RPC-GS: Gaussian Splatting with native RPC Rendering for Satellite Imagery
Pith reviewed 2026-06-28 01:44 UTC · model grok-4.3
The pith
Native RPC rendering in Gaussian Splatting cuts mean altitude error in satellite reconstruction by 29.6 to 63.8 percent over camera approximations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
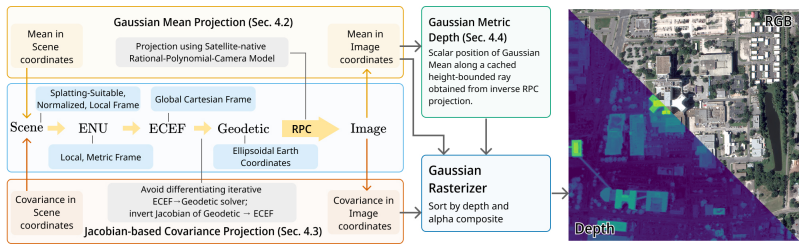
RPC-GS projects Gaussian means and covariances directly through the Rational Polynomial Camera model during splatting by embedding the RPC inside a selected chain of geo-coordinate transformations and applying a numerically robust Jacobian-based covariance projection to handle the partially nonlinear mapping; a metric ray-based depth formulation replaces the missing explicit depth, yielding lower reconstruction error than perspective or affine approximations on the tested satellite datasets.
What carries the argument
The native RPC renderer that maps Gaussians through the Rational Polynomial Camera via geo-coordinate transformations and Jacobian covariance projection.
If this is right
- Satellite 3D reconstructions can avoid systematic geometric distortion introduced by camera-model approximations.
- Mean altitude accuracy improves by the reported margins on the two leading benchmark collections.
- A single code base now supports direct comparison of RPC, perspective, and affine models inside Gaussian Splatting.
- Future satellite Gaussian Splatting work can start from an RPC-native rather than approximated baseline.
Where Pith is reading between the lines
- The same transformation-chain approach could be tested on other polynomial or pushbroom camera models used outside optical satellites.
- Higher geometric fidelity may improve fusion of satellite point clouds with ground-based or aerial data.
- Operational pipelines that ingest RPC-tagged imagery could adopt the renderer without an intermediate camera conversion step.
Load-bearing premise
The chain of geo-coordinate transformations and the derived Jacobian-based covariance projection remain numerically stable and do not add geometric error when applied to the partially nonlinear RPC model.
What would settle it
A controlled re-run on DFC2019 or IARPA2016 in which the native RPC renderer produces higher mean altitude or overall reconstruction error than the perspective or affine baselines would falsify the central performance claim.
Figures
read the original abstract
We present RPC-GS, the first Gaussian Splatting framework for satellite imagery that operates natively with Rational Polynomial Camera (RPC) models. The RPC model is the de facto standard for representing the complex imaging geometry of modern pushbroom satellite sensors. To simplify rendering, prior satellite Gaussian Splatting methods replace the RPC model with perspective or affine camera approximations, leading to geometric errors during reconstruction. RPC-GS avoids these approximations by projecting Gaussian means and covariances directly through the RPC model during the splatting process. We embed the RPC model in a chain of carefully selected geo-coordinate transformations representing a mapping from splatting-suitable scene coordinates to image coordinates. To map the Gaussian covariance matrices, we derive a numerically robust Jacobian-based covariance projection for the (partially nonlinear) coordinate transformations. Since RPCs lack an explicit notion of camera depth, we integrate a metric ray-based depth formulation. We benchmark RPC, perspective, and affine camera models in a unified framework, with our native RPC renderer consistently achieving the lowest reconstruction error on leading satellite benchmark datasets, improving mean altitude error over perspective and affine approximations by 29.6% and 63.8% on DFC2019, and by 9.9% and 37.9% on IARPA2016. We release our code to support future research of Gaussian Splatting in the satellite imaging domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents RPC-GS, the first Gaussian Splatting method for satellite imagery that operates natively with Rational Polynomial Camera (RPC) models rather than perspective or affine approximations. It embeds the RPC model within a chain of geo-coordinate transformations, derives a Jacobian-based covariance projection for the partially nonlinear mappings, introduces a metric ray-based depth formulation, and reports quantitative improvements in mean altitude error (29.6% and 63.8% over perspective/affine on DFC2019; 9.9% and 37.9% on IARPA2016) with code release.
