Quantitative Promise Theory: Intentionality and Inference in Autonomous Agents
Pith reviewed 2026-06-27 18:51 UTC · model grok-4.3
The pith
Boundary conditions act as promises that define scalable intent and let autonomous agents form information-minimizing swarms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
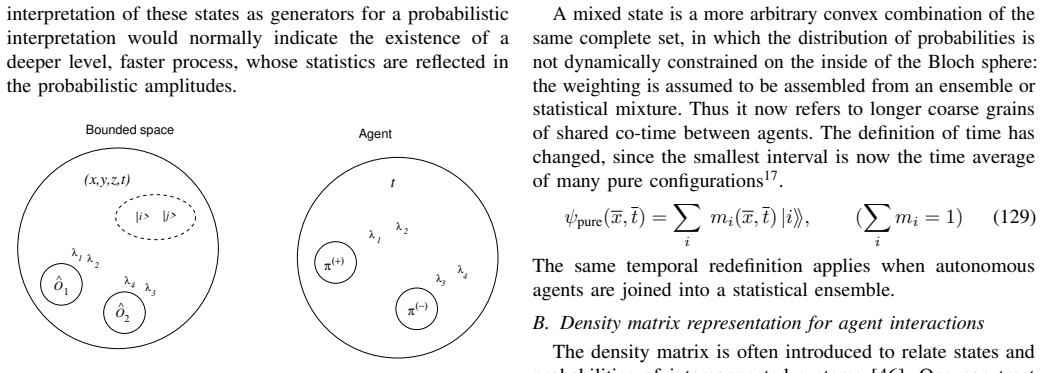
Supplementing promise semantics with Bayesian probability and information optimization preserves local coordination. Boundary conditions serve as promises that constrain states and select thresholds. Agent alignment thereby supplies a scalable definition of intent. Autonomous agents may then congeal into swarms with superagent characteristics by minimizing information despite uncertainty that works to maximize it.
What carries the argument
Promise semantics augmented by Bayesian probability and information-theoretic optimization, in which boundary conditions function as promises that constrain states and define intent through alignment.
Load-bearing premise
Promise Theory semantics can be preserved and supplemented with Bayesian probability without reintroducing non-local coordination or normalization.
What would settle it
A concrete comparison of agent simulations that either include or omit promise-defined boundary conditions, checking whether information minimization produces observable swarm behavior only in the promise case.
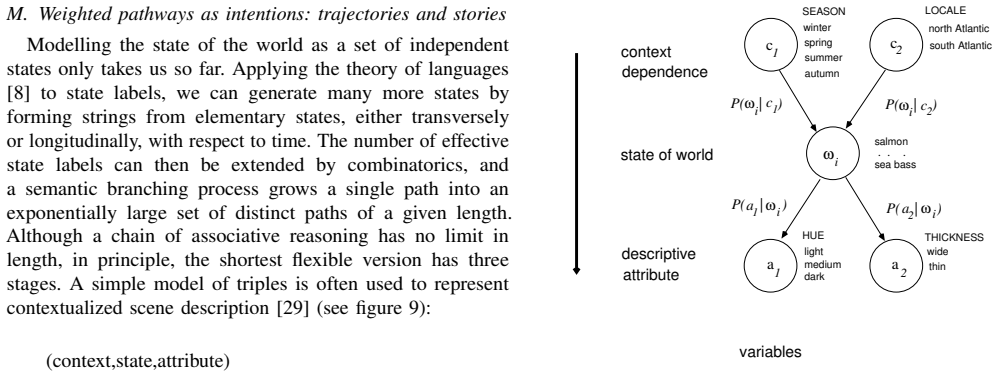
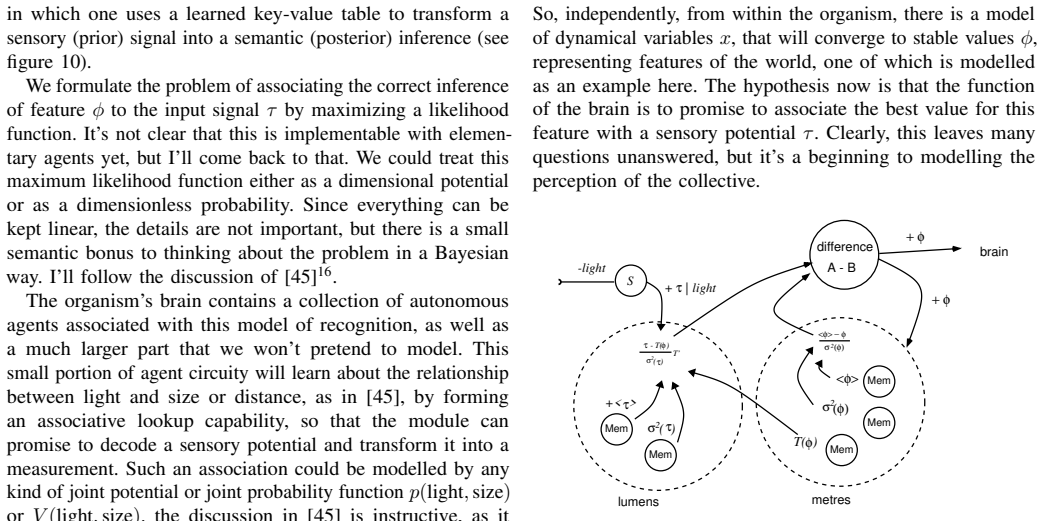
Figures
read the original abstract
I discuss some quantitative representations of Promise Theory for processes involving autonomous agents. Agent models are common in software systems, machine learning, and biology, for example, but may also apply to physics and other forms of engineering. I describe how Bayesian probability and information theoretic optimization, including Active Inference, may be incorporated with promise semantics -- as well as how Promise Theory supplements solutions, helping to avoid probability's pitfalls, which include non-local coordination, calibrating, and normalizing probabilistic computations. The role of boundary conditions in constraining allowed states and selecting decision thresholds is a form of promise, and agent alignment provides a scalable definition of intent. Autonomous agents may congeal into swarms with superagent characteristics by trying to minimize their information, despite uncertainty that works to maximize it. The use of Promise Theory involves some research challenges as well as stylistic preferences.