DART: A design-aware microfluidic chip paradigm for real-time live-cell image analysis
Pith reviewed 2026-06-26 21:24 UTC · model grok-4.3
The pith
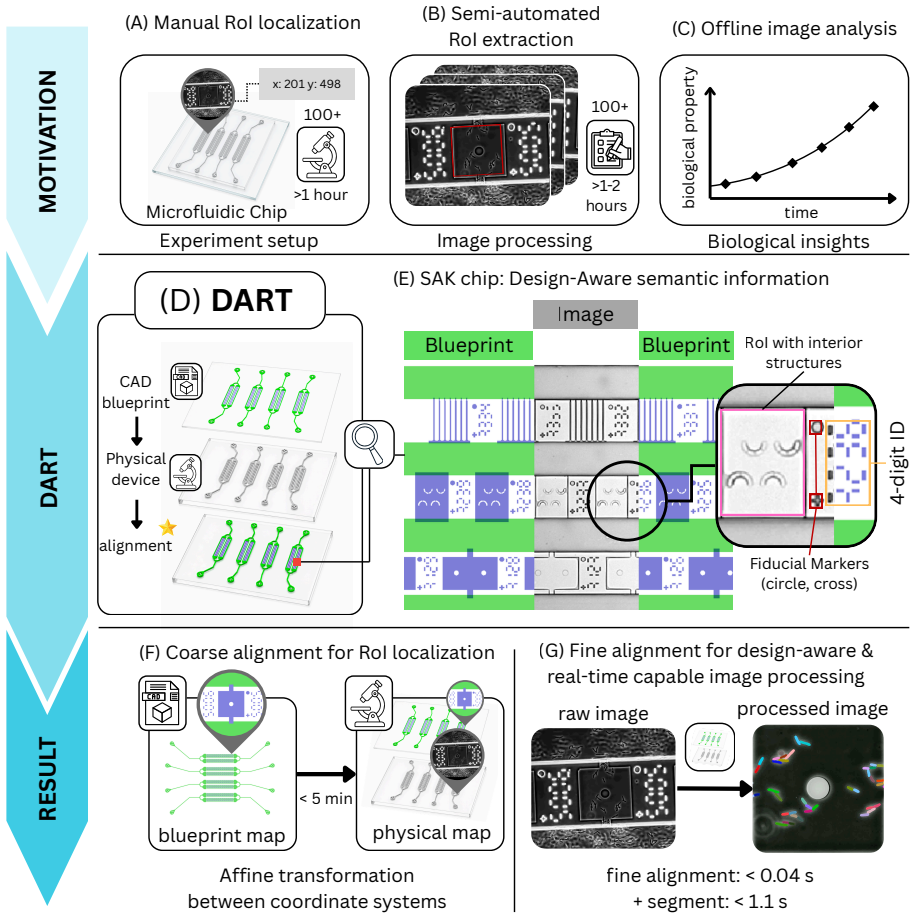
DART aligns CAD blueprints to physical microfluidic chips via fiducial markers and deep learning to enable throughput-independent real-time image analysis.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
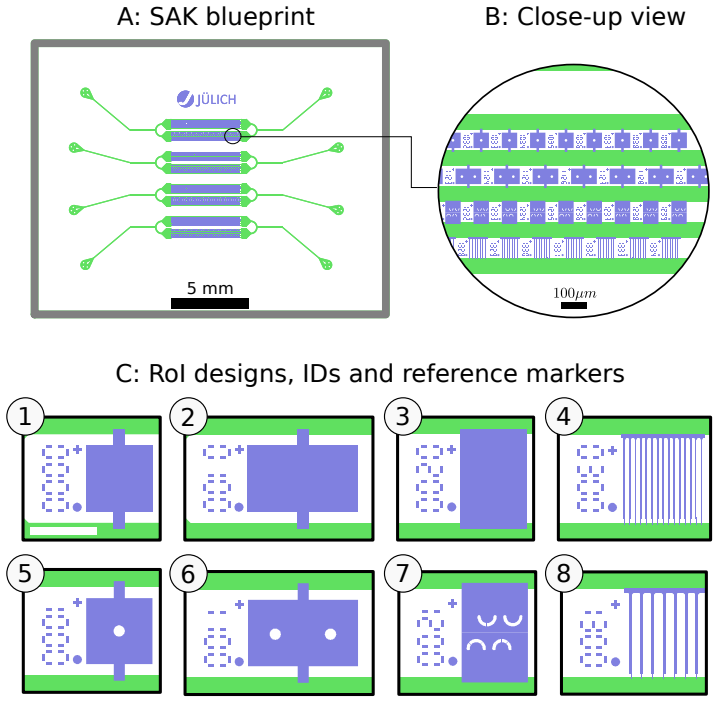
DART establishes alignment through embedded fiducial markers and deep-learning-based marker detection, enabling throughput-independent localization of all RoIs and fully automated image processing across diverse RoI geometries and chip layouts.
