Breaking Time: A Fully Gaussian Framework for Distributed and Continuous-Time SLAM
Pith reviewed 2026-06-28 01:03 UTC · model grok-4.3
The pith
G-solver fuses Gaussian Belief Propagation with Gaussian Process priors to estimate continuous-time trajectories from asynchronous heterogeneous sensors in a distributed way.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
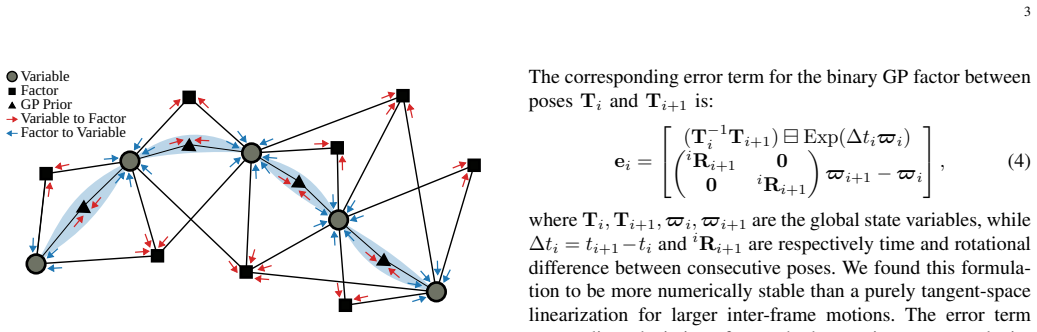
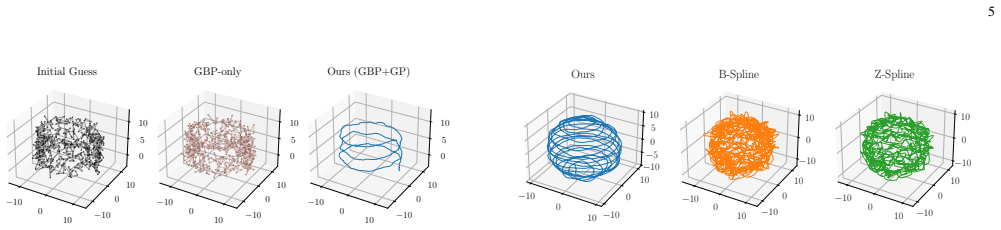
We introduce G-solver, a fully Gaussian and distributed framework that combines Gaussian Belief Propagation (GBP) with Gaussian Process (GP) motion priors for continuous-time trajectory estimation. Our GP model provides a probabilistic representation of the trajectory, enabling consistent interpolation and the use of data-driven hyperparameters, while GBP offers a scalable message-passing formulation well-suited for decentralized settings. The resulting solver naturally extends to multi-camera scenarios without specialized synchronization or engineering effort. We evaluate the approach on synthetic and real data, including rolling shutter and distributed multi-camera optimization, demonstrat
What carries the argument
G-solver, the pairing of Gaussian Belief Propagation message passing with a Gaussian Process motion prior that supplies both the trajectory representation and the factor-graph factors.
If this is right
- Trajectories can be queried at any continuous time with a probability distribution rather than only at discrete measurement instants.
- The same factor graph supports decentralized optimization across separate cameras or robots without a central clock.
- Rolling-shutter distortion is absorbed directly into the continuous-time model instead of requiring separate undistortion preprocessing.
- Hyperparameters of the motion prior can be learned from data inside the same inference procedure.
Where Pith is reading between the lines
- The same message-passing structure might allow incremental addition of new sensor modalities without redesigning the entire optimizer.
- In multi-robot settings the distributed nature could reduce communication bandwidth compared with methods that require global synchronization.
- Because the GP prior is data-driven, the framework may adapt motion statistics when the robot changes environment or speed without manual retuning.
Load-bearing premise
The Gaussian Process motion prior together with GBP message passing produces consistent interpolation and accurate estimates for asynchronous heterogeneous sensors without extra modeling or post-processing steps.