Significance. If the derivations hold, the work is significant for enabling accurate 3D reconstruction from pushbroom satellite sensors without approximation-induced geometric errors, a common limitation in prior satellite GS methods. The benchmark gains on standard datasets and explicit code release strengthen reproducibility and potential impact in remote sensing applications.
major comments (2)
- [§3.2] §3.2 (Jacobian covariance projection): the derivation claims numerical robustness for the partially nonlinear RPC chain, but the manuscript provides no accompanying sensitivity analysis, condition-number bounds, or Monte-Carlo perturbation tests; this directly supports the central claim of preserved geometric fidelity and the reported error reductions.
- [§4.1] §4.1 (metric depth formulation): the ray-based depth lacks an explicit comparison to ground-truth LiDAR depths on the evaluation scenes, leaving open whether the formulation introduces systematic bias that could partially explain the altitude-error gains.
minor comments (2)
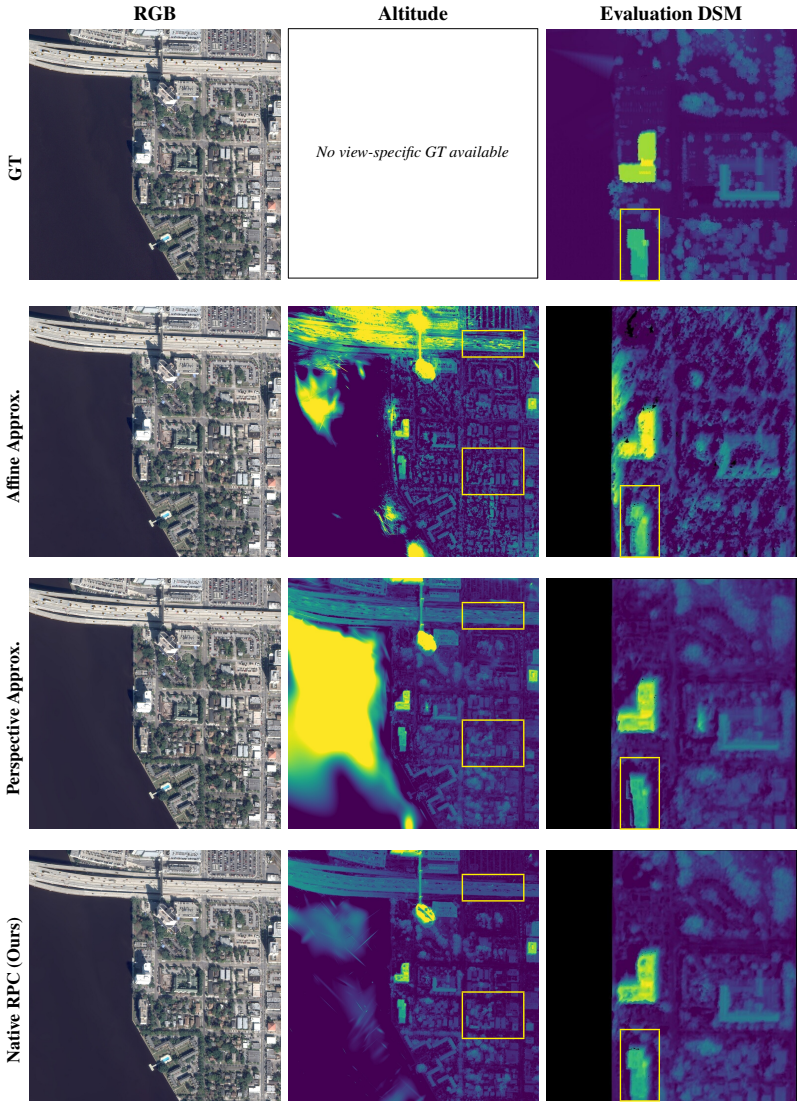
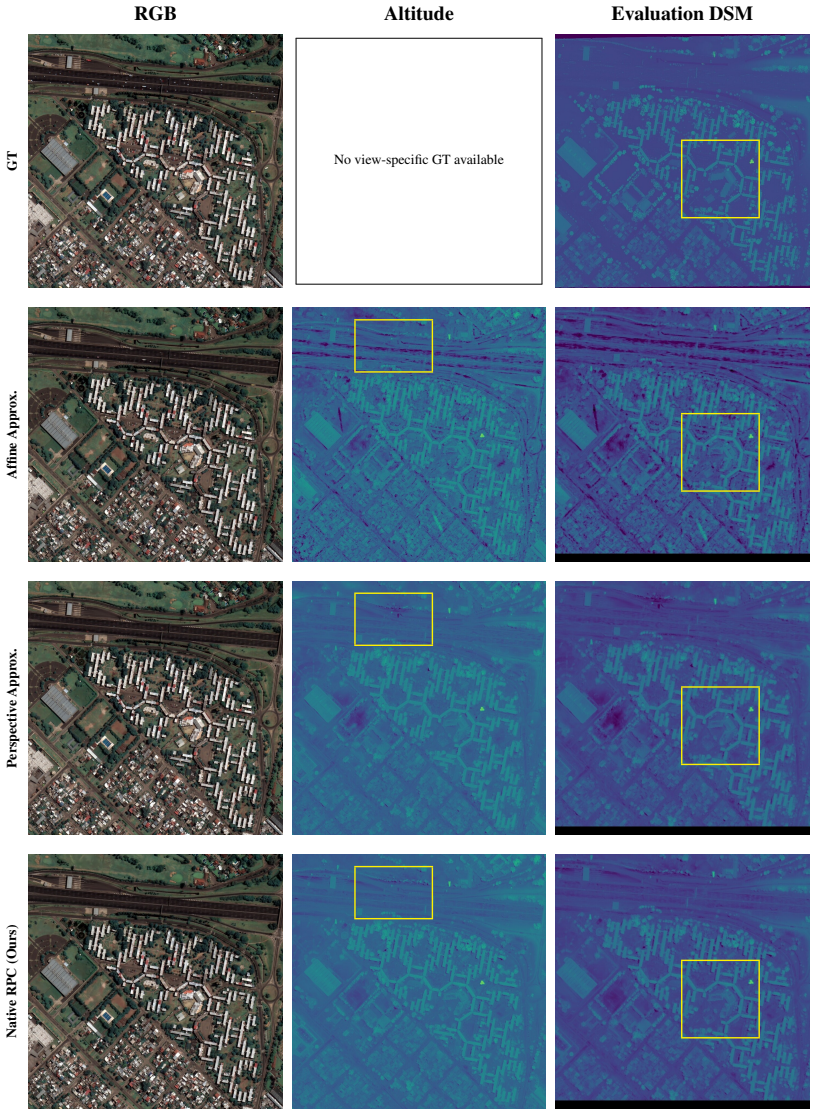
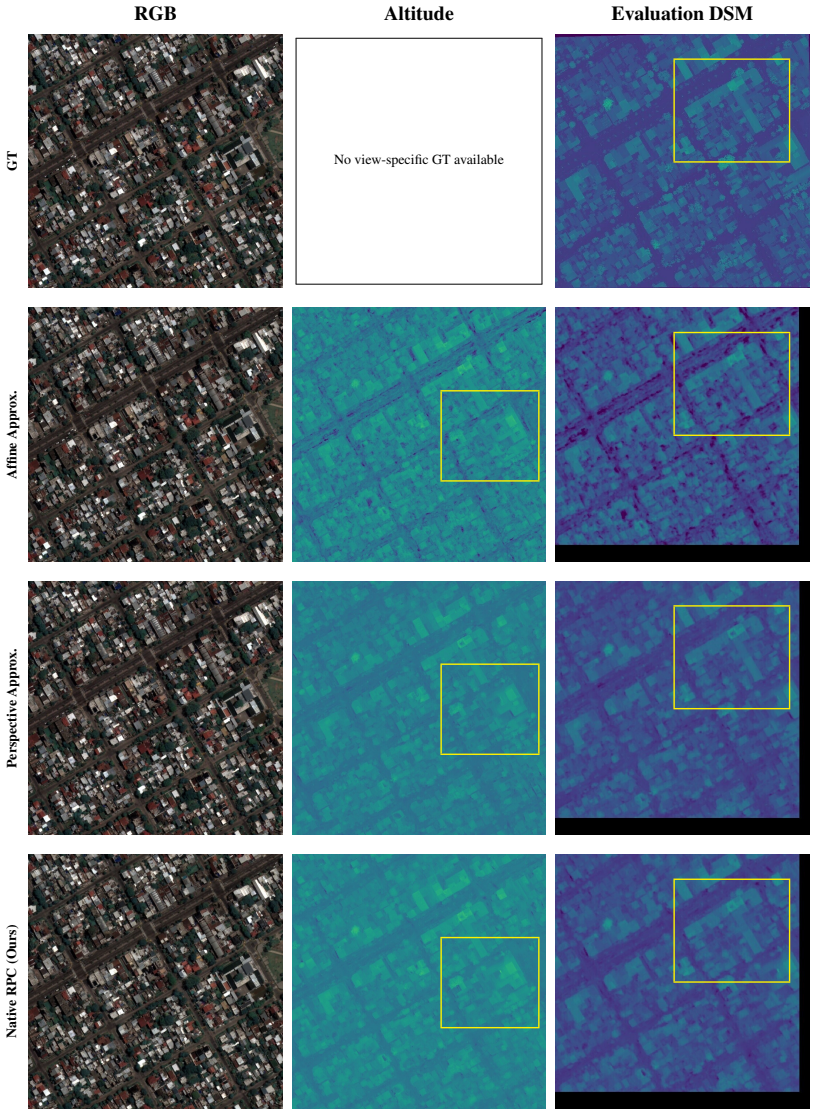
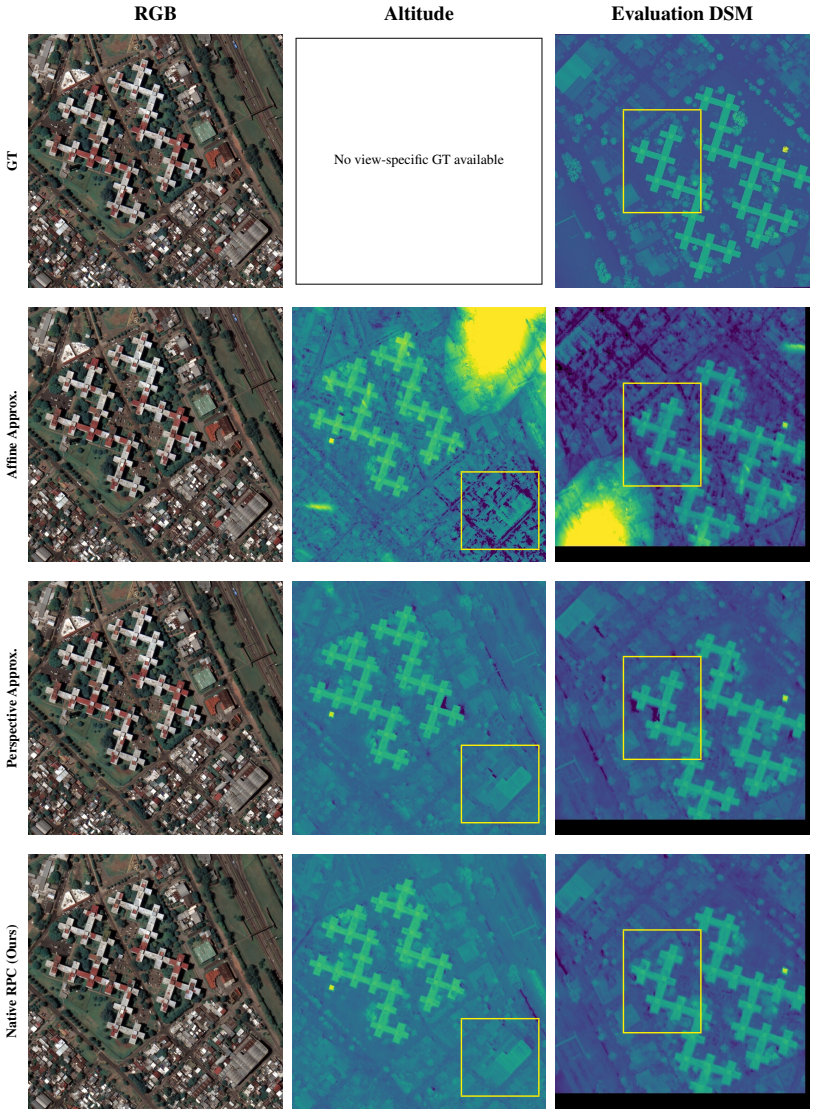
- [Figure 3] Figure 3: the covariance projection visualization would benefit from an overlay of the approximated vs. native RPC splats to illustrate the geometric difference.
- [Table 2] Table 2: the caption should explicitly state whether the reported metrics are averaged over all scenes or per-scene medians.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and positive assessment of the significance of RPC-GS. We address each major comment point-by-point below.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Jacobian covariance projection): the derivation claims numerical robustness for the partially nonlinear RPC chain, but the manuscript provides no accompanying sensitivity analysis, condition-number bounds, or Monte-Carlo perturbation tests; this directly supports the central claim of preserved geometric fidelity and the reported error reductions.
