RiskFlow: Fast and Faithful Safety-Critical Traffic Scenario Generation
Pith reviewed 2026-06-28 01:21 UTC · model grok-4.3
The pith
RiskFlow replaces iterative denoising with a single forward pass through a learned action-space velocity field to generate realistic safety-critical traffic scenarios.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
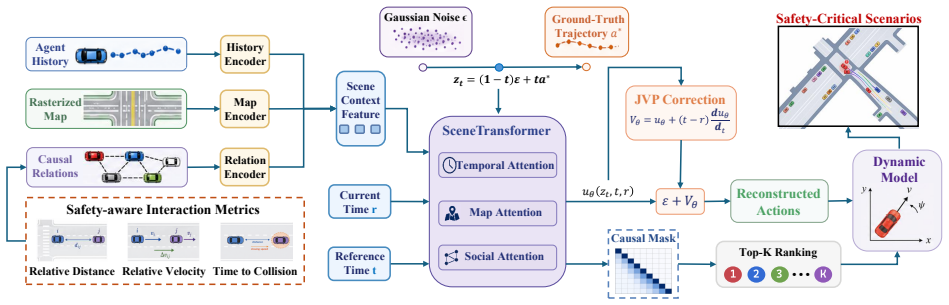
RiskFlow formulates future trajectory generation as transport in the action space. It learns an average velocity field over a finite interval to transform Gaussian action sequences into future acceleration and yaw-rate commands with a single forward pass using a JVP-based objective for training. At test time it applies output-space guidance to steer selected critical agents toward risky interactions while regularizing off-road behavior, then reconstructs physically feasible trajectories through vehicle dynamics.
What carries the argument
Average velocity field in action space that maps Gaussian sequences to acceleration and yaw-rate commands in one forward pass, trained with JVP objective and combined with output-space guidance.
If this is right
- RiskFlow achieves a strong adversariality-realism trade-off across multi-agent and long-horizon settings.
- The method improves realism while maintaining competitive safety-critical generation capability.
- Inference time for evaluation is substantially reduced compared with representative diffusion baselines.
- Output-space guidance steers agents toward risky interactions without introducing off-road artifacts.
Where Pith is reading between the lines
- The single-pass formulation may extend naturally to other closed-loop simulation domains that require fast multi-agent rollouts under constraints.
- Output-space guidance could be generalized to enforce additional domain rules such as lane adherence or speed limits beyond the off-road regularizer shown.
- Testing the velocity field on datasets with different traffic densities or sensor modalities would clarify whether the one-pass stability holds beyond nuScenes.
Load-bearing premise
A single forward pass through the learned velocity field plus output-space guidance produces physically feasible trajectories without the error accumulation of iterative denoising.
What would settle it
Running long-horizon closed-loop generations with RiskFlow on nuScenes and measuring whether rates of jitter, abnormal acceleration, or off-road events exceed those of diffusion baselines would falsify the feasibility claim.
Figures
read the original abstract
Safety-critical traffic scenario generation is essential for evaluating autonomous driving systems under rare but high-risk interactions. Existing diffusion-based methods offer strong controllability in closed-loop generation, but their iterative denoising process is computationally expensive and may accumulate sampling and guidance errors over long rollouts, causing unrealistic motion artifacts such as jitter, abnormal acceleration, and off-road behavior. To address these issues, we propose RiskFlow, a closed-loop safety-critical multi-agent traffic generation framework that formulates future trajectory generation as transport in the action space. Instead of relying on iterative denoising, RiskFlow learns an average velocity field over a finite interval to transform Gaussian action sequences into future acceleration and yaw-rate commands with a single forward pass, using a JVP-based objective for efficient and stable training. At test time, RiskFlow applies output-space guidance to the generated actions, steering selected critical agents toward risky interactions while regularizing off-road behavior, and reconstructs physically feasible trajectories through vehicle dynamics. Experiments on nuScenes with tbsim closed-loop evaluation show that RiskFlow achieves a strong adversariality-realism trade-off across multi-agent and long-horizon settings. Compared with representative baselines, RiskFlow consistently improves realism while maintaining competitive safety-critical generation capability, and substantially reduces inference time for evaluation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes RiskFlow, a closed-loop framework for safety-critical multi-agent traffic scenario generation that formulates trajectory generation as transport in action space. It learns an average velocity field over a finite interval to map Gaussian action sequences to acceleration and yaw-rate commands via a single forward pass (using a JVP-based objective for training), applies output-space guidance at test time to steer critical agents toward risky interactions while regularizing off-road behavior, and reconstructs trajectories using vehicle dynamics. Experiments on nuScenes with tbsim closed-loop evaluation claim improved realism, competitive adversariality, and substantially reduced inference time relative to diffusion baselines across multi-agent and long-horizon settings.
