MinNav: Minimalist Navigation Using Optical Flow For Active Tiny Aerial Robots
Pith reviewed 2026-06-27 21:29 UTC · model grok-4.3
The pith
Optical flow from a monocular camera enables navigation through unknown obstacles and gaps for tiny aerial robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is that optical flow computed from monocular images, along with its uncertainty, when used with active exploratory motion, supplies enough information to reliably navigate scenes containing static and dynamic obstacles and unknown-shaped gaps without any prior scene knowledge.
What carries the argument
Optical flow and its uncertainty estimates from monocular images, augmented by active exploratory motion of the robot to gather environmental information.
If this is right
- Navigation becomes possible on tiny aerial robots using only a monocular camera without depth sensors.
- The method handles both static and dynamic obstacles as well as gaps of arbitrary unknown shapes.
- Overall success rate reaches 70% in diverse real-world environments.
- Computation is reduced by factors of magnitude compared to depth-based methods while maintaining on-par performance.
Where Pith is reading between the lines
- Such minimalist approaches could lower the cost and size barriers for autonomous aerial navigation in constrained platforms.
- The reliance on active motion suggests that passive vision alone may be insufficient for these tasks.
Load-bearing premise
That optical flow from monocular images and its uncertainty, when paired with active exploratory motion, provides reliable information to detect obstacles and navigate unknown gaps without scene priors or extra sensors.
What would settle it
Consistent failure of the robot to navigate successfully through a series of tests involving fast dynamic obstacles or highly irregular gap shapes using only the described optical flow method.
Figures

read the original abstract
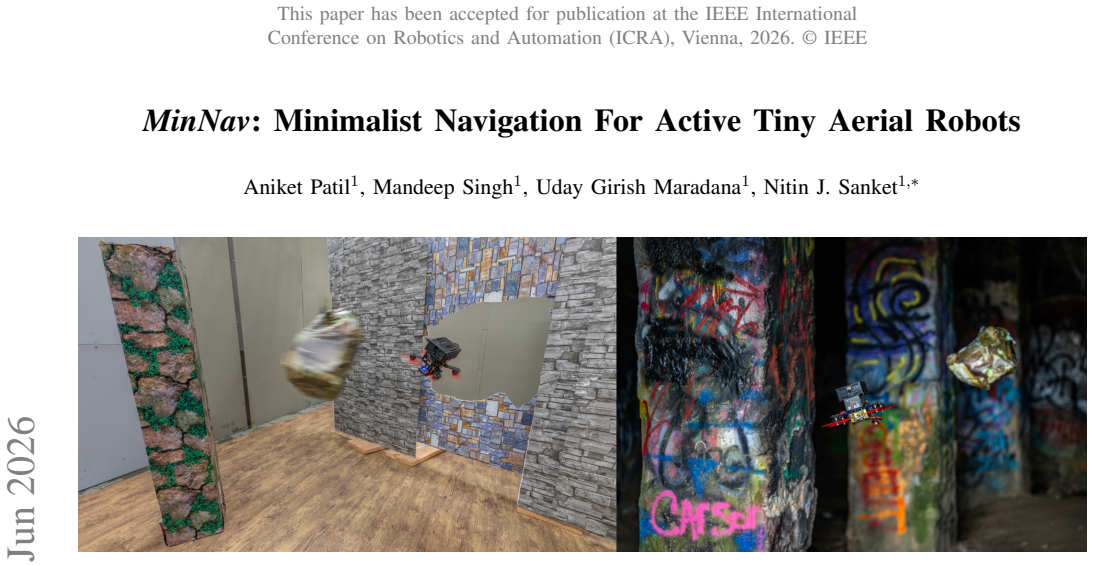
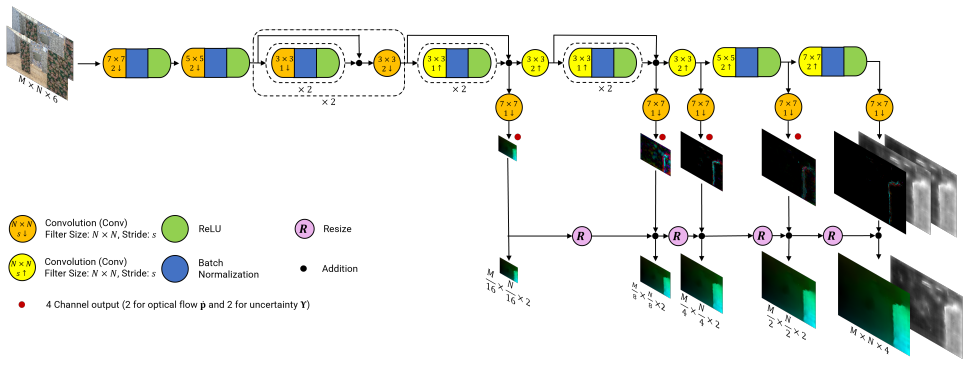
Navigation using a monocular camera is pivotal for autonomous operation on tiny aerial robots due to their perfect balance of versatility, cost and accuracy. In this paper, we introduce MinNav, a navigation stack based on optical flow and its uncertainty to fly through a scene with static and dynamic obstacles and unknown-shaped gaps without any prior knowledge of the scene components and/or their locations/ordering. We further improve success rate by using the activeness of the robot to move around in an exploratory way to find obstacles and navigate. We successfully evaluate and demonstrate the proposed approach in many real-world experiments in various environments with static and dynamic obstacles and unknown-shaped gaps with an overall success rate of 70%. To the best of our knowledge, this is the first solution to tackle all the aforementioned navigation cases without prior knowledge using a monocular camera. Our approach is on par in performance with depth based methods with factors of magnitude less computation required and can readily run onboard tiny aerial robots. The accompanying video, supplementary material, code and dataset can be found at https://pear.wpi.edu/research/minnav.html
