Deformable In-Hand Slip-Aware Tactile Sensor with Integrated Velocity, Force/Torque, and Pressure Map Sensing
Pith reviewed 2026-06-27 09:37 UTC · model grok-4.3
The pith
A single deformable tactile sensor integrates velocity, force/torque, and pressure map sensing for slip-aware in-hand manipulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a novel tactile sensor with a deformable contact pad can combine velocity, force/torque, and pressure map sensing inside one compliant structure. This enables slip-aware control during in-hand manipulation. The sensor robustly tracks flat and curved surfaces across a wide range of materials. Its performance is assessed in a set of experiments that reveal both capabilities and limitations. The device is fabricated rapidly and at low cost using standard PCB manufacturing and rapid prototyping techniques.
What carries the argument
The deformable contact surface that houses the integrated velocity, force/torque, and pressure map sensing modalities in a single compliant structure.
If this is right
- The sensor supports slip-aware control in robotic in-hand manipulation by delivering combined sensory data.
- It can track both flat and curved surfaces across a wide range of materials.
- Performance across modalities is demonstrated through a comprehensive set of experiments that also identify limitations.
- The design allows rapid low-cost fabrication using PCB manufacturing and rapid prototyping.
Where Pith is reading between the lines
- A unified sensor of this type could lower the hardware complexity of robotic grippers that currently require separate devices for each modality.
- The approach may extend to other contact-rich tasks where simultaneous multi-modal feedback is needed without rigid sensor stacks.
- Scaling the deformable structure could support applications in variable-friction environments not tested in the reported experiments.
Load-bearing premise
The integrated design maintains accurate performance across all three sensing modalities simultaneously while remaining robust on flat and curved surfaces of varying materials.
What would settle it
An experiment showing loss of accuracy in velocity or force/torque readings when pressure mapping is active on a curved surface of soft material.
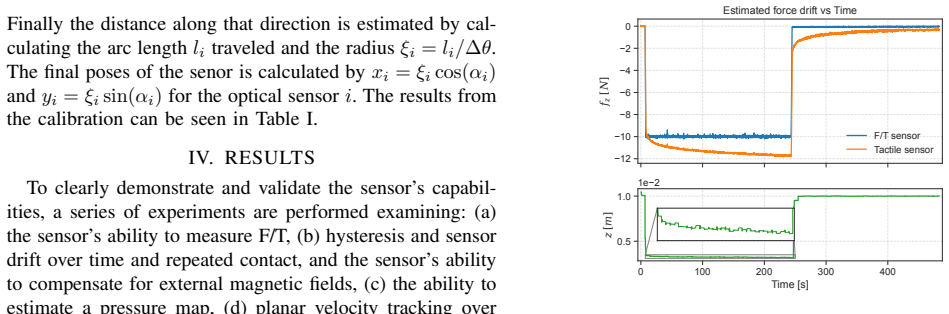
Figures

read the original abstract
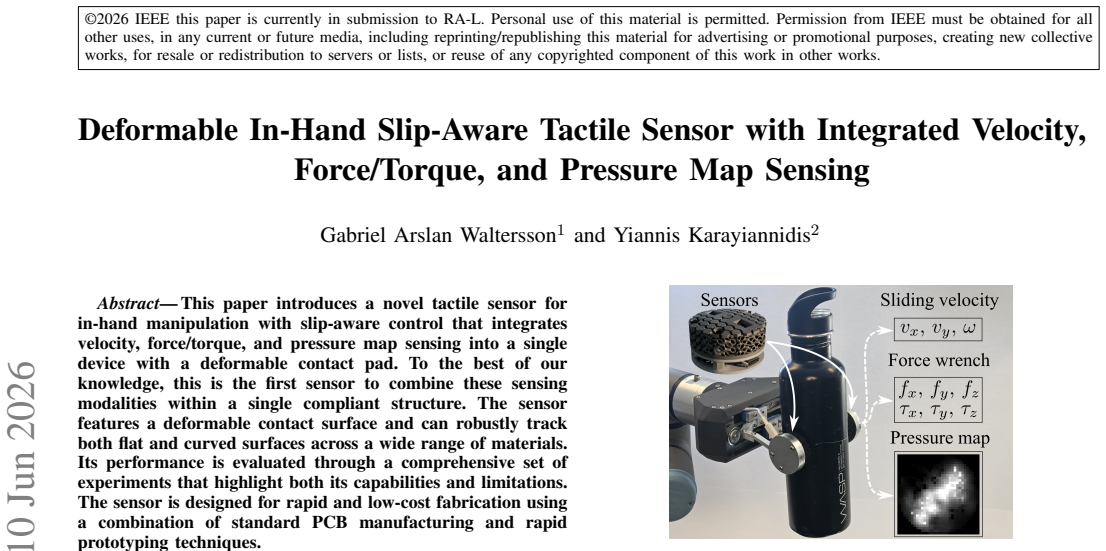
This paper introduces a novel tactile sensor for in-hand manipulation with slip-aware control that integrates velocity, force/torque, and pressure map sensing into a single device with a deformable contact pad. To the best of our knowledge, this is the first sensor to combine these sensing modalities within a single compliant structure. The sensor features a deformable contact surface and can robustly track both flat and curved surfaces across a wide range of materials. Its performance is evaluated through a comprehensive set of experiments that highlight both its capabilities and limitations. The sensor is designed for rapid and low-cost fabrication using a combination of standard PCB manufacturing and rapid prototyping techniques.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a novel tactile sensor for in-hand manipulation with slip-aware control that integrates velocity, force/torque, and pressure map sensing into a single device with a deformable contact pad. It claims to be the first such sensor, fabricated via standard PCB manufacturing and rapid prototyping, and evaluates performance through a comprehensive experimental suite on flat and curved surfaces of varying materials while noting limitations.