What carries the argument
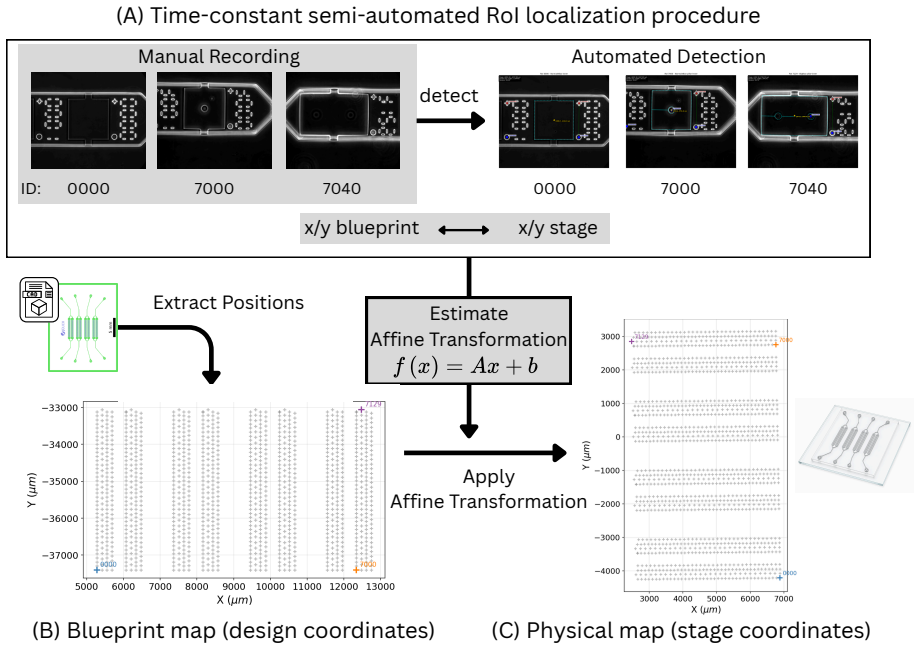
The DART paradigm, which registers the CAD blueprint to the physical chip using fiducial markers detected by a deep learning model.
If this is right
- All RoIs on a chip with 1164 locations are localized in five minutes regardless of count.
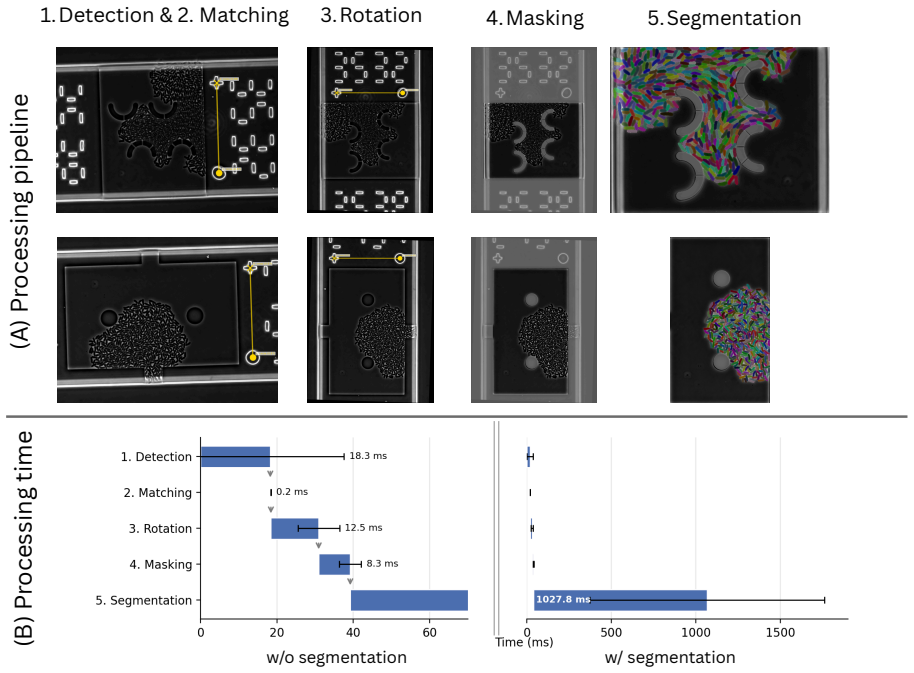
- Microfluidic structures are removed from raw images in 40 ms each.
