A physical adaptive material motor unit neural network: a hygromorph composite material machine
Pith reviewed 2026-06-27 19:56 UTC · model grok-4.3
The pith
A physical neural network built from hygromorph composite actuators learns to predict and optimize shading responses through data-aware backpropagation training on experimental data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
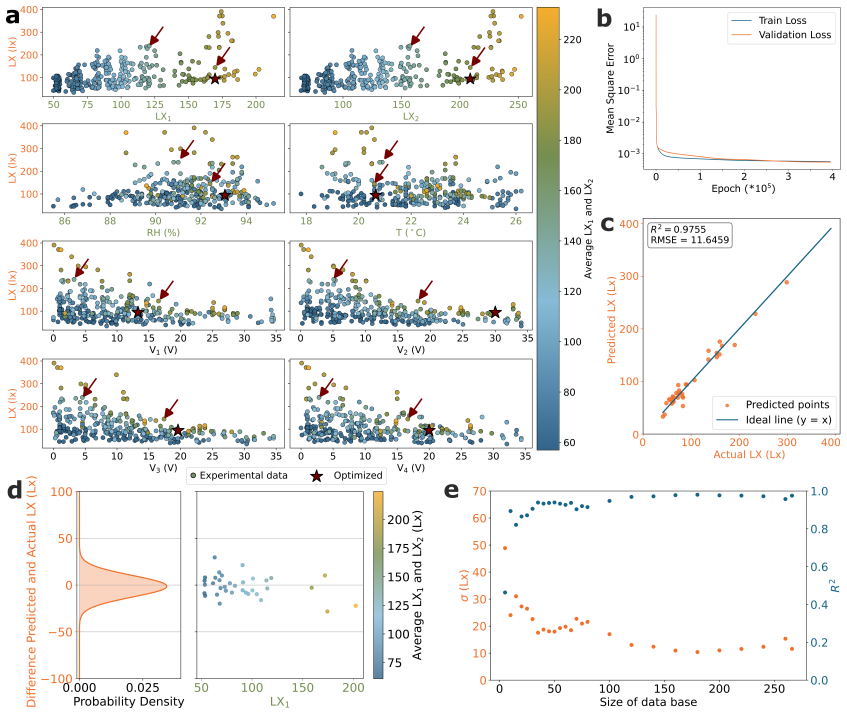
By arranging hygromorph composite actuators into a motor-unit-like structure and training a neural network with data-aware backpropagation on over 350 experimental data points collected under varied temperature and humidity conditions, the resulting physical machine predicts shading responses and optimizes configurations to achieve similar shading outputs under distinct conditions while learning incrementally as the database expands.
