3D Underwater Path Planning via Generative Flow Field Surrogates
Pith reviewed 2026-06-28 01:26 UTC · model grok-4.3
The pith
Conditional generative adversarial networks recover 45-60% of CFD benefits for 3D underwater path planning at edge-device speeds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Both cGAN architectures recover approximately 45-60% of the CFD energy benefit and high-velocity cell avoidance benefit while operating at inference speeds compatible with edge device use.
What carries the argument
Conditional generative adversarial networks that synthesise 128^3 voxel flow field volumes from scalar operating condition inputs, used as drop-in replacements for CFD data inside the energy-weighted A* path planner.
Load-bearing premise
The flow fields produced by the cGANs are accurate enough in the regions that affect path costs and high-velocity encounters for the planner to capture most of the CFD-derived advantages.
What would settle it
A side-by-side test in which paths planned on cGAN fields achieve less than 20% of the energy reduction or high-velocity avoidance improvement that the same planner achieves when given the corresponding ground-truth CFD fields.
Figures
read the original abstract
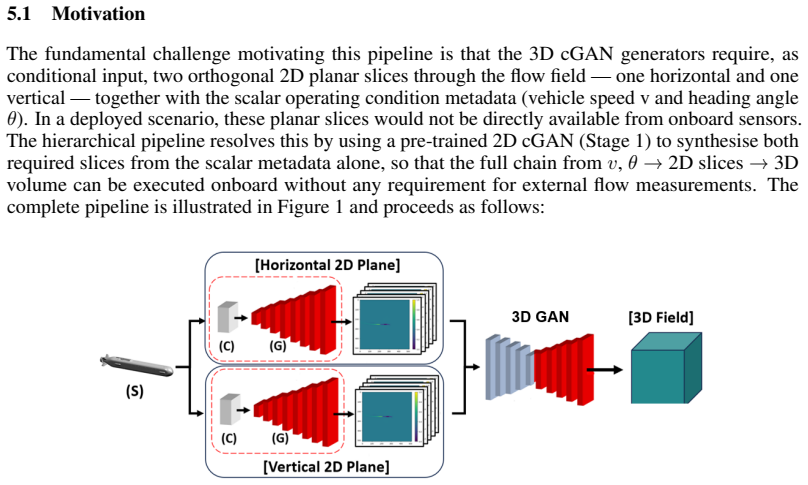
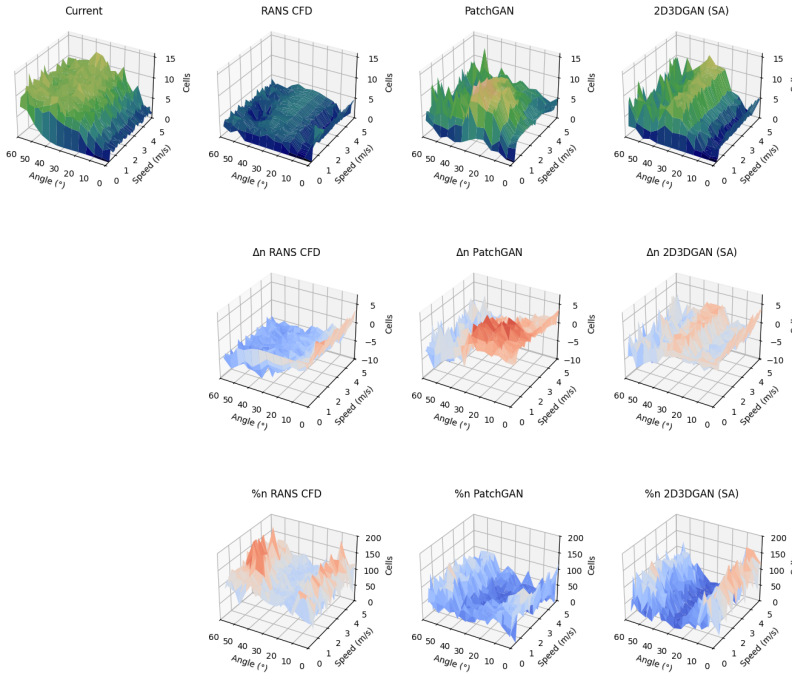
Autonomous underwater vehicle (AUV) launch and recovery (LAR) into the hull of an advancing host platform requires traversal of a complex, three-dimensional propeller wake whose hydrodynamic structure cannot be characterised by a uniform current model. High-fidelity Reynolds-Averaged Navier-Stokes (RANS) Computational Fluid Dynamics (CFD) simulations resolve this structure with sufficient accuracy for path planning, but their computational cost renders them impractical for onboard use. We address this gap by integrating two conditional generative adversarial network (cGAN) architectures -- a regularised PatchGAN and a 2D3DGAN with self-attention -- as drop-in replacements for RANS CFD data within a three-dimensional, energy-weighted A* path planning framework. Both generators are driven by a hierarchical pipeline that synthesises full $128^3$ voxel flow field volumes from scalar operating condition inputs alone, with end-to-end inference times of approximately 28-146 $\mu$s, compared to hours for a single RANS computation. We benchmark all four environmental knowledge levels: uniform current, ground-truth CFD, PatchGAN, and 2D3DGAN~SA across 19,800 independently generated trajectories spanning 550 distinct flow conditions. Full CFD wake knowledge reduces energy expenditure by 5.7-12.5% and high-velocity wake-core encounters by up to 77.8% relative to uniform-current planning, with both benefits scaling with operating severity. The cGAN surrogates recover approximately 45-60% of the CFD energy benefit and high-velocity cell avoidance benefit while operating at inference speeds compatible with edge device use. These results provide the first systematic quantification of the downstream path planning value of cGAN-predicted hydrodynamic fields in a three-dimensional maritime robotics application.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces two cGAN architectures (regularised PatchGAN and 2D3DGAN with self-attention) as fast surrogates for RANS CFD to generate 128^3 3D flow fields from scalar operating conditions. These surrogates are integrated into an energy-weighted 3D A* planner for AUV launch/recovery through propeller wakes. On a benchmark of 19,800 trajectories across 550 synthetic flow conditions, full CFD reduces energy use by 5.7-12.5% and high-velocity encounters by up to 77.8% versus uniform-current planning; the cGANs recover 45-60% of those benefits at 28-146 μs inference times.