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces MinNav, a navigation stack for tiny aerial robots that computes optical flow and its uncertainty from monocular images, augments this with active exploratory robot motion, and uses the combination to navigate scenes containing static and dynamic obstacles as well as gaps of unknown shape, all without any prior scene knowledge. The authors report an overall 70% success rate across real-world trials in varied environments and position the work as the first monocular-camera solution addressing all listed cases; they further claim performance on par with depth-based methods at orders-of-magnitude lower compute, enabling onboard execution. Code, dataset, video, and supplementary material are provided.
Significance. If the central claims hold after addressing validation gaps, the work would be significant for resource-constrained aerial robotics by showing that optical-flow-based sensing plus active motion can substitute for heavier depth sensors in complex navigation tasks. The explicit release of code, dataset, and experimental material is a clear strength that supports reproducibility and community verification.
major comments (2)
- [Abstract / Results] Abstract and experimental evaluation: the reported 70% success rate is stated without the number of trials, per-scenario breakdown (static obstacles, dynamic obstacles, gap navigation), statistical measures, or quantitative comparisons to any baseline (depth-based or other monocular methods). This information is load-bearing for assessing whether the results support the reliability claims.
- [Methods] Methods / approach description: the central assumption that optical flow uncertainty plus active exploratory motion suffices to detect obstacles and unknown-shaped gaps even when local image texture is low is not accompanied by an explicit mechanism for handling high-uncertainty regions or by experiments in deliberately low-texture environments. Standard estimators (e.g., Lucas-Kanade) produce no usable signal in such regions, directly affecting the “no prior knowledge” claim.
minor comments (2)
- [Methods] Notation for optical-flow uncertainty is introduced without a clear equation reference or pseudocode showing how it is thresholded or fused with exploratory motion commands.
- [Figures] Figure captions and axis labels in the experimental results could be expanded to indicate trial counts and success/failure criteria.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract / Results] Abstract and experimental evaluation: the reported 70% success rate is stated without the number of trials, per-scenario breakdown (static obstacles, dynamic obstacles, gap navigation), statistical measures, or quantitative comparisons to any baseline (depth-based or other monocular methods). This information is load-bearing for assessing whether the results support the reliability claims.
Authors: We agree that additional detail on the experimental validation would improve clarity and support for the claims. The current manuscript states the overall 70% success rate from real-world trials in varied environments but does not include the requested breakdown, trial counts, statistics, or baseline comparisons in the abstract or results summary. We will revise the abstract and results section to incorporate the total number of trials, per-scenario success rates, statistical measures, and quantitative comparisons to depth-based methods. revision: yes
-
Referee: [Methods] Methods / approach description: the central assumption that optical flow uncertainty plus active exploratory motion suffices to detect obstacles and unknown-shaped gaps even when local image texture is low is not accompanied by an explicit mechanism for handling high-uncertainty regions or by experiments in deliberately low-texture environments. Standard estimators (e.g., Lucas-Kanade) produce no usable signal in such regions, directly affecting the “no prior knowledge” claim.
