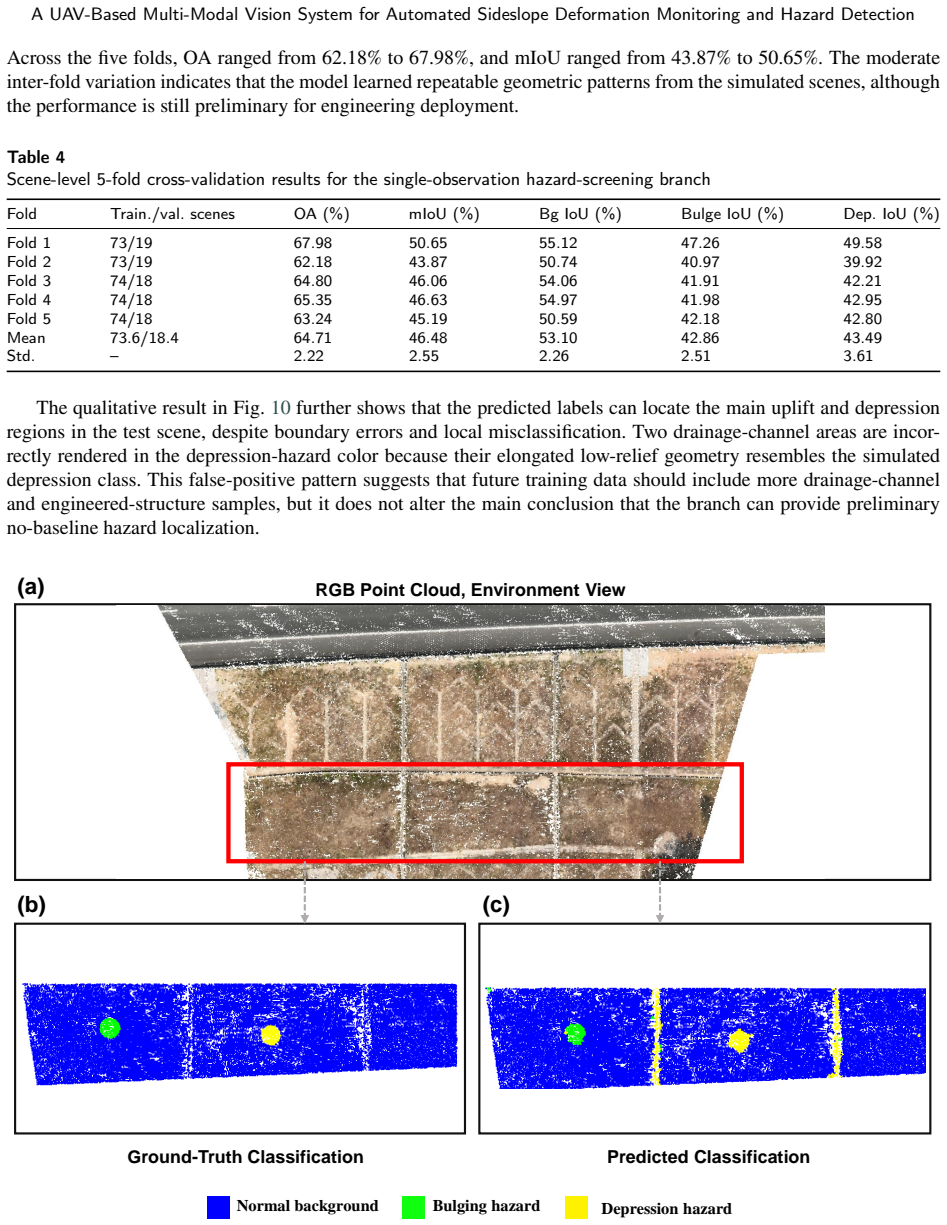
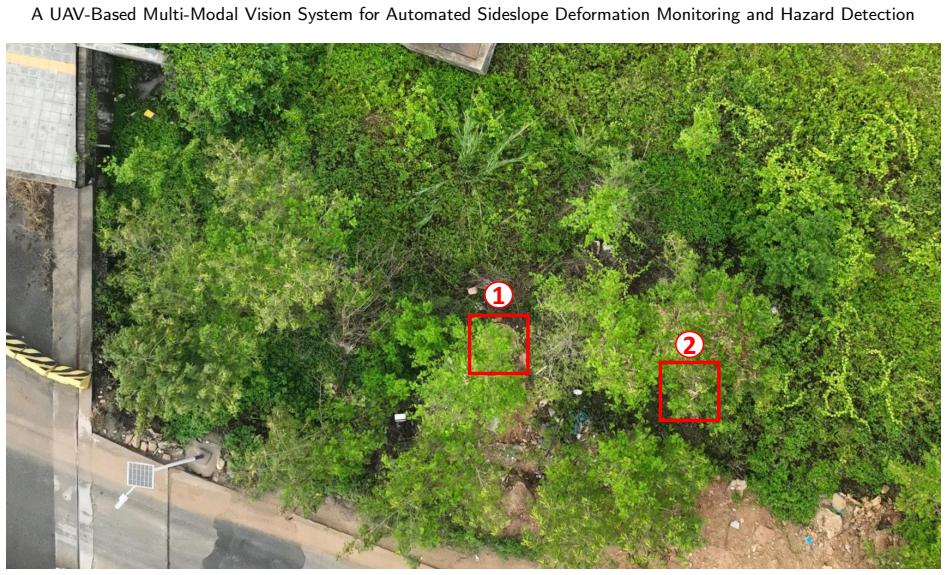
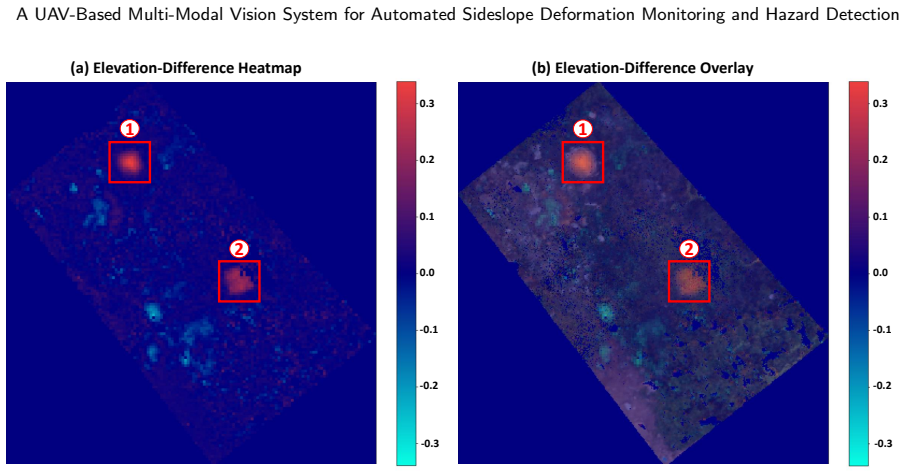
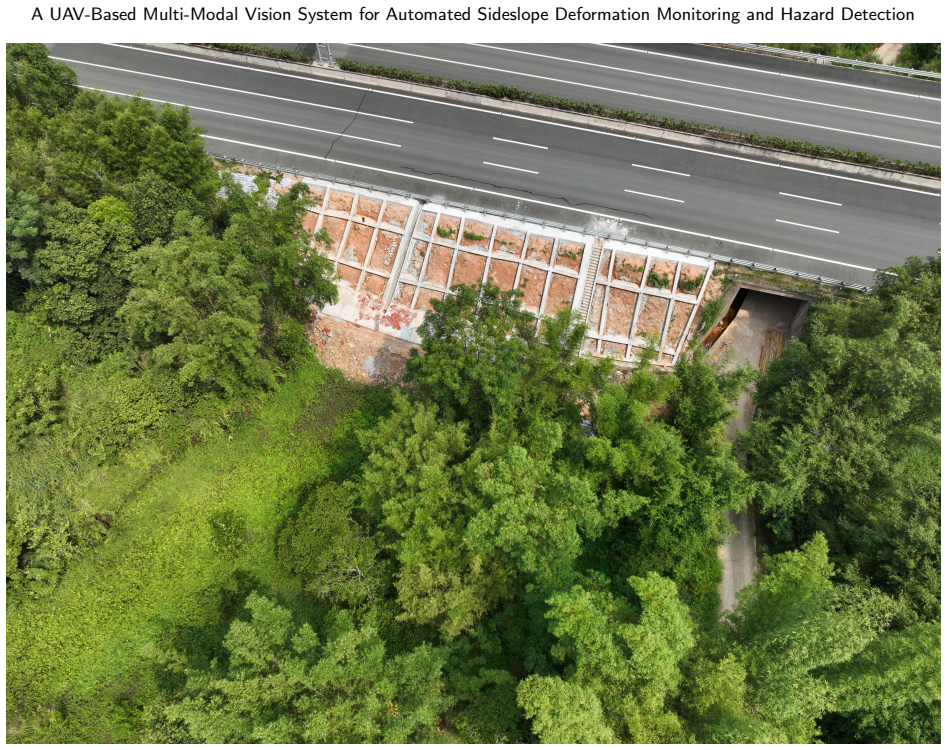
A UAV-Based Multi-Modal Vision System for Automated Sideslope Deformation Monitoring and Hazard Detection
Pith reviewed 2026-06-27 03:54 UTC · model grok-4.3
The pith
UAV LiDAR workflow extracts ground point clouds under vegetation, screens