Significance. If the surrogate fidelity holds in planner-critical regions, the work supplies the first quantitative demonstration that generative models can deliver usable hydrodynamic awareness for real-time maritime path planning, closing the gap between expensive CFD and edge-device deployment. The scale of the trajectory benchmark (19,800 independent cases) and direct comparison to independent ground-truth CFD are strengths that allow a clear measurement of recovered benefit.
major comments (2)
- [Abstract] Abstract: The headline recovery percentages (45-60% of CFD energy and avoidance benefits) rest on the assumption that the 550 synthetic RANS conditions plus 19,800 trajectories adequately sample the flow structures that matter for planning. The manuscript states that all training and benchmarking use synthetic RANS data generated from scalar inputs with no experimental PIV, LES, or at-sea measurements referenced; if real propeller wakes contain unmodeled features (hull interaction, unsteady shedding, geometry-specific effects) that alter velocity fields in ways absent from the training distribution, the reported recovery will not transfer to the claimed maritime robotics application.
- [Abstract] Abstract: The claim that the cGANs operate 'at inference speeds compatible with edge device use' and provide 'the first systematic quantification ... in a three-dimensional maritime robotics application' is presented without any discussion of how the synthetic condition set was constructed or validated for coverage of real wake variability, which is load-bearing for the downstream planning metrics.
minor comments (1)
- [Abstract] The abstract introduces two distinct cGAN architectures but does not indicate which quantitative results correspond to each; a short parenthetical or table reference would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract and the scope of our synthetic dataset. We address each point below and will revise the manuscript accordingly to clarify limitations while preserving the core contribution of the benchmark study.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline recovery percentages (45-60% of CFD energy and avoidance benefits) rest on the assumption that the 550 synthetic RANS conditions plus 19,800 trajectories adequately sample the flow structures that matter for planning. The manuscript states that all training and benchmarking use synthetic RANS data generated from scalar inputs with no experimental PIV, LES, or at-sea measurements referenced; if real propeller wakes contain unmodeled features (hull interaction, unsteady shedding, geometry-specific effects) that alter velocity fields in ways absent from the training distribution, the reported recovery will not transfer to the claimed maritime robotics application.