What carries the argument
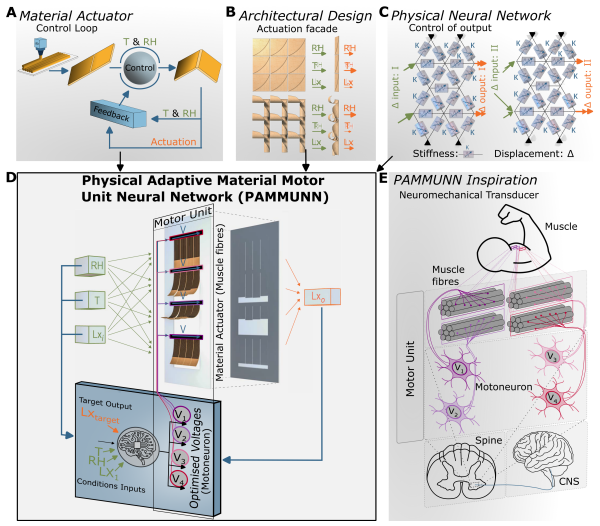
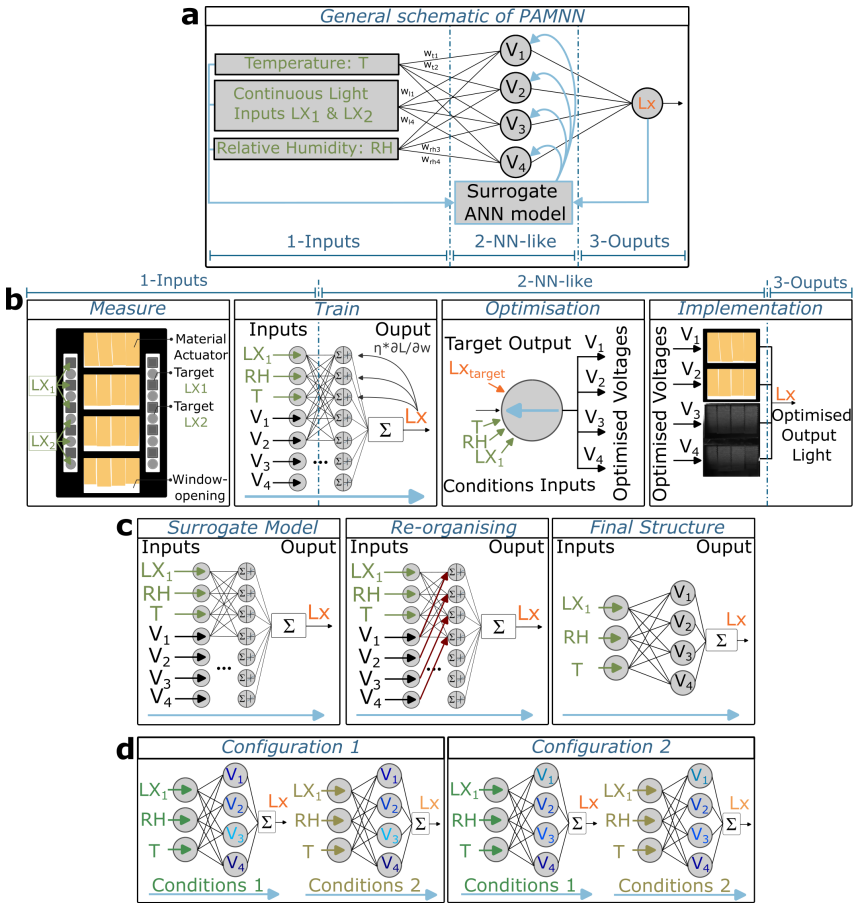
The physical adaptive material motor unit neural network, formed by hygromorph wood-carbon composite actuators combined with a neural network that receives environmental inputs and outputs actuator configurations for shading control.
If this is right
- The machine predicts shading responses from environmental inputs using the trained neural network.
- Predictions improve incrementally as additional experimental data points are added to the training set.
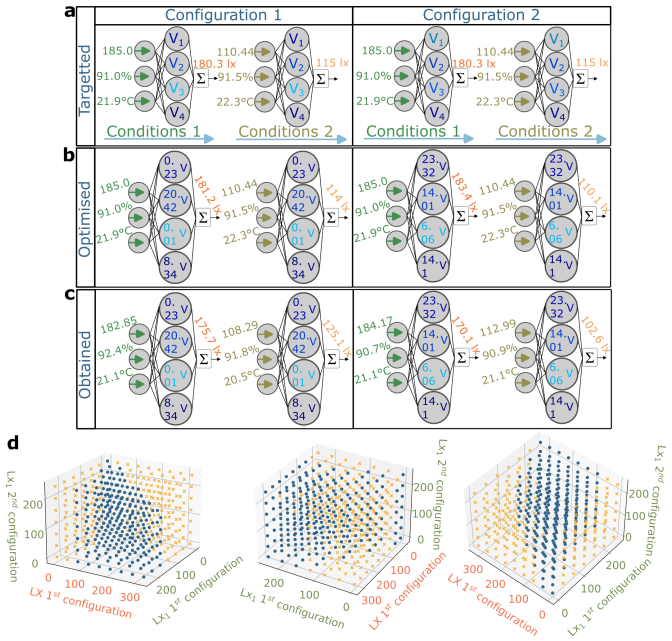
- The network can optimize actuator configurations to produce comparable shading outputs under two different sets of temperature and humidity conditions.
