Learning All-Terrain Locomotion for a Planetary Rover with Actively Articulated Suspension
Pith reviewed 2026-07-01 07:22 UTC · model grok-4.3
The pith
A single neural network controller unlocks active suspension capabilities for autonomous planetary rover traversal of loose soil and obstacles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
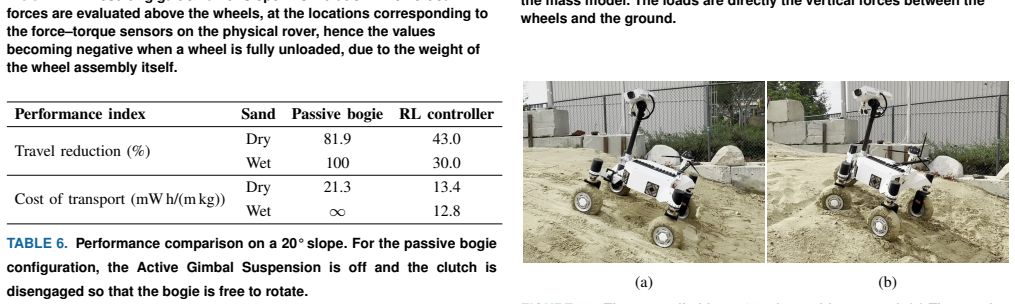
A reinforcement learning framework trains a single neural network controller on proprioceptive and exteroceptive feedback to operate the active gimbal suspension, merging terrain-specialized policies into one network that achieves autonomous obstacle negotiation and lower cost of transport than passive suspension across heterogeneous loose-soil conditions, with zero-shot transfer to hardware.
What carries the argument
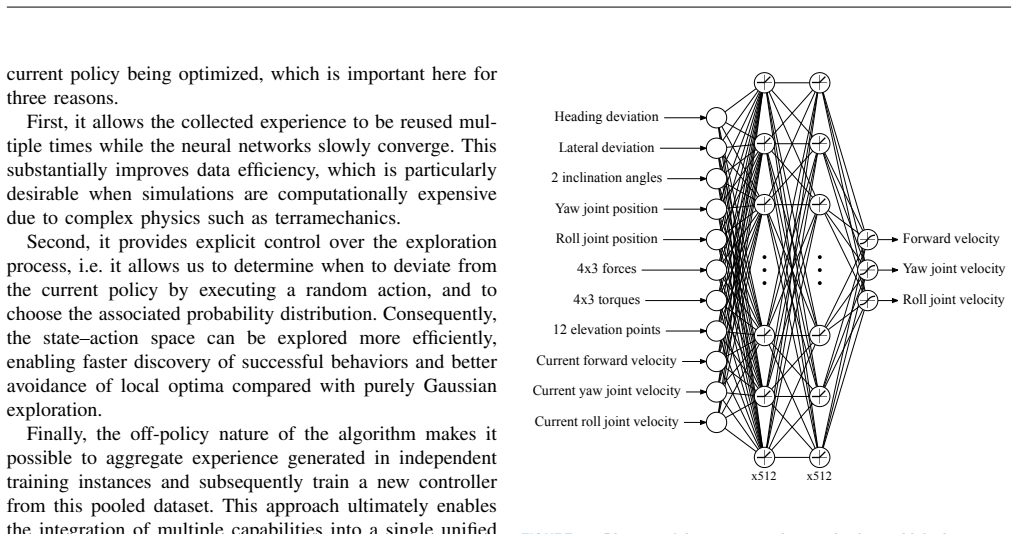
The policy consolidation strategy that merges experience from terrain-specialized reinforcement learning agents into one neural network controller operating on chassis attitude, joint states, force-torque, and sparse stereo elevation data.