Authors: We agree that all results are obtained on synthetic RANS data and that the reported recovery percentages cannot be claimed to transfer to real propeller wakes without experimental validation. The 550 conditions were generated by varying scalar inputs (advance speed, propeller rate, etc.) over ranges representative of AUV LAR operations to produce diverse 3D wake structures. We will revise the abstract to explicitly qualify that the 45-60% recovery is measured relative to ground-truth RANS CFD within the synthetic domain and add a limitations paragraph noting the absence of experimental PIV/LES/at-sea data. revision: yes
-
Referee: [Abstract] Abstract: The claim that the cGANs operate 'at inference speeds compatible with edge device use' and provide 'the first systematic quantification ... in a three-dimensional maritime robotics application' is presented without any discussion of how the synthetic condition set was constructed or validated for coverage of real wake variability, which is load-bearing for the downstream planning metrics.
Authors: We will add a dedicated subsection describing the synthetic dataset construction, including the ranges and sampling of scalar operating conditions and the resulting coverage of wake features (velocity deficits, vortices). The inference-speed claim is supported by the reported 28-146 μs timings on standard hardware. The 'first systematic quantification' refers to the scale of the 19,800-trajectory benchmark with direct CFD comparison; we will revise the phrasing to 'first systematic quantification in simulated three-dimensional maritime robotics scenarios' to avoid overstatement. revision: yes
- We do not have access to experimental PIV, LES, or at-sea measurements and therefore cannot demonstrate that the reported recovery percentages transfer to real propeller wakes containing unmodeled features.
Circularity Check
No circularity: benchmarks use independent CFD ground truth
full rationale
The paper trains cGAN surrogates on synthetic RANS data and reports path-planning benefits by directly comparing energy expenditure and high-velocity encounters across four knowledge levels (uniform current, ground-truth CFD, PatchGAN, 2D3DGAN-SA) on 19,800 trajectories. These metrics are computed from A* simulations using the respective flow fields as inputs; no equation reduces the 45-60% recovery figure to a fitted parameter or self-referential definition, and no self-citation chain is invoked to justify the central claims. The derivation therefore remains self-contained against external CFD benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Z. Cooper-Baldock, P. E. Santos, R. S. A. Brinkworth, and K. Sammut. Hydrodynamic Analysis of Payload Bay Berthing for Underwater Vehicles.IEEE Journal of Oceanic Engineering, 49:727–748, 2024.doi:10.1109/JOE.2024.3352714
-
[2]
Cooper-Baldock, P
Z. Cooper-Baldock, P. E. Santos, R. S. A. Brinkworth, and K. Sammut. Payload Bay Berthing of Underwater Vehicles with a Larger XLUUV.7th Submarine Science, Technology & Engineering Conference 2023 (SubSTEC7), 1:97–104.doi:970-0-9944841-4-7
2023
-
[3]
Zachary Cooper-Baldock, Stephen R. Turnock, and Karl Sammut. Wake-informed 3d path plan- ning for autonomous underwater vehicles using a and neural network approximations.Ocean Engineering, 332:121353, 2025. URL: https://www.sciencedirect.com/science/ article/pii/S0029801825010662,doi:10.1016/j.oceaneng.2025.121353. 31
-
[4]
Turbulence-aware uav path planning in urban environments
Enrique Aldao Pensado, Gabriel Fontenla Carrera, Fernando Veiga López, Higinio González Jorge, and Elena Martín Ortega. Turbulence-aware uav path planning in urban environments. In 2024 International Conference on Unmanned Aircraft Systems (ICUAS), pages 280–285, 2024. doi:10.1109/ICUAS60882.2024.10556934