- The approach enables dynamic shading control suitable for building applications by embedding the computation in the responsive material.
Where Pith is reading between the lines
- Structures could adapt their form to weather without separate electronic controllers or power supplies.
- The same material-plus-network method might be extended to respond to other variables such as light intensity or mechanical load.
- Large-scale versions could create self-regulating building envelopes that maintain target performance across seasons.
Load-bearing premise
The hygromorph composite actuators give repeatable and predictable shape changes in response to temperature and relative humidity that can be captured by the neural network.
What would settle it
If repeated tests under the same temperature and humidity conditions produce inconsistent actuator displacements or shading levels, the data-aware training would fail to produce reliable predictions or optimizations.
Figures
read the original abstract
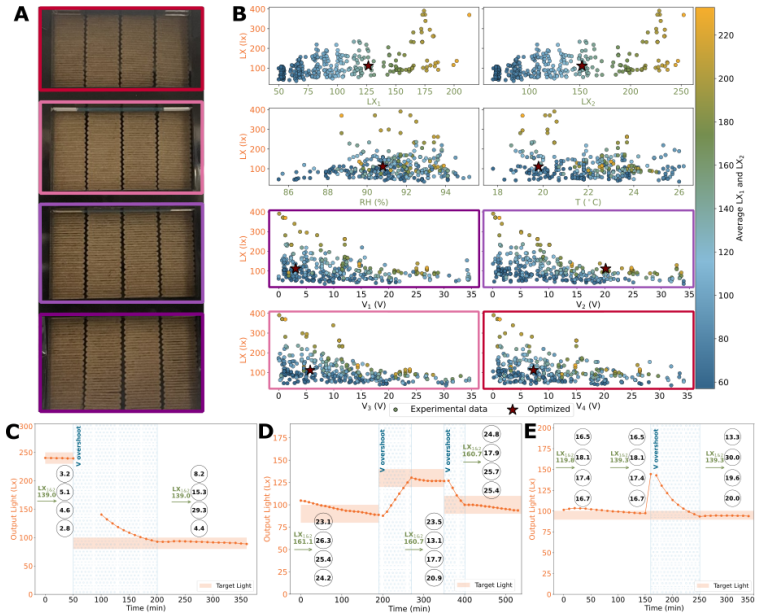
Advances in novel materials science enable structures to function as intelligent machines by embedding memory and learning capabilities directly into materials. Our work introduces a physical adaptive material motor unit neural network,leveraging a new generation of controllable actuators composed of wood- and carbon black-based composites, sensitive to temperature and relative humidity. These material actuators are assembled into a motor unit-like structure inspired by muscle contraction trigger, forming an intelligent machine capable of dynamic shading control that can be used, for example, in buildings. The machine is governed by a neural network trained on over 350 experimental data points collected under diverse environmental conditions. By establishing a new data-aware backpropagation training, we show that the machine predicts shading responses and learns to predict appropriate behaviour incrementally as the database expands. We also demonstrate the ability of the machine to optimise configurations to achieve similar shading outputs under two distinct conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a physical adaptive material motor unit neural network using hygromorph wood-carbon black composite actuators assembled into a muscle-inspired structure for dynamic shading control. The system is governed by a neural network trained via a new data-aware backpropagation method on over 350 experimental data points collected under varying temperature and relative humidity conditions; the authors claim this enables prediction of shading responses, incremental learning as the database expands, and optimization of actuator configurations to achieve similar outputs under two distinct environmental conditions.
