Towards Efficient and Evidence-grounded Mobility Prediction with LLM-Driven Agent
Pith reviewed 2026-06-28 07:01 UTC · model grok-4.3
The pith
An LLM agent framework improves next-location prediction by switching to iterative evidence gathering only on ambiguous cases.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
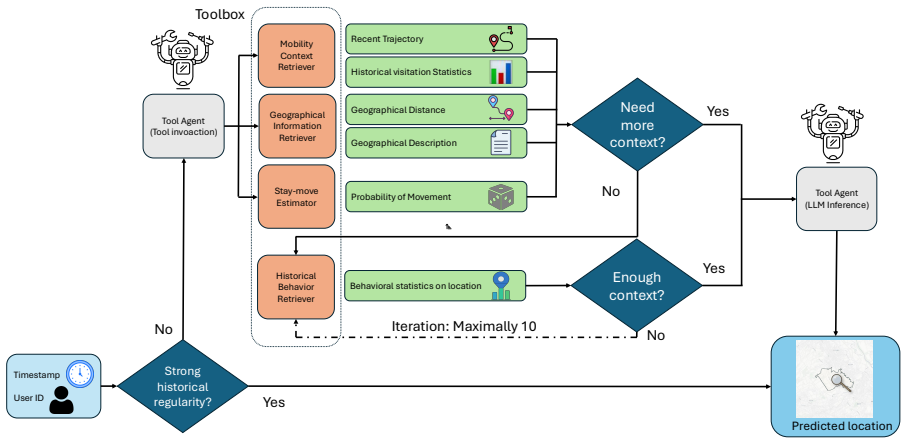
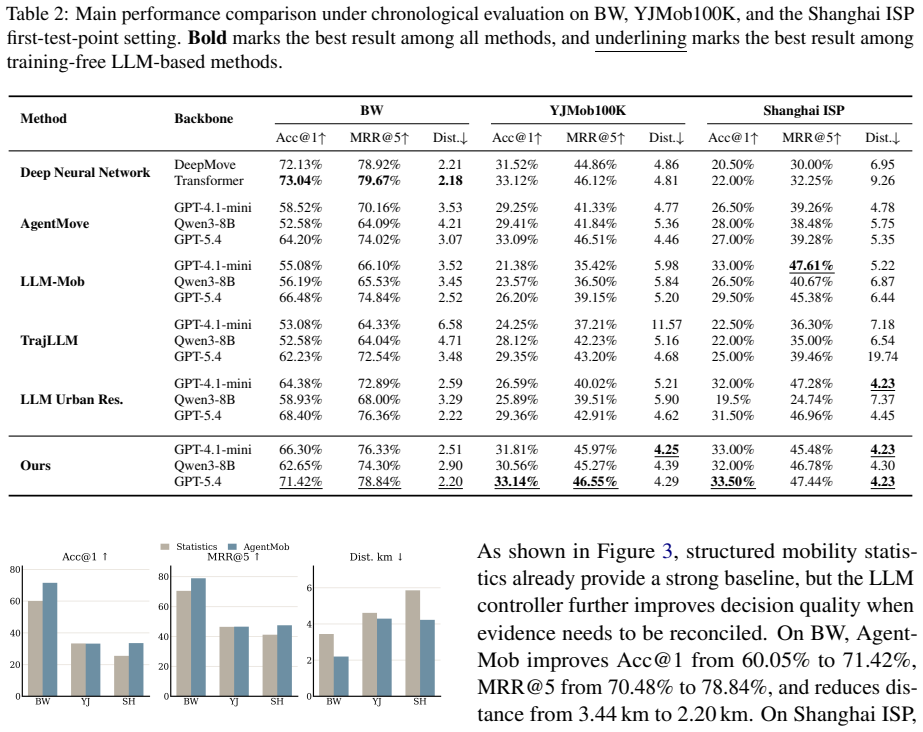
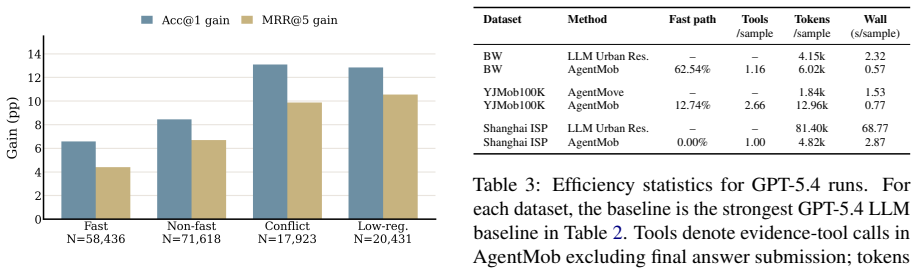
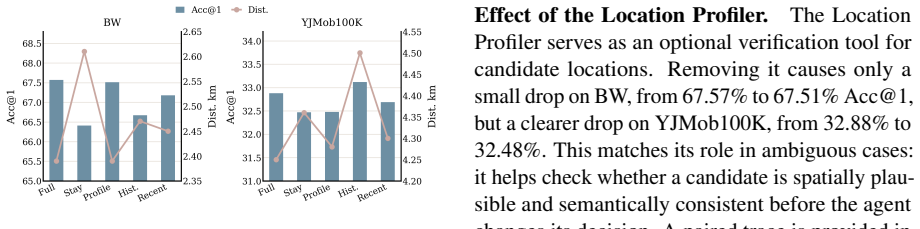
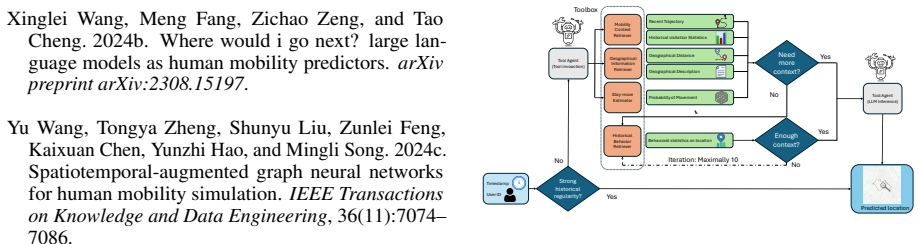
AgentMob formulates next-location prediction as adaptive evidence-controlled decision making. Routine cases are resolved through a fast path based on historical regularity while ambiguous cases trigger iterative tool use over recent trajectories, historical behavior, stay-move likelihood, and geographical evidence. Across three mobility datasets AgentMob records the strongest results among training-free LLM-based methods, and on BW non-fast-path cases the LLM controller raises Acc@1 from 30.65 percent to 48.62 percent over a statistical baseline that uses identical tools.
What carries the argument
The LLM controller that performs adaptive evidence-controlled decision making by choosing between the fast historical-regularity path and iterative calls to trajectory, behavior, likelihood, and geography tools.
Load-bearing premise
The LLM controller can reliably decide when to stop gathering evidence and the supplied tools contain enough information to resolve the ambiguous mobility cases.
What would settle it
A test set of ambiguous mobility instances in which the LLM controller produces no accuracy gain or a loss relative to the statistical baseline that uses the same four tools.
Figures
read the original abstract
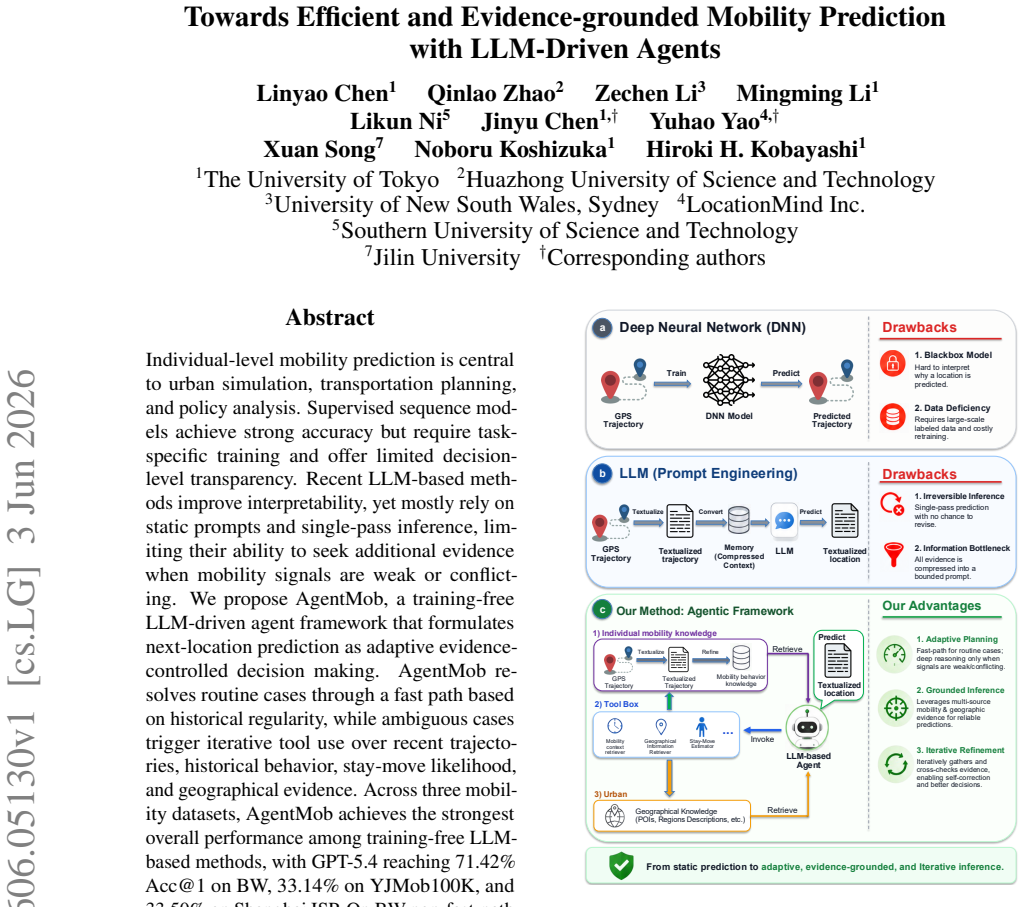