What would settle it
An experiment on real rolling-shutter or event-camera sequences in which the interpolated trajectory between measurement times shows larger reprojection errors or physically implausible motion than a synchronized discrete-time baseline.
Figures

read the original abstract
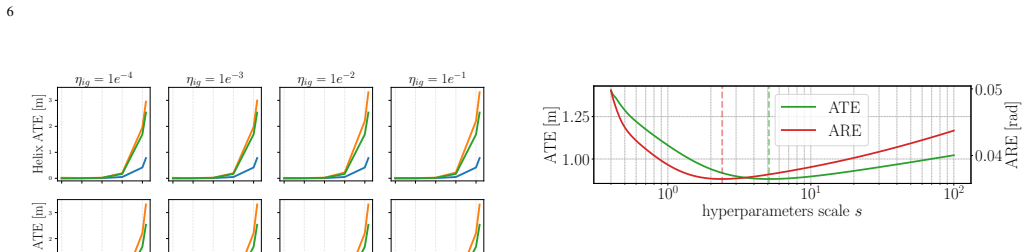
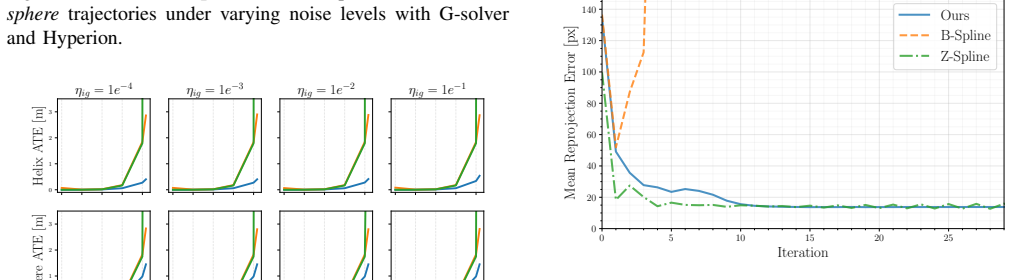
Continuous-time SLAM provides a principled framework for fusing heterogeneous sensors while estimating smooth trajectories, and is particularly well-suited for handling heterogeneous, asynchronous sensor streams with non-uniform readout patterns, such as rolling shutter cameras, LiDAR scanners, radar sweeps, or event-based sensors. In this work, we introduce G-solver, a fully Gaussian and distributed framework that combines Gaussian Belief Propagation (GBP) with Gaussian Process (GP) motion priors for continuous-time trajectory estimation. Our GP model provides a probabilistic representation of the trajectory, enabling consistent interpolation and the use of data-driven hyperparameters, while GBP offers a scalable message-passing formulation well-suited for decentralized settings. The resulting solver naturally extends to multi-camera scenarios without specialized synchronization or engineering effort. We evaluate the approach on synthetic and real data, including rolling shutter and distributed multi-camera optimization, demonstrating accurate and stable estimation with runtimes comparable to existing continuous-time methods. An open-source implementation is released.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces G-solver, a fully Gaussian distributed framework for continuous-time SLAM that combines Gaussian Belief Propagation (GBP) with Gaussian Process (GP) motion priors. It claims this enables consistent interpolation of trajectories, handles asynchronous heterogeneous sensors (e.g., rolling shutter cameras), extends naturally to multi-camera scenarios without synchronization, and yields accurate stable estimation on synthetic and real data, with runtimes comparable to existing methods and an open-source implementation released.
