DroneShield-AI: A Multi-Modal Sensor Fusion Framework for Real-Time Autonomous Drone Threat Detection, Behavioral Intent Classification, and Swarm Intelligence in Contested Airspace
Pith reviewed 2026-06-27 10:36 UTC · model grok-4.3
The pith
A multi-modal fusion framework with a six-class behavioral taxonomy detects drone threats at 96.1 percent accuracy and 142 millisecond latency on commodity hardware.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
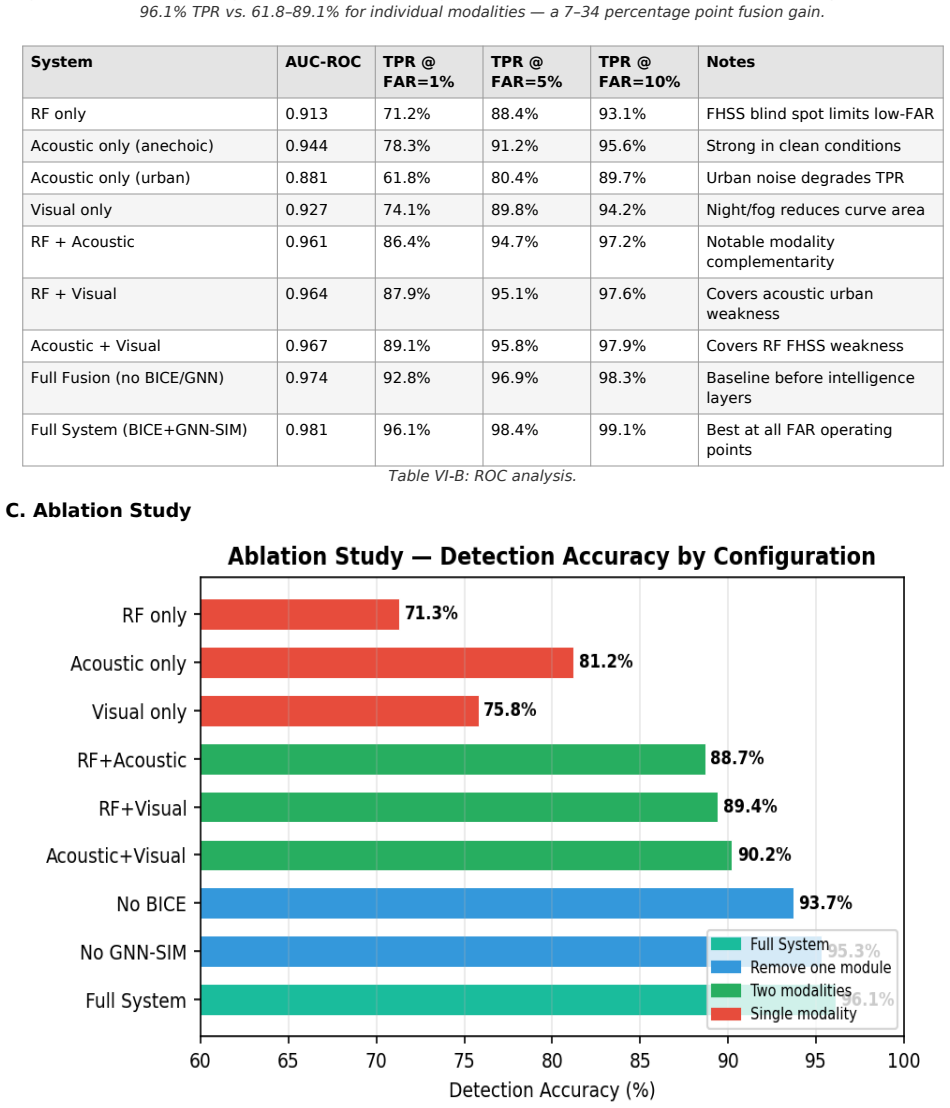
DroneShield-AI establishes that combining RF signal classification, acoustic detection, YOLOv8 visual detection, evidence-weighted sensor fusion, the Behavioral Intent Classification Engine with its six-class threat taxonomy, and the Graph Neural Network Swarm Intelligence Module produces 96.1 percent detection accuracy, a 3.2 percent false alarm rate, 0.981 AUC-ROC, and 142 millisecond end-to-end latency on commodity CPU hardware costing 500 to 780 dollars, while enabling 30-second advance warnings and open analysis of adversarial multi-drone formations.