If this is right
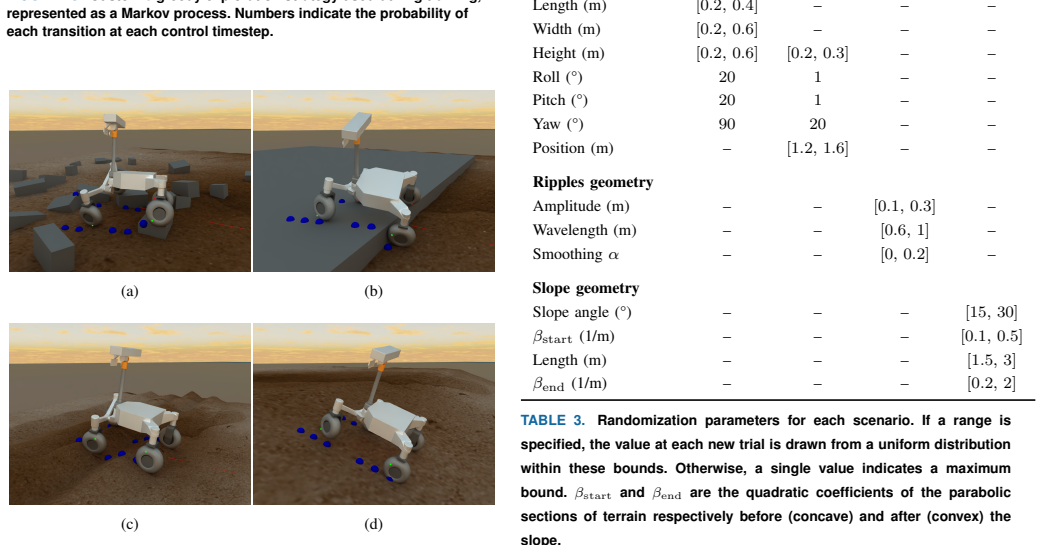
- The controller enables traversal of rock fields, Bickler traps, wheel-high steps, sand ripples, and 20-degree sandy slopes without explicit terrain classification or controller switching.
- On dry sand the learned policy reduces cost of transport by 37 percent despite added actuation; on wet sand it maintains mobility where passive suspension is immobilized.
- Zero-shot hardware deployment succeeds after domain randomization and system identification, operating on combined proprioceptive and exteroceptive inputs.
- A unified policy eliminates the need for multiple specialized controllers or real-time terrain detection.
Where Pith is reading between the lines
- Active suspension systems on future rovers could be deployed with less hand-crafted control logic if policy consolidation scales to additional terrain types.
- The same consolidation approach might apply to other articulated mobile robots facing heterogeneous environments without requiring onboard terrain classifiers.
- Energy savings on slopes could extend mission range on extraterrestrial bodies where regolith properties vary locally.
Load-bearing premise
The high-fidelity DARTS simulation with rigid-contact dynamics and Bekker-Wong terramechanics, plus domain randomization and noise injection, produces policies that transfer directly to the physical rover at the reported performance levels.
What would settle it
Measure cost of transport and mobility success for the physical rover versus passive suspension on a 20-degree wet sand slope; if the active controller does not outperform or the gap falls far short of 37 percent on dry sand, the transfer claim does not hold.
Figures

read the original abstract
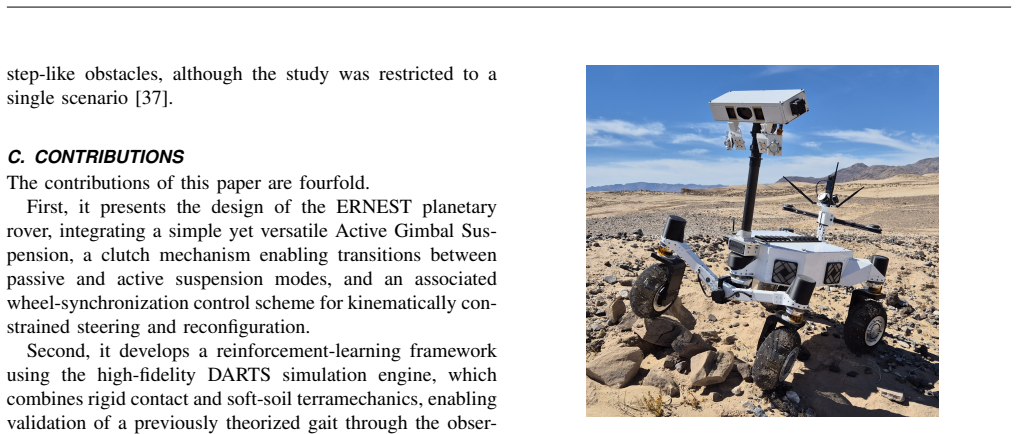
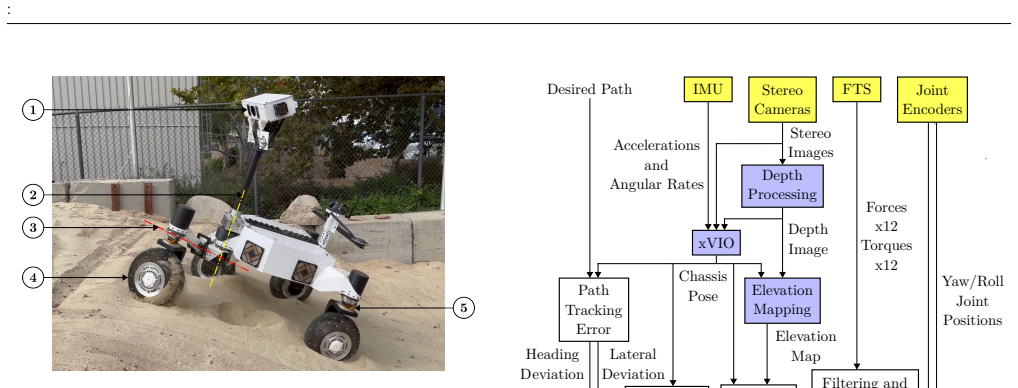
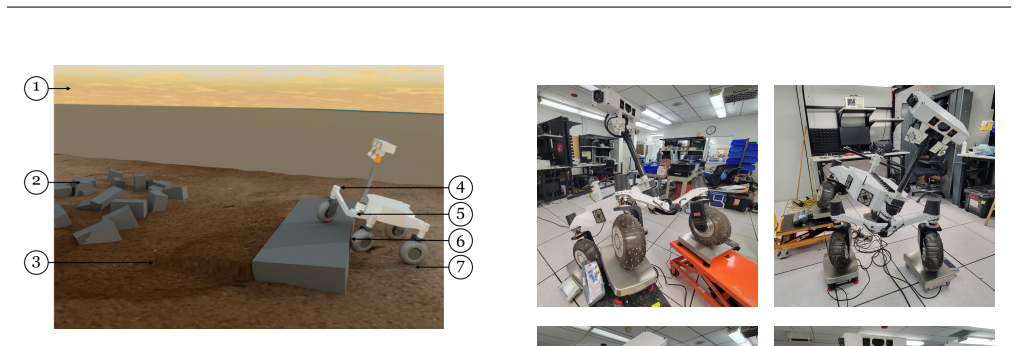
This paper presents ERNEST, a four-wheeled planetary rover concept equipped with a two-degree-of-freedom Active Gimbal Suspension that combines yaw and roll actuation to enable wheel reconfiguration, steering, and active load redistribution. A single neural network controller, trained to track a desired path across challenging terrain, fully unlocks the capabilities of this actuated suspension system for autonomous obstacle negotiation. A reinforcement learning framework is developed using the high-fidelity DARTS simulation engine, which combines rigid-contact dynamics and Bekker-Wong terramechanics, enabling the emergence of locomotion strategies adapted to loose-soil conditions. To obtain a single unified controller