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript offers a conceptual discussion of quantitative representations of Promise Theory applied to autonomous agents. It proposes incorporating Bayesian probability and information-theoretic optimization (including Active Inference) with promise semantics to model intentionality and inference, arguing that Promise Theory helps avoid pitfalls such as non-local coordination and normalization in probabilistic methods. Boundary conditions are framed as promises that constrain states and thresholds, agent alignment is presented as a scalable definition of intent, and agents are suggested to form swarms with superagent properties by minimizing information despite uncertainty maximizing it. The work also notes research challenges and stylistic preferences in applying the theory.
Significance. If the suggested integration can be formalized, the framework could meaningfully bridge Promise Theory with contemporary approaches in multi-agent AI, active inference, and biological modeling by supplying local, semantics-preserving mechanisms for intent and coordination. This would be particularly valuable in domains where non-local probabilistic computations are undesirable, potentially enabling more scalable definitions of alignment and swarm behavior.
major comments (2)
- [Abstract] Abstract: The central proposal that Bayesian probability and information-theoretic methods 'may be incorporated with promise semantics' while avoiding non-local coordination and normalization pitfalls is stated without any derivation, formal mapping, or concrete example showing how the combination is achieved or verified.
- [Abstract] Abstract: The claim that 'autonomous agents may congeal into swarms with superagent characteristics by trying to minimize their information' is presented as a possible outcome but lacks any supporting model, optimization objective, or boundary-condition analysis that would make the statement quantitative or testable.
Simulated Author's Rebuttal
We thank the referee for their constructive review and for recognizing the potential value of integrating Promise Theory with Bayesian and information-theoretic approaches. The comments correctly identify that the manuscript is a conceptual discussion rather than a fully formalized framework. We address each point below and will revise the abstract and relevant sections to better reflect the exploratory scope and to frame certain statements more precisely as proposals for future investigation.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central proposal that Bayesian probability and information-theoretic methods 'may be incorporated with promise semantics' while avoiding non-local coordination and normalization pitfalls is stated without any derivation, formal mapping, or concrete example showing how the combination is achieved or verified.
