Observability and Consistency Analysis for Visual-Inertial Navigation with Anchored Feature Parameterizations
Pith reviewed 2026-06-26 20:58 UTC · model grok-4.3
The pith
Anchored feature parameterizations in VINS make the unobservable subspace independent of landmark estimates, improving consistency without modifications.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
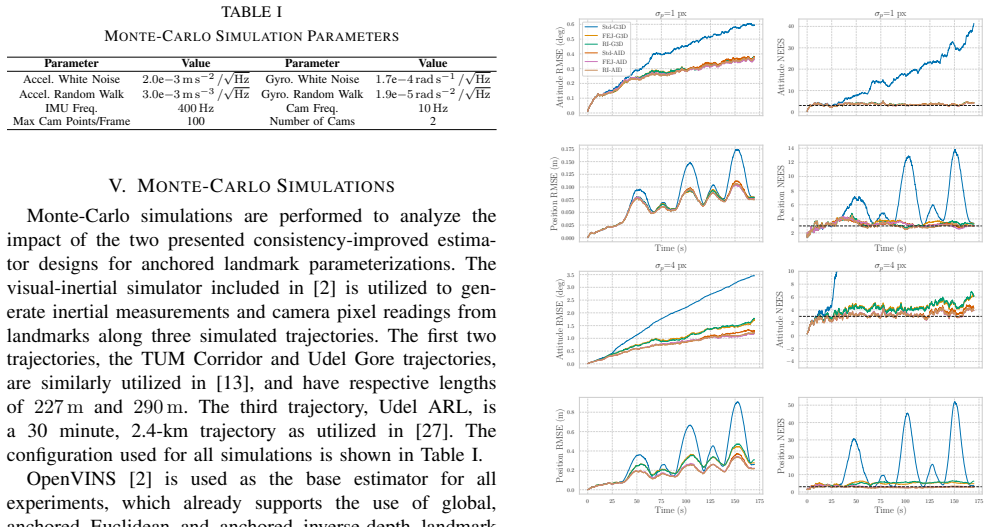
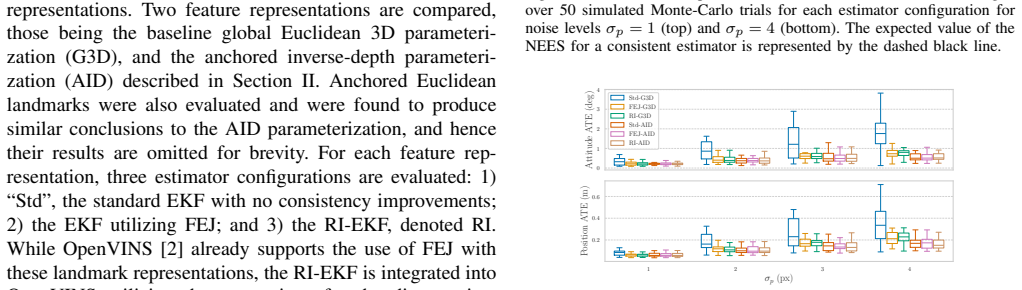
The unobservable subspace of VINS with anchored landmark parameterizations is shown to be independent of the estimated landmark state, which leads to improved estimator consistency properties without any additional modifications. However, the unobservable subspace is still found to depend on the estimated navigation state, necessitating additional consistency-enforcing techniques. Two methods to improve the consistency of VINS with anchored feature representations are presented.
What carries the argument
Anchored feature parameterizations, which represent landmarks relative to an anchor point in the initial observation rather than a global frame, carrying the independence of the unobservable subspace from landmark estimates.
Load-bearing premise
The analysis assumes the standard dynamic and measurement models of filtering-based VINS accurately represent the system when using anchored feature parameterizations.
What would settle it
Computing the unobservable subspace for different estimated landmark positions and finding that the subspace changes would falsify the claimed independence from the landmark state.