Significance. If the central claims are supported by rigorous validation, the work could advance physical computing by embedding trainable neural-network behavior directly into responsive composite materials, with potential applications in adaptive architecture. The integration of experimental actuator data with backpropagation-style training and the demonstration of cross-condition optimization represent a distinctive contribution at the materials-ML interface.
major comments (2)
- [Methods/Results (data collection)] Methods/Results sections on data acquisition: the manuscript reports collection of >350 data points but supplies no statistics (e.g., standard deviation, hysteresis loops, or drift metrics) on intra-cycle or inter-cycle repeatability of the wood-carbon black actuators under repeated T/RH stimuli. This omission is load-bearing for the incremental-learning and optimization claims, because non-stationary or high-variance physical responses would prevent reliable modeling and cross-condition generalization.
- [Training procedure] Training section: the description of 'data-aware backpropagation' does not include the explicit loss function, how physical constraints or measurement uncertainty are incorporated, or a comparison to standard backpropagation. Without these details it is impossible to evaluate whether the method is novel or merely a re-labeling of supervised training on experimental data.
minor comments (1)
- [Abstract] Abstract: the phrase 'a new data-aware backpropagation training' is introduced without a one-sentence definition; a brief clarification would improve readability for a broad audience.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which help clarify the presentation of our experimental methods and training procedure. We address each major comment below and indicate the corresponding revisions.
read point-by-point responses
-
Referee: [Methods/Results (data collection)] Methods/Results sections on data acquisition: the manuscript reports collection of >350 data points but supplies no statistics (e.g., standard deviation, hysteresis loops, or drift metrics) on intra-cycle or inter-cycle repeatability of the wood-carbon black actuators under repeated T/RH stimuli. This omission is load-bearing for the incremental-learning and optimization claims, because non-stationary or high-variance physical responses would prevent reliable modeling and cross-condition generalization.
Authors: We agree that quantitative repeatability metrics are necessary to substantiate the reliability of the physical responses for training and generalization. The revised manuscript will add standard deviations computed over repeated cycles for each actuator, representative hysteresis loops under T/RH cycling, and drift metrics over the full experimental campaign. These additions will directly support the stationarity assumption underlying the incremental-learning and cross-condition optimization results. revision: yes
-
Referee: [Training procedure] Training section: the description of 'data-aware backpropagation' does not include the explicit loss function, how physical constraints or measurement uncertainty are incorporated, or a comparison to standard backpropagation. Without these details it is impossible to evaluate whether the method is novel or merely a re-labeling of supervised training on experimental data.
Authors: We acknowledge that the current description is insufficient for independent evaluation. The revised manuscript will (i) state the explicit loss function (mean-squared error on normalized shading angle with optional regularization), (ii) detail how per-measurement uncertainty (derived from sensor precision and actuator variance) is incorporated via heteroscedastic weighting, and (iii) include a side-by-side comparison table contrasting the data-aware variant against standard backpropagation on the same dataset, thereby clarifying the incremental and constraint-aware aspects. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper trains a neural network via data-aware backpropagation on >350 experimental data points from physical hygromorph actuators. Claims of incremental prediction and cross-condition optimization are standard supervised learning outputs from measured inputs; no equations, self-definitional steps, or load-bearing self-citations reduce any result to its own inputs by construction. The derivation chain is self-contained against external experimental benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Architectural swarms for responsive façades and creative expression
