Geometric Consistency Protocol for Foundation Model Features in Multi-View Satellite Imagery
Pith reviewed 2026-06-27 01:24 UTC · model grok-4.3
The pith
Geometric constraints are fundamental to evaluating foundation model features in multi-view satellite imagery under RPC geometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
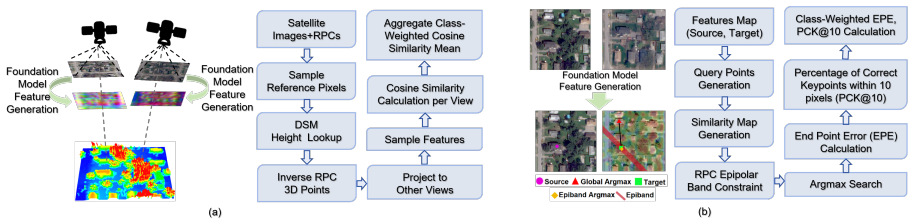
We propose a geometry-faithful and reproducible protocol tailored for the RPC framework that integrates an RPC-projected 3D consistency metric with a geometry-constrained dense matching proxy. This evaluates whether similarity responses remain localized and unique under physically plausible search manifolds. A key finding is the decoupling of semantic agreement and geometric localization, where high cross-view similarity at a projected 3D point does not guarantee reliable matchability in practical inference. The benchmark shows that incorporating geometric constraints is fundamental to the problem definition in satellite imagery and that state-of-the-art 2D backbones remain competitive again
What carries the argument
RPC-projected 3D consistency metric with geometry-constrained dense matching proxy that enforces evaluation on physically plausible search manifolds dictated by the Rational Function Model.
If this is right
- Geometric constraints must be incorporated into problem definitions for satellite feature matching.
- High similarity scores alone are insufficient to predict reliable matchability.
- State-of-the-art 2D backbones can match the performance of 3D-aware models when evaluated consistently with RPC geometry.
- Conventional unconstrained 2D evaluations are physically inconsistent with satellite imaging geometries.
Where Pith is reading between the lines
- Future benchmarks in remote sensing should adopt similar geometry-aware protocols to avoid overestimating model capabilities.
- The decoupling finding suggests that training objectives for foundation models in this domain may need to explicitly optimize for geometric localization in addition to semantic features.
- Similar issues with non-flat epipolar geometry could arise in other multi-view settings with complex camera models.
Load-bearing premise
The assumption that the RPC-projected 3D consistency metric combined with the geometry-constrained dense matching proxy provides a valid and unbiased measure of practical matchability in satellite imagery.
What would settle it
An experiment showing that models passing the geometric consistency test do not produce more accurate multi-view reconstructions than those failing it, or vice versa.
Figures
read the original abstract
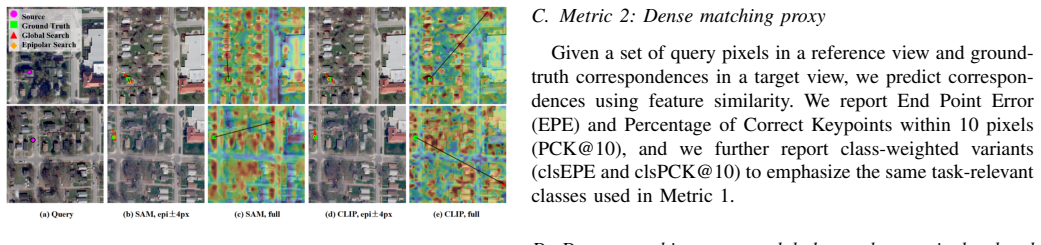
Standardized evaluation protocols are indispensable for robust benchmarking in remote sensing, particularly as foundation features are increasingly transferred across diverse sensors and complex imaging geometries. In satellite multi-view reconstruction, conventional evaluations relying on unconstrained 2D global matching are often misleading. The Rational Function Model (RFM) and its Rational Polynomial Coefficients (RPC) dictate a curved, height-dependent epipolar geometry that render flat 2D search spaces physically inconsistent. We propose a geometry-faithful and reproducible protocol tailored for the RPC framework. Our approach integrates an RPC-projected 3D consistency metric with a geometry-constrained dense matching proxy, specifically evaluating whether similarity responses remain localized and unique under physically plausible search manifolds. A pivotal finding of our joint reporting strategy is the decoupling of semantic agreement and geometric localization: high cross-view similarity at a projected 3D point does not guarantee reliable matchability in practical inference. Our benchmark demonstrates that incorporating geometric constraints is fundamental to the problem definition in satellite imagery. Furthermore, we show that state-of-the-art 2D backbones remain remarkably competitive against specialized 3D-aware models when subjected to this RPC-consistent evaluation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that conventional unconstrained 2D global matching evaluations are misleading for foundation model features in multi-view satellite imagery because the Rational Function Model (RFM) and Rational Polynomial Coefficients (RPC) impose a curved, height-dependent epipolar geometry. It proposes a new reproducible protocol that combines an RPC-projected 3D consistency metric with a geometry-constrained dense matching proxy to evaluate whether similarity responses remain localized and unique under physically plausible search manifolds. The central results are a decoupling between semantic agreement (high cross-view similarity at projected 3D points) and geometric localization (reliable matchability), the necessity of geometric constraints for the problem definition, and the competitiveness of state-of-the-art 2D backbones versus specialized 3D-aware models under this RPC-consistent evaluation.