- Fully automated cell segmentation and analysis complete in under 1.1 s per image.
- The pipeline supports closed-loop and outcome-driven smart microscopy experiments.
Where Pith is reading between the lines
- The same registration step could be combined with real-time feedback to adjust imaging parameters or fluidic conditions during an experiment.
- Marker-based alignment may transfer to microfluidic devices used for chemical assays or organ-on-chip models beyond live-cell work.
- Automated removal of device features could reduce batch-to-batch variability when the same analysis code is applied across different fabrication runs.
Load-bearing premise
Fiducial markers stay reliably detectable and produce alignment accurate enough to excise microfluidic structures without artifacts or missed cells on every layout and imaging condition.
What would settle it
A new chip layout or imaging condition where the marker detector fails on more than a few percent of markers, producing visible misalignment or cell loss after structure removal.
Figures
read the original abstract
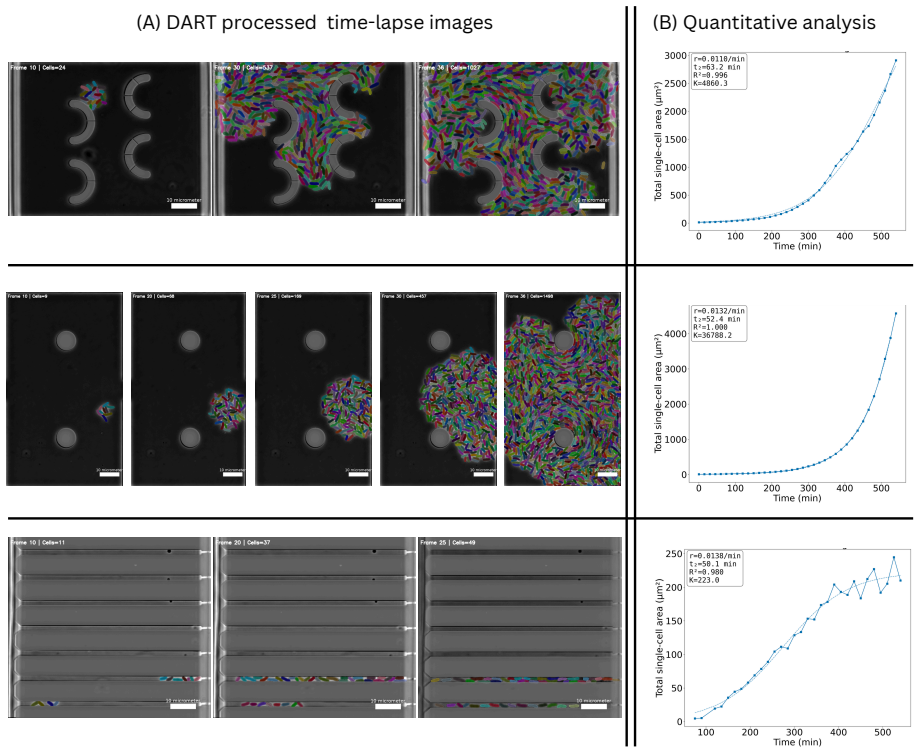
High-throughput microfluidic live-cell imaging generates rich single-cell data. Yet semi-automated procedures for locating regions of interest (RoIs), each containing one cell population, and removing surrounding microfluidic structures from recorded images, scale with the number of RoIs. This prevents real-time image analysis and delays time-to-insight by hours to days. We introduce the Design-Aware and Real-Time capable (DART) paradigm for microfluidic cultivation chips, which aligns the CAD blueprint with the physical chip and thereby enables throughput-independent localization of all RoIs and fully automated image processing across diverse RoI geometries and chip layouts. DART establishes this alignment through embedded fiducial markers and deep-learning-based marker detection. We validate DART using the Swiss Army Knife chip, which combines eight structurally distinct RoI designs across 1164 RoI locations. DART localizes all RoIs in five minutes, removes microfluidic structures from raw microscopy images in 40 ms, and performs fully automated image analysis, including cell segmentation, in under 1.1 s per image. Together, these capabilities establish DART as an end-to-end hardware-software paradigm with real-time-capable analysis that paves the way toward closed-loop and outcome-driven smart microscopy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the DART paradigm for microfluidic live-cell imaging chips. It uses embedded fiducial markers and deep-learning-based detection to align CAD blueprints with physical chips, enabling throughput-independent RoI localization and fully automated image processing (including structure removal and cell segmentation) that does not scale with the number of RoIs. Validation is reported on the Swiss Army Knife chip containing eight distinct RoI designs across 1164 locations, with claims of 5-minute localization, 40 ms structure removal, and <1.1 s per-image analysis.
Significance. If the alignment step proves robust, DART would remove a key scalability bottleneck in high-throughput microfluidic imaging by making analysis time independent of RoI count and layout diversity. This could support closed-loop smart microscopy applications. The approach is presented as a hardware-software co-design without reliance on fitted parameters or self-referential quantities.