Significance. If the central claims hold, RiskFlow would offer a computationally efficient alternative to iterative diffusion methods for generating realistic adversarial traffic scenarios, with potential value for AV safety evaluation. The single-pass design and reported inference-time gains address a practical bottleneck, and the closed-loop tbsim evaluation provides a relevant testbed; however, the significance is tempered by the need to confirm that the velocity-field approach avoids the artifacts it attributes to diffusion.
major comments (2)
- [Abstract / Methods description] The central claim that a single forward pass through the learned average velocity field (with JVP objective) plus output-space guidance yields physically feasible long-horizon trajectories without jitter, abnormal acceleration, or off-road artifacts (unlike iterative denoising) is load-bearing for the reported realism and tbsim gains, yet the abstract provides no concrete justification or ablation showing that the finite-interval average approximation suffices to capture multi-agent interaction dynamics.
- [Experiments] The experimental claims of a strong adversariality-realism trade-off and consistent improvements over baselines rest on tbsim closed-loop metrics, but without quantitative details on how the output-space guidance regularizes feasibility or on error accumulation comparisons, it is unclear whether the reported gains follow from the proposed mechanism or from other factors.
minor comments (2)
- [Abstract] The abstract would benefit from explicit mention of the number of agents, horizon lengths, and specific baseline methods compared.
- [Methods] Notation for the velocity field, JVP objective, and action-space transformation should be introduced with equations for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate the revisions we will make to improve clarity and strengthen the supporting evidence.
read point-by-point responses
-
Referee: [Abstract / Methods description] The central claim that a single forward pass through the learned average velocity field (with JVP objective) plus output-space guidance yields physically feasible long-horizon trajectories without jitter, abnormal acceleration, or off-road artifacts (unlike iterative denoising) is load-bearing for the reported realism and tbsim gains, yet the abstract provides no concrete justification or ablation showing that the finite-interval average approximation suffices to capture multi-agent interaction dynamics.
Authors: We agree the abstract is concise and does not explicitly justify the finite-interval approximation. Section 3 derives the average velocity field over a finite interval and the JVP objective as an efficient transport map that incorporates multi-agent interactions via the learned field; the closed-loop tbsim results then validate that this yields feasible trajectories. To address the concern directly, we will revise the abstract to include a short statement referencing the finite-interval formulation and its empirical validation in the closed-loop setting. We will also add a targeted ablation on interval length to the experiments or supplementary material. revision: yes
-
Referee: [Experiments] The experimental claims of a strong adversariality-realism trade-off and consistent improvements over baselines rest on tbsim closed-loop metrics, but without quantitative details on how the output-space guidance regularizes feasibility or on error accumulation comparisons, it is unclear whether the reported gains follow from the proposed mechanism or from other factors.