across heterogeneous terrains, a policy consolidation strategy merges the experience of terrain-specialized agents into one neural network, eliminating the need for explicit terrain classification and controller switching. The resulting controller operates on a combination of proprioceptive and exteroceptive feedback, including sparse stereo-derived terrain elevation, chassis attitude, joint states, and force-torque measurements. Zero-shot transfer to the physical rover is achieved through domain randomization, sensor noise injection, and model-to-real system identification. Experimental results demonstrate autonomous traversal of rock fields, a Bickler trap (bump obstacle), a wheel-high step, sand ripples, and sandy slopes. On a 20{\deg} sandy slope, the learned controller reduces the cost of transport by 37% on dry sand despite the additional actuation, and achieves superior performance on wet sand where the passive suspension becomes completely immobilized. A video accompanying this paper is available at https://youtu.be/d684P5a3xMc
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ERNEST, a four-wheeled planetary rover with a two-DOF Active Gimbal Suspension (yaw-roll actuation) for wheel reconfiguration and load redistribution. It develops a reinforcement learning framework in the DARTS simulator (rigid-contact dynamics plus Bekker-Wong terramechanics) to train a single neural network policy that tracks desired paths across heterogeneous terrains via policy consolidation, using proprioceptive/exteroceptive feedback. Zero-shot sim-to-real transfer is claimed via domain randomization, noise injection, and system identification. Hardware experiments report autonomous traversal of rock fields, Bickler trap, steps, ripples, and slopes, with a 37% cost-of-transport reduction on a 20° dry sand slope and superior performance on wet sand where the passive suspension immobilizes.
Significance. If the zero-shot transfer and performance margins hold under rigorous validation, the work would demonstrate that a unified learned controller can unlock active suspension capabilities for planetary rovers without terrain classification or switching, offering a practical path to improved mobility in loose soils.
major comments (2)
- [Abstract] Abstract (Experimental results paragraph): The headline claims of 37% CoT reduction on dry sand and complete immobilization of the passive baseline on wet sand are stated without error bars, number of trials performed, or any statistical tests. This directly affects assessment of whether the reported margins are reliable.