Significance. If the central claims hold, the work would offer a scalable message-passing formulation for decentralized continuous-time trajectory estimation that integrates data-driven GP hyperparameters and handles multi-sensor asynchrony without extra engineering. The open-source release supports reproducibility, and the GBP+GP pairing is noted as compatible with prior literature.
major comments (1)
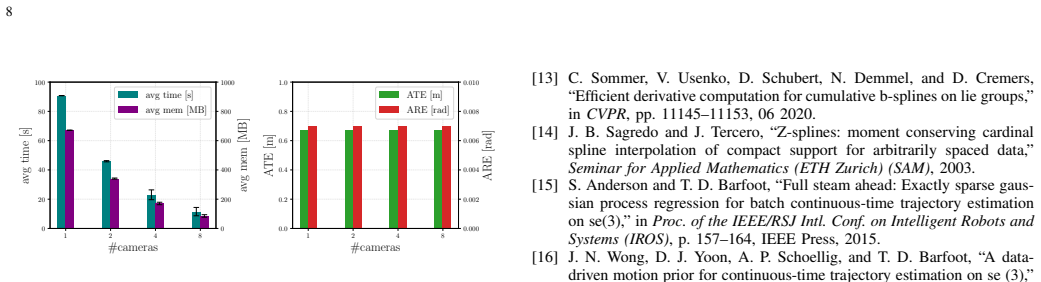
- [Abstract] Abstract: The claim of 'demonstrating accurate and stable estimation with runtimes comparable to existing continuous-time methods' on synthetic and real data (including rolling shutter and distributed multi-camera cases) is unsupported by any quantitative metrics, error bars, baseline comparisons, or derivation details; this directly undermines verification of the headline claims of consistency, stability, and practical performance.
Simulated Author's Rebuttal
We thank the referee for their review and for highlighting the need for stronger support of the abstract claims. We address the comment below and will revise the manuscript to improve verifiability of the results.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim of 'demonstrating accurate and stable estimation with runtimes comparable to existing continuous-time methods' on synthetic and real data (including rolling shutter and distributed multi-camera cases) is unsupported by any quantitative metrics, error bars, baseline comparisons, or derivation details; this directly undermines verification of the headline claims of consistency, stability, and practical performance.
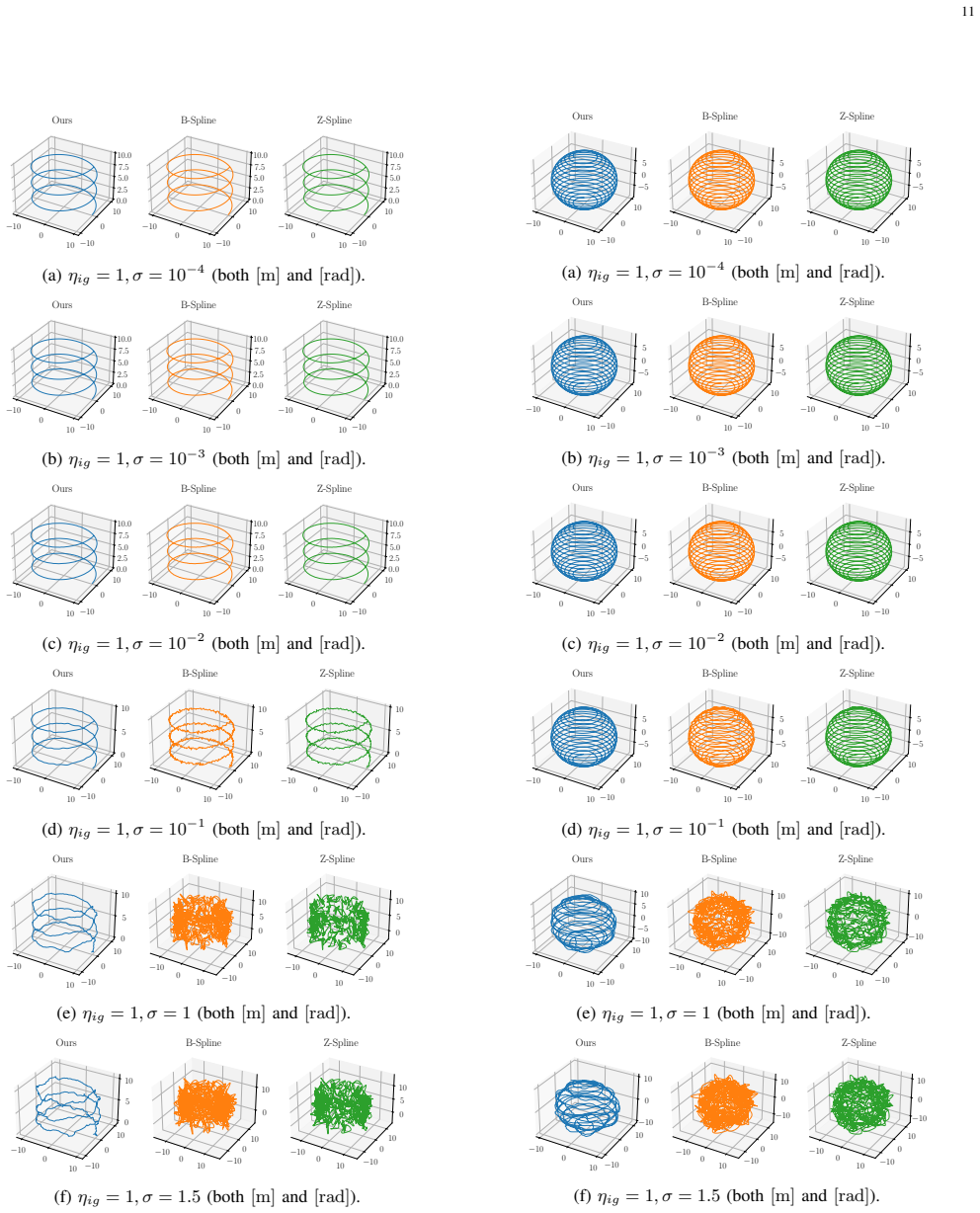
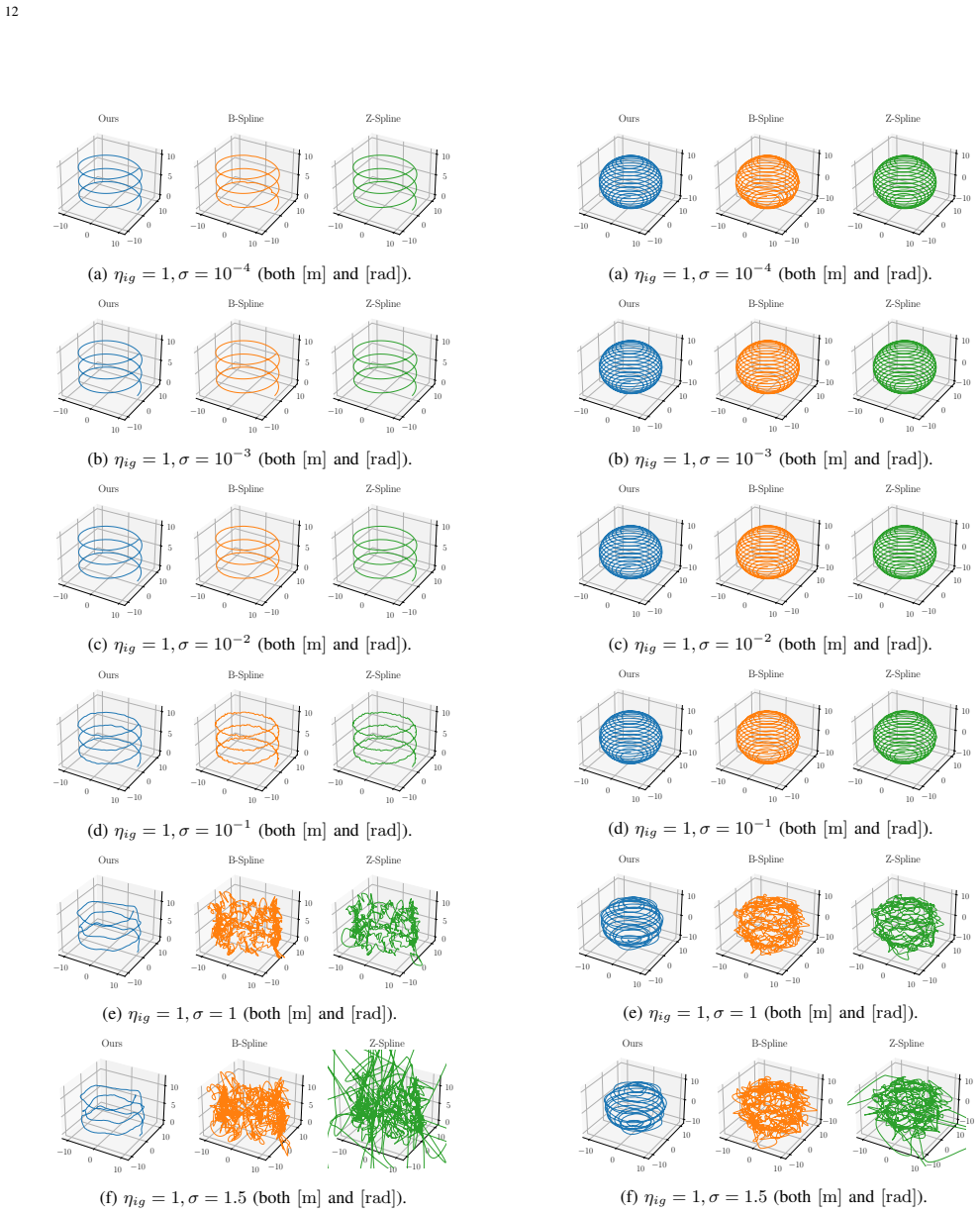
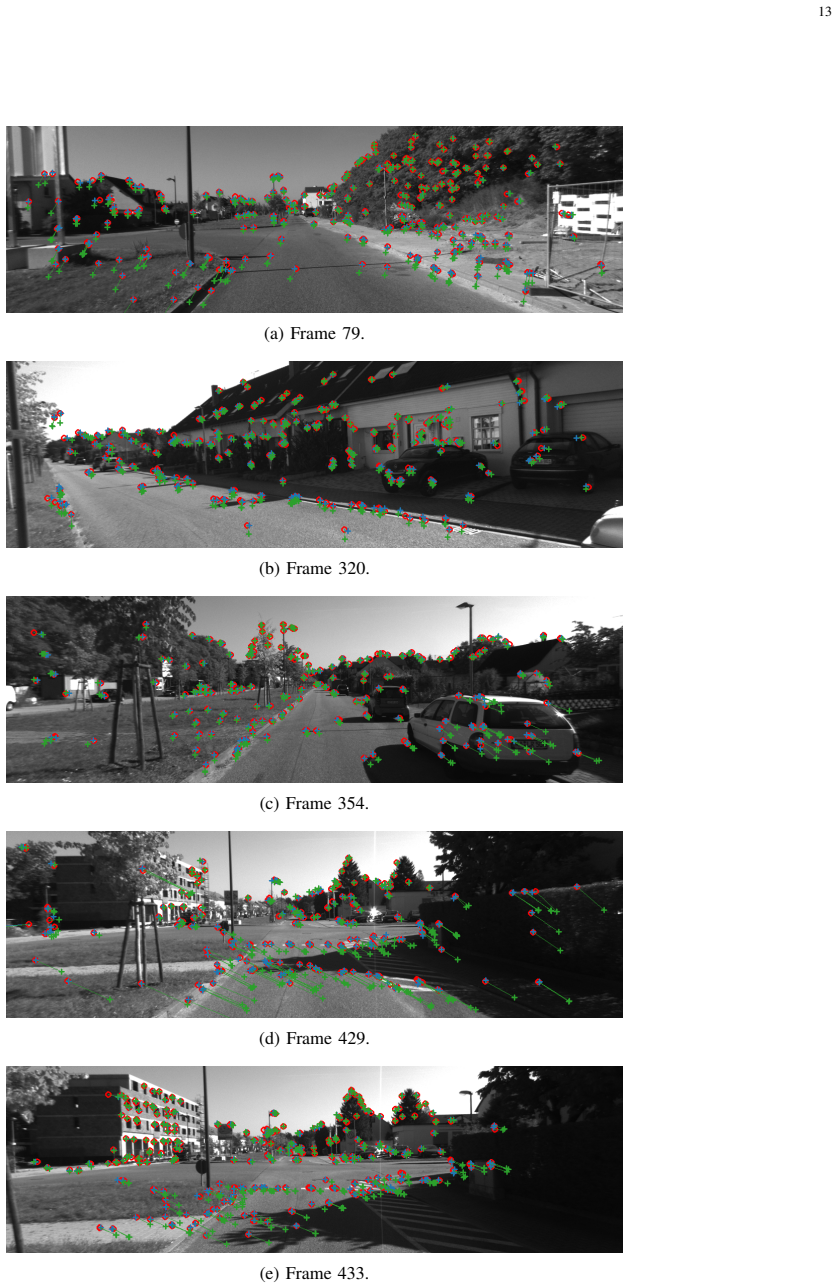
Authors: We agree that the abstract would benefit from more explicit quantitative support to allow readers to immediately verify the performance claims. The experiments section of the manuscript presents results on synthetic and real datasets (including rolling-shutter and distributed multi-camera cases) with trajectory