Significance. If the experiments confirm simultaneous multi-modal sensing without unacceptable cross-talk or accuracy loss, the work advances tactile sensing for robotics by enabling compact, compliant multi-modal feedback in a single structure. The low-cost fabrication approach supports reproducibility.
minor comments (2)
- [Abstract] Abstract: the claim of 'comprehensive set of experiments' would be strengthened by briefly noting key quantitative metrics (e.g., velocity error, force RMSE, or cross-talk levels) rather than leaving them implicit.
- [Introduction] The literature review should explicitly compare the sensor's simultaneous three-modality performance against prior multi-modal tactile designs to substantiate the 'first' claim beyond the abstract statement.
Simulated Author's Rebuttal
We thank the referee for their positive summary of our manuscript and the recommendation of minor revision. The referee's assessment correctly identifies the sensor's integrated multi-modal capabilities and low-cost fabrication approach. No specific major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The paper is a hardware design and experimental evaluation of a tactile sensor. No mathematical derivations, equations, fitted parameters, or load-bearing self-citations are present in the provided text. The central claim (first integration of velocity/force-torque/pressure-map sensing in one compliant structure) is presented as an engineering contribution validated by experiments, not derived from prior results or definitions within the paper itself. This is the expected outcome for a non-theoretical sensor paper with no derivation chain to inspect.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Planar friction modeling with lugre dynamics and limit surfaces,
G. A. Waltersson and Y . Karayiannidis, “Planar friction modeling with lugre dynamics and limit surfaces,”IEEE Transactions on Robotics, vol. 40, pp. 3166–3180, 2024
2024
-
[2]
Polymer-based flexible capacitive sen- sor for three-axial force measurements,
J. A. Dobrzynska and M. Gijs, “Polymer-based flexible capacitive sen- sor for three-axial force measurements,”Journal of Micromechanics and Microengineering, vol. 23, no. 1, p. 015009, 2012
2012
-
[3]
Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammerer,et al., “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845, 2020
2020
-
[4]
Recent progress in technologies for tactile sensors,
C. Chi, X. Sun, N. Xue, T. Li, and C. Liu, “Recent progress in technologies for tactile sensors,”Sensors, vol. 18, no. 4, 2018. [Online]. Available: https://www.mdpi.com/1424-8220/18/4/948
2018
-
[5]
Fiber optic sensors in tactile sensing: A review,
C. Lyu, P. Li, J. Zhang, and Y . Du, “Fiber optic sensors in tactile sensing: A review,”IEEE Transactions on Instrumentation and Mea- surement, vol. 74, pp. 1–16, 2025
2025
-
[6]
Tactile sensors for friction estimation and incipient slip detection—toward dexterous robotic manipulation: A review,
W. Chen, H. Khamis, I. Birznieks, N. F. Lepora, and S. J. Red- mond, “Tactile sensors for friction estimation and incipient slip detection—toward dexterous robotic manipulation: A review,”IEEE Sensors Journal, vol. 18, no. 22, pp. 9049–9064, 2018
2018
-
[7]
Tactile sens- ing—from humans to humanoids,
R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sens- ing—from humans to humanoids,”IEEE Transactions on Robotics, vol. 26, no. 1, pp. 1–20, 2010
2010
-
[8]
Tactile sensing for dexterous in-hand manipulation in robotics—a review,
H. Yousef, M. Boukallel, and K. Althoefer, “Tactile sensing for dexterous in-hand manipulation in robotics—a review,”Sensors and Actuators A: Physical, vol. 167, no. 2, pp. 171–187, 2011, solid-State Sensors, Actuators and Microsystems Workshop
2011
-
[9]
Tactile sensing in dexterous robot hands — review,
Z. Kappassov, J.-A. Corrales, and V . Perdereau, “Tactile sensing in dexterous robot hands — review,”Robotics and Autonomous Systems, vol. 74, pp. 195–220, 2015
2015
-
[10]
eflesh: Highly customizable magnetic touch sensing using cut-cell microstructures,
V . Pattabiraman, Z. Huang, D. Panozzo, D. Zorin, L. Pinto, and R. Bhirangi, “eflesh: Highly customizable magnetic touch sensing using cut-cell microstructures,” 2025. [Online]. Available: https://arxiv.org/abs/2506.09994
-
[11]
Tactile sensor elements based on commercial components: An experimental comparison,
S. Groß, L. Chen, E. Pozo Fortuni ´c, M. Krummschmidt, J. Ringwald, A. Ganguly, and S. Haddadin, “Tactile sensor elements based on commercial components: An experimental comparison,”IEEE Sensors Journal, vol. 25, no. 20, pp. 37 802–37 809, 2025