Authors: The manuscript opens by describing itself as a discussion of quantitative representations and explicitly frames the integration as a possibility ('may be incorporated') rather than a completed formal result. The body text elaborates qualitative mappings, such as the use of promises to supply local boundary conditions and semantics that complement probabilistic methods, while noting pitfalls like non-local coordination. No derivation or concrete example is supplied because the work is intended to outline a research direction, not to deliver a finished theory. We will revise the abstract to state the conceptual and suggestive character of the proposals more explicitly and will add a short illustrative scenario in the main text to clarify the intended complementarity. revision: yes
-
Referee: [Abstract] Abstract: The claim that 'autonomous agents may congeal into swarms with superagent characteristics by trying to minimize their information' is presented as a possible outcome but lacks any supporting model, optimization objective, or boundary-condition analysis that would make the statement quantitative or testable.
Authors: The statement is presented as a hypothesis that follows from the earlier discussion of information minimization under promise alignment and uncertainty maximization. The manuscript does not supply an optimization objective or quantitative model for swarm formation; a dedicated section already lists research challenges associated with making such ideas operational. We agree that the phrasing in the abstract could be read as stronger than intended. We will revise the abstract to present the swarm-formation idea explicitly as a suggested direction for future quantitative work rather than an established outcome, and we will cross-reference the existing challenges section. revision: yes
Circularity Check
No significant circularity; conceptual discussion only
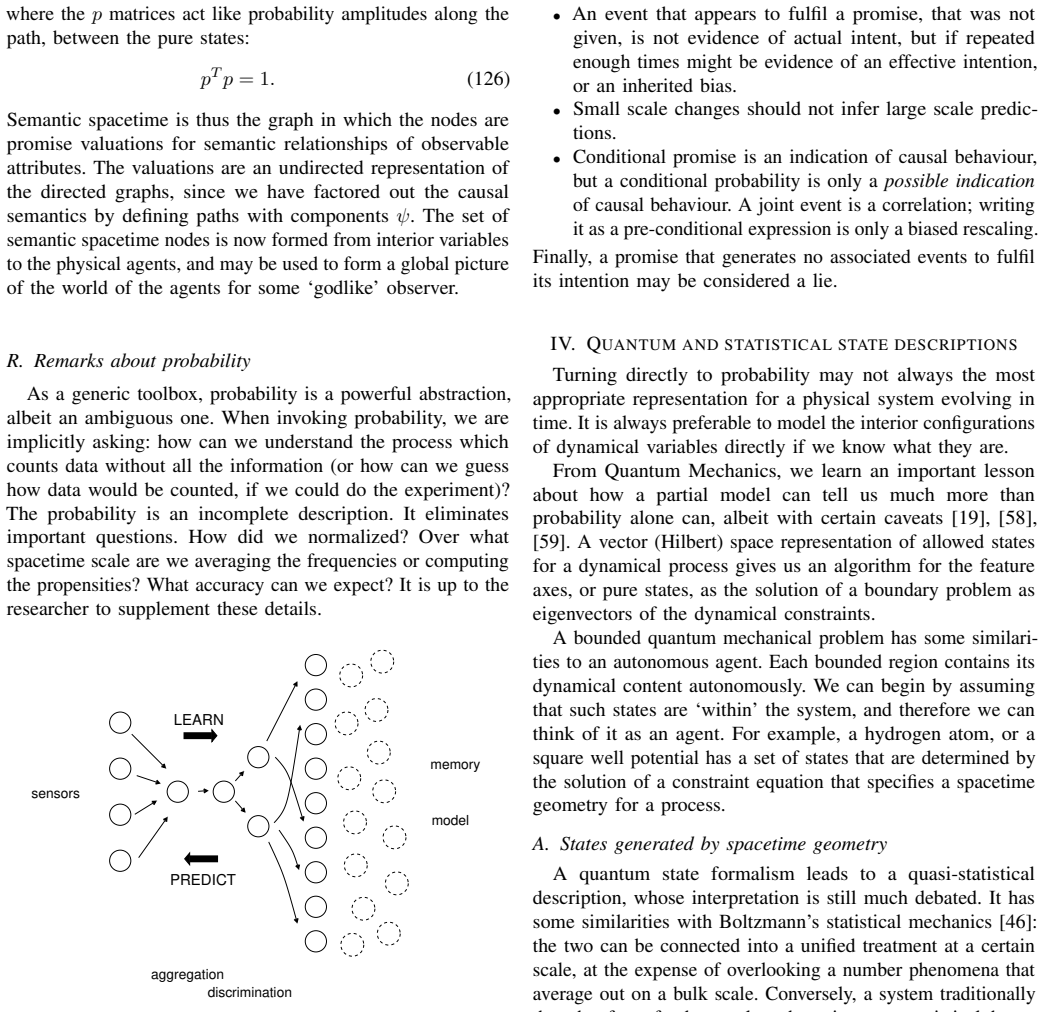
full rationale
The manuscript is framed as a conceptual discussion of how Promise Theory semantics might be supplemented by Bayesian probability and information-theoretic methods (including Active Inference). No formal derivations, equations, quantitative predictions, or first-principles results are presented in the abstract or described in the full-text placeholder. The central claims concern possible incorporations and boundary-condition interpretations rather than any derivation chain that could reduce to its own inputs. Self-reference to the author's prior Promise Theory framework is normal for an originator and does not meet the criteria for load-bearing circularity because no unsubstantiated quantitative step relies on it. The paper is therefore self-contained as discussion and receives the default non-finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Promise Theory can be combined with Bayesian probability and active inference while preserving its core semantics and avoiding probability's coordination pitfalls.