Significance. If the protocol is shown to be unbiased and predictive of practical multi-view stereo performance, the work would provide a needed standardized benchmark for transferring foundation features across satellite sensors and geometries, clarifying when geometric consistency must be enforced rather than assumed from 2D similarity alone.
major comments (2)
- [Evaluation protocol and benchmark results] The central claims (decoupling of semantic agreement from geometric localization; 2D backbones remain competitive) rest entirely on benchmark results from the new protocol. The manuscript provides no validation of the RPC-projected 3D consistency metric or geometry-constrained dense matching proxy against independent ground-truth correspondences or against end-to-end multi-view stereo accuracy, leaving open the possibility that observed differences are artifacts of the chosen manifold or similarity aggregation (see abstract and the description of the joint reporting strategy).
- [Geometry-constrained dense matching proxy] The assumption that the geometry-constrained dense matching proxy correctly identifies physically plausible search manifolds under height-dependent RPC epipolar geometry is load-bearing for the claim that geometric constraints are 'fundamental to the problem definition.' No section demonstrates that the proxy does not introduce its own selection bias relative to real-world matchability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The comments correctly identify that our central claims depend on the internal consistency of the proposed RPC-consistent protocol. Below we address each major comment directly, clarifying the scope of the contribution while acknowledging where additional evidence can be provided.
read point-by-point responses
-
Referee: [Evaluation protocol and benchmark results] The central claims (decoupling of semantic agreement from geometric localization; 2D backbones remain competitive) rest entirely on benchmark results from the new protocol. The manuscript provides no validation of the RPC-projected 3D consistency metric or geometry-constrained dense matching proxy against independent ground-truth correspondences or against end-to-end multi-view stereo accuracy, leaving open the possibility that observed differences are artifacts of the chosen manifold or similarity aggregation.
Authors: The protocol's primary purpose is to enforce a physically consistent search manifold under the RPC model rather than to serve as a direct proxy for end-to-end MVS accuracy. The reported decoupling is an internal observation obtained by comparing similarity responses inside versus outside the RPC-projected manifold on the same feature extractors; this comparison does not rely on external GT. Nevertheless, we agree that demonstrating correlation with independent correspondences (e.g., from bundle-adjusted tie points or LiDAR) would increase confidence that the metric is not an artifact. We will add a validation subsection that reports agreement between the RPC-projected consistency scores and a small set of manually verified correspondences on one of the evaluation scenes. revision: yes
-
Referee: [Geometry-constrained dense matching proxy] The assumption that the geometry-constrained dense matching proxy correctly identifies physically plausible search manifolds under height-dependent RPC epipolar geometry is load-bearing for the claim that geometric constraints are 'fundamental to the problem definition.' No section demonstrates that the proxy does not introduce its own selection bias relative to real-world matchability.