Individual-level mobility prediction is central to urban simulation, transportation planning, and policy analysis. Supervised sequence models achieve strong accuracy but require task-specific training and offer limited decision-level transparency. Recent LLM-based methods improve interpretability, yet mostly rely on static prompts and single-pass inference, limiting their ability to seek additional evidence when mobility signals are weak or conflicting. We propose \method{}, a training-free LLM-driven agent framework that formulates next-location prediction as adaptive evidence-controlled decision making. \method{} resolves routine cases through a fast path based on historical regularity, while ambiguous cases trigger iterative tool use over recent trajectories, historical behavior, stay-move likelihood, and geographical evidence. Across three mobility datasets, AgentMob achieves the strongest overall performance among training-free LLM-based methods, with GPT-5.4 reaching 71.42\% Acc@1 on BW, 33.14\% on YJMob100K, and 33.50\% on Shanghai ISP. On BW non-fast-path cases, the LLM controller improves Acc@1 from 30.65\% to 48.62\% over a same-tool statistical baseline, showing that its main benefit lies in resolving ambiguous predictions through adaptive evidence gathering. Our code is available at https://github.com/Unknown-zoo/AgentMob.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes AgentMob, a training-free LLM-driven agent framework for next-location mobility prediction. It distinguishes routine cases (fast path based on historical regularity) from ambiguous cases (iterative tool use over recent trajectories, historical behavior, stay-move likelihood, and geographical evidence). It reports the strongest performance among training-free LLM-based methods across three datasets (BW, YJMob100K, Shanghai ISP), with GPT-5.4 achieving 71.42% Acc@1 on BW, 33.14% on YJMob100K, and 33.50% on Shanghai ISP; on BW non-fast-path cases the LLM controller raises Acc@1 from 30.65% to 48.62% over a same-tool statistical baseline. Code is released at https://github.com/Unknown-zoo/AgentMob.