Reference graph
Works this paper leans on
-
[1]
Bergstra and M
J.A. Bergstra and M. Burgess.Promise Theory: Principles and Applications (second edition).χtAxisPress, 2014,2019
2014
-
[2]
An approach to understanding policy based on autonomy and voluntary cooperation
Mark Burgess. An approach to understanding policy based on autonomy and voluntary cooperation. InIFIP/IEEE 16th international workshop on distributed systems operations and management (DSOM), in LNCS 3775, pages 97–108, 2005
2005
-
[3]
Wooldridge.An Introduction to MultiAgent Systems
M. Wooldridge.An Introduction to MultiAgent Systems. Wiley, Chichester, 2002
2002
-
[4]
Popper.Observation and Interpretation, chapter The Propensity Interpretation of the Calculus of Probability, and The Quantum Theory
K. Popper.Observation and Interpretation, chapter The Propensity Interpretation of the Calculus of Probability, and The Quantum Theory. Butterworths, London, 1957
1957
-
[5]
Englert, editor.Julian Schwinger, Quantum Mechanics: Symbolism of Atomic Measurement
B.G. Englert, editor.Julian Schwinger, Quantum Mechanics: Symbolism of Atomic Measurement. Springer, 2001
2001
-
[6]
Shannon and W
C.E. Shannon and W. Weaver.The Mathematical Theory of Communica- tion. University of Illinois Press, Urbana, 1949
1949
-
[7]
Cover and J.A
T.M. Cover and J.A. Thomas.Elements of Information Theory. (J.Wiley & Sons., New York), 1991
1991
-
[8]
Lewis and C
H. Lewis and C. Papadimitriou.Elements of the Theory of Computation, Second edition. Prentice Hall, New York, 1997
1997
-
[9]
M. Burgess. Spacetimes with semantics (i).arXiv:1411.5563, 2014
Pith/arXiv arXiv 2014
-
[10]
M. Burgess. Spacetimes with semantics (ii).arXiv.org:1505.01716, 2015
Pith/arXiv arXiv 2015
-
[11]
M. Burgess. Spacetimes with semantics (iii).arXiv:1608.02193, 2016
Pith/arXiv arXiv 2016
-
[12]
M. Burgess. Motion of the third kind (i) notes on the causal structure of virtual processes for privileged observers. DOI: 10.13140/RG.2.2.30483.35361 (notes available on Researchgate), 2021
-
[13]
M. Burgess. Motion of the third kind (ii) notes on kinematics, dynamics, and relativity. (notes available on Researchgate), 2022
2022
-
[14]
M. Burgess. Motion of the third kind (iii): On the semantics of motion in discrete spacetimes and evolutionary selection. (notes available on Researchgate), 2024
2024
-
[15]
