The Evaluation Cost of Task Specialization in Evolutionary Multi-Robot Systems
Pith reviewed 2026-06-26 00:37 UTC · model grok-4.3
The pith
As multi-robot teams grow larger, specialists can be evolved to outperform generalists using a smaller total evaluation budget.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
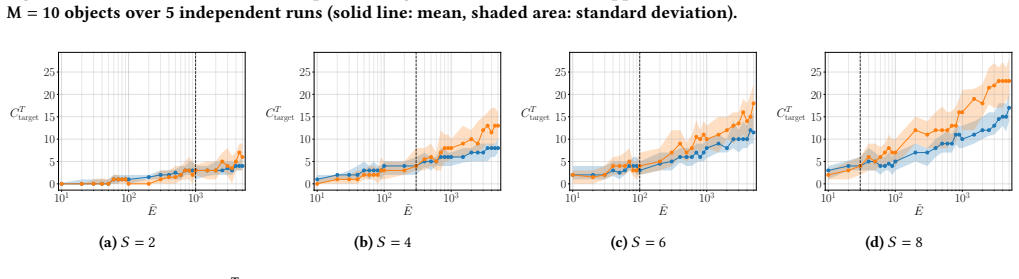
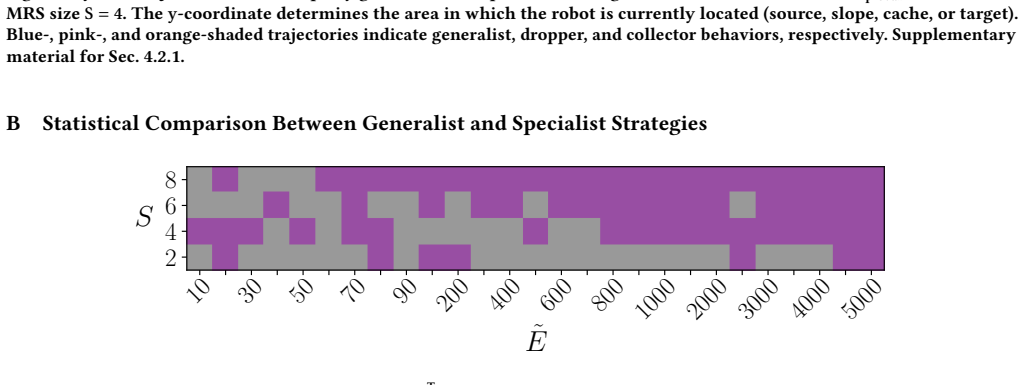
In a physics-based robotics simulator, task-specialist behaviors outperform generalist behaviors when the total evaluation budget is distributed across subtasks, and this advantage for specialists emerges at lower budgets as the multi-robot system size increases.
What carries the argument
The total evaluation budget allocated across subtask-specific optimizations for specialists versus concentrated on a single generalist optimization, measured by the budget at which specialists first exceed generalist performance.
If this is right
- For any fixed evaluation budget, sufficiently large teams can reach higher foraging performance by evolving specialists rather than generalists.
- Task decomposition into subtasks becomes cheaper to exploit as the number of robots increases.
- The relative advantage of specialization is not fixed but grows with team size under constant total evaluation resources.
Where Pith is reading between the lines
- If the simulator-to-hardware gap is small, real deployments of large robot teams could adopt specialized controllers without increasing the overall tuning cost.
- The same budget-scaling pattern might appear in other evolutionary domains where a composite task can be split into independent subtasks.
- Changing how subtasks are defined or how the foraging environment varies could shift the team-size threshold at which specialists become cheaper.
Load-bearing premise
Performance differences measured inside the physics-based simulator and the chosen evolutionary algorithm would translate directly to the relative evaluation costs required on physical robot hardware.
What would settle it
Repeating the evolutionary runs on physical robots and finding that the budget needed for specialists to beat generalists does not decrease with larger team sizes would falsify the central claim.