hazards from single scans, and measures centimeter-level slope deformations over time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
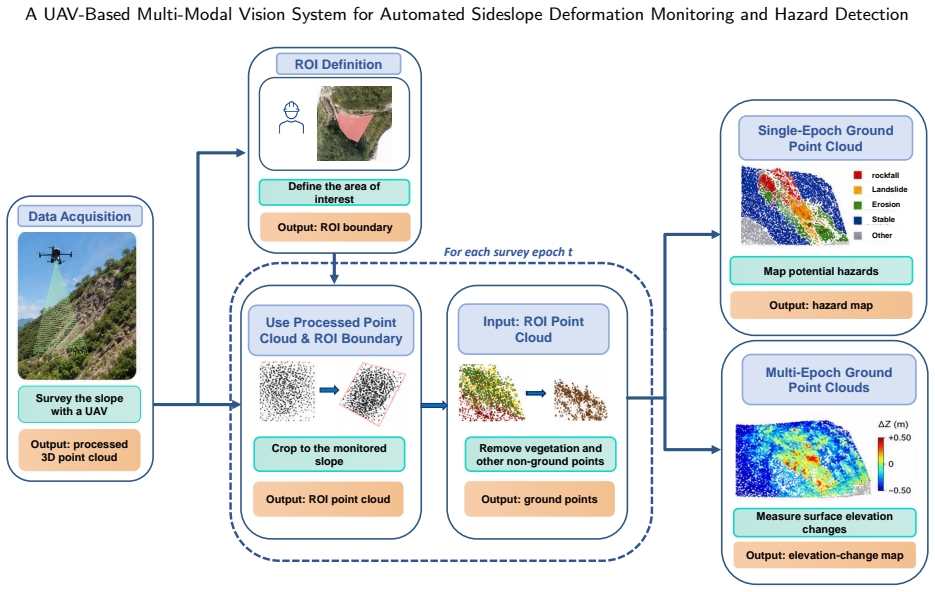
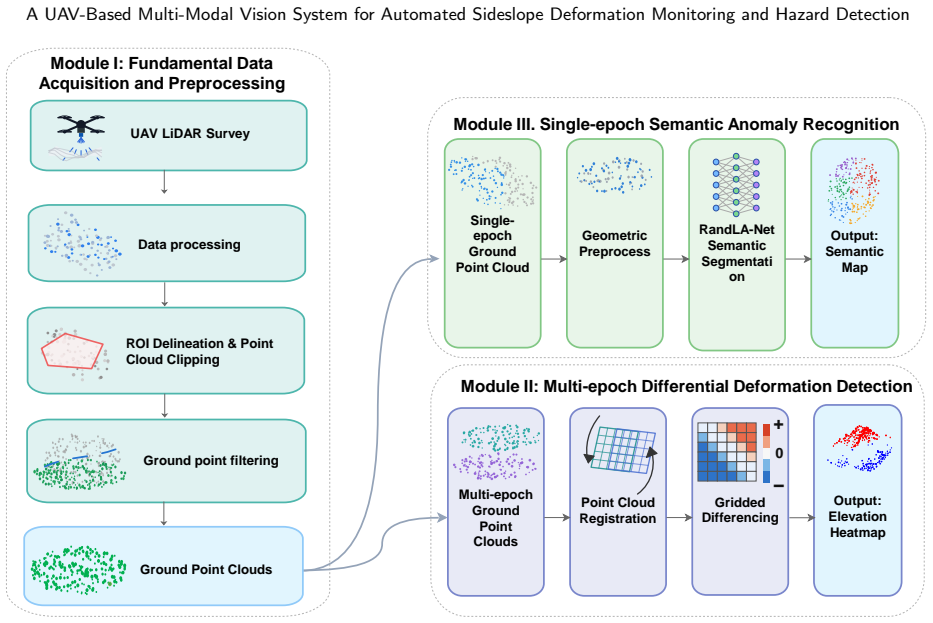
The workflow consists of a shared data-acquisition and ground-surface extraction stage, a single-observation hazard-screening branch based on RandLA-Net, and a multi-epoch deformation-monitoring branch based on grid-wise elevation differencing. In field tests the system extracts usable ground-surface point clouds under vegetation cover, identifies potential hazard zones from single-observation point clouds, and quantifies centimeter-level elevation changes using multi-epoch grid differencing, thereby establishing an end-to-end UAV-borne LiDAR solution for slope inspection.