What carries the argument
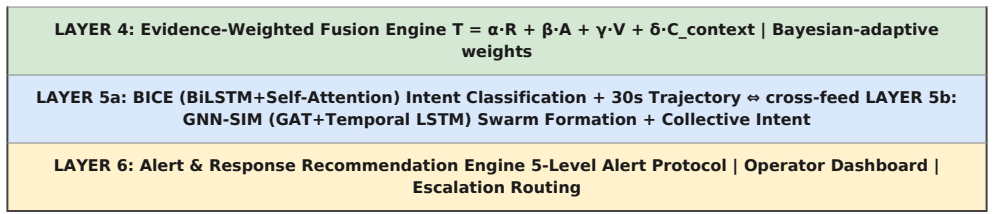
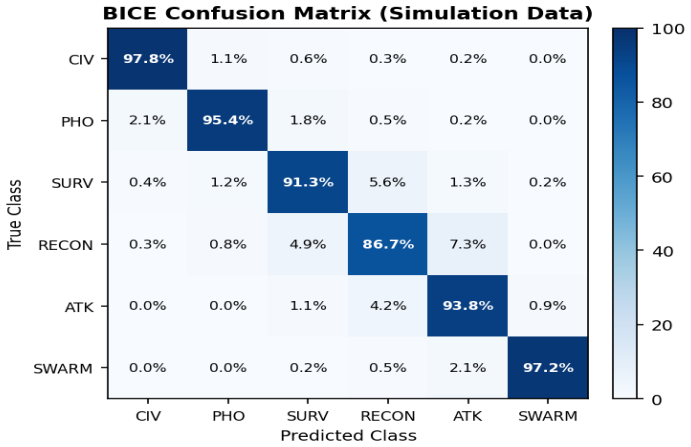
Evidence-weighted sensor fusion integrated with the Behavioral Intent Classification Engine (BICE) that applies a six-class threat taxonomy to drone flight patterns.
If this is right
- Predictive alerts for operator intent become available with a 30-second advance-warning horizon.
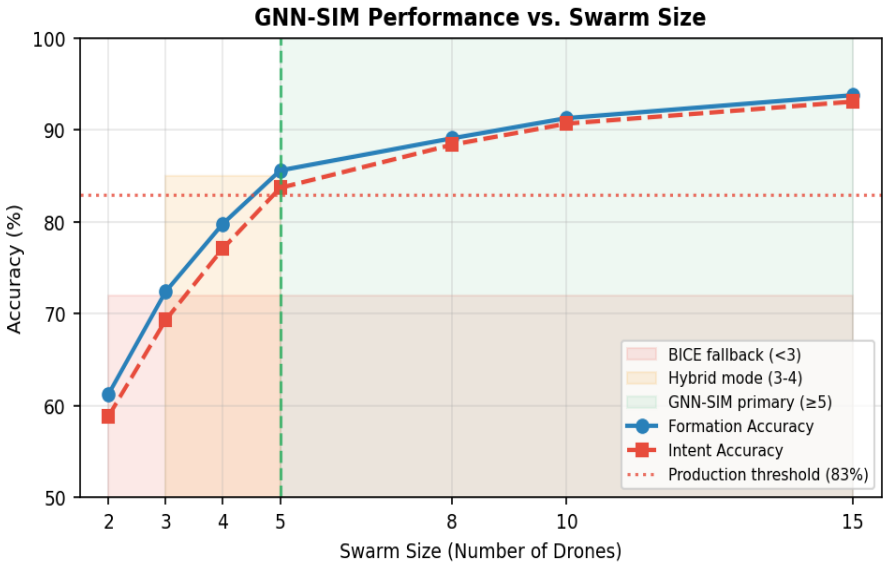
- Adversarial multi-drone formation analysis is possible using Graph Attention Networks in an open framework.