major comments (2)
- [Validation / Results] Validation section (Swiss Army Knife chip results): The central claim that fiducial-based alignment enables artifact-free microfluidic structure removal and cell-preserving analysis rests on the unquantified assumption of sufficient DL marker detection reliability and sub-cellular alignment precision. No marker localization RMSE, post-alignment overlay error (in pixels or microns), detection precision/recall, or failure rates under changed focus/illumination/magnification are reported, despite testing 1164 RoIs on one chip design.
- [Abstract / Methods] Abstract and methods description of alignment pipeline: The claim of 'throughput-independent' and 'fully automated' processing across 'diverse RoI geometries and chip layouts' is load-bearing for the paradigm's novelty, yet the manuscript provides no cross-layout or cross-condition statistics (e.g., success rate on held-out chip designs or under imaging variations) to support generalization beyond the single tested multi-design chip.
minor comments (2)
- [Abstract] The abstract reports timing numbers (5 min, 40 ms, <1.1 s) without specifying the hardware platform or whether these include DL inference time on CPU/GPU.
- [Validation] No baseline comparisons (e.g., manual RoI annotation time or conventional template-matching alignment) are mentioned to contextualize the reported speedups.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting areas where quantitative support and generalization evidence can be strengthened. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [Validation / Results] Validation section (Swiss Army Knife chip results): The central claim that fiducial-based alignment enables artifact-free microfluidic structure removal and cell-preserving analysis rests on the unquantified assumption of sufficient DL marker detection reliability and sub-cellular alignment precision. No marker localization RMSE, post-alignment overlay error (in pixels or microns), detection precision/recall, or failure rates under changed focus/illumination/magnification are reported, despite testing 1164 RoIs on one chip design.
Authors: We agree that explicit quantitative metrics on marker detection reliability and alignment precision are not reported in the current manuscript and would strengthen the validation claims. The successful localization and processing across all 1164 RoIs on the Swiss Army Knife chip provides indirect evidence of reliability, but we will add a dedicated analysis subsection reporting detection precision/recall, localization RMSE, estimated post-alignment overlay error, and any available data on performance under focus or illumination variations from the existing experiments. revision: yes
-
Referee: [Abstract / Methods] Abstract and methods description of alignment pipeline: The claim of 'throughput-independent' and 'fully automated' processing across 'diverse RoI geometries and chip layouts' is load-bearing for the paradigm's novelty, yet the manuscript provides no cross-layout or cross-condition statistics (e.g., success rate on held-out chip designs or under imaging variations) to support generalization beyond the single tested multi-design chip.