Merihan Alhafnawi, Jad Bendarkawi, Yenet Tafesse, Lucia Stein-Montalvo, Azariah Jones, Vicky Chow, Sigrid Adriaenssens, and Radhika Nagpal. Architectural swarms for responsive façades and creative expression. Sci. Robot., 11(110):7233, 1 2026
2026
-
[2]
Aubin, Benjamin Gorissen, Edoardo Milana, Philip R
Cameron A. Aubin, Benjamin Gorissen, Edoardo Milana, Philip R. Buskohl, Nathan Lazarus, Geoffrey A. Slipher, Christoph Keplinger, Josh Bongard, Fumiya Iida, Jennifer A. Lewis, and Robert F. Shepherd. Towards enduring autonomous robots via embodied energy. Nat., 602(7897):393–402, 2 2022
2022
-
[3]
Designing Adaptive Shading Components for 4D Printing
Caterina Battaglia, Renata Morbiducci, and Frédéric Demoly. Designing Adaptive Shading Components for 4D Printing. In Envisioning the Futures - Designing and Building for People and the Environment , pages 63–84. Springer, Cham, 10 2025
2025
-
[4]
4D Printing of Shape Memory Materials for Textiles: Mechanism, Mathematical Modeling, and Challenges
Manik Chandra Biswas, Samit Chakraborty, Abhishek Bhattacharjee, and Zaheeruddin Mo- hammed. 4D Printing of Shape Memory Materials for Textiles: Mechanism, Mathematical Modeling, and Challenges. Adv. Funct. Mater. , 31(19), 5 2021
2021
-
[5]
Cyclic hygrothermal ageing of flax fibers’ bundles and unidirectional flax/epoxy composite
Thomas Cadu, Laetitia Van Schoors, Olivier Sicot, Sandrine Moscardelli, Loïc Divet, and Stéphane Fontaine. Cyclic hygrothermal ageing of flax fibers’ bundles and unidirectional flax/epoxy composite. Are bio-based reinforced composites so sensitive? Ind. Crop. Prod. , 141:111730, 12 2019. 22
2019
-
[6]
Weather-responsive adaptive shading through biobased and bioinspired hygromorphic 4D-printing
Tiffany Cheng, Yasaman Tahouni, Ekin Sila Sahin, Kim Ulrich, Silvia Lajewski, Christian Bonten, Dylan Wood, Jürgen Rühe, Thomas Speck, and Achim Menges. Weather-responsive adaptive shading through biobased and bioinspired hygromorphic 4D-printing. Nat. Commun. , 15(1):1–13, 11 2024
2024
-
[7]
Gracego, Martin L
Christopher Chung, Huan Jiang, Alston X. Gracego, Martin L. Dunn, and Kai Yu. Robotic conformal 4D printing of liquid crystal elastomers. Sci. Adv. , 12(7):2417, 2 2026
2026
-
[8]
Mylo, Anna S
David Correa, Simon Poppinga, Max D. Mylo, Anna S. Westermeier, Bernd Bruchmann, Achim Menges, and Thomas Speck. 4D pine scale: biomimetic 4D printed autonomous scale and flap structures capable of multi-phase movement. Philos. Trans. A Math. Phys. Eng. Sci. , 378(2167):1–18, 3 2020
2020
-
[9]
The Design of 4D-Printed Hygromorphs: State-of-the-Art and Future Challenges
Charles de Kergariou, Frédéric Demoly, Adam Perriman, Antoine Le Duigou, and Fabrizio Scarpa. The Design of 4D-Printed Hygromorphs: State-of-the-Art and Future Challenges. Adv. Funct. Mater. , 33(6):2210353–2210394, 2 2023
2023
-
[10]
The influence of the humidity on the mechanical properties of 3D printed con- tinuous flax fibre reinforced poly(lactic acid) composites
Charles de Kergariou, Hind Saidani-Scott, Adam Perriman, Fabrizio Scarpa, and Antoine Le Duigou. The influence of the humidity on the mechanical properties of 3D printed con- tinuous flax fibre reinforced poly(lactic acid) composites. Compos. Part A Appl. Sci. Manuf. , 155:1–12, 4 2022
2022
-
[11]
Charles de Kergariou, Findlay S. G. Smith, Richard S. Trask, Adam W. Perriman, Fabrizio Scarpa, and David Correa. Hygromnemics: Programmable Material Memory Matter Actuators via Wet Pre‐Constraining. Adv. Mater. Technol. , 8 2025
2025
-
[12]
Smith, Richard S
Charles de Kergariou, Findlay S.G. Smith, Richard S. Trask, Adam W. Perriman, Fabrizio Scarpa, and David Correa. Hygromnemics: Programmable Material Memory Matter Actuators via Wet Pre-Constraining. Advanced Materials Technologies, page e00647, 2025