estimates, runtime measurements, and comparisons to existing continuous-time approaches. To directly address the concern, we will revise the abstract to incorporate key quantitative highlights (e.g., specific error values and runtime ratios relative to baselines) drawn from the experiments, and we will ensure the experiments section includes error bars, tabulated baseline comparisons, and clearer derivation details for the reported metrics. These changes will be incorporated in the revised manuscript. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper introduces G-solver as a new construction combining established GBP message passing with GP motion priors for continuous-time trajectory estimation. No load-bearing step reduces a claimed prediction or uniqueness result to a fitted input, self-definition, or self-citation chain by construction; the abstract and contributions frame the integration as an independent extension to distributed multi-camera settings without invoking prior author work to forbid alternatives or smuggle ansatzes. The framework is presented as self-contained against external benchmarks, with evaluation on synthetic and real data serving as independent validation rather than tautological confirmation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Gaussian Process motion priors provide a probabilistic representation enabling consistent interpolation
- domain assumption Gaussian Belief Propagation offers a scalable message-passing formulation suitable for decentralized settings
Reference graph
Works this paper leans on
-
[1]
Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. Montiel, and J. D. Tard´os, “Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,”IEEE Trans. on Robotics, vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[2]
Mast3r-slam: Real-time dense slam with 3d reconstruction priors,
R. Murai, E. Dexheimer, and A. J. Davison, “Mast3r-slam: Real-time dense slam with 3d reconstruction priors,” inCVPR, pp. 16695–16705, 2025
2025
-
[3]
Deep patch visual slam,
