Decentralized Pose Graph Riemannian Optimization for Object-based Multi-Robot SLAM
Pith reviewed 2026-06-26 00:01 UTC · model grok-4.3
The pith
Consensus mechanism decouples joint trajectory and object pose estimation in multi-robot SLAM.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that object-based multi-robot pose graph optimization can be made fully decentralized by decoupling the coupled estimation problem through a consensus mechanism on the SE(d) manifold. This enables operation over arbitrary communication topologies, and a distributed approximate-Newton scheme achieves faster convergence to Riemannian first-order stationary points with lower communication cost, as shown by local condition-number analysis, without loss of accuracy.
What carries the argument
The consensus mechanism that decouples the joint estimation of robot trajectories and persistent object poses, combined with the distributed approximate-Newton scheme on the SE(d) manifold.
If this is right
- The method works for any sparse, intermittent, or time-varying communication graphs.
- It reduces the number of iterations and the amount of data exchanged between robots.
- Convergence is guaranteed to first-order stationary points on the manifold.
- Accuracy remains comparable to centralized solutions on benchmarks and real experiments.
Where Pith is reading between the lines
- If the decoupling holds, teams could maintain consistent maps in settings where radio links are unreliable or blocked.
- The local condition-number analysis points to possible further speedups by incorporating more curvature information locally.
- Extensions might combine this with online object discovery rather than assuming persistent known objects.
Load-bearing premise
The consensus mechanism succeeds in decoupling the estimation even when the communication network is arbitrary and does not match the observation pattern.
What would settle it
Running the algorithm on a multi-robot dataset with highly disconnected or failing communication links and observing that the estimates diverge or have large errors compared to a centralized solver would disprove the decoupling claim.
Figures




read the original abstract
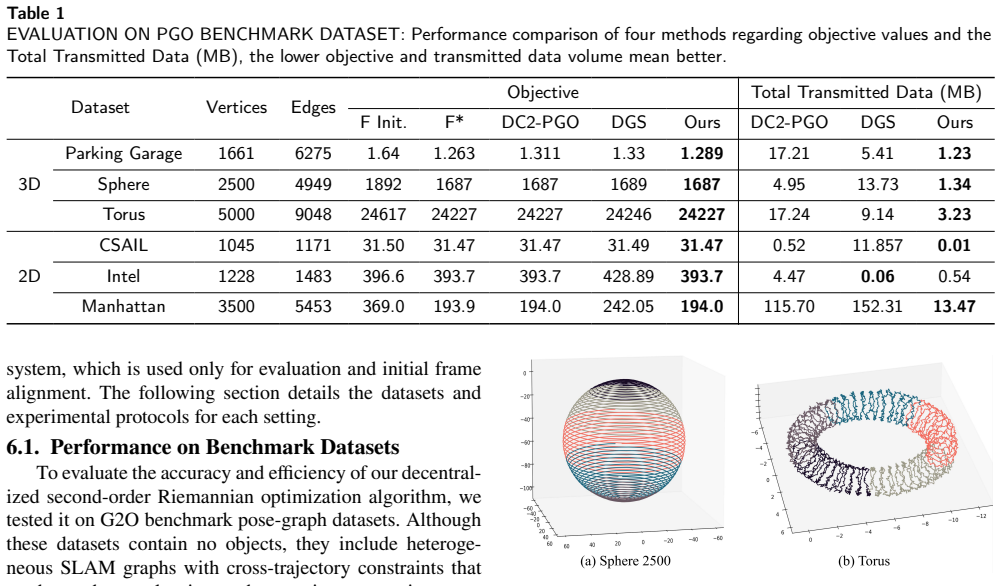
Pose graph optimization (PGO) is a key back-end component for state estimation in networked multi-robot simultaneous localization and mapping (SLAM). In object-based multi-robot SLAM, the problem becomes more tightly coupled because robots must jointly estimate both their trajectories and the poses of persistent objects observed by multiple agents. Existing decentralized solutions often assume that the communication graph closely matches the physical interaction topology, which is restrictive in realistic deployments where communication is sparse, intermittent, or time-varying. This paper presents a fully decentralized Riemannian optimization framework for object-based multi-robot PGO that decouples the coupled estimation problem via a consensus mechanism, enabling flexible communication topologies. To improve convergence under limited communication budgets, we further develop a distributed approximate-Newton scheme that exploits local second-order information while operating directly on the SE(d) manifold to preserve geometric consistency, and we establish the convergence to Riemannian first-order stationary points and provide a local condition-number analysis explaining the benefit of approximate second-order information over first-order Riemannian descent. The resulting method reduces iteration count and communication overhead without sacrificing estimation accuracy. Extensive evaluations on public benchmarks, large-scale simulations, and real-world multi-robot experiments demonstrate improved accuracy, runtime efficiency, scalability across network topologies, and robustness to communication failures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a fully decentralized Riemannian optimization framework for object-based multi-robot pose graph optimization (PGO) in SLAM. It decouples the joint estimation of robot trajectories and persistent object poses via a consensus mechanism that supports sparse, intermittent, or time-varying communication topologies (unlike prior methods that require communication graphs to match physical interaction topologies). A distributed approximate-Newton scheme is developed that operates directly on the SE(d) manifold, with stated convergence to Riemannian first-order stationary points and a local condition-number analysis showing benefits over first-order Riemannian descent. The method is claimed to reduce iteration count and communication overhead without loss of accuracy. Extensive evaluations are reported on public benchmarks, large-scale simulations, and real-world multi-robot experiments demonstrating gains in accuracy, runtime, scalability, and robustness to communication failures.