Significance. If the central results hold, the work supplies concrete evidence that adaptive, tool-augmented LLM agents can improve accuracy on ambiguous mobility cases without task-specific training, while preserving interpretability. The open code release is a clear strength that enables direct reproducibility checks.
major comments (2)
- [Abstract] Abstract: the headline claim that the LLM controller's main benefit lies in resolving ambiguous predictions through adaptive evidence gathering rests on the 30.65% → 48.62% Acc@1 gain on BW non-fast-path cases. The manuscript provides no ablation or independent verification of the stopping criterion that decides when the iterative loop halts, which is load-bearing for attributing the gain to evidence-grounded reasoning rather than iteration count alone.
- [Method (adaptive evidence-controlled decision making)] Method description of the adaptive evidence-controlled decision making process: the four tools (recent trajectories, historical behavior, stay-move likelihood, geographical evidence) are asserted to supply disambiguating signal for ambiguous cases, yet no test is reported that checks whether these signals are non-redundant with the fast-path regularity signal or whether the LLM reliably detects insufficiency. This assumption directly supports the claim that the improvement is LLM-specific.
minor comments (2)
- [Abstract] Abstract and experimental sections: reported accuracies lack error bars, confidence intervals, or robustness checks across prompt variations and dataset splits, which would be needed to confirm the controlled comparison is stable.