-
[5]
Zachary Cooper-Baldock, Paulo E. Santos, Russell S. A. Brinkworth, and Karl Sammut. A generalised novel loss function for computational fluid dynamics, 2024. URL:https://arxiv. org/abs/2411.17059,arXiv:2411.17059
arXiv 2024
-
[6]
PhD thesis, College of Science and Engineering, Flinders University, Australia, 2026
Zachary Cooper-Baldock.Rapid Flow Field Approximation via Generative Machine Learning for Underwater Vehicles. PhD thesis, College of Science and Engineering, Flinders University, Australia, 2026
2026
-
[7]
Yousif, Linqi Yu, Sergio Hoyas, Ricardo Vinuesa, and HeeChang Lim
Mustafa Z. Yousif, Linqi Yu, Sergio Hoyas, Ricardo Vinuesa, and HeeChang Lim. A deep- learning approach for reconstructing 3D turbulent flows from 2D observation data.Nature Scientific Reports, 13, 2023.doi:10.1038/s41598-023-29525-9
-
[8]
Zachary Cooper-Baldock, Paulo E. Santos, Russell S.A. Brinkworth, and Karl Sammut. Wake- set, 2026. URL: https://huggingface.co/datasets/ZacharyCB99/WAKESET, doi: 10.57967/HF/7698
-
[9]
Zheng Zeng, Karl Sammut, Lian Lian, Andrew Lammas, Fangpo He, and Youhong Tang. Rendezvous path planning for multiple autonomous marine vehicles.IEEE Journal of Oceanic Engineering, 43(3):640–664, 2018.doi:10.1109/JOE.2017.2723058
-
[10]
Xiaohong Li and Shuanghe Yu. Three-dimensional path planning for auvs in ocean currents environment based on an improved compression factor particle swarm optimization algorithm. Ocean Engineering, 280:114610, 2023.doi:10.1016/j.oceaneng.2023.114610
-
[11]
C. Petres, Y . Pailhas, P. Patron, Y . Petillot, J. Evans, and D. Lane. Path planning for autonomous underwater vehicles.IEEE Transactions on Robotics, 23:331–341, 2007. doi:10.1109/TRO. 2007.895057
work page doi:10.1109/tro 2007
-
[12]
J. C. Latombe.Robot Motion Planning. The Netherlands: Kluwer, 1991
1991
-
[13]
J. G. Bellingham and J. S. Willcox. Optimizing auv oceanographic surveys.Proc. IEEE Symp. Autonomous Underwater Vehicles Technology, 1:391—-398, 1996
1996
-
[14]
J. D. Hernández, E. Vidal, G. Vallicrosa, E. Galceran, and M. Carreras. Online path planning for autonomous underwater vehicles in unknown environments.2015 IEEE International Conference on Robotics and Automation (ICRA), 1:1152–1157, 2015. doi:10.1109/ICRA. 2015.7139336
-
[15]
Peter E. Hart, Nils J. Nilsson, and Bertram Raphael. A formal basis for the heuristic deter- mination of minimum cost paths.IEEE Transactions on Systems Science and Cybernetics, 4(2):100–107, 1968.doi:10.1109/TSSC.1968.300136
-
[16]
B. Garau, A. Alvarez, and G. Oliver. Path planning of autonomous underwater vehicles in current fields with complex spatial variability: an a* approach. InProceedings of the 2005 IEEE International Conference on Robotics and Automation, pages 194–198, 2005. doi:10.1109/ROBOT.2005.1570118
-
[17]
Clment Petres, Yan Pailhas, Pedro Patron, Yvan Petillot, Jonathan Evans, and David Lane. Path planning for autonomous underwater vehicles.IEEE Transactions on Robotics, 23(2):331–341, 2007.doi:10.1109/TRO.2007.895057
-
[18]
Optimal auv path planning for extended missions in complex, fast-flowing estuarine environments
Dov Kruger, Rustam Stolkin, Aaron Blum, and Joseph Briganti. Optimal auv path planning for extended missions in complex, fast-flowing estuarine environments. InProceedings 2007 IEEE International Conference on Robotics and Automation, pages 4265–4270, 2007. doi: 10.1109/ROBOT.2007.364135
-
[19]
Chinmay S. Kulkarni and Pierre F.J. Lermusiaux. Three-dimensional time-optimal path planning in the ocean.Ocean Modelling, 152:101644, 2020. doi:10.1016/j.ocemod.2020.101644. 32
-
[20]