Significance. If the decoupling and convergence claims hold, the work would meaningfully advance decentralized multi-robot SLAM by relaxing restrictive topology assumptions common in the literature, enabling more realistic deployments. The Riemannian formulation preserves manifold geometry, the approximate-Newton approach targets communication efficiency, and the combination of public benchmarks, simulations, and real experiments provides a solid empirical foundation. These elements (distributed second-order information on SE(d) plus explicit convergence analysis) are strengths that differentiate it from first-order decentralized baselines.
major comments (2)
- [Consensus mechanism and decoupling section] The central claim that the consensus mechanism decouples the coupled trajectory-object estimation problem for arbitrary (sparse, intermittent, time-varying) communication topologies is load-bearing; the manuscript must contain an explicit statement (likely a theorem or proposition) establishing that the local subproblems remain consistent with the global optimum under the stated communication model, including any minimum connectivity or dwell-time assumptions.
- [Distributed approximate-Newton scheme and analysis] The local condition-number analysis is invoked to explain why the distributed approximate-Newton scheme reduces iteration count relative to first-order Riemannian descent; this analysis must be stated with the precise local Hessian approximation used and the resulting bound on the condition number (or equivalent contraction factor) so that the claimed benefit can be verified.
minor comments (2)
- [Notation and problem formulation] Clarify the precise definition of the consensus variables and the update rule for object poses shared across robots; notation for the SE(d) retraction and the approximate Hessian should be introduced once and used consistently.
- [Evaluations] The experimental section should include an explicit statement of data exclusion criteria, number of Monte Carlo runs, and statistical significance tests for the reported accuracy and runtime improvements.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address the two major comments point by point below and will revise the manuscript accordingly to strengthen the formal statements.
read point-by-point responses
-
Referee: [Consensus mechanism and decoupling section] The central claim that the consensus mechanism decouples the coupled trajectory-object estimation problem for arbitrary (sparse, intermittent, time-varying) communication topologies is load-bearing; the manuscript must contain an explicit statement (likely a theorem or proposition) establishing that the local subproblems remain consistent with the global optimum under the stated communication model, including any minimum connectivity or dwell-time assumptions.
Authors: We agree that an explicit formal statement is required to substantiate the decoupling claim under general communication topologies. The manuscript describes the consensus updates and their role in decoupling trajectory and object variables but does not isolate this property as a dedicated proposition. In the revised version we will insert Proposition 1 in Section III, which states that, under the assumption of T-periodic joint connectivity with minimum dwell time tau > 0, the distributed consensus iterates converge to the same fixed point as the centralized joint PGO problem. The proof will rely on a Lyapunov function defined on the product of SE(d) manifolds and standard results on time-varying consensus. revision: yes
-
Referee: [Distributed approximate-Newton scheme and analysis] The local condition-number analysis is invoked to explain why the distributed approximate-Newton scheme reduces iteration count relative to first-order Riemannian descent; this analysis must be stated with the precise local Hessian approximation used and the resulting bound on the condition number (or equivalent contraction factor) so that the claimed benefit can be verified.