Authors: The manuscript computes and uses optical flow uncertainty to identify unreliable regions, which is the explicit mechanism for handling high-uncertainty areas by de-emphasizing them and relying on active exploratory motion to obtain usable signals from other viewpoints. This supports the no-prior-knowledge claim by avoiding dependence on any single low-texture patch. However, dedicated experiments in deliberately low-texture environments are not included, which is a limitation. We will revise the methods section to describe the uncertainty handling more explicitly and add a limitations paragraph on low-texture cases. revision: partial
Circularity Check
No circularity: experimental system paper with no derivation chain
full rationale
The manuscript presents MinNav as an experimental navigation stack for tiny aerial robots that combines monocular optical flow, uncertainty estimates, and active exploratory motion. No equations, fitted parameters, predictions, or uniqueness theorems appear in the abstract or described claims. The central result is a reported 70% success rate across real-world trials; this is an empirical outcome, not a quantity derived from or forced by any self-referential input. No self-citation load-bearing steps, ansatz smuggling, or renaming of known results are identifiable. The work is therefore self-contained as a system demonstration.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Optical flow and its uncertainty from a monocular camera, augmented by active robot motion, provide sufficient information to detect and navigate static/dynamic obstacles and unknown gaps without prior scene knowledge.
Reference graph
Works this paper leans on
-
[1]
Design and analysis of an aerial pollination system for walnut trees.Biosystems Engineering, 225:83–98, 2023
Mozhdeh Mazinani, Payam Zarafshan, Mohammad Dehghani, Kourosh Vahdati, and Hamed Etezadi. Design and analysis of an aerial pollination system for walnut trees.Biosystems Engineering, 225:83–98, 2023
2023
-
[2]
PhD thesis, University of Maryland, College Park, 2021
Nitin Jagannatha Sanket.Active Vision Based Embodied-AI Design for Nano-UA V Autonomy. PhD thesis, University of Maryland, College Park, 2021
2021
-
[3]
Michael et al
N. Michael et al. Collaborative mapping of an earthquake-damaged building via ground and aerial robots.Journal of Field Robotics, 29(5):832–841, 2012
2012
-
[4]
Quadcloud: a rapid response force with quadrotor teams
Kartik Mohta, Matthew Turpin, Alex Kushleyev, Daniel Mellinger, Nathan Michael, and Vijay Kumar. Quadcloud: a rapid response force with quadrotor teams. InExperimental Robotics: The 14th International Symposium on Experimental Robotics, pages 577–590. Springer, 2016
2016
-
[5]
The current state and future outlook of rescue robotics.Journal of Field Robotics, 36(7):1171–1191, 2019
Jeffrey Delmerico, Stefano Mintchev, Alessandro Giusti, Boris Gromov, Kamilo Melo, Tomislav Horvat, Cesar Cadena, Marco Hutter, Auke Ijspeert, Dario Floreano, et al. The current state and future outlook of rescue robotics.Journal of Field Robotics, 36(7):1171–1191, 2019
2019
-
[6]
Özaslan et al
T. Özaslan et al. Inspection of penstocks and featureless tunnel-like environments using micro UA Vs. InField and Service Robotics, pages 123–136. Springer, 2015
2015
-
[7]
Edgeflownet: 100fps@ 1w dense optical flow for tiny mobile robots.IEEE Robotics and Automation Letters, 2024
Sai Ramana Kiran Pinnama Raju, Rishabh Singh, Manoj Velmurugan, and Nitin J Sanket. Edgeflownet: 100fps@ 1w dense optical flow for tiny mobile robots.IEEE Robotics and Automation Letters, 2024
2024
-
[8]
Prgflow: Unified swap-aware deep global optical flow for aerial robot navigation.Electronics Letters, 57(16):614–617, 2021
Nitin J Sanket, Chahat Deep Singh, Cornelia Fermüller, and Yiannis Aloimonos. Prgflow: Unified swap-aware deep global optical flow for aerial robot navigation.Electronics Letters, 57(16):614–617, 2021
2021
-
[9]
Ecological robotics: Controlling behavior with optical flow
Andrew P Duchon, William H Warren, and L Pack Kaelbling. Ecological robotics: Controlling behavior with optical flow. In Proceedings of the seventeenth annual conference of the Cognitive Science Society, volume 17, page 164. Psychology Press, 1995