Figures
read the original abstract
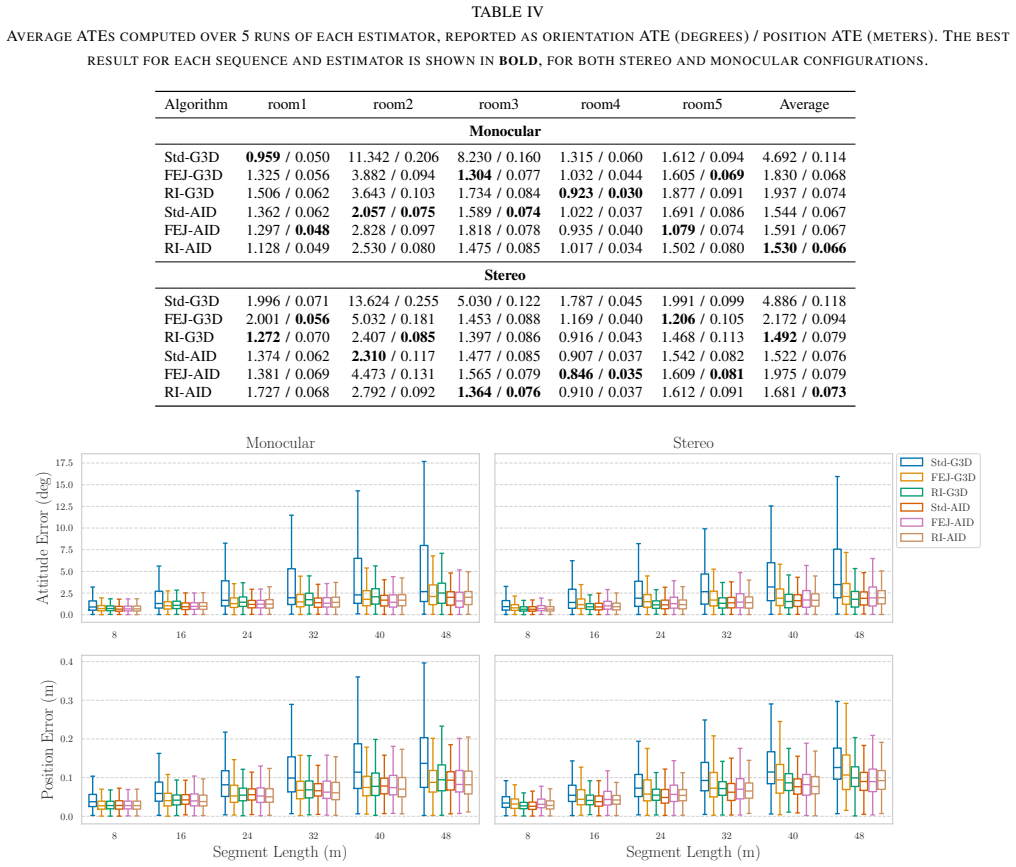
This paper presents an analysis of the observability and consistency properties of filtering-based visual-inertial navigation systems (VINS) that utilize anchored feature representations. The unobservable subspace of VINS with anchored landmark parameterizations is shown to be independent of the estimated landmark state, which leads to improved estimator consistency properties without any additional modifications. However, the unobservable subspace is still found to depend on the estimated navigation state, necessitating additional consistency-enforcing techniques. Two methods to improve the consistency of VINS with anchored feature representations are presented. Simulation results showcase that all estimators employing anchored feature paramterizations exhibit improved consistency properties compared to algorithms that estimate features resolved in a global reference frame, especially in scenarios where feature initialization may be poor. Real-world experiments on the TUM-VI dataset showcase that the use of anchored feature representations alone can yield comparable performance to consistency-improved estimators employing a global feature representation, demonstrating the benefit of using anchored feature parameterizations for VINS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript analyzes the observability and consistency properties of filtering-based visual-inertial navigation systems (VINS) that use anchored feature parameterizations. It shows that the unobservable subspace is independent of the estimated landmark states (while remaining dependent on navigation states), which yields improved consistency without extra modifications. Two additional consistency-enforcing techniques are proposed. Monte Carlo simulations and TUM-VI experiments are used to demonstrate that anchored representations improve consistency relative to global-feature baselines, especially under poor initialization, and can achieve comparable performance to consistency-enhanced global methods.
Significance. If the Jacobian-based observability derivation holds, the result supplies a concrete theoretical reason why anchored landmark parameterizations can mitigate inconsistency in VINS without auxiliary techniques, a practical advantage for robotics navigation pipelines. The combination of standard dynamic/measurement models, explicit subspace analysis, and both simulated and real-world validation on TUM-VI strengthens the contribution relative to purely empirical consistency fixes.
minor comments (3)
- Abstract: 'paramterizations' is a typographical error and should read 'parameterizations'. The same spelling appears in the title and body; a global search-and-replace is needed.
- Abstract and §1: the phrase 'without any additional modifications' is repeated; a single concise statement would improve readability.