- The complete pipeline meets real-time constraints at 142 milliseconds latency on inexpensive CPU hardware.
- Public release of code, model weights, and simulation datasets enables direct replication and further testing.
Where Pith is reading between the lines
- Testing the six-class taxonomy on drone data collected in different weather or urban conditions would check whether the reported accuracy holds.
- The swarm analysis module could be extended to formations larger than those in the original datasets to measure scaling behavior of the graph attention networks.
- The low hardware cost and open release create a practical path for integrating the pipeline with existing ground-based monitoring stations.
Load-bearing premise
The evidence-weighted fusion weights and six-class behavioral taxonomy derived from the three datasets will perform similarly on new drone operations and environments.
What would settle it
Performance measurement on a fourth independent real-world drone dataset that yields detection accuracy below 90 percent or a false alarm rate above 10 percent.
Figures
read the original abstract
Unmanned Aerial Vehicle (UAV) threats have emerged as a defining security challenge of the 21st century. This paper presents DroneShield-AI, a unified open framework integrating six processing layers: RF signal classification, acoustic motor-signature detection, YOLOv8-based visual detection, evidence-weighted sensor fusion, a Behavioral Intent Classification Engine (BICE), and a Graph Neural Network Swarm Intelligence Module (GNN-SIM). BICE introduces the first systematic six-class threat taxonomy for drone flight patterns, enabling predictive operator alerts with a 30-second advance-warning horizon. GNN-SIM is the first open framework for adversarial multi-drone formation analysis using Graph Attention Networks. Evaluated on three publicly available real-world datasets, the fused pipeline achieves 96.1% detection accuracy, 3.2% false alarm rate, AUC-ROC: 0.981, and 142ms end-to-end latency on commodity CPU-class hardware at approximately $500-$780 USD total system cost. All code, model weights, and simulation datasets are publicly released at submission.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents DroneShield-AI, a multi-modal open framework for real-time drone threat detection that fuses RF signal classification, acoustic motor-signature detection, YOLOv8-based visual detection, evidence-weighted sensor fusion, the Behavioral Intent Classification Engine (BICE) with a six-class threat taxonomy, and the Graph Neural Network Swarm Intelligence Module (GNN-SIM). It reports concrete performance numbers—96.1% detection accuracy, 3.2% false alarm rate, AUC-ROC 0.981, and 142 ms end-to-end latency on commodity CPU hardware at $500–780 total system cost—obtained on three publicly available real-world datasets, with all code, model weights, and simulation datasets released at submission.
Significance. If the reported metrics are reproducible from the released artifacts, the work supplies a practical, low-cost, open-source pipeline for autonomous drone detection and introduces two new components (BICE taxonomy and GNN-SIM) that could serve as baselines for behavioral intent and swarm analysis research. The explicit public release of code, weights, and datasets is a clear strength that makes the central empirical claims directly falsifiable.
minor comments (1)
- The abstract and introduction repeatedly use the qualifier 'first' for BICE and GNN-SIM; a short related-work paragraph explicitly contrasting the six-class taxonomy against prior drone-behavior taxonomies would strengthen this claim without altering the technical contribution.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript, recognition of the open-source release as a strength, and recommendation to accept. We appreciate the emphasis on reproducibility and the potential of BICE and GNN-SIM as baselines.