Authors: We acknowledge that the current presentation of the output-space guidance (Section 4) and the aggregate tbsim metrics leave the regularization and error-accumulation effects implicit. The guidance includes an explicit off-road penalty term, and the single-pass design is intended to limit accumulation relative to iterative methods, but additional quantitative breakdowns would make the mechanism clearer. We will add (i) a table or plot quantifying off-road violation rates with and without the regularization term and (ii) horizon-wise comparisons of acceleration variance and smoothness metrics against the diffusion baselines to isolate the contribution of the proposed approach. revision: yes
Circularity Check
No circularity in derivation chain; method is independently specified
full rationale
The paper presents RiskFlow as a new formulation of trajectory generation as transport in action space, with an average velocity field learned via a JVP-based objective for single-forward-pass transformation of Gaussian sequences, followed by output-space guidance and vehicle-dynamics reconstruction. No quoted equations or steps reduce any claimed prediction or result to a fitted input by construction, self-definition, or load-bearing self-citation. The central claims rest on the explicit training objective and guidance mechanism as alternatives to iterative denoising, with no reduction to prior author results or renaming of known patterns. This is the common case of a self-contained methodological proposal.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Transportation research part A: policy and practice , volume=
Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? , author=. Transportation research part A: policy and practice , volume=. 2016 , publisher=
2016
-
[2]
IEEE Transactions on Intelligent Transportation Systems , volume=
A survey on safety-critical driving scenario generation—a methodological perspective , author=. IEEE Transactions on Intelligent Transportation Systems , volume=. 2023 , publisher=
2023
-
[3]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
nuscenes: A multimodal dataset for autonomous driving , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[4]
2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Simnet: Learning reactive self-driving simulations from real-world observations , author=. 2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2021 , organization=
2021
-
[5]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Trafficsim: Learning to simulate realistic multi-agent behaviors , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[6]
2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=
BITS: Bi-level Imitation for Traffic Simulation , author=. 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2023 , organization=
2023
-
[7]
Advances in neural information processing systems , volume=
Denoising diffusion probabilistic models , author=. Advances in neural information processing systems , volume=
-
[8]
Denoising Diffusion Implicit Models
Denoising diffusion implicit models , author=. arXiv preprint arXiv:2010.02502 , year=
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[9]
Advances in Neural Information Processing Systems , volume=
Scenario diffusion: Controllable driving scenario generation with diffusion , author=. Advances in Neural Information Processing Systems , volume=
-
[10]
2023 IEEE international conference on robotics and automation (ICRA) , pages=
Guided conditional diffusion for controllable traffic simulation , author=. 2023 IEEE international conference on robotics and automation (ICRA) , pages=. 2023 , organization=
2023
-
[11]
Conference on robot learning , pages=
Language-guided traffic simulation via scene-level diffusion , author=. Conference on robot learning , pages=. 2023 , organization=
2023
-
[12]
European conference on computer vision , pages=
Safe-sim: Safety-critical closed-loop traffic simulation with diffusion-controllable adversaries , author=. European conference on computer vision , pages=. 2024 , organization=
2024
-
[13]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Causal composition diffusion model for closed-loop traffic generation , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[14]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Generating useful accident-prone driving scenarios via a learned traffic prior , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
- [15]
-
[16]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Query-centric trajectory prediction , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[17]
2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Wayformer: Motion Forecasting via Simple & Efficient Attention Networks , author=. 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2023 , organization=
2023
-
[18]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
Towards robust and adaptive motion forecasting: A causal representation perspective , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[19]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Human trajectory prediction via counterfactual analysis , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[20]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Causal intervention for human trajectory prediction with cross attention mechanism , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[21]
Advances in neural information processing systems , volume=
Generative modeling by estimating gradients of the data distribution , author=. Advances in neural information processing systems , volume=
-
[22]
Classifier-Free Diffusion Guidance
Classifier-free diffusion guidance , author=. arXiv preprint arXiv:2207.12598 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Motiondiffuser: Controllable multi-agent motion prediction using diffusion , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[24]
Advances in Neural Information Processing Systems , volume=
Scenediffuser: Efficient and controllable driving simulation initialization and rollout , author=. Advances in Neural Information Processing Systems , volume=
-
[25]
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Advdiffuser: Generating adversarial safety-critical driving scenarios via guided diffusion , author=. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2024 , organization=
2024
-
[26]
Advances in Neural Information Processing Systems , volume=
Mean flows for one-step generative modeling , author=. Advances in Neural Information Processing Systems , volume=
-
[27]
Improved Mean Flows: On the Challenges of Fastforward Generative Models
Improved mean flows: On the challenges of fastforward generative models , author=. arXiv preprint arXiv:2512.02012 , year=
work page internal anchor Pith review Pith/arXiv arXiv
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.