Authors: We concur that the local condition-number argument must be stated with explicit definitions. Section IV-C currently invokes a block-diagonal Hessian approximation without writing the precise expression or the resulting bound. In the revision we will replace the paragraph with the following: the local Hessian approximation is H_i = sum_{j in N_i} (H_{ij} + lambda I), where H_{ij} are the second derivatives of the pairwise factors; under the local strong-convexity assumption with modulus mu and Lipschitz constant L we obtain the condition-number bound kappa <= (L + lambda)/(mu + lambda) <= kappa_first-order * (1 - c alpha), where alpha is the consensus gain. This explicit contraction factor will be used to explain the observed reduction in iteration count. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper's central claims rest on a consensus-based decoupling of the joint estimation problem followed by a distributed approximate-Newton scheme on the SE(d) manifold, with stated convergence to first-order stationary points and a local condition-number analysis. These steps invoke standard Riemannian optimization techniques and consensus mechanisms whose validity is independent of the target result; no equation reduces by construction to a fitted parameter, self-citation chain, or renamed input. The abstract and provided framing contain no self-definitional steps, fitted-input predictions, or load-bearing self-citations that would force the claimed benefits.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Optimization algo- rithms on matrix manifolds, in: Optimization Algorithms on Matrix Manifolds
Absil, P.A., Mahony, R., Sepulchre, R., 2009. Optimization algo- rithms on matrix manifolds, in: Optimization Algorithms on Matrix Manifolds. Princeton University Press
2009
-
[2]
Cartan-sync: Fast and global se(d)-synchronization
Briales, J., Gonzalez-Jimenez, J., 2017. Cartan-sync: Fast and global se(d)-synchronization. IEEE Robotics and Automation Letters 2, 2127–2134. doi:10.1109/LRA.2017.2718661
-
[3]
Initialization techniquesfor3dslam:Asurveyonrotationestimationanditsusein pose graph optimization, in: 2015 IEEE international conference on robotics and automation (ICRA), IEEE
Carlone, L., Tron, R., Daniilidis, K., Dellaert, F., 2015. Initialization techniquesfor3dslam:Asurveyonrotationestimationanditsusein pose graph optimization, in: 2015 IEEE international conference on robotics and automation (ICRA), IEEE. pp. 4597–4604
2015
-
[4]
Choudhary, S., Carlone, L., Christensen, H.I., Dellaert, F., 2015. Exactly sparse memory efficient slam using the multi-block alternat- ing direction method of multipliers, in: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1349–
2015
-
[5]
doi:10.1109/IROS.2015.7353543
-
[6]
Distributed mapping with privacy and communi- cation constraints: Lightweight algorithms and object-based models
Choudhary, S., Carlone, L., Nieto, C., Rogers, J., Christensen, H.I., Dellaert, F., 2017. Distributed mapping with privacy and communi- cation constraints: Lightweight algorithms and object-based models. The International Journal of Robotics Research 36, 1286–1311
2017
-
[7]
GeoD:Consensus- basedGeodesicDistributedPoseGraphOptimization
Cristofalo,E.,Montijano,E.,Schwager,M.,2020. GeoD:Consensus- basedGeodesicDistributedPoseGraphOptimization. arXive-prints , arXiv:2010.00156arXiv:2010.00156
-
[8]
Cunningham, A., Indelman, V., Dellaert, F., 2013. Ddf-sam 2.0: Consistent distributed smoothing and mapping, in: 2013 IEEE In- ternationalConferenceonRoboticsandAutomation,pp.5220–5227. doi:10.1109/ICRA.2013.6631323
-
[9]
Dellaert, F., Contributors, G., 2022. borglab/gtsam. URL:https: //github.com/borglab/gtsam), doi:10.5281/zenodo.5794541
-
[10]
Numericalmethods foruncon- strained optimization and nonlinear equations
DennisJr,J.E., Schnabel,R.B.,1996. Numericalmethods foruncon- strained optimization and nonlinear equations. SIAM
1996
-
[11]