L. Lipson, Z. Teed, and J. Deng, “Deep patch visual slam,” inECCV, pp. 424–440, Springer, 2024
2024
-
[4]
Batch continuous-time trajectory estimation as exactly sparse gaussian process regression,
T. D. Barfoot, C. H. Tong, and S. S ¨arkk¨a, “Batch continuous-time trajectory estimation as exactly sparse gaussian process regression,” in Proc. of Robotics: Science and Systems (RSS), 2014
2014
-
[5]
Continuous-time state estimation methods in robotics: A survey,
W. Talbot, J. Nubert, T. Tuna, C. Cadena, F. D ¨umbgen, J. Tordesillas, T. D. Barfoot, and M. Hutter, “Continuous-time state estimation methods in robotics: A survey,”IEEE Trans. on Robotics, 2025
2025
-
[6]
Ortiz,Gaussian Belief Propagation for Real-time Decentralised In- ference
J. Ortiz,Gaussian Belief Propagation for Real-time Decentralised In- ference. Imperial College London, 2023
2023
-
[7]
Uncertainty-driven 6d pose estimation of objects and scenes from a single rgb image,
E. Brachmann, F. Michel, A. Krull, M. Y . Yang, S. Gumhold, and C. Rother, “Uncertainty-driven 6d pose estimation of objects and scenes from a single rgb image,” inCVPR, pp. 3364–3372, 06 2016
2016
-
[8]
Bundle adjustment - a modern synthesis,
B. Triggs, P. F. McLauchlan, R. I. Hartley, and A. W. Fitzgibbon, “Bundle adjustment - a modern synthesis,” inICCV, ICCV ’99, pp. 298– 372, Springer-Verlag, 2000
2000
-
[9]
Lsd-slam: Large-scale direct monocular slam,
J. Engel, T. Sch ¨ops, and D. Cremers, “Lsd-slam: Large-scale direct monocular slam,” inECCV, pp. 834–849, 2014
2014
-
[10]
Adaptive mobile robot navigation and mapping,
H. J. S. Feder, J. J. Leonard, and C. M. Smith, “Adaptive mobile robot navigation and mapping,”Int. J. Robotic Res., vol. 18, no. 7, pp. 650– 668, 1999
1999
-
[11]
Ceres Solver,
S. Agarwal, K. Mierle, and T. C. S. Team, “Ceres Solver,” 10 2023
2023
-
[12]
G2o: A general framework for graph optimization.,
R. K ¨ummerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, “G2o: A general framework for graph optimization.,” inProc. of the IEEE Intl. Conf. on Robotics Automation (ICRA), pp. 3607–3613, IEEE, 2011