S. Mahmoud Zadeh, D.W.M. Powers, A.M. Yazdani, K. Sammut, and A. Atyabi. Effi- cient auv path planning in time-variant underwater environment using differential evolu- tion algorithm.Journal of Marine Science and Application, 17:585–591, 2018. doi: 10.1007/s11804-018-0034-4
-
[21]
S. M. LaValle.Planning Algorithms. Cambridge University Press, 2006
2006
-
[22]
Jaroslav Janoš, V ojtˇech V onásek, and Robert Pˇeniˇcka. Multi-goal path planning using multiple random trees.IEEE Robotics and Automation Letters, 6(2):4201–4208, 2021. doi:10.1109/ LRA.2021.3068679
arXiv 2021
-
[23]
Khaled Akka and Farid Khaber. Mobile robot path planning using an improved ant colony optimization.International Journal of Advanced Robotic Systems, 15(3):1729881418774673, 2018.doi:10.1177/1729881418774673
-
[24]
A. Alvarez, A. Caiti, and R. Onken. Evolutionary path planning for autonomous underwater vehicles in a variable ocean.IEEE Journal of Oceanic Engineering, 29(2):418–429, 2004. doi:10.1109/JOE.2004.827837
-
[25]
Perception as policy: Learning perceptual representations for safe decision-making
Mark Pfeiffer, Sudeep Shukla, Cesar Cadena, and Davide Scaramuzza. Perception as policy: Learning perceptual representations for safe decision-making. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 6236–6243. IEEE, 2017
2017
-
[26]
A deep-network solution towards model-less obstacle avoidance
Lei Tai, Jiang Li, and Ming Liu. A deep-network solution towards model-less obstacle avoidance. In2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2759–2764. IEEE, 2017
2017
-
[27]
Zachary Cooper-Baldock, Brenda Vara Almirall, and Kiao Inthavong. Speed, power and cost implications for GPU acceleration of Computational Fluid Dynamics on HPC systems, 2024. arXiv:2404.02482
arXiv 2024
-
[28]
Raissi, P
M. Raissi, P. Perdikaris, and G.E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019. doi:10.1016/ j.jcp.2018.10.045
2019
-
[29]
S. Hanrahan, M. Kozul, and R.D. Sandberg. Studying turbulent flows with physics-informed neural networks and sparse data.International Journal of Heat and Fluid Flow, 104:109232, 2023.doi:10.1016/j.ijheatfluidflow.2023.109232
-
[30]
Amer Farea, Olli Yli-Harja, and Frank Emmert-Streib. Understanding physics-informed neural networks: Techniques, applications, trends, and challenges.AI, 5(3):1534–1557, 2024. URL: https://www.mdpi.com/2673-2688/5/3/74,doi:10.3390/ai5030074
-
[31]
Characterizing possible failure modes in physics-informed neural networks (characterizing-pinns-failure-modes) v0
Aditi Krishnapriyan. Characterizing possible failure modes in physics-informed neural networks (characterizing-pinns-failure-modes) v0. 1.0. Technical report, Lawrence Berkeley National Laboratory (LBNL), Berkeley, CA (United States), 2021
2021
-
[32]
Anqing Xuan and Lian Shen. Reconstruction of three-dimensional turbulent flow structures using surface measurements for free-surface flows based on a convolutional neural network. Journal of Fluid Mechanics, 959:A34, 2023.doi:10.1017/jfm.2023.154
-
[33]
Minhyeok Lee and Junhee Seok. Controllable generative adversarial network.IEEE Access, 7:28158–28169, 2019.doi:10.1109/ACCESS.2019.2899108
-
[34]
Conditional generative adversarial nets, 2014
Mehdi Mirza and Simon Osindero. Conditional generative adversarial nets, 2014. URL: https://arxiv.org/abs/1411.1784,arXiv:1411.1784
Pith/arXiv arXiv 2014
-
[35]
Liu Yang, Dongkun Zhang, and George Em Karniadakis. Physics-informed generative adver- sarial networks for stochastic differential equations.SIAM Journal on Scientific Computing, 42(1):A292–A317, 2020.doi:10.1137/18M1225409
-
[36]
AIAA, 2020.doi:10.2514/6.2020-3185
Emre Yilmaz and Brian German.Conditional Generative Adversarial Network Framework for Airfoil Inverse Design. AIAA, 2020.doi:10.2514/6.2020-3185. 33
-
[37]