Aconsensus- based framework for distributed bundle adjustment, in: Proceedings oftheIEEEConferenceonComputerVisionandPatternRecognition, pp
Eriksson,A.,Bastian,J.,Chin,T.J.,Isaksson,M.,2016. Aconsensus- based framework for distributed bundle adjustment, in: Proceedings oftheIEEEConferenceonComputerVisionandPatternRecognition, pp. 1754–1762
2016
-
[12]
IEEE Transactions on Robotics 40, 22–42
Fan,T.,Murphey,T.D.,2024.Majorizationminimizationmethodsfor distributed pose graph optimization. IEEE Transactions on Robotics 40, 22–42. doi:10.1109/TRO.2023.3324818
-
[13]
IEEE Signal Processing Magazine , author =
Gálvez-López, D., Tardós, J.D., 2012. Bags of binary words for fast placerecognitioninimagesequences. IEEETransactionsonRobotics 28, 1188–1197. doi:10.1109/TRO.2012.2197158
-
[14]
A survey of distributed optimization methods for multi-robot systems
Halsted, T., Shorinwa, O., Yu, J., Schwager, M., 2021. A survey of distributed optimization methods for multi-robot systems. arXiv preprint arXiv:2103.12840
-
[15]
Collaborative localization with heterogeneous inter-robot measurements by riemannian opti- mization, in: 2013 IEEE International Conference on Robotics and Automation, IEEE
Knuth, Joseph and Barooah, Prabir, 2013. Collaborative localization with heterogeneous inter-robot measurements by riemannian opti- mization, in: 2013 IEEE International Conference on Robotics and Automation, IEEE. pp. 1534–1539
2013
-
[16]
Kümmerle, R., Grisetti, G., Strasdat, H., Konolige, K., Burgard, W.,
-
[17]
G2o: A general framework for graph optimization, in: 2011 IEEE International Conference on Robotics and Automation, pp. 3607–3613. doi:10.1109/ICRA.2011.5979949
-
[18]
Edge-assisted multi-robot visual-inertial slam with efficient communication
Liu, X., Wen, S., Zhao, J., Qiu, T.Z., Zhang, H., 2025. Edge-assisted multi-robot visual-inertial slam with efficient communication. IEEE TransactionsonAutomationScienceandEngineering22,2186–2198. doi:10.1109/TASE.2024.3376427
-
[19]
Asynchronousdistributed smoothingandmappingviaon-manifoldconsensusADMM,in:Proc
McGann,D.,Lassak,K.,Kaess,M.,2024. Asynchronousdistributed smoothingandmappingviaon-manifoldconsensusADMM,in:Proc. IEEEIntl.Conf.onRoboticsandAutomation(ICRA),Yokohama,JP. pp. 4577–4583
2024
-
[20]
Relative transformation estimation based on fusion of odometry and uwb ranging data
Nguyen, T.H., Xie, L., 2022. Relative transformation estimation based on fusion of odometry and uwb ranging data. arXiv preprint arXiv:2202.00279
-
[21]
Numerical optimization
Nocedal, J., Wright, S.J., 2006. Numerical optimization. Springer
2006
-
[22]
Ott, F., Heublein, L., Rügamer, D., Bischl, B., Mutschler, C., 2023. Fusingstructurefrommotionandsimulation-augmentedposeregres- sion from optical flow for challenging indoor environments. arXiv preprint arXiv:2304.07250
-
[23]
Vins-mono: A robust and versatile monocular visual-inertial state estimator
Qin, T., Li, P., Shen, S., 2018. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Transactions on Robotics 34, 1004–1020. doi:10.1109/TRO.2018.2853729
-
[24]
SE- Sync: A certifiably correct algorithm for synchronization over the special euclidean group
Rosen, D.M., Carlone, L., Bandeira, A.S., Leonard, J.J., 2019. SE- Sync: A certifiably correct algorithm for synchronization over the special euclidean group. The International Journal of Robotics Research 38, 95–125
2019
-
[25]
Covins: Visual-inertial slam for centralized collaboration, in: 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), IEEE
Schmuck, P., Ziegler, T., Karrer, M., Perraudin, J., Chli, M., 2021. Covins: Visual-inertial slam for centralized collaboration, in: 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), IEEE. pp. 171–176
2021
-
[26]
Distributed riemannian optimization with lazy communication for collaborative geometric estimation
Tian, Y., Bedi, A.S., Koppel, A., Calvo-Fullana, M., Rosen, D.M., How, J.P., 2022. Distributed riemannian optimization with lazy communication for collaborative geometric estimation. ArXiv abs/2203.00851
