zhang, Z
Z. Zhang, Z. Wang, Y. Sun, T. Li, P. Zhou, Modeling Cell Dynamics and Interactions with Unbalanced Mean Field Schr¨ odinger Bridge, in: The Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
2025
-
[20]
Sznitman,Topics in propagation of chaos, in École d’Été de Probabilités de Saint-Flour XIX—1989, vol
A.-S. Sznitman, Topics in propagation of chaos, in: D. L. Burkholder, E. Pardoux, A.-S. Sznitman, P.-L. Hennequin (Eds.), Ecole d’Et´ e de Probabilit´ es de Saint-Flour XIX — 1989, Springer, Berlin, Heidelberg, 1991, pp. 165–251.doi:10.1007/BFb0085169
-
[21]
D. Lacker, A general characterization of the mean field limit for stochastic differential games, Probability Theory and Related Fields 165 (2016) 581–648.doi:10.1007/s00440-015-0641-9
-
[22]
R. Carmona, F. Delarue, Probabilistic Theory of Mean Field Games with Applications I: Mean Field FBSDEs, Control, and Games, Vol. 83 of Probability Theory and Stochastic Modelling, Springer International Publishing, Cham, 2018.doi:10.1007/978-3-319-58920-6
-
[23]
J. Backhoff, G. Conforti, I. Gentil, C. L´ eonard, The mean field Schr¨ odinger problem: Ergodic behavior, entropy estimates and functional inequalities, Probability Theory and Related Fields 178 (1) (2020) 475–530.doi:10.1007/s00440-020-00977-8. 29
-
[24]
C. Hern´ andez, L. Tangpi, Propagation of Chaos for Mean Field Schr¨ odinger Problems, SIAM Journal on Control and Optimization 63 (1) (2025) 112–150.doi:10.1137/23M1566716
-
[25]
H. Pham, X. Wei, Bellman equation and viscosity solutions for mean-field stochastic control problem, ESAIM: Control, Optimisation and Calculus of Variations 24 (1) (2018) 437–461.doi: 10.1051/cocv/2017019
-
[26]
G.-H. Liu, T. Chen, O. So, E. Theodorou, Deep Generalized Schr¨ odinger Bridge, Advances in Neural Information Processing Systems 35 (2022) 9374–9388
2022
-
[27]
J. Han, A. Jentzen, W. E, Solving High-Dimensional Partial Differential Equations using Deep Learning, Proceedings of the National Academy of Sciences 115 (34) (2018) 8505–8510.doi: 10.1073/pnas.1718942115
-
[28]
L. Ruthotto, S. J. Osher, W. Li, L. Nurbekyan, S. W. Fung, A machine learning framework for solving high-dimensional mean field game and mean field control problems, Proceedings of the National Academy of Sciences 117 (17) (2020) 9183–9193.doi:10.1073/pnas.1922204117
-
[29]
J. Han, R. Hu, J. Long, Learning High-Dimensional McKean–Vlasov Forward-Backward Stochas- tic Differential Equations with General Distribution Dependence, SIAM Journal on Numerical Analysis 62 (1) (2024) 1–24.doi:10.1137/22M151861X
-
[30]
R. Hu, B. Jin, M. Lauri` ere, J. Zhang, Deep Signature Approach for McKean-Vlasov FBSDEs in a Random Environment (Nov. 2025).arXiv:2511.09112,doi:10.48550/arXiv.2511.09112
-
[31]
Dayanikli, M
G. Dayanikli, M. Lauri` ere, J. Zhang, Deep Learning for Population-Dependent Controls in Mean Field Control Problems with Common Noise, in: Proceedings of the 23rd International Confer- ence on Autonomous Agents and Multiagent Systems, AAMAS ’24, International Foundation for Autonomous Agents and Multiagent Systems, Richland, SC, 2024, pp. 2231–2233
2024
-
[32]
Z. Cao, K. Das, N. Langren´ e, M. Lauri` ere, Scalable Method for Mean Field Control with Ker- nel Interactions via Random Fourier Features (Jan. 2026).arXiv:2601.01175,doi:10.48550/ arXiv.2601.01175
Pith/arXiv arXiv 2026
-
[33]
P. Dai Pra, A stochastic control approach to reciprocal diffusion processes, Applied Mathematics and Optimization 23 (1) (1991) 313–329.doi:10.1007/BF01442404
-
[34]
Cuturi, Sinkhorn Distances: Lightspeed Computation of Optimal Transport, in: Advances in Neural Information Processing Systems, Vol
M. Cuturi, Sinkhorn Distances: Lightspeed Computation of Optimal Transport, in: Advances in Neural Information Processing Systems, Vol. 26, Curran Associates, Inc., 2013, pp. 2292–2300
2013
-
[35]
Peyr´ e, M
G. Peyr´ e, M. Cuturi, Computational Optimal Transport, Foundations and Trends®in Machine Learning 11 (5-6) (2019) 355–607
2019
-
[36]
Gushchin, S