2025
-
[13]
4D printing and robotics
Carmela de Marco, Salvador Pané, and Bradley J Nelson. 4D printing and robotics. 3:449, 2018
2018
-
[14]
The increase in muscle force after 4 weeks of strength training is mediated by adaptations in motor unit recruitment and rate coding
Alessandro Del Vecchio, Andrea Casolo, Francesco Negro, Matteo Scorcelletti, Ilenia Bazzucchi, Roger Enoka, Francesco Felici, and Dario Farina. The increase in muscle force after 4 weeks of strength training is mediated by adaptations in motor unit recruitment and rate coding. J. Physiol., 597(7):1873–1887, 4 2019. 23
2019
-
[15]
4D Printing: A Comprehensive Review of Tech- nologies, Materials, Stimuli, Design, and Emerging Applications
Aixiang Ding, Fang Tang, and Eben Alsberg. 4D Printing: A Comprehensive Review of Tech- nologies, Materials, Stimuli, Design, and Emerging Applications. Chem. Rev , 125:3771, 2025
2025
-
[16]
Leveraging Morphological Com- putation for Controlling Soft Robots: Learning from Nature to Control Soft Robots
Helmut Hauser, Thrishantha Nanayakkara, and Fulvio Forni. Leveraging Morphological Com- putation for Controlling Soft Robots: Learning from Nature to Control Soft Robots. IEEE Control Systems , 43(3):114–129, 6 2023
2023
-
[17]
Heckman and Roger M
C.J. Heckman and Roger M. Enoka. Motor Unit. Compr. Physiol. , 2(4):2629–2682, 10 2012
2012
-
[18]
Synthesis and application of modulated polymer gels
Zhibing Hu, Xiaomin Zhang, Yong Li, Z Hu, X Zhang, and Y Li. Synthesis and application of modulated polymer gels. Sci., 269(5223):525–527, 1995
1995
-
[19]
Closed-Loop and Sustainable 4D Printing of Multi-Stimuli-Responsive Sulfur-Rich Polymer Composites for Autonomous Task Execution
Jae Hyuk Hwang, Sukyoung Won, Ji Mok Lee, Woongbi Cho, Sungmin Park, Hyun Kim, Chang Geun Chae, Woohwa Lee, Dong Gyun Kim, Jeong Jae Wie, and Yong Seok Kim. Closed-Loop and Sustainable 4D Printing of Multi-Stimuli-Responsive Sulfur-Rich Polymer Composites for Autonomous Task Execution. Adv. Mater. , 2025
2025
-
[20]
Closed-loop 4D printing of autonomous soft robots
Qinglei Ji, Danilo Neves, Lei Feng, and Chun Zhao. Closed-loop 4D printing of autonomous soft robots. In Smart Materials in Additive Manufacturing: 4D-Printed Robotic Materials, Sensors, and Actuators , volume 3, pages 203–233. Elsevier, 1 2024
2024
-
[21]
Perriman, and Fabrizio Scarpa
Charles de Kergariou, David Correa, Adam W. Perriman, and Fabrizio Scarpa. Effective Ma- terial Stiffness in Curved Actuators. Adv. Intell. Syst. , page e202500668, 10 2025
2025
-
[22]
Magnetorheological elastomer‐based 4D printed electroactive composite actuators
Mohammadreza Lalegani Dezaki and Mahdi Bodaghi. Magnetorheological elastomer‐based 4D printed electroactive composite actuators. Sens. Actuators A Phys. , 349:114063, 1 2023
2023
-
[23]
Lee, Erwin A
Ryan H. Lee, Erwin A. B. Mulder, and Jonathan B. Hopkins. Mechanical neural networks: Architected materials that learn behaviors. Sci. Robot., 7(71), 10 2022
2022
-
[24]
Advances in 3D and 4D Printing of Soft Robotics and Their Applications
Hao Liu, Changchun Wu, Senyuan Lin, James Lam, Ning Xi, and Yonghua Chen. Advances in 3D and 4D Printing of Soft Robotics and Their Applications. Adv. Intell. Syst. , 7(6), 6 2025
2025
-
[25]
Mechanical Neural Networks with Explicit and Robust Neurons
Tie Mei, Yuan Zhou, and Chang Qing Chen. Mechanical Neural Networks with Explicit and Robust Neurons. Adv. Sci. , 11(33), 9 2024
2024
-
[26]
Physical control: A new avenue to achieve intelligence in soft robotics
Edoardo Milana, Cosimo Della Santina, Benjamin Gorissen, and Philipp Rothemund. Physical control: A new avenue to achieve intelligence in soft robotics. Sci. Robot., 10(102):7660, 5 2025. 24
2025
-
[27]
Wright, Peter L
Ali Momeni, Babak Rahmani, Benjamin Scellier, Logan G. Wright, Peter L. McMahon, Clara C. Wanjura, Yuhang Li, Anas Skalli, Natalia G. Berloff, Tatsuhiro Onodera, Ilker Oguz, Francesco Morichetti, Philipp del Hougne, Manuel Le Gallo, Abu Sebastian, Azalia Mirhoseini, Cheng Zhang, Danijela Marković, Daniel Brunner, Christophe Moser, Sylvain Gigan, Florian M...