- [Abstract] Abstract (Zero-shot transfer sentence): The manuscript asserts that domain randomization, sensor noise injection, and model-to-real system identification enable zero-shot transfer, yet provides no validation data such as sim-vs-real CoT curves, identified Bekker-Wong parameters for wet sand (cohesion/friction), or failure cases under distribution shift. This is load-bearing for the wet-sand immobilization claim.
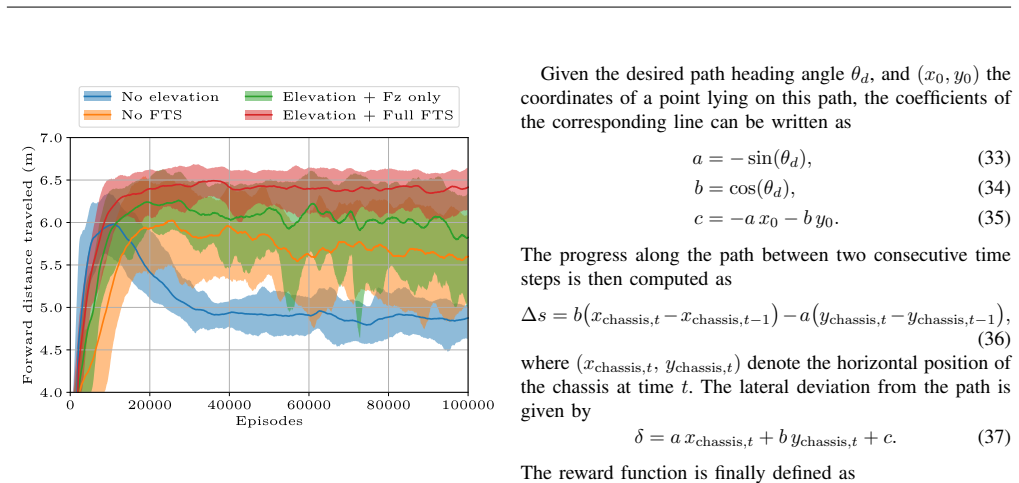
minor comments (1)
- [Abstract] The abstract mentions a video but does not indicate which specific behaviors or quantitative results it illustrates.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the presentation of experimental results and validation of zero-shot transfer. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (Experimental results paragraph): The headline claims of 37% CoT reduction on dry sand and complete immobilization of the passive baseline on wet sand are stated without error bars, number of trials performed, or any statistical tests. This directly affects assessment of whether the reported margins are reliable.
Authors: We agree that the abstract would be strengthened by statistical context. In the revised version we will qualify the claims as '37% mean CoT reduction (std. dev. reported in main text) across repeated trials' and add a parenthetical note on trial count. The main text (Section V and Figure 8) already contains per-condition means, standard deviations from five trials, and t-test results; we will ensure the abstract explicitly cross-references these. revision_made = yes revision: yes
-
Referee: [Abstract] Abstract (Zero-shot transfer sentence): The manuscript asserts that domain randomization, sensor noise injection, and model-to-real system identification enable zero-shot transfer, yet provides no validation data such as sim-vs-real CoT curves, identified Bekker-Wong parameters for wet sand (cohesion/friction), or failure cases under distribution shift. This is load-bearing for the wet-sand immobilization claim.
Authors: Section IV-B and IV-C already describe the randomization ranges, noise model, and system-identification procedure. We acknowledge that the abstract itself contains no explicit validation numbers. We will revise the abstract sentence to read 'validated through domain randomization, noise injection, and model-to-real identification (parameters and sim-to-real curves in supplementary material)' and add the wet-sand Bekker-Wong values (cohesion and friction angle) plus a new supplementary figure showing sim-vs-real CoT. Failure cases under distribution shift are discussed qualitatively in Section VI; we will expand this paragraph with one concrete example. revision_made = partial revision: partial
Circularity Check
No significant circularity; results are empirical hardware measurements after sim training
full rationale
The paper's central claims consist of measured hardware performance (37% CoT reduction, superior wet-sand traversal) obtained after zero-shot deployment of an RL policy. No equations, fitted parameters, or self-citations are shown that reduce these outcomes to quantities defined by the inputs themselves. The simulation (DARTS + Bekker-Wong) and domain randomization are presented as enabling assumptions rather than self-referential derivations. This matches the default expectation of an empirical robotics paper whose results stand or fall on external validation rather than internal definitional closure.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Bekker-Wong terramechanics combined with rigid-contact dynamics in DARTS accurately represents real loose-soil rover interaction
- domain assumption Domain randomization plus sensor noise injection closes the sim-to-real gap for this system
invented entities (1)
-
Active Gimbal Suspension (two-DOF yaw-roll mechanism)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Ground mobility systems for planetary exploration,