- The manuscript should explicitly state the linearization point used for the observability matrix (e.g., the estimated state at each time step) so that readers can reproduce the independence claim from the supplied Jacobians.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. The report raises no specific major comments requiring point-by-point rebuttal.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper performs an observability analysis by constructing the system Jacobians from standard VINS dynamic and measurement models with anchored feature parameterizations. The claimed independence of the unobservable subspace from landmark states follows directly from the structure of those Jacobians (as stated in the abstract), without any reduction to fitted parameters, self-definitions, or load-bearing self-citations. No equations or steps in the provided text equate a result to its own inputs by construction. The Monte Carlo and TUM-VI validations are external checks, not internal redefinitions. This is a standard first-principles linear-algebraic analysis of an estimator model.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Standard nonlinear observability analysis applies to the VINS filtering model
- domain assumption Anchored feature parameterization is correctly formulated within the VINS state vector
Reference graph
Works this paper leans on
-
[1]
A multi-state constraint Kalman filter for vision-aided inertial navigation,
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint Kalman filter for vision-aided inertial navigation,” inProc. IEEE Int. Conf. Robot. Automat., Apr. 2007, 3565–3572
2007
-
[2]
Open- VINS: A research platform for visual-inertial estimation,
P. Geneva, K. Eckenhoff, W. Lee, Y . Yang, and G. Huang, “Open- VINS: A research platform for visual-inertial estimation,” inProc. IEEE Int. Conf. Robot. Automat., May 2020, 4666–4672
2020
-
[3]
An observability- constrained sliding window filter for SLAM,
G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis, “An observability- constrained sliding window filter for SLAM,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2011, 65–72
2011
-
[4]
VINS-Mono: A robust and versa- tile monocular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “VINS-Mono: A robust and versa- tile monocular visual-inertial state estimator,”IEEE Trans. Robot., vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[5]
Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,
S. Leutenegger, S. Lynen, M. Bosse, R. Siegwart, and P. Furgale, “Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,”Int. J. Robot. Res., vol. 34, no. 3, 314–334, Mar. 2015
2015
-
[6]
Is iteration worth it? Revisiting its impact in sliding-window VIO,
C. Chen, Y . Peng, and G. Huang, “Is iteration worth it? Revisiting its impact in sliding-window VIO,” inProc. IEEE Int. Conf. Robot. Automat., 2025, pp. 1060–1066
2025
-
[7]
FEJ2: A consistent visual-inertial state estimator design,
C. Chen, Y . Yang, P. Geneva, and G. Huang, “FEJ2: A consistent visual-inertial state estimator design,” inProc. IEEE Int. Conf. Robot. Automat., 2022, pp. 9506–9512
2022
-
[8]
The belief roadmap: Efficient planning in belief space by factoring the covariance,
S. Prentice and N. Roy, “The belief roadmap: Efficient planning in belief space by factoring the covariance,”Int. J. Robot. Res., vol. 28, no. 11-12, pp. 1448–1465, 2009
2009
-
[9]
Multimodal semantic SLAM with probabilistic data association,
K. Doherty, D. Fourie, and J. Leonard, “Multimodal semantic SLAM with probabilistic data association,” inProc. IEEE Int. Conf. Robot. Automat., 2019, pp. 2419–2425
2019
-
[10]
Consistency analysis and improvement of vision-aided inertial nav- igation,
J. A. Hesch, D. G. Kottas, S. L. Bowman, and S. I. Roumeliotis, “Consistency analysis and improvement of vision-aided inertial nav- igation,”IEEE Trans. Robot., vol. 30, no. 1, pp. 158–176, 2013
2013
-
[11]
A first-estimates Jacobian EKF for improving slam consistency,
G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis, “A first-estimates Jacobian EKF for improving slam consistency,” inProc. Int. Symp. Exp. Robot., Springer, 2009, pp. 373–382
2009
-
[12]
High-precision, consistent EKF-based visual-inertial odometry,
M. Li and A. I. Mourikis, “High-precision, consistent EKF-based visual-inertial odometry,”Int. J. Robot. Res., vol. 32, no. 6, pp. 690– 711, 2013
2013
-
[13]
Decoupled right-invariant error states for consistent visual-inertial navigation,
Y . Yang, C. Chen, W. Lee, and G. Huang, “Decoupled right-invariant error states for consistent visual-inertial navigation,”IEEE Robot. Automat. Lett., vol. 7, no. 2, 1627–1634, Apr. 2022