2011
-
[13]
Efficient derivative computation for cumulative b-splines on lie groups,
C. Sommer, V . Usenko, D. Schubert, N. Demmel, and D. Cremers, “Efficient derivative computation for cumulative b-splines on lie groups,” inCVPR, pp. 11145–11153, 06 2020
2020
-
[14]
Z-splines: moment conserving cardinal spline interpolation of compact support for arbitrarily spaced data,
J. B. Sagredo and J. Tercero, “Z-splines: moment conserving cardinal spline interpolation of compact support for arbitrarily spaced data,” Seminar for Applied Mathematics (ETH Zurich) (SAM), 2003
2003
-
[15]
Full steam ahead: Exactly sparse gaus- sian process regression for batch continuous-time trajectory estimation on se(3),
S. Anderson and T. D. Barfoot, “Full steam ahead: Exactly sparse gaus- sian process regression for batch continuous-time trajectory estimation on se(3),” inProc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), p. 157–164, IEEE Press, 2015
2015
-
[16]
A data- driven motion prior for continuous-time trajectory estimation on se (3),
J. N. Wong, D. J. Yoon, A. P. Schoellig, and T. D. Barfoot, “A data- driven motion prior for continuous-time trajectory estimation on se (3),” IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 2, pp. 1429– 1436, 2020
2020
-
[17]
Vari- ational inference with parameter learning applied to vehicle trajectory estimation,
J. N. Wong, D. J. Yoon, A. P. Schoellig, and T. D. Barfoot, “Vari- ational inference with parameter learning applied to vehicle trajectory estimation,”IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 4, pp. 5291–5298, 2020
2020
-
[18]
Continuous-time trajectory estimation: A comparative study between gaussian process and spline-based approaches,
J. Johnson, J. Mangelson, T. Barfoot, and R. Beard, “Continuous-time trajectory estimation: A comparative study between gaussian process and spline-based approaches,” 2024
2024
-
[19]
Mast3r-sfm: a fully-integrated solution for unconstrained structure-from-motion,