1995
-
[10]
Optical flow based robot obstacle avoidance.International Journal of Advanced Robotic Systems, 4(1):2, 2007
Kahlouche Souhila and Achour Karim. Optical flow based robot obstacle avoidance.International Journal of Advanced Robotic Systems, 4(1):2, 2007
2007
-
[11]
Determining optical flow
Berthold KP Horn and Brian G Schunck. Determining optical flow. 1980
1980
-
[12]
Aloimonos et al
J. Aloimonos et al. Active vision.International journal of computer vision, 1(4):333–356, 1988
1988
-
[13]
Gapflyt: Active vision based minimalist structure-less gap detection for quadrotor flight.IEEE Robotics and Automation Letters, 3(4):2799–2806, 2018
Nitin J Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller, and Yiannis Aloimonos. Gapflyt: Active vision based minimalist structure-less gap detection for quadrotor flight.IEEE Robotics and Automation Letters, 3(4):2799–2806, 2018
2018
-
[14]
Ajna: Generalized deep uncertainty for minimal perception on parsimonious robots.Science Robotics, 8(81):eadd5139, 2023
Nitin J Sanket, Chahat Deep Singh, Cornelia Fermüller, and Yiannis Aloimonos. Ajna: Generalized deep uncertainty for minimal perception on parsimonious robots.Science Robotics, 8(81):eadd5139, 2023
2023
-
[15]
Nanoflownet: Real-time dense optical flow on a nano quadcopter
Rik J Bouwmeester, Federico Paredes-Vallés, and Guido CHE De Croon. Nanoflownet: Real-time dense optical flow on a nano quadcopter. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 1996–2003. IEEE, 2023
1996
-
[16]
Wind and obstacle motion affect honeybee flight strategies in cluttered environments.Journal of Experimental Biology, 223(14):jeb222471, 2020
Nicholas P Burnett, Marc A Badger, and Stacey A Combes. Wind and obstacle motion affect honeybee flight strategies in cluttered environments.Journal of Experimental Biology, 223(14):jeb222471, 2020
2020
-
[17]
Evdodgenet: Deep dynamic obstacle dodging with event cameras
Nitin J Sanket, Chethan M Parameshwara, Chahat Deep Singh, Ashwin V Kuruttukulam, Cornelia Fermüller, Davide Scaramuzza, and Yiannis Aloimonos. Evdodgenet: Deep dynamic obstacle dodging with event cameras. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 10651–10657. IEEE, 2020
2020
-
[18]
Neuromorphic control for optic-flow-based landing of mavs using the loihi processor
Julien Dupeyroux, Jesse J Hagenaars, Federico Paredes-Vallés, and Guido CHE de Croon. Neuromorphic control for optic-flow-based landing of mavs using the loihi processor. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 96–102. IEEE, 2021
2021
-
[19]
Vision based forward sensitive reactive control for a quadrotor vtol
Jean-Luc Stevens and Robert Mahony. Vision based forward sensitive reactive control for a quadrotor vtol. In2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5232–5238. IEEE, 2018
2018
-
[20]
Traditional and modern strategies for optical flow: an investigation.SN Applied Sciences, 3:1–14, 2021
Syed Tafseer Haider Shah and Xiang Xuezhi. Traditional and modern strategies for optical flow: an investigation.SN Applied Sciences, 3:1–14, 2021
2021
-
[21]
Online lidar and vision based ego-motion estimation and mapping.PhD thesis, 2017
Ji Zhang. Online lidar and vision based ego-motion estimation and mapping.PhD thesis, 2017
2017
-
[22]
Safety-assured high-speed navigation for mavs.Science Robotics, 10(98):eado6187, 2025
Yunfan Ren, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, and Fu Zhang. Safety-assured high-speed navigation for mavs.Science Robotics, 10(98):eado6187, 2025
2025
-
[23]
Swarm of micro flying robots in the wild.Science Robotics, 7(66):eabm5954, 2022
Xin Zhou, Xiangyong Wen, Zhepei Wang, Yuman Gao, Haojia Li, Qianhao Wang, Tiankai Yang, Haojian Lu, Yanjun Cao, Chao Xu, et al. Swarm of micro flying robots in the wild.Science Robotics, 7(66):eabm5954, 2022
2022
-
[24]
Semantically-enhanced deep collision prediction for autonomous navigation using aerial robots
Mihir Kulkarni, Huan Nguyen, and Kostas Alexis. Semantically-enhanced deep collision prediction for autonomous navigation using aerial robots. In2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3056–3063. IEEE, 2023