Authors: The Swiss Army Knife chip validation incorporates eight structurally distinct RoI designs, demonstrating performance across varied geometries within one layout. We acknowledge the absence of tests on held-out chip designs or multiple independent layouts, which limits claims of broad generalization. We will revise the abstract and methods sections to more precisely scope the claims to the tested multi-design chip while retaining the throughput-independence result, and add discussion of the diversity covered by the eight RoI types. revision: partial
Circularity Check
No circularity: hardware-software paradigm with no derivations or fitted predictions
full rationale
The paper presents DART as a paradigm using embedded fiducial markers and DL-based detection to align CAD blueprints with physical chips, enabling automated RoI localization and image processing. Validation is reported on the Swiss Army Knife chip (1164 RoIs localized in 5 min, processing in 40 ms). No equations, parameter fitting to data subsets, self-citations as load-bearing premises, or renamings of known results appear in the abstract or described claims. The central claims rest on empirical system performance rather than any self-referential reduction by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Wang, P ., Robert, L., Pelletier, J., Dang, W.L., Taddei, F ., Wright, A., and Jun, S. (2010). Robust Growth of Escherichia coli. Current Biology20, 1099–1103. doi:10.1016/j.cub. 2010.04.045
-
[2]
Gr ¨unberger, A., Paczia, N., Probst, C., Schendzielorz, G., Eggeling, L., Noack, S., Wiechert, W., and Kohlheyer, D. (2012). A disposable picolitre bioreactor for cultivation and investiga- tion of industrially relevant bacteria on the single cell level. Lab on a Chip12, 2060. doi: 10.1039/c2lc40156h
-
[5]
Kaiser, M., Jug, F ., Julou, T., Deshpande, S., Pfohl, T., Silander, O.K., Myers, G., and van Nimwegen, E. (2018). Monitoring single-cell gene regulation under dynamically controllable conditions with integrated microfluidics and software. Nature Communications9, 212. doi: 10.1038/s41467-017-02505-0
-
[6]
Gr ¨unberger, A., Probst, C., Helfrich, S., Nanda, A., Stute, B., Wiechert, W., von Lieres, E., N¨oh, K., Frunzke, J., and Kohlheyer, D. (2015). Spatiotemporal microbial single-cell analysis using a high-throughput microfluidics cultivation platform. Cytometry Part A87, 1101–1115. doi:10.1002/cyto.a.22779
-
[7]
Helfrich, S., Pfeifer, E., Kr ¨amer, C., Sachs, C.C., Wiechert, W., Kohlheyer, D., N¨oh, K., and Frunzke, J. (2015). Live cell imaging of SOS and prophage dynamics in isogenic bacterial populations. Molecular Microbiology98, 636–650. doi:10.1111/mmi.13147
-
[8]
Sachs, C.C., Gr ¨unberger, A., Helfrich, S., Probst, C., Wiechert, W., Kohlheyer, D., and N¨oh, K. (2016). Image-based single cell profiling: High-throughput processing of mother machine experiments. PLOS ONE11, e0163453. doi:10.1371/journal.pone.0163453
-
[9]
Bl ¨obaum, L., T¨auber, S., and Gr¨unberger, A. (2023). Protocol to perform dynamic microflu- idic single-cell cultivation of C. glutamicum. STAR Protocols4, 102436. doi:10.1016/j. xpro.2023.102436
work page doi:10.1016/j 2023
-
[10]
O’Connor, O.M., Alnahhas, R.N., Lugagne, J.B., and Dunlop, M.J. (2022). DeLTA 2.0: A deep learning pipeline for quantifying single-cell spatial and temporal dynamics. PLOS Computational Biology18, e1009797. doi:10.1371/journal.pcbi.1009797. 19
-
[11]