P. Fiorini, “Ground mobility systems for planetary exploration,” in Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), vol. 1. IEEE, 2000, pp. 908–913
2000
-
[2]
Robot mobility systems for planetary surface exploration–state-of-the-art and future outlook: a literature survey,
A. Seeni, B. Sch ¨afer, and G. Hirzinger, “Robot mobility systems for planetary surface exploration–state-of-the-art and future outlook: a literature survey,”Aerospace Technologies Advancements, vol. 492, pp. 189–208, 2010
2010
-
[3]
Locomotion systems for ground mobile robots in unstructured environments,
L. Bruzzone and G. Quaglia, “Locomotion systems for ground mobile robots in unstructured environments,”Mechanical sciences, vol. 3, no. 2, pp. 49–62, 2012
2012
-
[4]
Planetary surface mobility and exploration: A review,
A. Thoesen and H. Marvi, “Planetary surface mobility and exploration: A review,”Current Robotics Reports, pp. 1–11, 2021
2021
-
[5]
N. A. of Sciences Engineering and Medicine,Origins, Worlds, and Life: A Decadal Strategy for Planetary Science and Astrobiology 2023-2032. Washington, DC: The National Academies Press, 2023. [Online]. Available: https://nap.nationalacademies.org/catalog/26522/ origins-worlds-and-life-a-decadal-strategy-for-planetary-science
2023
-
[6]
Roving over Mars,
D. Bickler, “Roving over Mars,”Mechanical Engineering, vol. 120, no. 04, pp. 74–77, 1998
1998
-
[7]
Shrimp, a rover architecture for long range Martian mission,
T. Estier, R. Piguet, R. Eichhorn, and R. Siegwart, “Shrimp, a rover architecture for long range Martian mission,” inProceedings of the Sixth ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA’2000), 2000, pp. 5–7
2000
-
[8]
Design optimization of a lightweight rocker–bogie rover for ocean worlds applications,
H. Nayar, J. Kim, B. Chamberlain-Simon, K. Carpenter, M. Hans, A. Boettcher, G. Meirion-Griffith, B. Wilcox, and B. Bittner, “Design optimization of a lightweight rocker–bogie rover for ocean worlds applications,”International Journal of Advanced Robotic Systems, vol. 16, no. 6, p. 1729881419885696, 2019
2019
-
[9]
Comprehensive locomotion performance evaluation of all-terrain robots,
T. Thueer, A. Krebs, and R. Siegwart, “Comprehensive locomotion performance evaluation of all-terrain robots,” in2006 IEEE/RSJ inter- national conference on intelligent robots and systems. IEEE, 2006, pp. 4260–4265
2006
-
[10]
Opportunity Mars rover mission: Overview and selected results from purgatory ripple to traverses to endeavour crater,
R. E. Arvidson, J. W. Ashley, J. Bell, M. Chojnacki, J. Cohen, T. Economou, W. H. Farrand, R. Fergason, I. Fleischer, P. Geissler et al., “Opportunity Mars rover mission: Overview and selected results from purgatory ripple to traverses to endeavour crater,”Journal of Geophysical Research: Planets, vol. 116, no. E7, 2011
2011
-
[11]
Mars rover Spirit (2003-10): NASA commits robot explorer to her final resting place,
K. Sanderson, “Mars rover Spirit (2003-10): NASA commits robot explorer to her final resting place,”Nature, vol. 463, no. 7281, pp. 600–601, 2010
2003
-
[12]
Traverse performance characterization for the Mars Science Laboratory rover,
M. Heverly, J. Matthews, J. Lin, D. Fuller, M. Maimone, J. Biesi- adecki, and J. Leichty, “Traverse performance characterization for the Mars Science Laboratory rover,”Journal of Field Robotics, vol. 30, no. 6, pp. 835–846, 2013
2013
-
[13]
The ExoMars rover locomotion subsystem,
N. Patel, R. Slade, and J. Clemmet, “The ExoMars rover locomotion subsystem,”Journal of Terramechanics, vol. 47, no. 4, pp. 227–242, 2010
2010
-
[14]
Improving mobile robot step- climbing capabilities with center-of-gravity control,
K. Skonieczny and G. M. D’Eleuterio, “Improving mobile robot step- climbing capabilities with center-of-gravity control,” inInternational Design Engineering Technical Conferences and Computers and Infor- mation in Engineering Conference, vol. 44106, 2010, pp. 1531–1538
2010
-
[15]
Mobile robot kinematic reconfigura- bility for rough terrain,