B. P. Duisterhof, L. Zust, P. Weinzaepfel, V . Leroy, Y . Cabon, and J. Revaud, “Mast3r-sfm: a fully-integrated solution for unconstrained structure-from-motion,” inProc. of the International Conference on 3D Vision (3DV), pp. 1–10, IEEE, 2025
2025
-
[20]
Data-efficient collaborative decentralized thermal-inertial odometry,
V . Polizzi, R. Hewitt, J. Hidalgo-Carri ´o, J. Delaune, and D. Scaramuzza, “Data-efficient collaborative decentralized thermal-inertial odometry,” IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 4, pp. 10681– 10688, 2022
2022
-
[21]
C. M. Bishop,Pattern Recognition and Machine Learning (Information Science and Statistics). Berlin, Heidelberg: Springer-Verlag, 2006
2006
-
[22]
Gaussian Belief Propagation: Theory and Aplication
D. Bickson, “Gaussian belief propagation: Theory and aplication,” CoRR, vol. abs/0811.2518, 2008
work page internal anchor Pith review Pith/arXiv arXiv 2008
-
[23]
Convergence analysis of distributed inference with vector-valued gaussian belief propagation,
J. Du, S. Ma, Y .-C. Wu, S. Kar, and J. M. F. Moura, “Convergence analysis of distributed inference with vector-valued gaussian belief propagation,”Journal of Machine Learning Research, vol. 18, no. 172, pp. 1–38, 2018
2018
-
[24]
Futuremapping: The computational structure of spatial ai systems,
A. Davison, “Futuremapping: The computational structure of spatial ai systems,”CoRR, 03 2018
2018
-
[25]
Futuremapping 2: Gaussian belief propagation for spatial ai,
A. Davison and J. Ortiz, “Futuremapping 2: Gaussian belief propagation for spatial ai,” 10 2019
2019
-
[26]
Hyperion – a fast, versatile symbolic gaussian belief propagation framework for continuous-time slam,
D. Hug, I. Alzugaray, and M. Chli, “Hyperion – a fast, versatile symbolic gaussian belief propagation framework for continuous-time slam,” in ECCV, (Berlin, Heidelberg), p. 215–231, Springer-Verlag, 2024
2024
-
[27]
Integrating generic sensor fusion algorithms with sound state representations through encap- sulation of manifolds,