2025
-
[28]
Morales Ferrer, Ramón E
Javier M. Morales Ferrer, Ramón E. Sánchez Cruz, Sophie Caplan, Wim M. van Rees, and J. William Boley. Multiscale Heterogeneous Polymer Composites for High Stiffness 4D Printed Electrically Controllable Multifunctional Structures. Adv. Mater. , 36(8), 2 2024
2024
-
[29]
Meteorosensitive architecture: Biomimetic building skins based on materially embedded and hygroscopically enabled responsiveness
Steffen Reichert, Achim Menges, and David Correa. Meteorosensitive architecture: Biomimetic building skins based on materially embedded and hygroscopically enabled responsiveness. Com- put. Aided Des. , 60:50–69, 3 2015
2015
-
[30]
John G. Semmler. Motor unit synchronization and neuromuscular performance. Exerc. Sport Sci. Rev. , 30(1):8–14, 2002
2002
-
[31]
James Spall, Xianxin Guo, Xianxin Guo, Xianxin Guo, A. I. Lvovsky, A. I. Lvovsky, and A. I. Lvovsky. Hybrid training of optical neural networks. Optica, Vol. 9, Issue 7, pp. 803-811 , 9(7):803–811, 7 2022
2022
-
[32]
Structural design and construction of a self-shaping single curved timber structure HygroShell
Kenryo Takahashi, Laura Kiesewetter, Axel Körner, Dylan Wood, Jan Knippers, and Achim Menges. Structural design and construction of a self-shaping single curved timber structure HygroShell. In Proceedings of the IASS 2024 Symposium , pages 1–10, 8 2024
2024
-
[33]
Machine-learned kinetic Façade: Con- struction and artificial intelligence enabled predictive control for visual comfort
Mollaeiubli Takhmasib, Hyuk Jae Lee, and Hwang Yi. Machine-learned kinetic Façade: Con- struction and artificial intelligence enabled predictive control for visual comfort. Autom. Con- str., 156:105093, 12 2023
2023
-
[34]
Mujumdar, and Chunli Li
Xiuxiu Teng, Min Zhang, Arun S. Mujumdar, and Chunli Li. 4D printed deformation labels with machine learning for monitoring and preservation of respiring climacteric fruits. Nat. Commun., 11 2025
2025
-
[35]
van de Ven, Tinne Tuytelaars, and Andreas S
Gido M. van de Ven, Tinne Tuytelaars, and Andreas S. Tolias. Three types of incremental learning. Nat. Mach. Intell. , 4(12):1185–1197, 12 2022
2022
-
[36]
A review of and taxonomy for elastic kinetic building envelopes
Elena Vazquez, David Correa, and Simon Poppinga. A review of and taxonomy for elastic kinetic building envelopes. J. Build. Eng. , 82:108227, 4 2024. 25
2024
-
[37]
Truby, Daniel J