Circularity Check
No significant circularity identified
full rationale
The paper reports concrete empirical performance metrics (96.1% accuracy, 3.2% FAR, AUC 0.981, 142 ms latency) obtained on three publicly available real-world datasets, with code, weights, and simulation datasets released. The central claims are falsifiable by re-running the artifacts on the named datasets; no equations, fitted parameters renamed as predictions, or self-citation chains are present that would reduce the reported results to the inputs by construction. The six-class taxonomy and GNN-SIM are introduced as novel contributions validated on external data rather than derived tautologically from prior self-work.
Axiom & Free-Parameter Ledger
invented entities (2)
-
Behavioral Intent Classification Engine (BICE) with six-class threat taxonomy
no independent evidence
-
Graph Neural Network Swarm Intelligence Module (GNN-SIM)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
and Kofman, M
Bendett, S. and Kofman, M. (2024). Drone Warfare in the Russia-Ukraine Conflict: Operational Patterns and Counter-Measures. Center for Naval Analyses, Arlington VA
2024
-
[2]
Final Report: UAV Use by Non-State Armed Groups in Eastern DRC
United Nations Group of Experts on the DRC (2024). Final Report: UAV Use by Non-State Armed Groups in Eastern DRC. UN Security Council Document S/2024/432. [2b] AFC/M23 (2026, February 24). Confirmation of the death of Lt. Col. Willy Ngoma, military spokesperson of the AFC/M23. Official statement, Goma. Confirmed by Reuters (Dakar bureau, Feb. 24, 2026), ...
2024
-
[3]
Hambling, D. (2024). Analysis of the April 2024 Iranian drone and missile salvo: saturation tactics and air defense cost exchange ratios. Jane’s Defence Weekly, 61(18), 14–21
2024
-
[4]
Shi, X., Yang, C., Xie, W., Liang, C., Shi, Z., and Chen, J. (2018). Anti-drone system with multiple surveillance technologies: Architecture, implementation, and challenges. IEEE Communications Magazine, 56(1), 68–74
2018
-
[5]
Liang, J., Ahmad, B.I., Jahangir, M., and Godsill, S. (2021). Detection of malicious intent in non-cooperative drone surveillance. Proc. 2021 SSPD, pp. 1–5
2021
-
[6]
Rao, B., Gopi, A.G., and Maione, R. (2023). The societal impact of commercial drones and counter-drone technologies. Technology in Society, 45, 83–90
2023
-
[7]
Alam, S.S., Chakma, A., Rahman, M.H., et al. (2023). RF-Enabled Deep-Learning-Assisted Drone Detection and Identification: An End-to-End Approach. Sensors, 23(9), 4202
2023
-
[8]
Huynh-The, T., et al. (2022). RF-UAVNet: High-Performance Convolutional Network for RF-Based Drone Surveillance Systems. IEEE Access, 10, 49696–49707
2022
-
[9]
Mo, Y., Huang, J., and Qian, G. (2022). Deep Learning Approach to UAV Detection and Classification by Using Compressively Sensed RF Signal. Sensors, 22(8), 3072
2022
-
[10]
Zhang, Y., et al. (2024). Radio Frequency Signal-Based Drone Classification with Frequency Domain Gramian Angular Field and CNN. Drones, 8(9), 511
2024
-
[11]
Sun, Y., Li, J., Wang, L., et al. (2024). Deep Learning-based drone acoustic event detection for microphone arrays. Multimedia Tools and Applications, 83, 47865–47887
2024
-
[12]
Najafi, J., Mirzakuchaki, S., and Shamaghdari, S. (2024). Autonomous Drone Detection and Classification Using Computer Vision and Prony Algorithm-Based Frequency Feature Extraction. Aerospace Science and Technology
2024
-
[13]