2025
-
[12]
Detecting and controlling slip through estimation and control of the sliding velocity,
M. Costanzo, G. De Maria, and C. Natale, “Detecting and controlling slip through estimation and control of the sliding velocity,”Applied Sciences, vol. 13, no. 2, 2023
2023
-
[13]
Fast in-hand slip control on unfeatured objects with programmable tactile sensing,
Y . Gloumakov, T. M. Huh, and H. S. Stuart, “Fast in-hand slip control on unfeatured objects with programmable tactile sensing,” IEEE Robotics and Automation Letters, vol. 9, no. 7, pp. 6059–6066, 2024
2024
-
[14]
Tactile velocity estima- tion for controlled in-grasp sliding,
Y . Chen, C. Prepscius, D. Lee, and D. D. Lee, “Tactile velocity estima- tion for controlled in-grasp sliding,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1614–1621, 2021
2021
-
[15]
Dynamically reconfigurable tactile sensor for robotic manipulation,
T. M. Huh, H. Choi, S. Willcox, S. Moon, and M. R. Cutkosky, “Dynamically reconfigurable tactile sensor for robotic manipulation,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2562–2569, 2020
2020
-
[16]
Adaptive control for pivoting with visual and tactile feedback,
F. E. Vi ˜na B., Y . Karayiannidis, C. Smith, and D. Kragic, “Adaptive control for pivoting with visual and tactile feedback,” in2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 399–406
2016
-
[17]
Towards robust grasping: An analysis of in-hand object motion with fbg optical fibers as force sensing technology,
P. Tripicchio, S. D’Avella, C. A. Avizzano, and P. Velha, “Towards robust grasping: An analysis of in-hand object motion with fbg optical fibers as force sensing technology,”Mechatronics, vol. 93, p. 102990, 2023
2023
-
[18]
Sliding sensor using fiber bragg grating for mechanical fingers,
M. Qian, Y . Yu, N. Ren, J. Wang, and X. Jin, “Sliding sensor using fiber bragg grating for mechanical fingers,”Opt. Express, vol. 26, no. 1, pp. 254–264, Jan 2018
2018
-
[19]
Design and experimental research of robot finger sliding tactile sensor based on fbg,
G. Lu, S. Fu, and Y . Xu, “Design and experimental research of robot finger sliding tactile sensor based on fbg,”Sensors, vol. 22, no. 21, 2022
2022
-
[20]
Artificial tactile sensing of position and slip speed by exploiting geometrical features,
D. D. Damian, T. H. Newton, R. Pfeifer, and A. M. Okamura, “Artificial tactile sensing of position and slip speed by exploiting geometrical features,”IEEE/ASME Transactions on Mechatronics, vol. 20, no. 1, pp. 263–274, 2015
2015
-
[21]
Perception, control, and hardware for in-hand slip-aware object manipulation with parallel grippers,
G. A. Waltersson and Y . Karayiannidis, “Perception, control, and hardware for in-hand slip-aware object manipulation with parallel grippers,”The International Journal of Robotics Research, vol. 0, no. 0, p. 02783649251397549, 0
-
[22]
Improving robot manipu- lation through fingertip perception,
A. Maldonado, H. Alvarez, and M. Beetz, “Improving robot manipu- lation through fingertip perception,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012, pp. 2947–2954
2012
-
[23]
Measuring and incorporating slip in data- driven haptic rendering,
R. H ¨over and M. Harders, “Measuring and incorporating slip in data- driven haptic rendering,” in2010 IEEE Haptics Symposium, 2010, pp. 175–182
2010
-
[24]
Characterizing the performance of an optical slip sensor for grip control in a prosthesis,
H. N. Sani and S. G. Meek, “Characterizing the performance of an optical slip sensor for grip control in a prosthesis,” in2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011, pp. 1927–1932
2011
-
[25]
An Overview of Multi-Task Learning in Deep Neural Networks
S. Ruder, “An overview of multi-task learning in deep neural net- works,”arXiv preprint arXiv:1706.05098, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[26]
Design and evaluation of magnetic hall effect tactile sensors for use in sensorized splints,
D. Jones, L. Wang, A. Ghanbari, V . Vardakastani, A. E. Kedgley, M. D. Gardiner, T. L. Vincent, P. R. Culmer, and A. Alazmani, “Design and evaluation of magnetic hall effect tactile sensors for use in sensorized splints,”Sensors, vol. 20, no. 4, 2020
2020
-
[27]
A wearable three-axis tactile sensor for human fingertips,
H. Kristanto, P. Sathe, A. Schmitz, T. P. Tomo, S. Somlor, and S. Sugano, “A wearable three-axis tactile sensor for human fingertips,” IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 4313–4320, 2018
2018
-
[28]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.