Michael Wehner, Ryan L. Truby, Daniel J. Fitzgerald, Bobak Mosadegh, George M. Whitesides, Jennifer A. Lewis, and Robert J. Wood. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nat., 536(7617):451–455, 8 2016
2016
-
[38]
Physical neural networks using sharpness-aware training
Tengji Xu, Zeyu Luo, Shaojie Liu, Li Fan, Qiarong Xiao, Benshan Wang, Dongliang Wang, and Chaoran Huang. Physical neural networks using sharpness-aware training. Nat. Commun. , 1 2026
2026
-
[39]
Fully forward mode training for optical neural networks
Zhiwei Xue, Tiankuang Zhou, Zhihao Xu, Shaoliang Yu, Qionghai Dai, and Lu Fang. Fully forward mode training for optical neural networks. Nat., 632(8024):280–286, 8 2024
2024
-
[40]
Prototyping of 4D-printed self-shaping building skin in architecture: Design, fabrication, and investigation of a two-way shape memory composite (TWSMC) façade panel
Hwang Yi and Yuri Kim. Prototyping of 4D-printed self-shaping building skin in architecture: Design, fabrication, and investigation of a two-way shape memory composite (TWSMC) façade panel. J. Build. Eng. , 43(103076):1–15, 11 2021
2021
-
[41]
3D printing gets bigger, faster and stronger
Mark Zastrow. 3D printing gets bigger, faster and stronger. Nature, 578(7793):20–23, 2 2020
2020
-
[42]
Unper- ceivable motion mimicking hygroscopic geometric reshaping of pine cones
Feilong Zhang, Man Yang, Xuetao Xu, Xi Liu, Huan Liu, Lei Jiang, and Shutao Wang. Unper- ceivable motion mimicking hygroscopic geometric reshaping of pine cones. Nat. Mater. , pages 1–9, 11 2022
2022
-
[43]
Wojciechowski, Richard Wang, Jonathan Yeow, Yuyang Zuo, Xin Song, Chunliang Wang, Yue Shao, and Molly M
Kun Zhou, Rujie Sun, Jonathan P. Wojciechowski, Richard Wang, Jonathan Yeow, Yuyang Zuo, Xin Song, Chunliang Wang, Yue Shao, and Molly M. Stevens. 4D Multimaterial Printing of Soft Actuators with Spatial and Temporal Control. Adv. Mater. , 36(19), 5 2024. 26
2024
-
[44]
Design of the Material Actuating Neurone
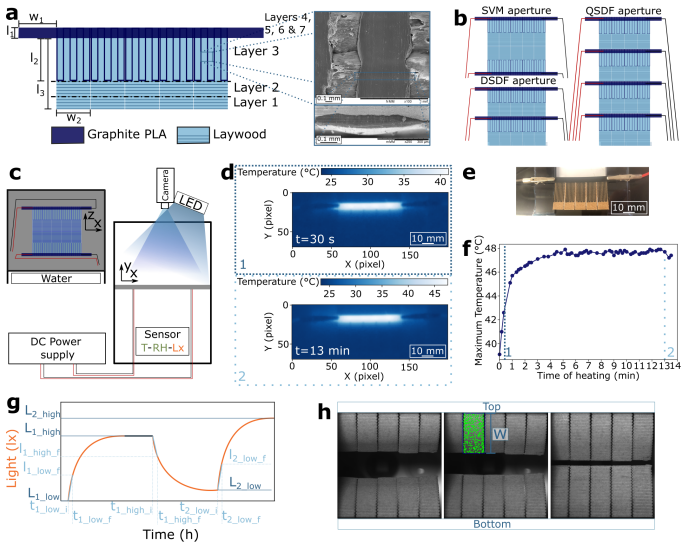
Supplementary Materials 8.1. Design of the Material Actuating Neurone. Fig. S1 shows the actuation strain, sensor light response, 95% convergence time, light change speed, light variation amplitude, and reversibility for both up-down and DSDF aperture configurations. Due to the different geometric configurations between the up down and down down test setu...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.