K. D. Iagnemma, A. Rzepniewski, S. Dubowsky, P. Pirjanian, T. L. Huntsberger, and P. S. Schenker, “Mobile robot kinematic reconfigura- bility for rough terrain,” inSensor Fusion and Decentralized Control in Robotic Systems III, vol. 4196. International Society for Optics and Photonics, 2000, pp. 413–420
2000
-
[16]
Design and field experimentation of a prototype lunar prospector,
D. Wettergreen, S. Moreland, K. Skonieczny, D. Jonak, D. Kohanbash, and J. Teza, “Design and field experimentation of a prototype lunar prospector,”The International Journal of Robotics Research, vol. 29, no. 12, pp. 1550–1564, 2010
2010
-
[17]
A new principle for climbing wheeled robots: Serpentine climbing with the open wheel platform,
J.-C. Fauroux, F. Chapelle, and B. Bouzgarrou, “A new principle for climbing wheeled robots: Serpentine climbing with the open wheel platform,” in2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2006, pp. 3405–3410
2006
-
[18]
Workpartner–hut-automations new hybrid walking machine,
I. Lepp ¨anen, S. Salmi, and A. Halme, “Workpartner–hut-automations new hybrid walking machine,” in1st International Conference on Climbing and Walking Robots, Brussels, 1998, pp. 391–394
1998
-
[19]
Stability and traction optimization of a reconfigurable wheel-legged robot,
C. Grand, F. Benamar, F. Plumet, and P. Bidaud, “Stability and traction optimization of a reconfigurable wheel-legged robot,”The International Journal of Robotics Research, vol. 23, no. 10-11, pp. 1041–1058, 2004
2004
-
[20]
ATHLETE: A cargo handling and manipulation robot for the moon,
B. H. Wilcox, T. Litwin, J. Biesiadecki, J. Matthews, M. Heverly, J. Morrison, J. Townsend, N. Ahmad, A. Sirota, and B. Cooper, “ATHLETE: A cargo handling and manipulation robot for the moon,” Journal of Field Robotics, vol. 24, no. 5, pp. 421–434, 2007
2007
-
[21]
Actively articulated suspension for a wheel-on-leg rover operating on a Martian analog surface,
W. Reid, F. J. P ´erez-Grau, A. H. G¨okto˘gan, and S. Sukkarieh, “Actively articulated suspension for a wheel-on-leg rover operating on a Martian analog surface,” in2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016, pp. 5596–5602
2016
-
[22]
Design and field testing of a rover with an actively articulated suspension system in a Mars analog terrain,
F. Cordes, F. Kirchner, and A. Babu, “Design and field testing of a rover with an actively articulated suspension system in a Mars analog terrain,”Journal of Field Robotics, vol. 35, no. 7, pp. 1149–1181, 2018
2018
-
[23]
Actively articu- lated wheel-on-limb mobility for traversing europa analogue terrain,
W. Reid, G. Meirion-Griffith, S. Karumanchi, B. Emanuel, B. Chamberlain-Simon, J. Bowkett, and M. Garrett, “Actively articu- lated wheel-on-limb mobility for traversing europa analogue terrain,” inField and Service Robotics. Springer, 2021, pp. 337–351
2021
-
[24]
Introduction to terrain-vehicle systems. part i: The terrain. part ii: The vehicle,
M. G. Bekker, “Introduction to terrain-vehicle systems. part i: The terrain. part ii: The vehicle,” Michigan Univ Ann Arbor, Tech. Rep., 1969
1969
-
[25]
Modeling wheel- sand interaction for optimization of a rolling-peristaltic motion of a Marsokhod robot,
G. Andrade, F. Benamar, P. Bidaud, and R. Chatila, “Modeling wheel- sand interaction for optimization of a rolling-peristaltic motion of a Marsokhod robot,” inInternational Conference on Intelligent Robots and Systems, 1998, pp. 576–581. 20
1998
-
[26]
First experimental in- vestigations on wheel-walking for improving triple-bogie rover lo- comotion performances,
M. Azkarate, M. Zwick, J. Hidalgo-Carrio, R. Nelen, T. Wiese, P. Poulakis, L. Joudrier, and G. Visentin, “First experimental in- vestigations on wheel-walking for improving triple-bogie rover lo- comotion performances,”Proceedings Advanced Space Technologies for Robotics and Automation (ASTRA). Noordwijk, The Netherlands: European Space Agency, 2015
2015
-
[27]
Hybrid locomotion of a wheel-legged machine,
A. Halme, I. Lepp ¨anen, S. Salmi, and S. Yl ¨onen, “Hybrid locomotion of a wheel-legged machine,” in3rd Int. Conference on Climbing and Walking Robots (CLAWAR’00), 2000