M. Burgess. Two dimensional time-series for anomaly detection and regulation in adaptive systems.Lecture Notes in Computer Science, IFIP/IEEE 13th International Workshop on Distributed Systems: Opera- tions and Management (DSOM 2002), 2506:169, 2002
2002
-
[16]
M. Burgess. Probabilistic anomaly detection in distributed computer networks.Science of Computer Programming, 60(1):1–26, 2006
2006
-
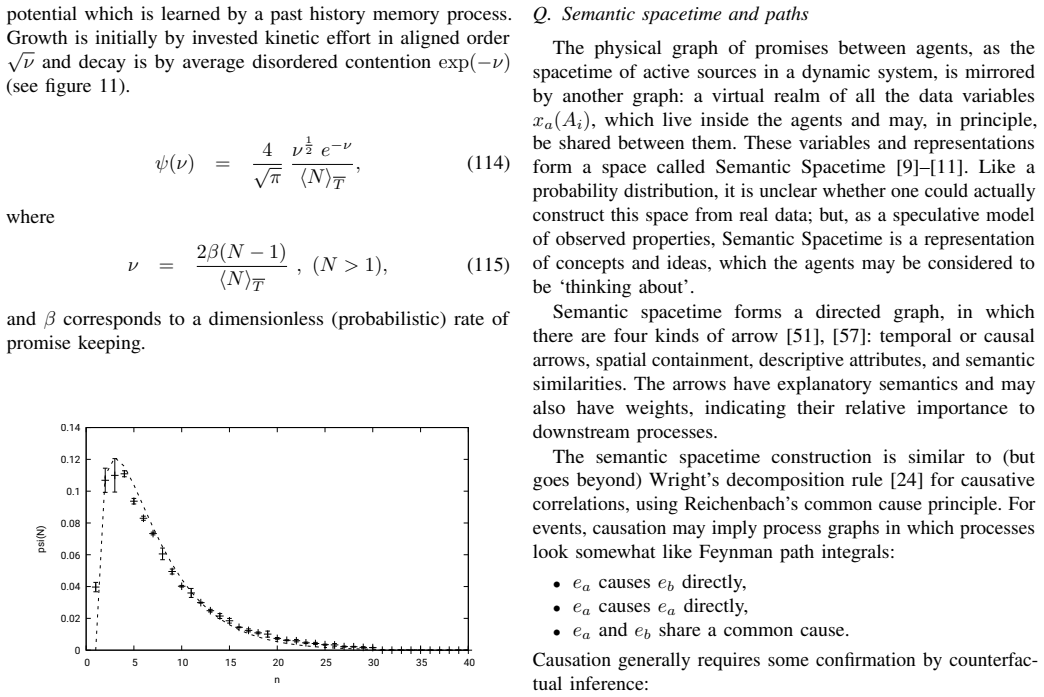
[17]
Bjelland, M
J. Bjelland, M. Burgess, G. Canright, and K. Engø-Monsen. Eigenvectors of directed graphs and importance scores: dominance, t-rank, and sink remedies.Data Mining and Knowledge Discovery, 20(1):98–151, 2010
2010
-
[18]
Galam.Sociophysics
S. Galam.Sociophysics. Springer, 2012
2012
-
[19]
Ballentine.Quantum Mechanics: A Modern Development
L.E. Ballentine.Quantum Mechanics: A Modern Development. World Scientific, 1998
1998
-
[20]
Pearl.Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference
J. Pearl.Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. Morgen Kaufmann, San Francisco, 1988
1988
-
[21]
Grimmett and D.R
G.R. Grimmett and D.R. Stirzaker.Probability and random processes (3rd edition). Oxford scientific publications, Oxford, 2001
2001
-
[22]
Testing the quantitative spacetime hypothesis using artificial narrative comprehension (i) : Bootstrapping meaning from episodic narrative viewed as a feature landscape, 2020
Mark Burgess. Testing the quantitative spacetime hypothesis using artificial narrative comprehension (i) : Bootstrapping meaning from episodic narrative viewed as a feature landscape, 2020
2020
-
[23]
Hebb.The Organization of Behavior
D.O. Hebb.The Organization of Behavior. Wiley & Sons, 1949
1949
-
[24]
Korb and A.E
K.B. Korb and A.E. Nicholson.Bayesian Artificial Intelligence. Chapman and Hall, 2004
2004
-
[25]
McInerney, R
J. McInerney, R. Ranganath, and D.M. Blei. The population posterior and bayesian inference on streams, 2015
2015
-
[26]
Reif.Fundamentals of statistical mechanics
F. Reif.Fundamentals of statistical mechanics. McGraw-Hill, 1965
1965
-
[27]
Wiener.Cybernetics or Control and Communication in the Animal and the Machine
N. Wiener.Cybernetics or Control and Communication in the Animal and the Machine. MIT Press, 1948. 29
1948
-
[28]
Continuous integration of data histories into consistent namespaces
Mark Burgess and Andr´as Gerlits. Continuous integration of data histories into consistent namespaces. 2022
2022
-
[29]
Duda, P.E
R.O. Duda, P.E. Hart, and D.G. Stork.Pattern classification. Wiley Interscience, New York, 2001
2001
-
[30]
M. Burgess. Describe the scene! the investment in context. Medium, April 2026
2026
-
[31]
Rapoport.N-Person Game Theory: Concepts and Applications