What carries the argument
RandLA-Net-based single-observation hazard screening combined with grid-wise elevation differencing on multi-epoch ground point clouds.
If this is right
- Ground-surface point clouds become extractable even when vegetation is present.
- Potential hazard zones can be identified from data collected in a single flight.
- Centimeter-level elevation changes can be quantified by comparing grid elevations across separate observation epochs.
- The combined pipeline supplies an implementable automated alternative to manual slope inspection.
Where Pith is reading between the lines
- The same acquisition flights could support both immediate hazard flagging and long-term trend tracking without additional hardware.
- Integration with scheduled maintenance windows might allow continuous monitoring of high-risk sections without closing lanes.
- Similar point-cloud differencing could be tested on other linear infrastructure such as railway embankments or pipeline corridors.
Load-bearing premise
The RandLA-Net model separates ground from vegetation and flags true hazards on varied real-world expressway slopes without excessive false positives or missed events.
What would settle it
A controlled slope with documented vegetation cover and a known centimeter-scale deformation that the workflow either misses or misclassifies as a hazard zone.
Figures

read the original abstract
Slope hazards constitute a major safety threat to expressway infrastructure, and their evolution is typically manifested as slow surface deformation. Conventional manual inspection suffers from low efficiency and inadequate operational safety, especially on severely deteriorated slopes. Accordingly, there is an urgent need for an automated, high-precision solution capable of large-area slope observation and analysis. This study aims to develop a highly automated workflow for slope hazard detection using Unmanned Aerial Vehicle (UAV)-borne Light Detection and Ranging (LiDAR). The proposed workflow consists of a shared data-acquisition and ground-surface extraction stage, a single-observation hazard-screening branch based on RandLA-Net, and a multi-epoch deformation-monitoring branch based on grid-wise elevation differencing. To validate the effectiveness of the proposed system, we conducted multiple UAV-borne LiDAR data-acquisition flights in real expressway slope environments. The results show that the workflow can extract usable ground-surface point clouds under vegetation cover, identify potential hazard zones from single-observation point clouds, and quantify centimeter-level elevation changes using multi-epoch grid differencing. This study establishes an end-to-end UAV-borne LiDAR-based workflow for slope inspection and demonstrates its feasibility through controlled experiments, field tests, and simulation-based validation, thereby providing an implementable solution for automated slope-hazard monitoring and intelligent early warning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an end-to-end UAV-LiDAR workflow for automated expressway sideslope hazard detection and deformation monitoring. It comprises a shared acquisition and ground-surface extraction stage, a single-observation branch that applies RandLA-Net to screen for hazards from individual point clouds, and a multi-epoch branch that performs grid-wise elevation differencing to quantify surface changes. The authors report field tests on real expressway slopes and claim that the system extracts usable ground points under vegetation, identifies potential hazard zones, and measures centimeter-level elevation changes.
Significance. A quantitatively validated version of this workflow would address a practical infrastructure-safety need by replacing labor-intensive manual inspections with repeatable, large-area UAV observations. The combination of semantic segmentation for single-pass hazard flagging and direct grid differencing for change detection is a straightforward engineering contribution whose value hinges on demonstrated accuracy under realistic vegetation and slope conditions.
major comments (3)
- [Results / Validation] Results section (and abstract): the central claim that RandLA-Net reliably separates ground from vegetation and flags true hazards rests on unquantified field-test outcomes. No precision, recall, IoU, or false-positive rates are reported for the expressway-slope UAV-LiDAR datasets, nor is a test-set construction or training/adaptation procedure described. This absence directly undermines the generalization assertion for the single-observation branch.
- [Methods] Methods (RandLA-Net branch): without baseline comparisons (e.g., CSF, PMF, or other ground-filtering algorithms) or an ablation on vegetation density, it is impossible to judge whether the reported qualitative success is attributable to RandLA-Net or to the preceding ground-extraction stage.