Authors: The proxy constructs the search manifold by sampling the RPC along the height range consistent with the scene's digital elevation model bounds; this construction follows directly from the RFM definition and does not rely on learned components. To mitigate concerns about selection bias, we will include an ablation that varies the height sampling density and reports the resulting change in matchability statistics. We will also add a qualitative comparison showing that the constrained manifolds align with the curved epipolar lines observed in real satellite pairs. revision: yes
Circularity Check
No significant circularity; protocol is self-contained against external RFM/RPC model
full rationale
The paper defines a new evaluation protocol by integrating the established Rational Function Model (RFM) and Rational Polynomial Coefficients (RPC) with an RPC-projected 3D consistency metric and geometry-constrained dense matching proxy. These components are constructed from standard satellite geometry rather than fitted to the target benchmark outcomes or defined in terms of the semantic agreement they later measure. No equations reduce a claimed prediction to its own inputs by construction, no self-citation chains justify load-bearing uniqueness theorems, and no ansatz is smuggled via prior author work. The benchmark results are presented as empirical observations under the new protocol, not as forced outputs of the protocol definition itself. The derivation therefore remains independent of the specific feature comparisons reported.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A general deep learning based framework for 3d reconstruction from multi-view stereo satel- lite images,
J. Gao, J. Liu, and S. Ji, “A general deep learning based framework for 3d reconstruction from multi-view stereo satel- lite images,”ISPRS Journal of Photogrammetry and Remote Sensing, vol. 195, pp. 446–461, 2023
2023
-
[2]
Mvsr3d: An end-to-end framework for semantic 3-d reconstruction using multiview satellite imagery,
X. Huang, X. Liu, Y . Wan, Z. Zheng, B. Zhang, Y . Wang, H. Guo, and Y . Zhang, “Mvsr3d: An end-to-end framework for semantic 3-d reconstruction using multiview satellite imagery,” IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–14, 2025
2025
-
[3]
DINOv2: Learning robust visual features without supervision,
M. Oquab, T. Darcet, T. Moutakanni, H. V . V o, M. Szafraniec, V . Khalidov, P. Fernandez, D. HAZIZA, F. Massa, A. El-Nouby, M. Assran, N. Ballas, W. Galuba, R. Howes, P.-Y . Huang, S.- W. Li, I. Misra, M. Rabbat, V . Sharma, G. Synnaeve, H. Xu, H. Jegou, J. Mairal, P. Labatut, A. Joulin, and P. Bojanowski, “DINOv2: Learning robust visual features without...
2024
-
[4]
Learning transferable visual models from natural language supervision,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agar- wal, G. Sastry, A. Askell, P. Mishkin, J. Clark, G. Krueger, and I. Sutskever, “Learning transferable visual models from natural language supervision,” inProceedings of the 38th International Conference on Machine Learning, ser. Proceedings of Machine Learning Research, M. Meila and T. Zhang, ...
2021
-
[5]
Segment anything,
A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead, A. C. Berg, W.-Y . Lo, P. Dollar, and R. Girshick, “Segment anything,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), October 2023, pp. 4015–4026
2023
-
[6]
L. Segre, O. Hirschorn, and S. Avidan, “Multi-view foundation models,”arXiv preprint arXiv:2512.15708, 2025
-
[7]
Improving 2D Feature Representations by 3D-Aware Fine- Tuning,
Y . Yue, A. Das, F. Engelmann, S. Tang, and J. E. Lenssen, “Improving 2D Feature Representations by 3D-Aware Fine- Tuning,” inEuropean Conference on Computer Vision (ECCV), 2024, pp. 57–74
2024
-
[8]
Nerf: representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ra- mamoorthi, and R. Ng, “Nerf: representing scenes as neural radiance fields for view synthesis,”Commun. ACM, vol. 65, no. 1, p. 99–106, Dec. 2021
2021
-