- The model identifier 'GPT-5.4' appears without clarification of its exact version or API details; this should be specified for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline claim that the LLM controller's main benefit lies in resolving ambiguous predictions through adaptive evidence gathering rests on the 30.65% → 48.62% Acc@1 gain on BW non-fast-path cases. The manuscript provides no ablation or independent verification of the stopping criterion that decides when the iterative loop halts, which is load-bearing for attributing the gain to evidence-grounded reasoning rather than iteration count alone.
Authors: We agree that an explicit ablation of the stopping criterion is needed to isolate its contribution from iteration count. In the revised manuscript we will add an ablation that varies the stopping rule (e.g., fixed iteration budget vs. LLM-decided sufficiency) on the BW non-fast-path subset and reports the resulting Acc@1 curves. revision: yes
-
Referee: [Method (adaptive evidence-controlled decision making)] Method description of the adaptive evidence-controlled decision making process: the four tools (recent trajectories, historical behavior, stay-move likelihood, geographical evidence) are asserted to supply disambiguating signal for ambiguous cases, yet no test is reported that checks whether these signals are non-redundant with the fast-path regularity signal or whether the LLM reliably detects insufficiency. This assumption directly supports the claim that the improvement is LLM-specific.
Authors: The fast-path applies a lightweight regularity threshold on historical visit frequencies, whereas the four tools supply finer-grained, multi-modal signals that the LLM controller queries only when the fast-path confidence is low. We will add to the revision (i) a quantitative comparison of tool-derived features against the fast-path regularity statistic and (ii) statistics on LLM-triggered tool calls together with manual inspection of cases where the controller correctly judged evidence to be insufficient. revision: yes
Circularity Check
No circularity: empirical results anchored by external baseline
full rationale
The paper presents an empirical method for mobility prediction using an LLM agent with tool use, reporting accuracies on three datasets and a specific gain (30.65% to 48.62% Acc@1) on non-fast-path cases versus a same-tool statistical baseline. No equations, derivations, or self-citations appear in the abstract or described method that reduce any claimed result to a fitted input or prior self-work by construction. The comparison to an independent baseline provides an external anchor, and the evaluation does not involve renaming known results or smuggling ansatzes. The derivation chain is self-contained as a practical system description rather than a closed mathematical reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
2025 , eprint=
From Narrative to Action: A Hierarchical LLM-Agent Framework for Human Mobility Generation , author=. 2025 , eprint=
2025
-
[2]
Sensors , volume=
Cognitive Agents in Urban Mobility: Integrating LLM Reasoning into Multi-Agent Simulations , author=. Sensors , volume=. 2025 , publisher=
2025
-
[3]
2026 , eprint=
A Survey of Large Language Models , author=. 2026 , eprint=
2026
-
[4]
2024 , eprint=
TinyLlama: An Open-Source Small Language Model , author=. 2024 , eprint=
2024
-
[5]
Proceedings of the 27th International Joint Conference on Artificial Intelligence , pages =
Chang, Buru and Park, Yonggyu and Park, Donghyeon and Kim, Seongsoon and Kang, Jaewoo , title =. Proceedings of the 27th International Joint Conference on Artificial Intelligence , pages =. 2018 , isbn =
2018
-
[6]
Next place prediction using mobility Markov chains , year =
Gambs, S\'. Next place prediction using mobility Markov chains , year =. Proceedings of the First Workshop on Measurement, Privacy, and Mobility , articleno =. doi:10.1145/2181196.2181199 , abstract =
-
[7]
Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence , pages =
Liu, Qiang and Wu, Shu and Wang, Liang and Tan, Tieniu , title =. Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence , pages =. 2016 , publisher =
2016
-
[8]
Li, Peibo and de Rijke, Maarten and Xue, Hao and Ao, Shuang and Song, Yang and Salim, Flora D. , year=. Large Language Models for Next Point-of-Interest Recommendation , url=. doi:10.1145/3626772.3657840 , booktitle=