- [Methods / Results] Multi-epoch branch: the claim of “centimeter-level” elevation change detection via grid differencing lacks an error-propagation analysis or registration-accuracy assessment between epochs; the reported precision cannot be evaluated without these numbers.
minor comments (2)
- [Abstract] The abstract states “simulation-based validation” yet the manuscript provides no description of the simulation setup or how it complements the field data.
- [Methods] Notation for grid size, epoch alignment, and vegetation-removal thresholds should be defined explicitly in the methods rather than left to figure captions.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which identify key areas where additional rigor will strengthen the manuscript. We address each major comment below and commit to revisions that provide the requested quantitative support and analyses.
read point-by-point responses
-
Referee: [Results / Validation] Results section (and abstract): the central claim that RandLA-Net reliably separates ground from vegetation and flags true hazards rests on unquantified field-test outcomes. No precision, recall, IoU, or false-positive rates are reported for the expressway-slope UAV-LiDAR datasets, nor is a test-set construction or training/adaptation procedure described. This absence directly undermines the generalization assertion for the single-observation branch.
Authors: We agree that quantitative metrics are required to substantiate the claims. The present manuscript reports only qualitative outcomes from field tests. In revision we will add a dedicated quantitative evaluation subsection that reports precision, recall, IoU and false-positive rates on held-out expressway-slope test sets, together with explicit descriptions of test-set construction and the RandLA-Net training/adaptation procedure. revision: yes
-
Referee: [Methods] Methods (RandLA-Net branch): without baseline comparisons (e.g., CSF, PMF, or other ground-filtering algorithms) or an ablation on vegetation density, it is impossible to judge whether the reported qualitative success is attributable to RandLA-Net or to the preceding ground-extraction stage.
Authors: The observation is correct; the manuscript does not contain such comparisons. We will incorporate baseline experiments against CSF and PMF as well as an ablation study across vegetation-density strata to isolate the contribution of the RandLA-Net stage. revision: yes
-
Referee: [Methods / Results] Multi-epoch branch: the claim of “centimeter-level” elevation change detection via grid differencing lacks an error-propagation analysis or registration-accuracy assessment between epochs; the reported precision cannot be evaluated without these numbers.
Authors: We acknowledge the absence of a formal uncertainty analysis. The centimeter-level figures derive from observed field differences, but registration accuracy and error propagation are not quantified. The revision will add inter-epoch registration-error statistics and an error-propagation treatment for the grid-differencing step. revision: yes
Circularity Check
No significant circularity; standard methods applied without self-referential reduction
full rationale
The workflow relies on established components (RandLA-Net segmentation and grid-wise differencing) applied to new UAV-LiDAR slope data. No equations, fitted parameters, or predictions are shown to reduce by construction to the inputs. Claims of ground extraction and hazard identification rest on experimental validation rather than definitional equivalence or self-citation chains. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption RandLA-Net segmentation produces reliable ground-surface extraction and hazard labels on real expressway slopes under vegetation
- domain assumption Multi-epoch grid-wise elevation differencing can isolate true centimeter-scale deformation from registration, vegetation, and sensor noise
Reference graph
Works this paper leans on
-
[1]
Bulletin of Engineering Geology and the Environment doi:10.1007/s10064-021-02306-2
Identification of potential rockfall sources using uav-derived point cloud. Bulletin of Engineering Geology and the Environment doi:10.1007/s10064-021-02306-2. ASPRS,
-
[2]
IEEE Transactions on Pattern Analysis and Machine Intelligence 14, 239–256
A method for registration of 3-d shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence 14, 239–256. doi:10.1109/34.121791. Chen, B., Maurer, J., Gong, W., 2025a. Applications of uav in landslide research: a review. Landslides 22, 3029–3048. doi:10.1007/ s10346-025-02547-2. Chen,J.,Xie,C.,Zhang,W.,Fu,C.,Shen,J.,Yang,B.,Li,H.,Shi,D.,2025b. ...