Navier–stokes generative adversarial network: a physics-informed deep learning model for fluid flow generation.Neural Computing and Applications, 34:11539–11552, 2022
Pin Wu, Kaikai Pan, Lulu Ji, Siquan Gong, Weibing Feng, Wenyan Yuan, and Christopher Pain. Navier–stokes generative adversarial network: a physics-informed deep learning model for fluid flow generation.Neural Computing and Applications, 34:11539–11552, 2022
2022
-
[38]
Self-attention generative adversarial networks
Han Zhang, Ian Goodfellow, Dimitris Metaxas, and Augustus Odena. Self-attention generative adversarial networks. In Kamalika Chaudhuri and Ruslan Salakhutdinov, editors,Proceedings of the 36th International Conference on Machine Learning, volume 97 ofProceedings of Machine Learning Research, pages 7354–7363. PMLR, 6 2019
2019
-
[39]
Phillip Isola, Jun-Yan Zhu, Tinghui Zhou, and Alexei A. Efros. Image-to-image translation with conditional adversarial networks. In2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 5967–5976, 2017.doi:10.1109/CVPR.2017.632
-
[40]
Yousif, Linqi Yu, and Hee-Chang Lim
Mustafa Z. Yousif, Linqi Yu, and Hee-Chang Lim. High-fidelity reconstruction of turbulent flow from spatially limited data using enhanced super-resolution generative adversarial network. Physics of Fluids, 33(12):125119, 12 2021. arXiv:https://pubs.aip.org/aip/pof/ article-pdf/doi/10.1063/5.0066077/15873357/125119\_1\_online.pdf, doi:10. 1063/5.0066077
-
[41]
Film: visual reasoning with a general conditioning layer
Ethan Perez, Florian Strub, Harm de Vries, Vincent Dumoulin, and Aaron Courville. Film: visual reasoning with a general conditioning layer. InProceedings of the Thirty-Second AAAI Conference on Artificial Intelligence and Thirtieth Innovative Applications of Artificial Intelligence Conference and Eighth AAAI Symposium on Educational Advances in Artificial...
2018
-
[42]
Shahin Masoumi-Verki, Fariborz Haghighat, Nizar Bouguila, and Ursula Eicker. The use of GANs and transfer learning in model-order reduction of turbulent wake of an isolated high-rise building.Building and Environment, 246:110948, 2023. doi:10.1016/j.buildenv.2023. 110948
-
[43]
Data-driven prediction of unsteady flow over a circular cylinder using deep learning.Journal of Fluid Mechanics, 879:217–254, 2019
Sangseung Lee and Donghyun You. Data-driven prediction of unsteady flow over a circular cylinder using deep learning.Journal of Fluid Mechanics, 879:217–254, 2019. doi:10.1017/ jfm.2019.700
2019
-
[44]
Reconstruction of 3d porous media from 2d slices, 2021
Denis V olkhonskiy, Ekaterina Muravleva, Oleg Sudakov, Denis Orlov, Boris Belozerov, Evgeny Burnaev, and Dmitry Koroteev. Reconstruction of 3d porous media from 2d slices, 2021. URL: https://arxiv.org/abs/1901.10233,arXiv:1901.10233
arXiv 2021
-
[45]
Autonomous systems – echo voyager
Boeing. Autonomous systems – echo voyager. Technical report, Boeing Defense,
-
[46]
URL: https://www.boeing.com/defense/autonomous-systems/echovoyager/ index.page
-
[47]
Echo voyager system specification and overview
Boeing. Echo voyager system specification and overview. Technical report, Boe- ing, 2023. URL: https://www.boeing.com/resources/boeingdotcom/defense/ autonomoussystems/echo-voyager/echo_voyager_product_sheet.pdf
2023
-
[48]
G. Alfonsi. Reynolds-averaged navier–stokes equations for turbulence modelling.Appl. Mech. Rev, 62:040802, 2009.doi:10.1115/1.3124648
-
[49]
T. H. Shih, W. W. Liou, A. Shabbir, Z. Yang, and J. Zhu. A new k-e eddy viscosity model for high reynolds number turbulent flows - model development and validation.Comput. Fluids, 24:227–238, 1995.doi:10.1016/0045-7930(94)00032-T
-
[50]
Y . C. Pan, H. X. Zhang, and Q. D. Zhou. Numerical prediction of submarine hydrody- namic coefficients using cfd simulation.J. Hydrodyn., 24:840–847, 2012. doi:10.1016/ S1001-6058(11)60311-9