N. Gushchin, S. Kholkin, E. Burnaev, A. Korotin, Light and Optimal Schr¨ odinger Bridge Match- ing, in: Proceedings of the 41st International Conference on Machine Learning, Vol. 235 of ICML’24, JMLR.org, Vienna, Austria, 2024, pp. 17100–17122
2024
-
[37]
F. Lu, M. Zhong, S. Tang, M. Maggioni, Nonparametric inference of interaction laws in systems of agents from trajectory data, Proceedings of the National Academy of Sciences 116 (29) (2019) 14424–14433.doi:10.1073/pnas.1822012116
-
[38]
F. Lu, M. Maggioni, S. Tang, Learning interaction kernels in heterogeneous systems of agents from multiple trajectories, Journal of Machine Learning Research 22 (32) (2021) 1–67
2021
-
[39]
F. Lu, M. Maggioni, S. Tang, Learning Interaction Kernels in Stochastic Systems of Interacting Particles from Multiple Trajectories, Foundations of Computational Mathematics 22 (4) (2022) 1013–1067.doi:10.1007/s10208-021-09521-z
-
[40]
R. Yao, X. Chen, Y. Yang, Mean-field nonparametric estimation of interacting particle systems, in: Proceedings of Thirty Fifth Conference on Learning Theory, PMLR, 2022, pp. 2242–2275. 30
2022
-
[41]
Q. Lang, F. Lu, Learning Interaction Kernels in Mean-Field Equations of First-Order Systems of Interacting Particles, SIAM Journal on Scientific Computing 44 (1) (2022) A260–A285.doi: 10.1137/20M1377072
-
[42]
Y. Shi, W. Yang, L. Hong, Extracting interaction kernels for many-particle systems by a two-phase approach, Physics of Fluids 37 (3) (2025) 033331.doi:10.1063/5.0255706
-
[43]
J. Yang, X. Ye, R. Trivedi, H. Xu, H. Zha, Learning Deep Mean Field Games for Modeling Large Population Behavior, in: International Conference on Learning Representations, 2018
2018
-
[44]
L. Ding, W. Li, S. Osher, W. Yin, A Mean Field Game Inverse Problem, Journal of Scientific Computing 92 (1) (2022) 7.doi:10.1007/s10915-022-01825-8
-
[45]
H. Liu, C. Mou, S. Zhang, Inverse problems for mean field games, Inverse Problems 39 (8) (2023) 085003.doi:10.1088/1361-6420/acdd90
-
[46]
Z. Mo, X. Chen, X. Di, E. Iacomini, C. Segala, M. Herty, M. Lauriere, A Game-Theoretic Framework for Generic Second-Order Traffic Flow Models Using Mean Field Games and Ad- versarial Inverse Reinforcement Learning, Transportation Science 58 (6) (2024) 1403–1426. doi:10.1287/trsc.2024.0532
-
[47]
C. Fiedler, M. Herty, C. Segala, S. Trimpe, Recent kernel methods for interacting particle systems: First numerical results, European Journal of Applied Mathematics 36 (2) (2025) 464–489.doi: 10.1017/S0956792524000706
-
[48]
F. L´ eger, W. Li, Hopf–Cole transformation via generalized Schr¨ odinger bridge problem, Journal of Differential Equations 274 (2021) 788–827.doi:10.1016/j.jde.2020.10.029
-
[49]
B. Chazelle, Q. Jiu, Q. Li, C. Wang, Well-posedness of the limiting equation of a noisy consensus model in opinion dynamics, Journal of Differential Equations 263 (1) (2017) 365–397.doi: 10.1016/j.jde.2017.02.036
-
[50]
C. Bernardo, C. Altafini, A. Proskurnikov, F. Vasca, Bounded confidence opinion dynamics: A survey, Automatica 159 (2024) 111302.doi:10.1016/j.automatica.2023.111302
-
[51]
J. Garnier, G. Papanicolaou, T.-W. Yang, Consensus Convergence with Stochastic Effects, Viet- nam Journal of Mathematics 45 (1) (2017) 51–75.doi:10.1007/s10013-016-0190-2
-
[52]
F. Ceragioli, P. Frasca, Continuous-time Discontinuous Equations in Bounded Confidence Opinion Dynamics, IFAC Proceedings Volumes 44 (1) (2011) 1986–1990.doi:10.3182/ 20110828-6-IT-1002.02106
arXiv 2011
-
[53]
F. Ceragioli, P. Frasca, Continuous and discontinuous opinion dynamics with bounded confidence, Nonlinear Analysis: Real World Applications 13 (3) (2012) 1239–1251.doi:10.1016/j.nonrwa. 2011.10.002
-
[54]
G. Albi, S. Bicego, D. Kalise, Control of high-dimensional collective dynamics by deep neural feedback laws and kinetic modelling, Journal of Computational Physics 539 (2025) 114229.doi: 10.1016/j.jcp.2025.114229
-
[55]
S. Bicego, D. Kalise, G. A. Pavliotis, Computation and control of unstable steady states for mean field multiagent systems, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 481 (2311) (2025) 20240476.doi:10.1098/rspa.2024.0476. 31
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.