-
[9]
arXiv preprint arXiv:2408.13918 , year=
Geo-llama: Leveraging llms for human mobility trajectory generation with spatiotemporal constraints , author=. arXiv preprint arXiv:2408.13918 , year=
-
[10]
Proceedings of the 2018 world wide web conference , pages=
Deepmove: Predicting human mobility with attentional recurrent networks , author=. Proceedings of the 2018 world wide web conference , pages=
2018
-
[11]
Proceedings of the 19th international conference on World wide web , pages=
Factorizing personalized markov chains for next-basket recommendation , author=. Proceedings of the 19th international conference on World wide web , pages=
-
[12]
arXiv preprint arXiv:2508.04038 , year=
ZARA: Training-Free Motion Time-Series Reasoning via Evidence-Grounded LLM Agents , author=. arXiv preprint arXiv:2508.04038 , year=
-
[13]
Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining , pages=
Going where, by whom, and at what time: Next location prediction considering user preference and temporal regularity , author=. Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining , pages=
-
[14]
Proceedings of the 26th ACM SIGKDD international conference on knowledge discovery & data mining , pages=
Geography-aware sequential location recommendation , author=. Proceedings of the 26th ACM SIGKDD international conference on knowledge discovery & data mining , pages=
-
[15]
Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages=
Next point-of-interest recommendation with auto-correlation enhanced multi-modal transformer network , author=. Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages=
-
[16]
Proceedings of the 19th International Conference on World Wide Web , pages =
Steffen Rendle and Christoph Freudenthaler and Lars Schmidt-Thieme , title =. Proceedings of the 19th International Conference on World Wide Web , pages =. 2010 , publisher =
2010
-
[17]
Proceedings of the web conference 2021 , pages=
Stan: Spatio-temporal attention network for next location recommendation , author=. Proceedings of the web conference 2021 , pages=
2021
-
[18]
Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =
Song Yang and Jiamou Liu and Kaiqi Zhao , title =. Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =. 2022 , publisher =
2022
-
[19]
Proceedings of the 46th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =
Xiaodong Yan and Tengwei Song and Yifeng Jiao and Jianshan He and Jiaotuan Wang and Ruopeng Li and Wei Chu , title =. Proceedings of the 46th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =. 2023 , publisher =
2023
-
[20]
arXiv preprint arXiv:2506.23306 , year=
GATSim: Urban Mobility Simulation with Generative Agents , author=. arXiv preprint arXiv:2506.23306 , year=
-
[21]
Ju, Chenlu and Liu, Jiaxin and Sinha, Shobhit and Xue, Hao and Salim, Flora , journal =
-
[22]
2026 , eprint=
GATSim: Urban Mobility Simulation with Generative Agents , author=. 2026 , eprint=
2026
-
[23]
Hu, Kai and Adornetto, Carlo and Alonso-Pastor, Luis and Noyman, Ariel and Atchade-Adelomou, Parfait and Mora-Carrero, Adrian and Liu, Yubo and Larson, Kent , journal =
-
[24]
Feng, Jie and Du, Yuwei and Zhao, Jie and Li, Yong , journal =
-
[25]
arXiv preprint arXiv:2203.02155 , year=
Training language models to follow instructions with human feedback , author=. arXiv preprint arXiv:2203.02155 , year=
-
[26]
arXiv preprint arXiv:2303.17760 , year=
CAMEL: Communicative Agents for ``Mind'' Exploration of Large Language Model Society , author=. arXiv preprint arXiv:2303.17760 , year=
-
[27]
arXiv preprint arXiv:2308.08155 , year=
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation , author=. arXiv preprint arXiv:2308.08155 , year=
-
[28]
arXiv preprint arXiv:2505.23885 , year=
OWL: Optimized Workforce Learning for General Multi-Agent Assistance in Real-World Task Automation , author=. arXiv preprint arXiv:2505.23885 , year=
-
[29]
arXiv preprint arXiv:2507.06229 , year=
Agent-KB: Knowledge Base Enhanced Multi-Agent Collaboration for Complex Task Solving , author=. arXiv preprint arXiv:2507.06229 , year=
-
[30]
arXiv preprint arXiv:2304.03442 , year=
Generative Agents: Interactive Simulacra of Human Behavior , author=. arXiv preprint arXiv:2304.03442 , year=
-
[31]
arXiv preprint arXiv:2412.04494 , year=
MAG-V: Multi-Agent Generative Verification for Robust Data Synthesis , author=. arXiv preprint arXiv:2412.04494 , year=