Prangemeier, T., Wildner, C., Franc ¸ani, A.O., Reich, C., and Koeppl, H. (2022). Y east cell segmentation in microstructured environments with deep learning. Biosystems211, 104557. doi:10.1016/j.biosystems.2021.104557
-
[12]
Zhou, S., Chen, B., Fu, E.S., and Y an, H. (2023). Computer vision meets microfluidics: a label-free method for high-throughput cell analysis. Microsystems & Nanoengineering9. doi:10.1038/s41378-023-00562-8
-
[13]
Cutler, K.J., Stringer, C., Lo, T.W., Rappez, L., Stroustrup, N., Brook Peterson, S., Wiggins, P .A., and Mougous, J.D. (2022). Omnipose: a high-precision morphology- independent solution for bacterial cell segmentation. Nature Methods pp. 1–11. doi: 10.1038/s41592-022-01639-4
-
[14]
Stringer, C., Wang, T., Michaelos, M., and Pachitariu, M. (2020). Cellpose: a gener- alist algorithm for cellular segmentation. Nature Methods18, 100–106. doi:10.1038/ s41592-020-01018-x
2020
-
[15]
Pachitariu, M., Rariden, M., and Stringer, C. (2025). Cellpose-SAM: superhuman general- ization for cellular segmentation. bioRxiv. doi:10.1101/2025.04.28.651001
-
[16]
Marks, U., Israel, R., Van Valen, D. et al. (2025). A foundation model for cellular segmenta- tion. Nature Methods. doi:10.1038/s41592-025-02879-w
-
[17]
Archit, A., Freckmann, L., Nair, S., Khalid, N., Hilt, P ., Rajashekar, V., Freitag, M., Teuber, C., Buckley, G., von Haaren, S., Gupta, S., Dengel, A., Ahmed, S., and Pape, C. (2025). Segment anything for microscopy. Nature Methods. doi:10.1038/s41592-024-02580-4
-
[18]
Kasahara, K., Seiffarth, J., Stute, B., von Lieres, E., Drepper, T., N¨oh, K., and Kohlheyer, D. (2025). Unveiling microbial single-cell growth dynamics under rapid periodic oxygen oscil- lations. Lab on a Chip25, 2234–2246. doi:10.1039/D5LC00065C
-
[19]
Witting, L., Seiffarth, J., Stute, B., Schulze, T., Hofer, J.M., N ¨oh, K., Eisenhut, M., Weber, A.P .M., von Lieres, E., and Kohlheyer, D. (2025). A microfluidic system for the cultivation of cyanobacteria with precise light intensity and CO2 control: enabling growth data acquisition at single-cell resolution. Lab on a Chip25, 319–329. doi:10.1039/D4LC00567H
-
[20]
Dal Co, A., van Vliet, S., Kiviet, D.J., Schlegel, S., and Ackermann, M. (2020). Short-range interactions govern the dynamics and functions of microbial communities. Nature Ecology & Evolution4, 366–375. doi:10.1038/s41559-019-1080-2
-
[21]
Thiermann, R., Sandler, M., Ahir, G., Sauls, J.T., Schroeder, J., Brown, S., Le Treut, G., Si, F ., Li, D., Wang, J.D., and Jun, S. (2024). Tools and methods for high-throughput single-cell imaging with the mother machine. eLife12, RP88463. doi:10.7554/eLife.88463. 20
-
[22]
Lugagne, J.B., Blassick, C.M., and Dunlop, M.J. (2024). Deep model predictive control of gene expression in thousands of single cells. Nature Communications15. doi:10.1038/ s41467-024-46361-1
2024
-
[23]
Merrin, J. (2019). Frontiers in Microfluidics, a Teaching Resource Review. Bioengineering 6, 109. doi:10.3390/bioengineering6040109
-
[24]
Long, Z., Nugent, E., Javer, A., Cicuta, P ., Sclavi, B., Lagomarsino, M.C., and Dorfman, K.D. (2013). Microfluidic chemostat for measuring single cell dynamics in bacteria. Lab on a Chip13, 947–954. doi:10.1039/C2LC41196B
-
[25]
Shi, Y ., Tabet, J.S., Milkie, D.E., Daugird, T.A., Y ang, C.Q., Ritter, A.T., Giovannucci, A., and Legant, W.R. (2024). Smart lattice light-sheet microscopy for imaging rare and complex cellular events. Nature Methods. doi:10.1038/s41592-023-02126-0