-
[3]
Choi, S.K., Ramirez, R.A., Kwon, T.H.,
doi:10.3390/su17094176. Choi, S.K., Ramirez, R.A., Kwon, T.H.,
-
[4]
Acquisition of high-resolution topographic information in forest environments using integrated uav-lidar system: System development and field demonstration. Heliyon 9, e20225. doi:10.1016/j.heliyon.2023.e20225. Deng, K., Yang, B., Yu, Z., Pu, Q., He, L.,
-
[5]
Frontiers in Earth Science 13, 1715960
Automatic extraction algorithm for landslide cracks using insar-uav lidar point cloud coupling. Frontiers in Earth Science 13, 1715960. doi:10.3389/feart.2025.1715960. DJI,
-
[6]
Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM 24, 381–395. doi:10.1145/358669.358692. Froude,M.J.,Petley,D.N.,2018. Globalfatallandslideoccurrencefrom2004to2016. NaturalHazardsandEarthSystemSciences18,2161–2181. doi:10.5194/nhess-18-2161-2018. Galve, J.P., Per...
-
[7]
doi:10.1007/s10346-024-02449-9
Applications of uav digital photogrammetryinlandslideemergencyresponseandrecoveryactivities:Thecasestudyofaslopefailureinthea-7highway(sspain).Landslides 22, 1383–1396. doi:10.1007/s10346-024-02449-9. Hu, Q., Yang, B., Xie, L., Rosa, S., Guo, Y., Wang, Z., Trigoni, N., Markham, A.,
-
[8]
Randla-net: Efficient semantic segmentation of large- scale point clouds, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 11108–11117. URL: https://arxiv.org/abs/1911.11236. Jiang, P., Ma, Z., Mei, G.,
arXiv 1911
-
[9]
Natural Hazards and Earth System Sciences 26, 487–529
Review article: Deep learning for potential landslide identification: data, models, applications, challenges, and opportunities. Natural Hazards and Earth System Sciences 26, 487–529. doi:10.5194/nhess-26-487-2026. Lague, D., Brodu, N., Leroux, J.,
-
[10]
ISPRS Journal of Photogrammetry and Remote Sensing 82, 10–26
Accurate 3d comparison of complex topography with terrestrial laser scanner: Application to the rangitikei canyon (n-z). ISPRS Journal of Photogrammetry and Remote Sensing 82, 10–26. doi:10.1016/j.isprsjprs.2013.04.009. Liu, K., Wang, Q., Wang, M., Koks, E.E.,
-
[11]
doi:10.1038/s41467-023-38203-3. Ma, Z., Mei, G.,
-
[12]
Earth-Science Reviews 223, 103858
Deep learning for geological hazards analysis: Data, models, applications, and opportunities. Earth-Science Reviews 223, 103858. doi:10.1016/j.earscirev.2021.103858. Qi, C.R., Su, H., Mo, K., Guibas, L.J., 2017a. Pointnet: Deep learning on point sets for 3d classification and segmentation, in: Proceedings of the IEEE Conference on Computer Vision and Patt...
-
[13]
Engineering Geology 346, 107890
A novel method for landslide deformation monitoring by fusing uav photogrammetry and lidar data based on each sensor’s mapping advantage in regards to terrain feature. Engineering Geology 346, 107890. doi:10.1016/j.enggeo.2024.107890. Sun, J., Yuan, G., Song, L., Zhang, H.,
-
[14]
Wheaton, J.M., Brasington, J., Darby, S.E., Sear, D.A.,
doi:10.3390/drones8010030. Wheaton, J.M., Brasington, J., Darby, S.E., Sear, D.A.,
-
[15]
Earth Surface Processes and Landforms 35, 136–156
Accounting for uncertainty in dems from repeat topographic surveys: improved sediment budgets. Earth Surface Processes and Landforms 35, 136–156. doi:10.1002/esp.1886. Wu,G.,etal.,2025. Failuremechanismsandmitigationstrategiesofhighwaysubgradestructuresunderrainwatererosionconditions. CaseStudies in Construction Materials , e05045doi:10.1016/j.cscm.2025.e...
-
[16]
doi:10.1007/978-981-97-6238-5_43. Zai, D., Liu, J.,
-
[17]
Geotechnical and Geological Engineering doi:10.1007/s10706-025-03228-6
3d slope reconstruction and point cloud analysis using uav multi-source data. Geotechnical and Geological Engineering doi:10.1007/s10706-025-03228-6. Zhang, J., Zhang, S., Ding, Y., et al.,
-
[18]
Zhang,W.,Qi,J.,Wan,P.,Wang,H.,Xie,D.,Wang,X.,Yan,G.,2016
doi:10.1038/s41598-023-32055-z. Zhang,W.,Qi,J.,Wan,P.,Wang,H.,Xie,D.,Wang,X.,Yan,G.,2016. Aneasy-to-useairbornelidardatafilteringmethodbasedonclothsimulation. Remote Sensing 8,
- [19]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.