2023
-
[25]
Flying on point clouds: Online trajectory generation and autonomous navigation for quadrotors in cluttered environments.Journal of Field Robotics, 36(4):710–733, 2019
Fei Gao, William Wu, Wenliang Gao, and Shaojie Shen. Flying on point clouds: Online trajectory generation and autonomous navigation for quadrotors in cluttered environments.Journal of Field Robotics, 36(4):710–733, 2019
2019
-
[26]
High speed navigation for quadrotors with limited onboard sensing
Sikang Liu, Michael Watterson, Sarah Tang, and Vijay Kumar. High speed navigation for quadrotors with limited onboard sensing. In2016 IEEE international conference on robotics and automation (ICRA), pages 1484–1491. IEEE, 2016
2016
-
[27]
Autonomous drone racing: A survey.arXiv e-prints, pp
Drew Hanover, Antonio Loquercio, Leonard Bauersfeld, Angel Romero, Robert Penicka, Yunlong Song, Giovanni Cioffi, Elia Kaufmann, and Davide Scaramuzza. Autonomous drone racing: A survey.arXiv e-prints, pp. arXiv–2301, 2023
2023
-
[28]
Reaching the limit in autonomous racing: Optimal control versus reinforcement learning.Science Robotics, 8(82):eadg1462, 2023
Yunlong Song, Angel Romero, Matthias Müller, Vladlen Koltun, and Davide Scaramuzza. Reaching the limit in autonomous racing: Optimal control versus reinforcement learning.Science Robotics, 8(82):eadg1462, 2023
2023
-
[29]
Champion-level drone racing using deep reinforcement learning.Nature, 620(7976):982–987, 2023
Elia Kaufmann, Leonard Bauersfeld, Antonio Loquercio, Matthias Müller, Vladlen Koltun, and Davide Scaramuzza. Champion-level drone racing using deep reinforcement learning.Nature, 620(7976):982–987, 2023
2023
-
[30]
Learning to fly in seconds.arXiv preprint arXiv:2311.13081, 2023
Jonas Eschmann, Dario Albani, and Giuseppe Loianno. Learning to fly in seconds.arXiv preprint arXiv:2311.13081, 2023
-
[31]
End-to-end neural network based optimal quadcopter control.Robotics and Autonomous Systems, 172:104588, 2024
Robin Ferede, Guido de Croon, Christophe De Wagter, and Dario Izzo. End-to-end neural network based optimal quadcopter control.Robotics and Autonomous Systems, 172:104588, 2024
2024
-
[32]
Landing with time-to-contact and ventral optic flow estimates.Journal of Guidance, Control, and Dynamics, 35(4):1362–1367, 2012
Dario Izzo and Guido De Croon. Landing with time-to-contact and ventral optic flow estimates.Journal of Guidance, Control, and Dynamics, 35(4):1362–1367, 2012
2012
-
[33]
Sanket et al
N. Sanket et al. GapFlyt: Active vision based minimalist structure-less gap detection for quadrotor flight.IEEE Robotics and Automation Letters, 3(4):2799–2806, Oct 2018
2018
-
[34]
Unsupervised deep epipolar flow for stationary or dynamic scenes
Yiran Zhong, Pan Ji, Jianyuan Wang, Yuchao Dai, and Hongdong Li. Unsupervised deep epipolar flow for stationary or dynamic scenes. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 12095–12104, 2019
2019
-
[35]
Competitive collaboration: Joint unsupervised learning of depth, camera motion, optical flow and motion segmentation
Anurag Ranjan, Varun Jampani, Lukas Balles, Kihwan Kim, Deqing Sun, Jonas Wulff, and Michael J Black. Competitive collaboration: Joint unsupervised learning of depth, camera motion, optical flow and motion segmentation. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 12240–12249, 2019
2019
-
[36]
Revisiting active perception.Autonomous Robots, pages 1–20, 2017
Ruzena Bajcsy et al. Revisiting active perception.Autonomous Robots, pages 1–20, 2017
2017
-
[37]
Princeton University Press, 2023
Lars Chittka.The mind of a bee. Princeton University Press, 2023
2023
-
[38]
Gap perception in bumblebees.Journal of Experimental Biology, 222(2):jeb184135, 2019
Sridhar Ravi, Olivier Bertrand, Tim Siesenop, Lea-Sophie Manz, Charlotte Doussot, Alex Fisher, and Martin Egelhaaf. Gap perception in bumblebees.Journal of Experimental Biology, 222(2):jeb184135, 2019
2019
-
[39]
Nitin J Sanket, Chahat Deep Singh, Chethan M Parameshwara, Cornelia Fermüller, Guido CHE de Croon, and Yiannis Aloimonos. Evpropnet: Detecting drones by finding propellers for mid-air landing and following.arXiv preprint arXiv:2106.15045, 2021