Figures
read the original abstract
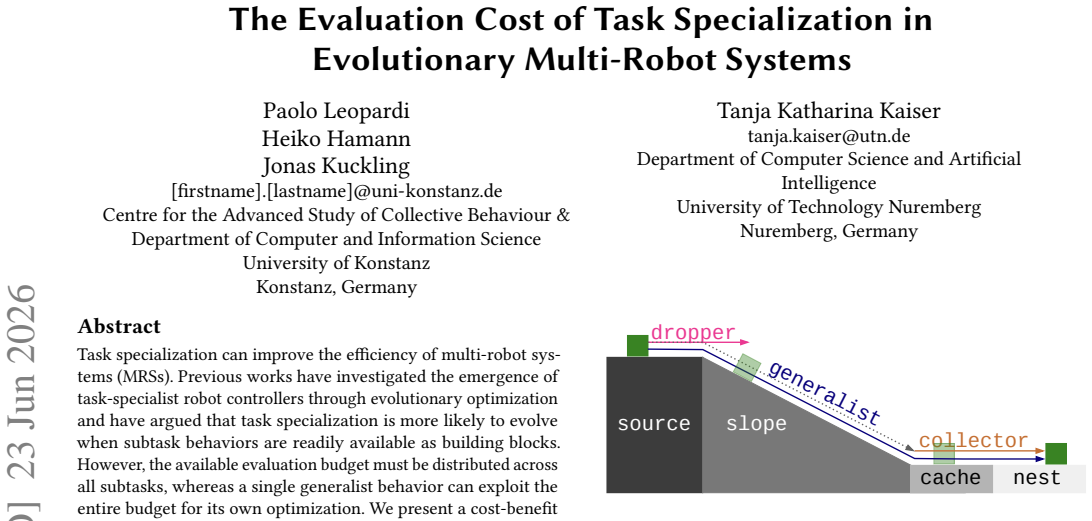
Task specialization can improve the efficiency of multi-robot systems (MRSs). Previous works have investigated the emergence of task-specialist robot controllers through evolutionary optimization and have argued that task specialization is more likely to evolve when subtask behaviors are readily available as building blocks. However, the available evaluation budget must be distributed across all subtasks, whereas a single generalist behavior can exploit the entire budget for its own optimization. We present a cost-benefit analysis of evolving task-specialist versus generalist behaviors in a foraging scenario here. In a physics-based robotics simulator, we study the total evaluation budget required to evolve task-specialist behaviors that outperform generalist behaviors across MRS sizes. We show that with increasing MRS size, a lower total evaluation budget is sufficient to evolve specialists that outperform generalists.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that in a physics-based simulation of a foraging task, the total evaluation budget at which evolved task-specialist controllers first outperform generalist controllers decreases as multi-robot system (MRS) size increases, because the budget is split across subtasks for specialists while generalists receive the full budget.
Significance. If the reported trend is robust, the result supplies a concrete empirical cost-benefit comparison between specialization and generalization under fixed budget-splitting rules, which could inform the design of evolutionary experiments for larger MRS by quantifying when specialization becomes evaluation-efficient.
major comments (2)
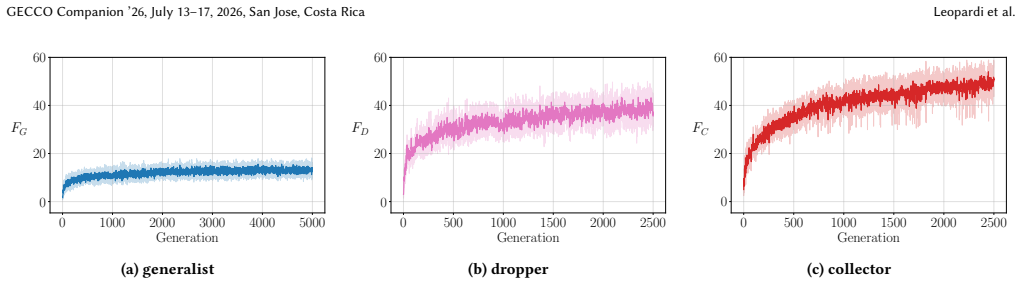
- [Abstract and Results] The manuscript does not report the number of independent evolutionary runs, the statistical tests used to identify crossover points, or error bars on the performance curves for different MRS sizes; without these, the central claim that specialists require progressively lower total budgets cannot be evaluated for reliability.
- [Methods] The exact evolutionary parameters (population size, selection method, mutation rates, number of generations per budget level) and the precise definition of 'performance' (e.g., items collected per robot or team total) are not stated, making it impossible to reproduce or assess whether the observed trend depends on these choices.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting omissions that affect reproducibility and the ability to assess the reliability of our central claim. We address each major comment below and will revise the manuscript to incorporate the requested details.
read point-by-point responses
-
Referee: [Abstract and Results] The manuscript does not report the number of independent evolutionary runs, the statistical tests used to identify crossover points, or error bars on the performance curves for different MRS sizes; without these, the central claim that specialists require progressively lower total budgets cannot be evaluated for reliability.
Authors: We agree that these elements are essential for evaluating the reliability of the reported trend. The current manuscript does not include them. In the revised version we will explicitly state the number of independent evolutionary runs, describe the statistical tests used to identify crossover points, and add error bars (with appropriate shading) to the performance curves across MRS sizes. revision: yes
-
Referee: [Methods] The exact evolutionary parameters (population size, selection method, mutation rates, number of generations per budget level) and the precise definition of 'performance' (e.g., items collected per robot or team total) are not stated, making it impossible to reproduce or assess whether the observed trend depends on these choices.