Authors: We agree that additional empirical support for numerical robustness would strengthen the central claim. In the revised manuscript we will augment §3.2 with a sensitivity analysis that includes Monte-Carlo perturbation tests on the RPC parameters and coordinate transformations, together with reported condition numbers of the Jacobians evaluated on the benchmark scenes. revision: yes
-
Referee: [§4.1] §4.1 (metric depth formulation): the ray-based depth lacks an explicit comparison to ground-truth LiDAR depths on the evaluation scenes, leaving open whether the formulation introduces systematic bias that could partially explain the altitude-error gains.
Authors: The reported altitude errors are computed directly against the high-accuracy DSM ground truth released with DFC2019 and IARPA2016; these DSMs constitute the standard evaluation protocol for the datasets. Because the benchmarks supply raster DSMs rather than raw LiDAR point clouds, a direct LiDAR comparison is not feasible within the existing evaluation protocol. We will nevertheless add a short discussion in §4.1 clarifying that the ray-based depth is derived from the same RPC geometry used for projection and therefore cannot introduce an independent systematic bias that would explain the observed gains relative to the perspective and affine baselines (which employ identical depth handling within the unified framework). revision: partial
Circularity Check
No significant circularity
full rationale
The paper's central contribution is an implementation of Gaussian Splatting that projects means and covariances through an explicit chain of geo-coordinate transformations ending in the RPC model, together with a derived Jacobian for covariance propagation and a ray-based depth formulation. These steps are presented as engineering derivations rather than fitted parameters or self-referential definitions. The reported error reductions (29.6 % / 63.8 % on DFC2019, 9.9 % / 37.9 % on IARPA2016) are obtained by direct comparison against perspective and affine baselines on two external public benchmark datasets; no quantity in the evaluation is defined in terms of the method's own outputs or prior self-citations. No self-definitional, fitted-input, or uniqueness-via-self-citation patterns appear in the abstract or method description.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Jacobian-based linearization is sufficient to propagate Gaussian covariances through the partially nonlinear RPC coordinate chain
- domain assumption A metric ray-based depth can be substituted for the missing explicit depth in the RPC model without altering the splatting geometry
Reference graph
Works this paper leans on
-
[1]
Gaussian splatting for efficient satellite image photogrammetry.2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 5959–5969,
Luca Savant Aira, Gabriele Facciolo, and Thibaud Ehret. Gaussian splatting for efficient satellite image photogrammetry.2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 5959–5969,
2025
-
[2]
Pierrick Bournez, Luca Savant Aira, Thibaud Ehret, and Gabriele Facciolo
doi: 10.1109/AIPR.2016.8010543. Pierrick Bournez, Luca Savant Aira, Thibaud Ehret, and Gabriele Facciolo. Eogs++: Earth observation gaussian splatting with internal camera refinement and direct panchromatic rendering.ArXiv, abs/2511.16542,
-
[3]
URLhttps://arxiv.org/abs/2102.02502. Tom G. Farr, Paul A. Rosen, Edward Caro, Robert Crippen, Riley Duren, Scott Hensley, Michael Kobrick, Mimi Paller, Ernesto Rodriguez, Ladislav Roth, David Seal, Scott Shaffer, Joanne Shimada, Jeffrey Umland, Marian Werner, Michael Oskin, Douglas Burbank, and Douglas Alsdorf. The shuttle radar topography mission.Reviews...
-
[4]
Jian Gao, Jin Liu, and Shunping Ji. Rational polynomial camera model warping for deep learning based satellite multi-view stereo matching.2021 IEEE/CVF International Conference on Computer Vision (ICCV), pages 6128–6137,
2021
-
[5]
2d gaussian splatting for geometrically accurate radiance fields.ACM SIGGRAPH 2024 Conference Papers,
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically accurate radiance fields.ACM SIGGRAPH 2024 Conference Papers,