2000
-
[28]
Performance evaluation of locomotion modes of an hybrid wheel-legged robot for self-adaptation to ground conditions,
F. Benamar, C. Grand, G. Besseron, and F. Plumet, “Performance evaluation of locomotion modes of an hybrid wheel-legged robot for self-adaptation to ground conditions,” inASTRA’04, 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation, 2004
2004
-
[29]
Material remodeling and un- conventional gaits facilitate locomotion of a robophysical rover over granular terrain,
S. Shrivastava, A. Karsai, Y . O. Aydin, R. Pettinger, W. Bluethmann, R. O. Ambrose, and D. I. Goldman, “Material remodeling and un- conventional gaits facilitate locomotion of a robophysical rover over granular terrain,”Science robotics, vol. 5, no. 42, p. eaba3499, 2020
2020
-
[30]
Push–pull locomotion for vehicle extrication,
C. Creager, K. Johnson, M. Plant, S. Moreland, and K. Skonieczny, “Push–pull locomotion for vehicle extrication,”Journal of Terrame- chanics, vol. 57, pp. 71–80, 2015
2015
-
[31]
Crawling locomotion enabled by a novel actuated rover chassis,
A. Bouton and Y . Gao, “Crawling locomotion enabled by a novel actuated rover chassis,” in2022 IEEE International Conference on Robotics and Automation (ICRA). IEEE, forthcoming, 2022
2022
-
[32]
Experimental study of alternative rover configurations and mobility modes for planetary exploration,
A. Bouton, W. Reid, T. Brown, A. Daca, M. Sabzehi, and H. Nayar, “Experimental study of alternative rover configurations and mobility modes for planetary exploration,” in2023 IEEE Aerospace Conference. IEEE, 2023, pp. 1–13
2023
-
[33]
Reinforcement learn- ing for quadrupedal locomotion: Current advancements and future perspectives,
M. Gurram, P. K. Uttam, and S. S. Ohol, “Reinforcement learn- ing for quadrupedal locomotion: Current advancements and future perspectives,” in2025 9th International Conference on Mechanical Engineering and Robotics Research (ICMERR). IEEE, 2025, pp. 28–38
2025
-
[34]
Anymal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “Anymal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadi7566, 2024
2024
-
[35]
Learning robust autonomous navigation and locomotion for wheeled- legged robots,
J. Lee, M. Bjelonic, A. Reske, L. Wellhausen, T. Miki, and M. Hutter, “Learning robust autonomous navigation and locomotion for wheeled- legged robots,”Science Robotics, vol. 9, no. 89, p. eadi9641, 2024
2024
-
[36]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science robotics, vol. 7, no. 62, p. eabk2822, 2022
2022
-
[37]
Marcel: Mobile active rover chassis for enhanced locomotion,
A. Bouton and Y . Gao, “Marcel: Mobile active rover chassis for enhanced locomotion,”Journal of Field Robotics, vol. 40, no. 6, pp. 1504–1524, 2023
2023
-
[38]
The development of wheels for the lunar roving vehicle,
V . Asnani, D. Delap, and C. Creager, “The development of wheels for the lunar roving vehicle,”Journal of Terramechanics, vol. 46, no. 3, pp. 89–103, 2009
2009
-
[39]
Design, assembly, and testing of compliant spring tires for lunar rovers,
M. Lu, T. Brown, W. Reid, A. Bouton, and H. Nayar, “Design, assembly, and testing of compliant spring tires for lunar rovers,” in AIAA SCITECH 2026 Forum, 2026, p. 0787
2026
-
[40]
xvio: A range-visual- inertial odometry framework,
J. Delaune, D. S. Bayard, and R. Brockers, “xvio: A range-visual- inertial odometry framework,”arXiv preprint arXiv:2010.06677, 2020
-
[41]
Small vision systems: Hardware and implementation,
K. Konolige, “Small vision systems: Hardware and implementation,” Robotics Research, pp. 203–212, 1998
1998
-
[42]
Probabilistic terrain mapping for mobile robots with uncertain localization,
P. Fankhauser, M. Bloesch, and M. Hutter, “Probabilistic terrain mapping for mobile robots with uncertain localization,”IEEE Robotics and Automation Letters (RA-L), vol. 3, no. 4, pp. 3019–3026, 2018
2018
-
[43]
Dshell-DARTS: A Reusability-Focused Multi-Mission Aerospace and Robotics Simulation Toolkit,