Authors: We agree that these parameters and the performance metric must be stated explicitly for reproducibility. The current manuscript does not provide them at the required level of detail. In the revised Methods section we will supply the exact evolutionary parameters (population size, selection method, mutation rates, generations per budget level) and clarify the definition of performance. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper reports an empirical simulation study in a foraging task: it directly measures the total evaluation budget at which specialist controllers first outperform generalists as MRS size increases, with subtask budgets summing to the total for specialists and the full budget allocated to generalists. No equations, parameter fits, or derivations are described; the trend is an observed outcome of controlled simulator runs. No self-citation chain, uniqueness theorem, or ansatz is invoked to justify the central result, so the claim does not reduce to its inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Albrecht, Filippos Christianos, and Lukas Schäfer
Stefano V. Albrecht, Filippos Christianos, and Lukas Schäfer. 2024.Multi-agent reinforcement learning: Foundations and modern approaches. MIT Press
2024
-
[2]
Tucker Balch. 2002. Taxonomies of multirobot task and reward.Robot teams: From diversity to polymorphism(2002), 23–35
2002
-
[3]
Michael Bonani, Valentin Longchamp, Stéphane Magnenat, Philippe Rétornaz, Daniel Burnier, Gilles Roulet, Florian Vaussard, Hannes Bleuler, and Francesco Mondada. 2010. The marXbot, a miniature mobile robot opening new perspectives for the collective-robotic research. In2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 4187–4193
2010
-
[4]
Josh C. Bongard. 2013. Evolutionary robotics.Commun. ACM56, 8 (2013), 74–83
2013
-
[5]
Arne Brutschy, Giovanni Pini, Carlo Pinciroli, Mauro Birattari, and Marco Dorigo
-
[6]
Self-organized task allocation to sequentially interdependent tasks in swarm robotics.Autonomous agents and multi-agent systems28, 1 (2014), 101–125
2014
-
[7]
Stephane Doncieux, Nicolas Bredeche, Jean-Baptiste Mouret, and Agoston E. (Gusz) Eiben. 2015. Evolutionary Robotics: What, Why, and Where to.Frontiers in Robotics and AIVolume 2 (2015). doi:10.3389/frobt.2015.00004
-
[8]
Eiben and James E
Agoston E. Eiben and James E. Smith. 2015.Introduction to evolutionary computing. Springer
2015
-
[9]
Eliseo Ferrante, Ali Emre Turgut, Edgar Duéñez-Guzmán, Marco Dorigo, and Tom Wenseleers. 2015. Evolution of Self-Organized Task Specialization in Robot Swarms.PLOS Computational Biology11, 8 (08 2015), 1–21
2015
-
[10]
Adam G Hart, Carl Anderson, and Francis L Ratnieks. 2002. Task partitioning in leafcutting ants.Acta ethologica5, 1 (2002), 1–11
2002
-
[11]
Sture Holm. 1979. A simple sequentially rejective multiple test procedure.Scan- dinavian journal of statistics(1979), 65–70
1979
-
[12]
Kristina Lerman and Aram Galstyan. 2002. Mathematical model of foraging in a group of robots: Effect of interference.Autonomous robots13, 2 (2002), 127–141
2002
-
[13]
Henry B Mann and Donald R Whitney. 1947. On a test of whether one of two random variables is stochastically larger than the other.The annals of mathematical statistics(1947), 50–60
1947
-
[14]
Jean-Marc Montanier, Simon Carrignon, and Nicolas Bredeche. 2016. Behavioral specialization in embodied evolutionary robotics: Why so difficult?Frontiers in Robotics and AI3 (2016), 38
2016
-
[15]
Andrew L Nelson, Gregory J Barlow, and Lefteris Doitsidis. 2009. Fitness functions in evolutionary robotics: A survey and analysis.Robotics and Autonomous Systems 57, 4 (2009), 345–370
2009
-
[16]
2000.Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines
Stefano Nolfi and Dario Floreano. 2000.Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines. MIT Press
2000
-
[17]
Carlo Pinciroli, Vito Trianni, Rehan O’Grady, Giovanni Pini, Arne Brutschy, Manuele Brambilla, et al. 2012. ARGoS: a modular, parallel, multi-engine simulator for multi-robot systems.Swarm intelligence6 (2012), 271–295. doi:10.1007/s11721- 012-0072-5
-
[18]
Giovanni Pini, Arne Brutschy, Alexander Scheidler, Marco Dorigo, and Mauro Birattari. 2014. Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer.Artificial Life20, 3 (07 2014), 291–317. doi:10.1162/ARTL_a_00132
-
[19]
Röschard and F
J. Röschard and F. Roces. 2003. Cutters, carriers and transport chains: distance- dependent foraging strategies in the grass-cutting ant Atta vollenweideri.Insectes sociaux50, 3 (2003), 237–244
2003
-
[20]
2008.Evolutionary Swarm Robotics - Evolving Self-Organising Be- haviours in Groups of Autonomous Robots
Vito Trianni. 2008.Evolutionary Swarm Robotics - Evolving Self-Organising Be- haviours in Groups of Autonomous Robots. Studies in Computational Intelligence, Vol. 108. Springer, Berlin, Germany
2008
-
[21]
Fuda van Diggelen, Matteo De Carlo, Nicolas Cambier, Eliseo Ferrante, and Guszti Eiben. 2024. Emergence of specialised collective behaviors in evolving heterogeneous swarms. InInternational Conference on Parallel Problem Solving from Nature (PPSN). Springer, 53–69. The Evaluation Cost of Task Specialization in Evolutionary Multi-Robot Systems GECCO Compan...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.