-
[26]
Waithe, D., Brown, J.M., Reglinski, K., Diez-Sevilla, I., Roberts, D., and Eggeling, C. (2020). Object detection networks and augmented reality for cellular detection in fluorescence mi- croscopy. Journal of Cell Biology219. doi:10.1083/jcb.201903166
-
[27]
Al-Hamadani, M.N.A., Poroszlay, R., Szeman-Nagy, G., Hajdu, A., Hadjidemetriou, S., Ferrarini, L., and Harangi, B. (2025). Improving cell detection and tracking in microscopy images using YOLO and an enhanced DeepSORT algorithm. Sensors25, 4361. doi: 10.3390/s25144361
-
[28]
Jocher, G., Qiu, J., and Chaurasia, A. (2023). Ultralytics YOLO. GitHub. URL:https: //github.com/ultralytics/ultralytics. doi:10.5281/zenodo.7347926
-
[29]
Chiron, L., Le Bec, M., Cordier, C., Pouzet, S., Milunov, D., Banderas, A., Di Meglio, J.M., Sorre, B., and Hersen, P . (2022). CyberSco.Py an open-source software for event-based, conditional microscopy. Scientific Reports12, 11579. doi:10.1038/s41598-022-15207-5
-
[30]
Passmore, J.B., Rates, A., Schr ¨oder, J., van Laarhoven, M.T.P ., Hellebrekers, V.J.W., van Hoef, H.G., Geurts, A.J.M., van Straaten, W., Nijenhuis, W., Berger, F ., Smith, C.S., Smal, I., and Kapitein, L.C. (2025). Closed-loop optogenetic control of cell biology enables outcome- driven microscopy. Nature Communications17, 1087. doi:10.1038/s41467-025-67848-5
-
[31]
Gruenberger, A., Probst, C., Heyer, A., Wiechert, W., Frunzke, J., and Kohlheyer, D. (2013). Microfluidic picoliter bioreactor for microbial single-cell analysis: Fabrication, system setup, and operation. Journal of Visualized Experiments. URL:https://app.jove.com/t/50560. doi:10.3791/50560
-
[32]
Ravi, N., Gabeur, V., Hu, Y .T., Hu, R., Ryali, C., Ma, T., Khedr, H., R ¨adle, R., Rolland, C., Gustafson, L., Mintun, E., Pan, J., Alwala, K.V., Carion, N., Wu, C.Y ., Girshick, R., Doll´ar, P ., and Feichtenhofer, C. (2024). SAM 2: Segment Anything in Images and Videos. arXiv. doi: 10.48550/arXiv.2408.00714. 21
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2408.00714 2024
-
[33]
Riba, E., Mishkin, D., Ponsa, D., Rublee, E., and Bradski, G. (2020). Kornia: an open source differentiable computer vision library for PyTorch. In 2020 IEEE Winter Conference on Applications of Computer Vision (WACV). pp. 3663–3672. doi:10.1109/WACV45572. 2020.9093363
-
[34]
Bradski, G. (2000). The OpenCV library. Dr. Dobb’s Journal of Software Tools
2000
-
[35]
Gillies, S., van der Wel, C., Van den Bossche, J., Taves, M.W., Arnott, J., Ward, B.C. et al. (2007). Shapely. GitHub. URL:https://github.com/shapely/shapely. doi: 10.5281/zenodo.5597138
-
[36]
Gillies, S. et al. (2013). Rasterio: geospatial raster i/o for Python programmers. GitHub. URL:https://github.com/rasterio/rasterio
2013
-
[37]
Zwietering, M.H., Jongenburger, I., Rombouts, F .M., and van ’t Riet, K. (1990). Modeling of the bacterial growth curve. Applied and Environmental Microbiology56, 1875–1881. doi: 10.1128/aem.56.6.1875-1881.1990
-
[38]
SciPy1.0: FundamentalalgorithmsforscientificcomputinginPython,
Virtanen, P ., Gommers, R., Oliphant, T.E., Haberland, M., Reddy, T., Cournapeau, D., Burovski, E., Peterson, P ., Weckesser, W., Bright, J., van der Walt, S.J., Brett, M., Wilson, J., Millman, K.J., Mayorov, N., Nelson, A.R.J., Jones, E., Kern, R., Larson, E., Carey, C.J., Po- lat, ˙I., Feng, Y ., Moore, E.W., VanderPlas, J., Laxalde, D., Perktold, J., C...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.