-
[27]
Kimera-multi: Robust, distributed, dense metric-semantic SLAMformulti-robotsystems
Tian,Y.,Chang,Y.,Arias,F.H.,Nieto-Granda,C.,How,J.P.,Carlone, L., 2021a. Kimera-multi: Robust, distributed, dense metric-semantic SLAMformulti-robotsystems. CoRRabs/2106.14386. URL:https: //arxiv.org/abs/2106.14386,arXiv:2106.14386
-
[28]
Distributed certifiably correct pose-graph optimization
Tian, Y., Khosoussi, K., Rosen, D.M., How, J.P., 2021b. Distributed certifiably correct pose-graph optimization. IEEE Transactions on Robotics 37, 2137–2156
-
[29]
Asynchronous and parallel distributed pose graph optimization
Tian, Y., Koppel, A., Bedi, A.S., How, J.P., 2020. Asynchronous and parallel distributed pose graph optimization. IEEE Robotics and Automation Letters 5, 5819–5826. doi:10.1109/LRA.2020.3010216
-
[30]
Distributed 3-d localization of camera sensor networks from 2-d image measurements
Tron, R., Vidal, R., 2014. Distributed 3-d localization of camera sensor networks from 2-d image measurements. IEEE Transactions on Automatic Control 59, 3325–3340
2014
-
[31]
Riemannian consensus for manifolds with bounded curvature
Tron, Roberto and Afsari, Bijan and Vidal, René, 2012. Riemannian consensus for manifolds with bounded curvature. IEEE Transactions on Automatic Control 58, 921–934
2012
-
[32]
arXiv preprint arXiv:2209.15428
Wang,C.,Gao,D.,Xu,K.,Geng,J.,Hu,Y.,Qiu,Y.,Li,B.,Yang,F., Moon,B.,Pandey,A.,etal.,2022.Pypose:Alibraryforrobotlearning with physics-based optimization. arXiv preprint arXiv:2209.15428
-
[33]
On the o (1= k) convergence of asyn- chronous distributed alternating direction method of multipliers, in: 2013IEEEGlobalConferenceonSignalandInformationProcessing, IEEE
Wei, E., Ozdaglar, A., 2013. On the o (1= k) convergence of asyn- chronous distributed alternating direction method of multipliers, in: 2013IEEEGlobalConferenceonSignalandInformationProcessing, IEEE. pp. 551–554
2013
-
[34]
Multicorebundle adjustment, in: CVPR 2011, IEEE
Wu,C.,Agarwal,S.,Curless,B.,Seitz,S.M.,2011. Multicorebundle adjustment, in: CVPR 2011, IEEE. pp. 3057–3064
2011
-
[35]
Xiao, L., Boyd, S., 2003. Fast linear iterations for distributed averaging, in: 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), pp. 4997–5002 Vol.5. doi:10. 1109/CDC.2003.1272421
-
[36]
Xu,Y.,Zheng,R.,Zhang,S.,Liu,M.,Yu,J.,2025. Uncertainty-aware autonomous robot exploration using confidence-rich localization and mapping.IEEETransactionsonAutomationScienceandEngineering 22, 1124–1138. doi:10.1109/TASE.2024.3360442
-
[37]
A newton tracking algorithm with exact linear convergence for decentralized consensus optimiza- tion
Zhang, J., Ling, Q., So, A.M.C., 2021. A newton tracking algorithm with exact linear convergence for decentralized consensus optimiza- tion. IEEE Transactions on Signal and Information Processing over Networks 7, 346–358. doi:10.1109/TSIPN.2021.3083975
-
[38]
Distributed very large scalebundleadjustmentbyglobalcameraconsensus,in:Proceedings oftheIEEEInternationalConferenceonComputerVision,pp.29–38
Zhang, R., Zhu, S., Fang, T., Quan, L., 2017. Distributed very large scalebundleadjustmentbyglobalcameraconsensus,in:Proceedings oftheIEEEInternationalConferenceonComputerVision,pp.29–38
2017
-
[39]
Zhou,X.,Zhu,J.,Zhou,H.,Xu,C.,Gao,F.,2021.Ego-swarm:Afully autonomous and decentralized quadrotor swarm system in cluttered environments, in: 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 4101–4107. doi:10.1109/ICRA48506. 2021.9561902
-
[40]
Distributed formation estimation via pairwise distance measurements
Ziegler, T., Karrer, M., Schmuck, P., Chli, M., 2021. Distributed formation estimation via pairwise distance measurements. IEEE Robotics and Automation Letters 6, 3017–3024. A. Proofs for the Convergence Analysis This appendix collects the detailed proofs omitted from Section 5. A.1. Proof of Lemma 1 (Positive definiteness of the LM approximation) For any...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.