C. Hertzberg, R. Wagner, U. Frese, and L. Schr ¨oder, “Integrating generic sensor fusion algorithms with sound state representations through encap- sulation of manifolds,”Information Fusion, vol. 14, no. 1, pp. 57–77, 2013
2013
-
[28]
Sparse gaussian processes on matrix lie groups: A unified framework for optimizing continuous-time trajectories,
J. Dong, M. Mukadam, B. Boots, and F. Dellaert, “Sparse gaussian processes on matrix lie groups: A unified framework for optimizing continuous-time trajectories,” inProc. of the IEEE Intl. Conf. on Robotics Automation (ICRA), pp. 6497–6504, 2018
2018
-
[29]
Batch nonlinear continuous-time trajectory estimation as exactly sparse gaussian process regression,
S. Anderson, T. D. Barfoot, C. H. Tong, and S. S ¨arkk¨a, “Batch nonlinear continuous-time trajectory estimation as exactly sparse gaussian process regression,”Autonomous Robots, vol. 39, pp. 221–238, 2015
2015
-
[30]
Message-passing for approximate map inference with latent variables,
J. Jiang, P. Rai, and H. Daume, “Message-passing for approximate map inference with latent variables,” inNeurIPS(J. Shawe-Taylor, R. Zemel, P. Bartlett, F. Pereira, and K. Weinberger, eds.), vol. 24, Curran Associates, Inc., 2011
2011
-
[31]
T. D. Barfoot,State estimation for robotics. Cambridge University Press, 2024
2024
-
[32]
A micro lie theory for state estimation in robotics,
J. Sola, J. Deray, and D. Atchuthan, “A micro lie theory for state estimation in robotics,”arXiv preprint arXiv:1812.01537, 2018
-
[33]
Ucoslam: Simultaneous localization and mapping by fusion of keypoints and squared planar markers,
R. Munoz-Salinas and R. Medina-Carnicer, “Ucoslam: Simultaneous localization and mapping by fusion of keypoints and squared planar markers,”PR, vol. 101, p. 107193, 2020
2020
-
[34]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,”Int. J. Robotic Res., vol. 32, no. 11, pp. 1231–1237, 2013. 9 VI. SUPPLEMENTARYMATERIAL This section provides additional details to complement the main paper. We include a complete description of the inference components used in our framework, extended qualitative r...
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.