A. Rapoport.N-Person Game Theory: Concepts and Applications. Dover, New York, 1970
1970
-
[32]
Myerson.Game theory: Analysis of Conflict
R.B. Myerson.Game theory: Analysis of Conflict. (Harvard University Press, Cambridge, MA), 1991
1991
-
[33]
Strassner.Handbook of Network and System Administration, chapter Knowledge Engineering Using Ontologies
J. Strassner.Handbook of Network and System Administration, chapter Knowledge Engineering Using Ontologies. Elsevier Handbook, 2007
2007
-
[34]
Fanizzi, C
N. Fanizzi, C. d’Amato, and F. Esposito. Machine learning methods for ontology mining.Semantic Computing, pages 131–153, 07 2010
2010
-
[35]
Dietz.Enterprise ontology
J.L.G. Dietz.Enterprise ontology. Springer, 2006
2006
-
[36]
Bishop and H
C.M. Bishop and H. Bishop.Deep Learning. Springer, 2023
2023
-
[37]
Burgess.A Treatise on Systems: Volume 1: Analytical description of human-information networks
M. Burgess.A Treatise on Systems: Volume 1: Analytical description of human-information networks. in progress, 2004-
2004
-
[38]
Burgess and S
M. Burgess and S. Fagernes. Norms and swarms.Lecture Notes on Computer Science, 4543 (Proceedings of the first International Conference on Autonomous Infrastructure and Security (AIMS)):107–118, 2007
2007
-
[39]
Rao and D.H
R.P.N. Rao and D.H. Ballard. Predictive coding in the visual cortex: a functional interpretation of some extra-classical receptive-field effects. Nature Neuroscience, 2(1):79–87, 1999
1999
-
[40]
B. Millidge, A.K. Seth, and C.L. Buckley. Predictive coding: a theoretical and experimental review.CoRR, abs/2107.12979, 2021
arXiv 2021
-
[41]
K. Friston. A theory of cortical responses.Philosophical Transactions of the Royal Society B: Biological Sciences, 360(1456):815–836, 04 2005
2005
-
[42]
K. Friston. The free-energy principle: a unified brain theory?Nature Reviews Neuroscience, 11:127–138, 2010
2010
-
[43]
K. Friston. The free-energy principle: a rough guide to the brain?Trends in Cognitive Sciences, 13:293–301, 2009
2009
-
[44]
T. Parr, G. Pezzulo, and K.J. Friston.Active Inference: the Free Energy Principle in Mind, Brain, and Behavior. MIT Press, 2022
2022
-
[45]
R. Bogacz. A tutorial on the free-energy framework for modelling perception and learning.Journal of Mathematical Psychology, 76:198– 211, 2017. Model-based Cognitive Neuroscience
2017
-
[46]
Feynman.Statistical Mechanics
R.P. Feynman.Statistical Mechanics. Addison Wesley, 1972
1972
-
[47]
M. Burgess. Configurable immunity model of evolving configuration management.Science of Computer Programming, 51:197, 2004
2004
-
[48]
R. Cao. New labels for old ideas: Predictive processing and the interpretation of neural signals.Biology & Philosophy, 35(5):52, 2020
2020