2024
-
[6]
Wildgaussians: 3d gaussian splatting in the wild.arXiv preprint arXiv:2407.08447,
Jonáš Kulhánek, Songyou Peng, Zuzana Kúkelová, Marc Pollefeys, and Torsten Sattler. Wildgaus- sians: 3d gaussian splatting in the wild.ArXiv, abs/2407.08447,
-
[7]
Data fusion contest 2019 (dfc2019),
Bertrand Le Saux, Naoto Yokoya, Ronny Hänsch, and Myron Brown. Data fusion contest 2019 (dfc2019),
2019
-
[8]
URLhttps://dx.doi.org/10.21227/c6tm-vw12. Jie-Ying Lee, Yi-Ruei Liu, Shr-Ruei Tsai, Wei-Cheng Chang, Chung-Ho Wu, Jiewen Chan, Zhenjun Zhao, Chieh Hubert Lin, and Yu-Lun Liu. Skyfall-gs: Synthesizing immersive 3d urban scenes from satellite imagery.ArXiv, abs/2510.15869,
-
[9]
Roger Marí, Gabriele Facciolo, and Thibaud Ehret. Sat-nerf: Learning multi-view satellite pho- togrammetry with transient objects and shadow modeling using rpc cameras.2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pages 1310–1320,
2022
-
[10]
Multi-date earth observation nerf: The detail is in the shadows
Roger Marí, Gabriele Facciolo, and Thibaud Ehret. Multi-date earth observation nerf: The detail is in the shadows. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, pages 2034–2044, June
2034
-
[11]
WORLD GEODETIC SYSTEM 1984 - Its Definition and Relationships with Local Geodetic Systems
NGA. WORLD GEODETIC SYSTEM 1984 - Its Definition and Relationships with Local Geodetic Systems. Technical Report NGA.STND.0036_1.0.0_WGS84, National Geospatial-Intelligence Agency,
1984
-
[12]
Sanz Subirana, J
10 J. Sanz Subirana, J. M. Juan Zornoza, and M. Hernández-Pajares. Transformations between ecef and enu coordinates, 2011a. URL https://gssc.esa.int/navipedia/index.php/ Transformations_between_ECEF_and_ENU_coordinates. Accessed 2026-04-13. J. Sanz Subirana, J. M. Juan Zornoza, and M. Hernández-Pajares. Ellipsoidal and cartesian coordinates conversion, 20...
2026
-
[13]
doi: doi:10.1515/9783110250008
ISBN 9783110250008. doi: doi:10.1515/9783110250008. Qi Wu, Janick Martinez Esturo, Ashkan Mirzaei, Nicolas Moënne-Loccoz, and Zan Gojcic. 3dgut: Enabling distorted cameras and secondary rays in gaussian splatting.2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 26036–26046,
-
[14]
Shadow-aware 3d gaussian splatting for multi-view satellite images
Jiawei Zhang, Xiangrong Zhang, Junxiao Li, Xu Tang, Tianyang Zhang, Guanchun Wang, Feixiang Liu, and Licheng Jiao. Shadow-aware 3d gaussian splatting for multi-view satellite images. IGARSS 2025 - 2025 IEEE International Geoscience and Remote Sensing Symposium, pages 7895–7898,
2025
-
[15]
Leveraging vision reconstruction pipelines for satellite imagery.2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), pages 2139–2148,
Kai Zhang, Jin Sun, and Noah Snavely. Leveraging vision reconstruction pipelines for satellite imagery.2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), pages 2139–2148,
2019
-
[16]
Qingyuan Zhou, Yue Gong, Weidong Yang, Jiaze Li, Yeqi Luo, Baixin Xu, Shuhao Li, Ben Fei, and Ying He. Mgsr: 2d/3d mutual-boosted gaussian splatting for high-fidelity surface reconstruction under various light conditions.2025 IEEE/CVF International Conference on Computer Vision (ICCV), pages 27295–27304,
2025
-
[17]
−sinλ cosλ 0 # ,e ϕ =
+h sinϕ = x y z (16) We recall the definition of the local orthonormal basis (eλ,e ϕ,e h) of Equation (9), corresponding to the east, north, and ellipsoidal-up axes expressed in ECEF coordinates [Subirana et al., 2011a]. eλ = "−sinλ cosλ 0 # ,e ϕ = "−sinϕcosλ −sinϕsinλ cosϕ # ,e h = "cosϕcosλ cosϕsinλ sinϕ # (17) Since ϕ and h are held fixed w...
2014
-
[18]
−(M ϕ +h) sinϕcosλ −(M ϕ +h) sinϕsinλ (Mϕ +h) cosϕ # = (M ϕ +h)e ϕ (23) Finally, the partial derivative ∂f ∂h for the heighthis given by: ∂f ∂h =
cosϕ=M ϕ cosϕ.(22) Subsequently, we can reduce the derivation ∂f ∂ϕ to: ∂f ∂ϕ = "−(M ϕ +h) sinϕcosλ −(M ϕ +h) sinϕsinλ (Mϕ +h) cosϕ # = (M ϕ +h)e ϕ (23) Finally, the partial derivative ∂f ∂h for the heighthis given by: ∂f ∂h = "cosϕcosλ cosϕsinλ sinϕ # =e h (24) Conceptually, these derivatives show that small longitude increments correspond to eastward di...