J. Garcia-Bonilla, C. Leake, A. Elmquist, T. D. Hasseler, V . Steyert, A. Gaut, and A. Jain, “Dshell-DARTS: A Reusability-Focused Multi-Mission Aerospace and Robotics Simulation Toolkit,” in2025 IEEE Aerospace Conference, Mar. 2025, pp. 1–13, iSSN: 2996-2358. [Online]. Available: https://ieeexplore.ieee.org/document/11068690/
-
[44]
Jain,Robot and Multibody Dynamics: Analysis and Algorithms
A. Jain,Robot and Multibody Dynamics: Analysis and Algorithms. Springer, December 2010
2010
-
[45]
Multi-fidelity simulation for lunar and planetary rover missions,
J. Garcia-Bonilla, T. D. Hasseler, and A. Elmland, “Multi-fidelity simulation for lunar and planetary rover missions,” inProceedings of the IEEE Aerospace Conference, 2026, pp. 1–12, submitted
2026
-
[46]
Iris: High-fidelity perception sensor modeling for closed-loop planetary simulations,
C. Aiazzi, A. Gaut, A. Young, A. Elmquist, and A. Jain, “Iris: High-fidelity perception sensor modeling for closed-loop planetary simulations,” inAIAA Scitech Forum, San Diego, CA, USA, January 2022
2022
-
[47]
Orbit: A unified simulation framework for interactive robot learning environments,
M. Mittal, C. Yu, Q. Yu, J. Liu, N. Rudin, D. Hoeller, J. L. Yuan, R. Singh, Y . Guo, H. Mazhar, A. Mandlekar, B. Babich, G. State, M. Hutter, and A. Garg, “Orbit: A unified simulation framework for interactive robot learning environments,”IEEE Robotics and Automa- tion Letters, vol. 8, no. 6, pp. 3740–3747, 2023
2023
-
[48]
Terramechanics- based model for steering maneuver of planetary exploration rovers on loose soil,
G. Ishigami, A. Miwa, K. Nagatani, and K. Yoshida, “Terramechanics- based model for steering maneuver of planetary exploration rovers on loose soil,”Journal of Field Robotics, vol. 24, no. 3, pp. 233–250,
-
[49]
Available: https://onlinelibrary.wiley.com/doi/abs/10
[Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10. 1002/rob.20187
-
[50]
Hegedus,A Simplified Method for the Determination of Bulldozing Resistance, ser
E. Hegedus,A Simplified Method for the Determination of Bulldozing Resistance, ser. DEPARTMENT OF THE ARMY , ORDNANCE TANK-AUTOMOTIVE COMMAND, LAND LOCOMOTION LABORATORY REPORT NO. 61. U.S. Army Ordnance Tank-Automotive Command, 1960. [Online]. Available: https://books.google.com/books?id=EEZqGwAACAAJ
1960
-
[51]
Deformable soil with adaptive level of detail for tracked and wheeled vehicles,
A. Tasora, D. Mangoni, D. Negrut, R. Serban, and P. Jayakumar, “Deformable soil with adaptive level of detail for tracked and wheeled vehicles,”International Journal of Vehicle Performance, vol. 5, pp. 1– 16, 08 2018
2018
-
[52]
Fast analytical models of wheeled locomotion in deformable terrain for mobile robots,
Z. Jia, W. Smith, and H. Peng, “Fast analytical models of wheeled locomotion in deformable terrain for mobile robots,”Robotica, vol. 31, 01 2013
2013
-
[53]
Geotechnical review of existing Mars soil simulants for surface mobility,
H. Oravec, V . Asnani, C. Creager, and S. Moreland, “Geotechnical review of existing Mars soil simulants for surface mobility,” inEarth and Space 2021, 2021, pp. 157–170
2021
-
[54]
Addressing function approxi- mation error in actor-critic methods,
S. Fujimoto, H. Hoof, and D. Meger, “Addressing function approxi- mation error in actor-critic methods,” inInternational Conference on Machine Learning. PMLR, 2018, pp. 1587–1596
2018
-
[55]
Continuous control with deep reinforcement learning
T. P. Lillicrap, J. J. Hunt, A. Pritzel, N. Heess, T. Erez, Y . Tassa, D. Silver, and D. Wierstra, “Continuous control with deep reinforce- ment learning,”arXiv preprint arXiv:1509.02971, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[56]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[57]
Understanding plasticity in neural networks,
C. Lyle, Z. Zheng, E. Nikishin, B. A. Pires, R. Pascanu, and W. Dab- ney, “Understanding plasticity in neural networks,” inInternational Conference on Machine Learning. PMLR, 2023, pp. 23 190–23 211. 21
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.