-
[49]
Applications of the free energy principle to machine learning and neuroscience (thesis), 2021
Beren Millidge. Applications of the free energy principle to machine learning and neuroscience (thesis), 2021
2021
-
[50]
Zemansky and R.H
M.W. Zemansky and R.H. Dittman.Heat and Thermodynamics. McGraw- Hill, 1981
1981
-
[51]
M. Burgess. Agent semantics, semantic spacetime, and graphical reasoning, arxiv cs.ai 2506.07756, 2025
arXiv 2025
-
[52]
M. Burgess. Notes on trust as a causal basis for social science. SSRN Archive, available at http://dx.doi.org/10.2139/ssrn.4252501 (DOI: 10.2139/ssrn.4252501), August 2022
-
[53]
M. Burgess and R.I.M. Dunbar. A promise theory perspective on the role of intent in group dynamics.arXiv:2402.00598 [cs.SI], 2023
arXiv 2023
-
[54]
Dunbar.Grooming, Gossip and the Evolution of Language
R. Dunbar.Grooming, Gossip and the Evolution of Language. Faber and Faber, London, 1996
1996
-
[55]
W.X. Zhou, S. Sornette, R.A. Hill, and R.I.M. Dunbar. Discrete hierarchical organization of social group sizes.Proc. Royal Soc., 272:439– 444, 2004
2004
-
[56]
M. Burgess and R.I.M. Dunbar. Group related phenomena in wikipedia edits.arXiv:2402.00595 [cs.SI], 2023
arXiv 2023
-
[57]
M. Burgess. γ(3,4) ‘attention’ in cognitive agents: Ontology-free knowledge representations with promise theoretic semantics, 2026
2026
-
[58]
The collapse of a quantum state as a joint probability construction.Journal of Physics A: Mathematical and Theoretical, 55(25):254006, June 2022
Peter Morgan. The collapse of a quantum state as a joint probability construction.Journal of Physics A: Mathematical and Theoretical, 55(25):254006, June 2022
2022
-
[59]
Wetterich
C. Wetterich. Quantum formalism for classical statistics.Annals of Physics, 393:1–70, 2018
2018
-
[60]
O.C. Granmo. The tsetlin machine - a game theoretic bandit driven approach to optimal pattern recognition with propositional logic.ArXiv, abs/1804.01508, 2018
arXiv 2018
-
[61]
Bonabeau, M
E. Bonabeau, M. Dorigo, and G. Theraulaz.Swarm Intelligence: From Natural to Artificial Systems. Oxford University Press, Oxford, 1999
1999
-
[62]
Kennedy and R.C
J. Kennedy and R.C. Eberhart.Swarm Intelligence. Morgan Kaufmann (Academic Press), 2001
2001
-
[63]
Arlotti, A
L. Arlotti, A. Deutsch, and M. Lachowicz. On a discrete boltzmann type model of swarming.Math. Comp. Model, 41:1193–1201, 2005
2005
-
[64]
PhD thesis, California Institute of Technology, 2000
Kazadi S.Swarm Engineering. PhD thesis, California Institute of Technology, 2000
2000
-
[65]
R.P. Feynman. There’s plenty of room at the bottom.Engineering and Science, 23(5):22–36, 1960. 30
1960
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.