2012
-
[51]
A. B. Phillips, S. R. Turnock, and M. Furlong. Influence of turbulence closure models on the vortical flow field around a submarine body undergoing steady drift.J. Mar. Sci. Technol., 15:201–217, 2010.doi:10.1007/s00773-010-0090-1
-
[52]
Modelling turbulence: Standard, rng, and realizable ke models theory
ANSYS. Modelling turbulence: Standard, rng, and realizable ke models theory. Technical report, Washington Univ., Seattle WA, USA, 2006. URL: https://courses.washington. edu/mengr544/handouts-10/Fluent-k-epsilon.pdf. 34
2006
-
[53]
M. C. Özden, A. Y . Gürkan, Y . A. Özden, T. G. Canyurt, and E. Korkut. Underwater radiated noise prediction for a submarine propeller in different flow conditions.Ocean Eng., 126:488– 500, 2016.doi:10.1016/j.oceaneng.2016.06.012
-
[54]
Andersen, J
P. Andersen, J. J. Kappel, and E. F. Spangenberg. Aspects of propeller developments for a submarine.Proc. 1st Int. Symp. Mar. Propulsors, pages 1–8, 2009
2009
-
[55]
M. A. Chamberlain, P. R. Oke, G. B. Brassington, P. Sandery, P. Divakaran, and R. A. S. Fiedler. Multiscale data assimilation in the bluelink ocean reanalysis (bran).Ocean Model., 166, 2021. doi:10.1016/j.ocemod.2021.101849
-
[56]
M. E. Q. Pilson.An Introduction to the Chemistry of the Sea, 2nd Ed.Cambridge Univ. Press, 2012
2012
-
[57]
M. H. Sharqawy, J. H. V . Lienhard, and S. M. Zubair. Thermophysical properties of seawater: A review of existing correlations and data.Desalination Water Treat., 16:354–380, 2010. doi:10.5004/dwt.2010.1079
-
[58]
F. J. Millero, G. Perron, and J. E. Desnoyers. Heat capacity of seawater solutions from 5c to 35c and 0.5 to 22% chlorinity.J. Geophys. Res.,, 78:4499–4507, 1973. doi:10.1029/ JC078i021p04499
1973
-
[59]
V . J. Castelli, E. M. Stanley, and E. C. Fischer. The thermal conductivity of seawater as a function of pressure and temperature.Deep Sea Res. Oceanogr. Abstr, 21:311–319, 1974. doi:10.1016/0011-7471(74)90102-8
-
[60]
J. D. Isdale.Viscosity of simple liquids including measurement and prediction at elevated pressure. PhD thesis, Dept. Chem. Process Eng., Univ. of Strathclyde, Glasgow, U.K., 1976
1976
-
[61]
H. U. Sverdrup, M. W. Johnson, and R. H. Fleming.The Oceans, Their Physics, Chemistry and General Biology. Prentice-Hall, 1942
1942
-
[62]
Which training methods for gans do actually converge? InProceedings of the 35th International Conference on Machine Learning, volume 80
Lars Mescheder, Andreas Geiger, and Sebastian Nowozin. Which training methods for gans do actually converge? InProceedings of the 35th International Conference on Machine Learning, volume 80. PMLR, 2018
2018
-
[63]
Deconvolution and checkerboard artifacts
Augustus Odena, Vincent Dumoulin, and Chris Olah. Deconvolution and checkerboard artifacts. Distill, 2016. URL: http://distill.pub/2016/deconv-checkerboard, doi:10.23915/ distill.00003
2016
-
[64]
Spectral normalization for generative adversarial networks.CoRR, abs/1802.05957, 2018
Takeru Miyato, Toshiki Kataoka, Masanori Koyama, and Yuichi Yoshida. Spectral normalization for generative adversarial networks.CoRR, abs/1802.05957, 2018. URL: http://arxiv.org/ abs/1802.05957,arXiv:1802.05957
Pith/arXiv arXiv 2018
-
[65]
Strided convolution instead of max pooling for memory efficiency of convolutional neural networks
Riadh Ayachi, Mouna Afif, Yahia Said, and Mohamed Atri. Strided convolution instead of max pooling for memory efficiency of convolutional neural networks. In Med Salim Bouhlel and Stefano Rovetta, editors,Proceedings of the 8th International Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT’18), Vol.1, pages ...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.