-
[32]
arXiv preprint arXiv:2112.09332 , year=
WebGPT: Browser-assisted question-answering with human feedback , author=. arXiv preprint arXiv:2112.09332 , year=
-
[33]
arXiv preprint arXiv:2307.16789 , year=
ToolLLM: Facilitating Large Language Models to Master 16,000+ Real-world APIs , author=. arXiv preprint arXiv:2307.16789 , year=
-
[34]
IEEE Transactions on Knowledge and Data Engineering , volume=
Spatiotemporal-augmented graph neural networks for human mobility simulation , author=. IEEE Transactions on Knowledge and Data Engineering , volume=. 2024 , publisher=
2024
-
[35]
Proceedings of the 32nd ACM International Conference on Advances in Geographic Information Systems , pages=
Imitate the Right Data: City-wide Mobility Generation with Graph Learning , author=. Proceedings of the 32nd ACM International Conference on Advances in Geographic Information Systems , pages=
-
[37]
Advances in Neural Information Processing Systems , volume=
Large language models as urban residents: An llm agent framework for personal mobility generation , author=. Advances in Neural Information Processing Systems , volume=
-
[38]
Computers, Environment and Urban Systems , volume=
Exploring large language models for human mobility prediction under public events , author=. Computers, Environment and Urban Systems , volume=. 2024 , publisher=
2024
-
[39]
Proceedings of the 48th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages=
Comapoi: A collaborative multi-agent framework for next poi prediction bridging the gap between trajectory and language , author=. Proceedings of the 48th International ACM SIGIR Conference on Research and Development in Information Retrieval , pages=
-
[40]
, author =
`smolagents`: a smol library to build great agentic systems. , author =
-
[41]
arXiv preprint arXiv:2408.12832 , year=
LIMP: Large Language Model Enhanced Intent-aware Mobility Prediction , author=. arXiv preprint arXiv:2408.12832 , year=
-
[42]
arXiv preprint arXiv:2308.15197 , year=
Where Would I Go Next? Large Language Models as Human Mobility Predictors , author=. arXiv preprint arXiv:2308.15197 , year=
-
[43]
Physics Reports , volume=
Human mobility: Models and applications , author=. Physics Reports , volume=. 2018 , publisher=
2018
-
[44]
Nature , volume=
Understanding individual human mobility patterns , author=. Nature , volume=. 2008 , publisher=
2008
-
[45]
Nature Communications , volume=
A deep gravity model for mobility flows generation , author=. Nature Communications , volume=. 2021 , publisher=
2021
-
[46]
Advances in Neural Information Processing Systems (NeurIPS) , volume=
Attention Is All You Need , author=. Advances in Neural Information Processing Systems (NeurIPS) , volume=
-
[47]
Nature , volume=
The scales of human mobility , author=. Nature , volume=. 2020 , publisher=
2020
-
[48]
Scientific Data , volume =
YJMob100K: City-scale and longitudinal dataset of anonymized human mobility trajectories , author =. Scientific Data , volume =. 2024 , doi =
2024
-
[49]
Blogwatcher , year =
-
[50]
ACM Transactions on Intelligent Systems and Technology , volume=
Urban computing: concepts, methodologies, and applications , author=. ACM Transactions on Intelligent Systems and Technology , volume=. 2014 , publisher=
2014
-
[51]
ACM Computing Surveys , volume=
A survey on deep learning for human mobility , author=. ACM Computing Surveys , volume=. 2021 , publisher=
2021
-
[52]
ACM Transactions on Intelligent Systems and Technology , volume=
Trajectory data mining: An overview , author=. ACM Transactions on Intelligent Systems and Technology , volume=
-
[53]
Mobile phone data for informing public health actions across the
Oliver, Nuria and Lepri, Bruno and Sterly, Harald and others , journal=. Mobile phone data for informing public health actions across the
-
[54]
2025 , eprint=
Qwen3 Technical Report , author=. 2025 , eprint=
2025
-
[55]
2025 , howpublished =
OpenAI , title =. 2025 , howpublished =
2025
-
[56]
Wang, Chuyue and Feng, Jie and Wu, Yuxi and Yi, Shenglin and Zhang, Hang , year =. 2604.17419 , archivePrefix=
-
[57]
2019 , doi =
Feng, Jie and Zhang, Mingyang and Wang, Huandong and Yang, Zeyu and Zhang, Chao and Li, Yong and Jin, Depeng , booktitle =. 2019 , doi =
2019
-
[58]
2026 , month = mar, howpublished =
Introducing. 2026 , month = mar, howpublished =
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.