2019
-
[19]
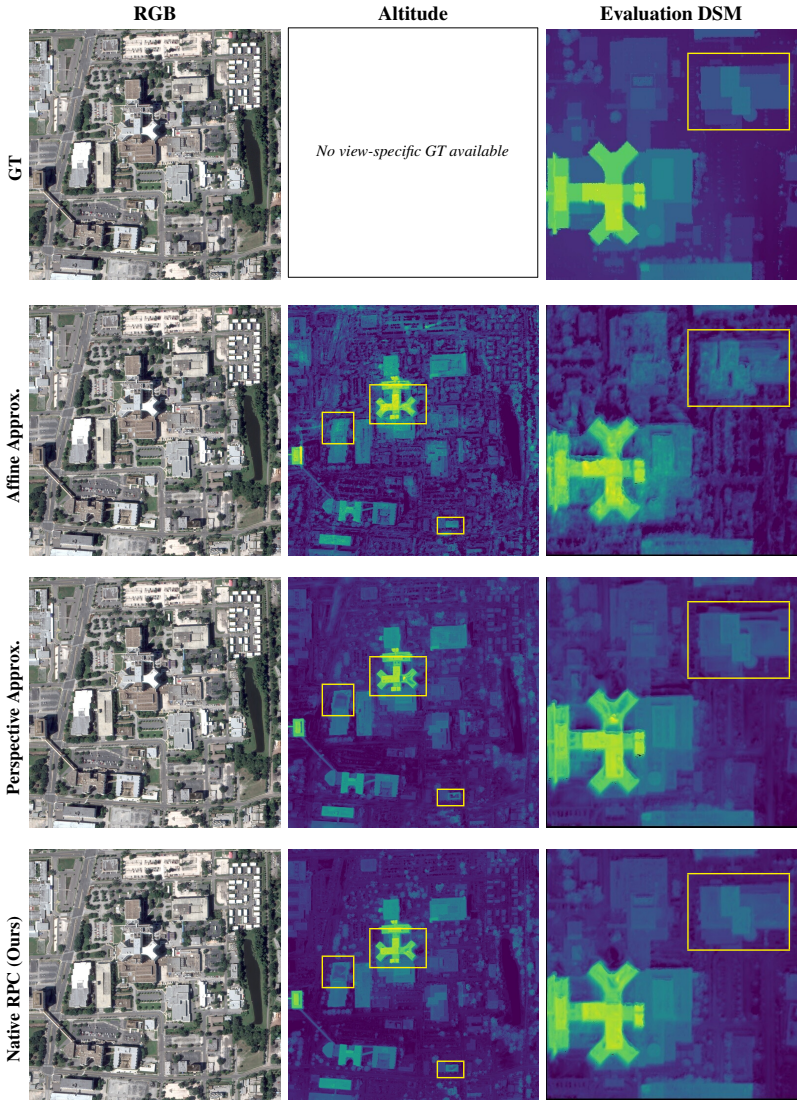
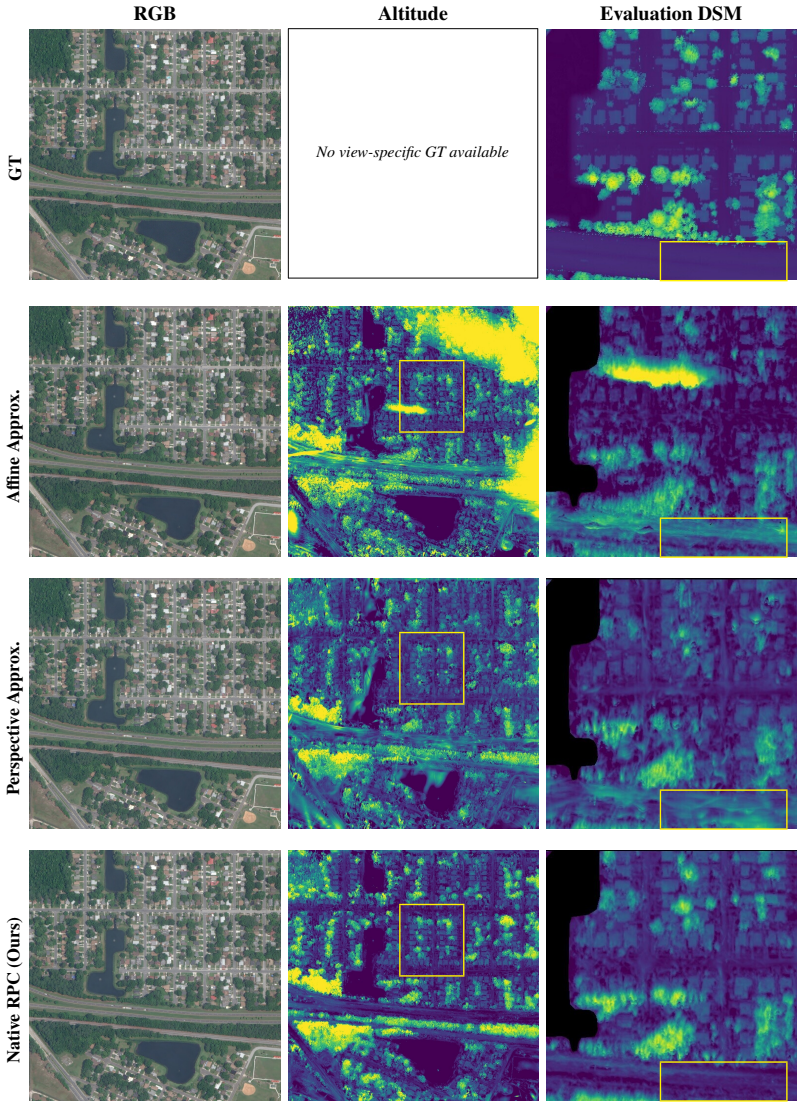
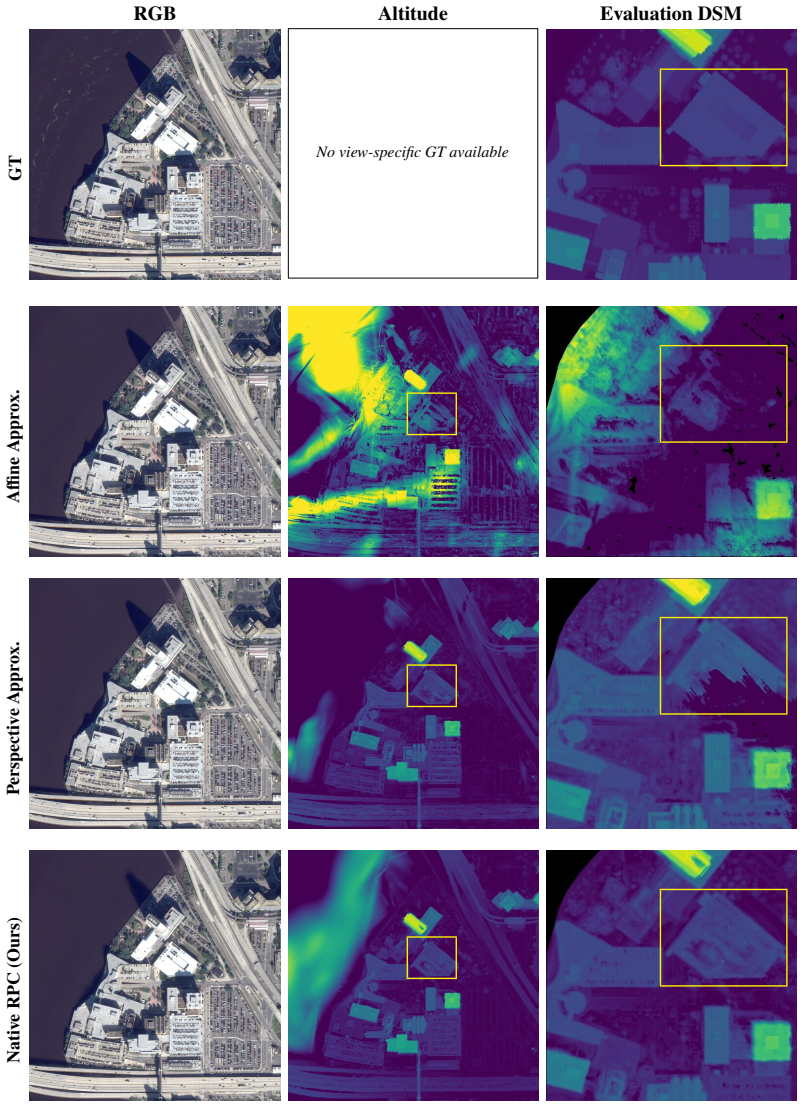
The altitude and corresponding DSM are clipped to a consistent value range across all three camera models to allow for visual comparison
We select the training view with the lowest MAE. The altitude and corresponding DSM are clipped to a consistent value range across all three camera models to allow for visual comparison. Areas-of-Interest are marked in yellow. 12 RGB Altitude Evaluation DSM GT No view-specific GT available Affine Approx. Perspective Approx. Native RPC (Ours) Figure 3: Qua...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.