2022
-
[14]
An invariant-EKF VINS algorithm for improving consistency,
K. Wu, T. Zhang, D. Su, S. Huang, and G. Dissanayake, “An invariant-EKF VINS algorithm for improving consistency,” inProc. IEEE/RSJ Int. Conf. Intell Robot. Syst., 2017, pp. 1578–1585
2017
-
[15]
Robocentric visual–inertial odometry,
Z. Huai and G. Huang, “Robocentric visual–inertial odometry,”Int. J. Robot. Res. (IJRR), vol. 41, no. 7, pp. 667–689, 2022
2022
-
[16]
T-ESKF: transformed error-state Kalman filter for consistent visual-inertial navigation,
C. Tian, N. Hao, and F. He, “T-ESKF: transformed error-state Kalman filter for consistent visual-inertial navigation,”IEEE Robot. Automat. Lett., vol. 10, no. 2, pp. 1808–1815, 2025
2025
-
[17]
Affine EKF: Exploring and utiliz- ing sufficient and necessary conditions for observability maintenance to improve EKF consistency,
Y . Song, L. Zhao, and S. Huang, “Affine EKF: Exploring and utiliz- ing sufficient and necessary conditions for observability maintenance to improve EKF consistency,”IEEE Trans. Robot., 2026
2026
-
[18]
Unified inverse depth parametrization for monocular SLAM,
J. M. Montiel, J. Civera, and A. J. Davison, “Unified inverse depth parametrization for monocular SLAM,” inRobotics: Science and Systems, vol. 3, 2006, pp. 1–8
2006
-
[19]
Inverse depth parametrization for monocular slam,
J. Civera, A. J. Davison, and J. M. M. Montiel, “Inverse depth parametrization for monocular slam,”IEEE Trans. Robot., vol. 24, no. 5, 932–945, Oct. 2008
2008
-
[20]
Impact of landmark parameterization on monocular EKF-SLAM with points and lines,
J. Sola, T. Vidal-Calleja, J. Civera, and J. M. M. Montiel, “Impact of landmark parameterization on monocular EKF-SLAM with points and lines,”Int. J. Comput. Vis., vol. 97, no. 3, pp. 339–368, 2012
2012
-
[21]
A comparative analysis of tightly-coupled monocular, binocular, and stereo VINS,
M. K. Paul, K. Wu, J. A. Hesch, E. D. Nerurkar, and S. I. Roumelio- tis, “A comparative analysis of tightly-coupled monocular, binocular, and stereo VINS,” inProc. IEEE Int. Conf. Robot. Automat., 2017, pp. 165–172
2017
-
[22]
The TUM-VI benchmark for evaluating visual-inertial odometry,
D. Schubert, T. Goll, N. Demmel, V . Usenko, J. St ¨uckler, and D. Cremers, “The TUM-VI benchmark for evaluating visual-inertial odometry,” inProc. IEEE/RSJ Int. Conf. Intell Robot. Syst., 2018, pp. 1680–1687
2018
-
[23]
Stochastic cloning: A general- ized framework for processing relative state measurements,
S. I. Roumeliotis and J. W. Burdick, “Stochastic cloning: A general- ized framework for processing relative state measurements,” inProc. IEEE Int. Conf. Robot. Automat., vol. 2, 2002, pp. 1788–1795
2002
-
[24]
A micro Lie theory for state estimation in robotics,
J. Sol `a, J. Deray, and D. Atchuthan, “A micro Lie theory for state estimation in robotics,” 2021, arXiv:1812.01537
-
[25]
Farrell,Aided Navigation: GPS with High-Rate Sensors
J. Farrell,Aided Navigation: GPS with High-Rate Sensors. McGraw- Hill, Inc., 2008
2008
-
[26]
Local observability matrix and its application to observability analyses,
Z. Chen, K. Jiang, and J. C. Hung, “Local observability matrix and its application to observability analyses,” inProc. IEEE Int. Conf. Ind. Electron. Soc., 1990, pp. 100–103
1990
-
[27]
√ VINS: Robust and ultrafast square-root filter-based 3d motion tracking,
Y . Peng, C. Chen, K. Wu, and G. Huang, “ √ VINS: Robust and ultrafast square-root filter-based 3d motion tracking,”IEEE Trans. Robot., vol. 41, pp. 6570–6589, 2025
2025
-
[28]
Visual-inertial odometry on resource-constrained systems,
M. Li, “Visual-inertial odometry on resource-constrained systems,” Ph.D. dissertation, 2014
2014
-
[29]
A tutorial on quantitative trajectory evaluation for visual(-inertial) odometry,
Z. Zhang and D. Scaramuzza, “A tutorial on quantitative trajectory evaluation for visual(-inertial) odometry,” inProc. IEEE/RSJ Int. Conf. Intell Robot. Syst., 2018, pp. 7244–7251
2018
-
[30]
Optimization- Based VINS: consistency, marginalization, and FEJ,
C. Chen, P. Geneva, Y . Peng, W. Lee, and G. Huang, “Optimization- Based VINS: consistency, marginalization, and FEJ,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2023, pp. 1517–1524
2023
-
[31]
Visual- inertial-wheel odometry with online calibration,
W. Lee, K. Eckenhoff, Y . Yang, P. Geneva, and G. Huang, “Visual- inertial-wheel odometry with online calibration,” inIEEE/RSJ Int. Conf. Intell. Robot. Syst., 2020, pp. 4559–4566
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.