-
[40]
Nudgeseg: Zero-shot object segmentation by repeated physical interaction
Chahat Deep Singh, Nitin J Sanket, Chethan M Parameshwara, Cornelia Fermüller, and Yiannis Aloimonos. Nudgeseg: Zero-shot object segmentation by repeated physical interaction. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2714–2712. IEEE, 2021
2021
-
[41]
Optical flow estimation using a spatial pyramid network, 2016
2016
-
[42]
Dosovitskiy, P
A. Dosovitskiy, P. Fischer, E. Ilg, P. Häusser, C. Hazırba¸ s, V . Golkov, P. v.d. Smagt, D. Cremers, and T. Brox. Flownet: Learning optical flow with convolutional networks. InIEEE International Conference on Computer Vision (ICCV), 2015
2015
-
[43]
E. Ilg, T. Saikia, M. Keuper, and T. Brox. Occlusions, motion and depth boundaries with a generic network for disparity, optical flow or scene flow estimation. InEuropean Conference on Computer Vision (ECCV), 2018
2018
-
[44]
N. Mayer, E. Ilg, P. Häusser, P. Fischer, D. Cremers, A. Dosovitskiy, and T. Brox. A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. InIEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2016. arXiv:1512.02134
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[45]
Bumblebees display characteristics of active vision during robust obstacle avoidance flight.Journal of Experimental Biology, 225(4):jeb243021, 2022
Sridhar Ravi, Tim Siesenop, Olivier J Bertrand, Liang Li, Charlotte Doussot, Alex Fisher, William H Warren, and Martin Egelhaaf. Bumblebees display characteristics of active vision during robust obstacle avoidance flight.Journal of Experimental Biology, 225(4):jeb243021, 2022
2022
-
[46]
Hang Yu, Guido CH de Croon, and Christophe De Wagter. Avoidbench: A high-fidelity vision-based obstacle avoidance benchmarking suite for multi-rotors.arXiv preprint arXiv:2301.07430, 2023
-
[47]
Worldgen: A large scale generative simulator
Chahat Deep Singh, Riya Kumari, Cornelia Fermüller, Nitin J Sanket, and Yiannis Aloimonos. Worldgen: A large scale generative simulator. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 9147–9154. IEEE, 2023
2023
-
[48]
Autoflow: Learning a better training set for optical flow
Deqing Sun, Daniel Vlasic, Charles Herrmann, Varun Jampani, Michael Krainin, Huiwen Chang, Ramin Zabih, William T Freeman, and Ce Liu. Autoflow: Learning a better training set for optical flow. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 10093–10102, 2021
2021
-
[49]
0-mms: Zero-shot multi-motion segmentation with a monocular event camera
Chethan M Parameshwara, Nitin J Sanket, Chahat Deep Singh, Cornelia Fermüller, and Yiannis Aloimonos. 0-mms: Zero-shot multi-motion segmentation with a monocular event camera. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 9594–9600. IEEE, 2021
2021
-
[50]
Morpheyes: Variable baseline stereo for quadrotor navigation
Nitin J Sanket, Chahat Deep Singh, Varun Asthana, Cornelia Fermüller, and Yiannis Aloimonos. Morpheyes: Variable baseline stereo for quadrotor navigation. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 413–419. IEEE, 2021
2021
-
[51]
Reiner Birkl, Diana Wofk, and Matthias Müller. Midas v3.1 – a model zoo for robust monocular relative depth estimation.arXiv preprint arXiv:2307.14460, 2023
-
[52]
Vision transformers for dense prediction.ICCV, 2021
René Ranftl, Alexey Bochkovskiy, and Vladlen Koltun. Vision transformers for dense prediction.ICCV, 2021
2021
-
[53]
Towards robust monocular depth estimation: Mixing datasets for zero-shot cross-dataset transfer.IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(3), 2022
René Ranftl, Katrin Lasinger, David Hafner, Konrad Schindler, and Vladlen Koltun. Towards robust monocular depth estimation: Mixing datasets for zero-shot cross-dataset transfer.IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(3), 2022
2022
-
[54]
Raft: Recurrent all-pairs field transforms for optical flow
Zachary Teed and Jia Deng. Raft: Recurrent all-pairs field transforms for optical flow. InComputer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part II 16, pages 402–419. Springer, 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.