Tejera-Berengue, D., et al. (2023). Acoustic-based detection of UAVs using machine learning: Analysis of distance and environmental effects. IEEE SAS 2023, pp. 1–6
2023
-
[14]
Berg, A.P. (2024). The Sound of Surveillance: Enhancing Machine Learning-Driven Drone Detection with Advanced Acoustic Augmentation. ResearchGate Preprint
2024
- [15]
-
[16]
Bai, J., et al. (2024). Lightweight Object Detection Algorithm of UAV Aerial Image Based on Improved YOLOv8. Proc. EITCE 2024
2024
-
[17]
Zhao, Y., et al. (2024). Lightweight UAV Small Target Detection Based on Improved YOLOv8-E. Drones, 8(11), 681
2024
- [18]
-
[19]
Frid, A., Ben-Shimol, Y., Manor, E., and Greenberg, S. (2024). Drones detection using a fusion of RF and acoustic features and deep neural networks. Sensors, 24(8)
2024
- [20]
-
[21]
Lee, H., et al. (2023). CNN-Based UAV Detection and Classification Using Sensor Fusion. IEEE Access, 11, 68791–68808
2023
-
[22]
Perrusquía, A., Guo, W., Fraser, B., and Wei, Z. (2024). Uncovering drone intentions using control physics informed machine learning. Communications Engineering, 3, 27
2024
- [23]
-
[24]
Kipf, T.N., Fetaya, E., Wang, K.C., Welling, M., and Zemel, R. (2018). Neural Relational Inference for Interacting Systems. ICML 2018. arXiv:1802.04687. — 20 — DroneShield-AI — Bayizere (2026) — arXiv Preprint M. Bayizere
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[25]
Chen, Z., et al. (2024). Graph-based multi-agent reinforcement learning for large-scale UAV swarm system control. Chinese Journal of Aeronautics, 37(6)
2024
- [26]
-
[27]
Ezuma, M., Erden, F., Anjinappa, C., Ozdemir, O., and Guvenc, I. (2020). Drone Remote Controller RF Signal Dataset. IEEE DataPort. DOI: 10.21227/ss99-8d56
-
[28]
Real-time and Historical ADS-B Data
OpenSky Network (2024). Real-time and Historical ADS-B Data. https://opensky-network.org. Accessed May 2026
2024
-
[29]
Allahham, M.S., et al. (2020). Deep learning for RF-based drone detection and identification: A multi-channel 1D CNN approach. IEEE ICIoT 2020, pp. 11–16
2020
-
[30]
Wang, Y., Chu, Z., et al. (2022). A large-scale UAV audio dataset and audio-based UAV classification. IEEE IRC 2022, pp. 186–189
2022
-
[31]
Zhu, P., et al. (2021). Detection and Tracking Meet Drones Challenge. IEEE TPAMI, 44(11), 7380–7399
2021
-
[32]
Zhao, J., et al. (2022). Vision-Based Anti-UAV Detection and Tracking. IEEE TITS, 23(12), 25209–25220
2022
-
[33]
Veličković, P., et al. (2018). Graph Attention Networks. ICLR 2018
2018
-
[34]
Vaswani, A., et al. (2017). Attention Is All You Need. NeurIPS 30
2017
-
[35]
and Schmidhuber, J
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-Term Memory. Neural Computation, 9(8), 1735–1780
1997
-
[36]
Rwanda UAS Regulations and Drone Traffic Management Framework
Rwanda Civil Aviation Authority (RCAA) (2023). Rwanda UAS Regulations and Drone Traffic Management Framework. Government of Rwanda
2023
-
[37]
and Bengio, Y
Nadeau, C. and Bengio, Y. (2003). Inference for the generalization error. Machine Learning, 52(3), 239–281
2003
-
[38]
Rudenko, A., et al. (2020). Human motion trajectory prediction: A survey. IJRR, 39(8), 895–935. — 21 — DroneShield-AI — Bayizere (2026) — arXiv Preprint M. Bayizere APPENDIX A. MATHEMATICAL NOTATION SUMMARY Symbol Definition R, A, V ∈ [0,1] RF, Acoustic, Visual module confidence scores T ∈ [0,1] Fused threat score from Layer 4 fusion engine α, β, γ, δ Fus...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.