[9]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Transactions on Graphics, vol. 42, no. 4, July 2023
2023
-
[10]
Plenoxels: Radiance Fields without Neural Networks,
S. Fridovich-Keil, A. Yu, M. Tancik, Q. Chen, B. Recht, and A. Kanazawa, “Plenoxels: Radiance Fields without Neural Networks,” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, pp. 5491–5500
-
[11]
DFA3D: 3D Deformable Attention For 2D-to-3D Feature Lift- ing,
H. Li, H. Zhang, Z. Zeng, S. Liu, F. Li, T. Ren, and L. Zhang, “DFA3D: 3D Deformable Attention For 2D-to-3D Feature Lift- ing,” in2023 IEEE/CVF International Conference on Computer Vision (ICCV). IEEE, pp. 6661–6670
-
[12]
Lift3d: Zero-shot lifting of any 2d vision model to 3d,
M. Varma T, P. Wang, Z. Fan, Z. Wang, H. Su, and R. Ra- mamoorthi, “Lift3d: Zero-shot lifting of any 2d vision model to 3d,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2024, pp. 21 367– 21 377
2024
-
[13]
An evaluation of dust3r/mast3r/vggt 3d reconstruction on photogrammetric aerial blocks,
X. Wu, S. Landgraf, M. Ulrich, and R. Qin, “An evaluation of dust3r/mast3r/vggt 3d reconstruction on photogrammetric aerial blocks,”Geo-spatial Information Science, vol. 0, no. 0, pp. 1– 19, 2025
2025
-
[14]
Towards efficient benchmarking of foundation models in remote sens- ing: A capabilities encoding approach,
P. Adorni, M.-T. Pham, S. May, and S. Lef `evre, “Towards efficient benchmarking of foundation models in remote sens- ing: A capabilities encoding approach,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR) Workshops, June 2025, pp. 3121–3131
2025
-
[15]
Choice: Benchmarking the remote sensing capabilities of large vision-language models,
X. An, J. Sun, Z. Gui, and W. He, “Choice: Benchmarking the remote sensing capabilities of large vision-language models,” arXiv preprint arXiv:2411.18145, 2024
-
[16]
Comparative analysis of advanced feature matching algorithms in challeng- ing high spatial resolution optical satellite stereo scenarios,
Q. Luo, J. Zhang, Y . Xie, X. Huang, and T. Han, “Comparative analysis of advanced feature matching algorithms in challeng- ing high spatial resolution optical satellite stereo scenarios,” inIGARSS 2024 - 2024 IEEE International Geoscience and Remote Sensing Symposium, 2024, pp. 2645–2649
2024
-
[17]
Hsross: A benchmark for feature matching algorithms of high-resolution optical satel- lites in challenging scenarios,
Q. Luo, J. Zhang, M. Wang, and Z. Fan, “Hsross: A benchmark for feature matching algorithms of high-resolution optical satel- lites in challenging scenarios,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 18, pp. 26 108–26 120, 2025
2025
-
[18]
Deep learning in remote sensing image fusion: Methods, protocols, data, and future perspectives,
G. Vivone, L.-J. Deng, S. Deng, D. Hong, M. Jiang, C. Li, W. Li, H. Shen, X. Wu, J.-L. Xiao, J. Yao, M. Zhang, J. Chanussot, S. Garc´ıa, and A. Plaza, “Deep learning in remote sensing image fusion: Methods, protocols, data, and future perspectives,”IEEE Geoscience and Remote Sensing Magazine, vol. 13, no. 1, pp. 269–310, 2025
2025
-
[19]
Deep learning based domain adaptation methods in remote sensing: A comprehensive survey,
S. Lyu, Q. Zhao, Z. Zhou, M. Li, Y . Zhou, D. Yao, G. Cheng, H. Zhou, and Z. Shi, “Deep learning based domain adaptation methods in remote sensing: A comprehensive survey,”arXiv preprint arXiv:2510.15615, 2025
-
[20]
Geocrossbench: Cross-band generalization for remote sensing.arXiv preprint arXiv:2511.02831, 2025
H. Tamazyan, A. Vanyan, A. Barseghyan, A. Khosrovyan, E. Shelhamer, and H. Khachatrian, “Geocrossbench: Cross- band generalization for remote sensing,”arXiv preprint arXiv:2511.02831, 2025
-
[21]
Data fusion contest 2019 (dfc2019),
B. L. Saux, N. Yokoya, R. H ¨ansch, and M. Brown, “Data fusion contest 2019 (dfc2019),” 2019
2019
-
[22]
O. Sim ´eoni, H. V . V o, M. Seitzer, F. Baldassarre, M. Oquab, C. Jose, V . Khalidov, M. Szafraniec, S. Yi, M. Ramamonjisoa et al., “Dinov3,”arXiv preprint arXiv:2508.10104, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.