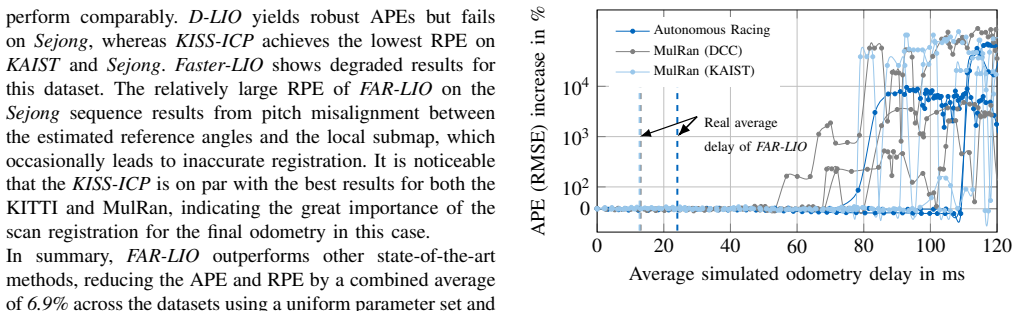
FAR-LIO: Enabling High-Speed Autonomy through Fast, Accurate, and Robust LiDAR-Inertial Odometry
Pith reviewed 2026-06-25 19:43 UTC · model grok-4.3
The pith
FAR-LIO cuts positional error by 6.9% and runtime by 38.4% in high-speed LiDAR-inertial odometry with one parameter set across sensor setups.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
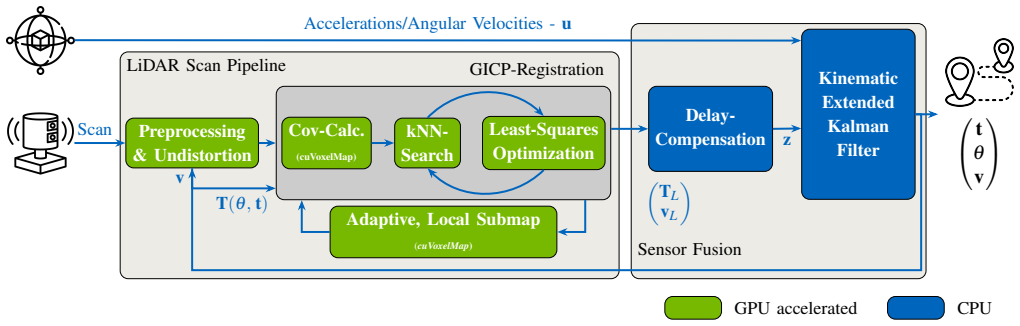
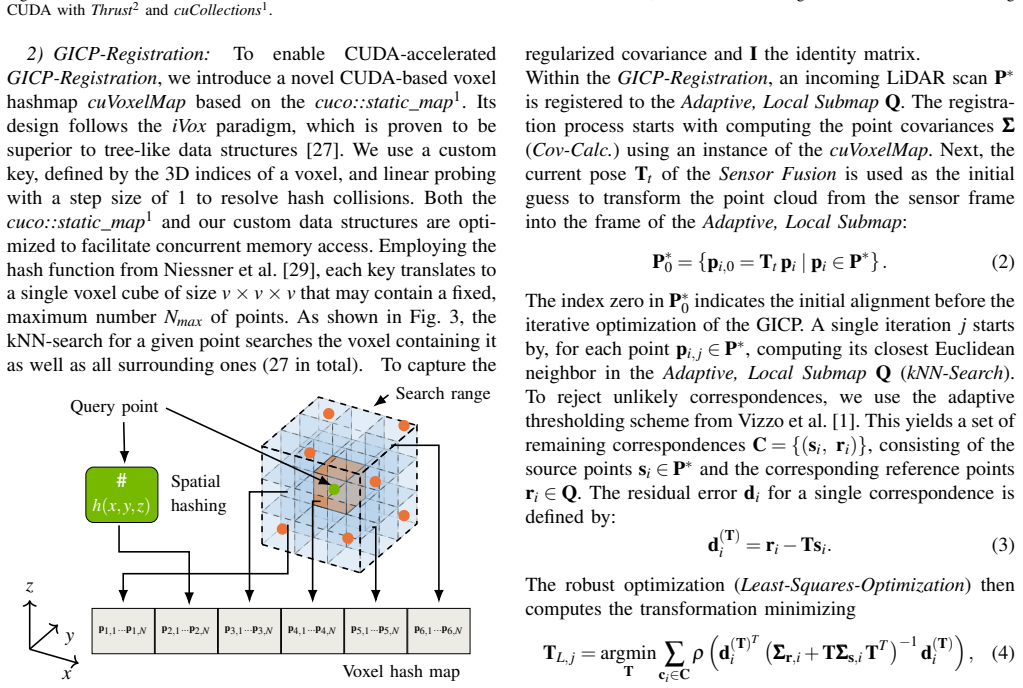
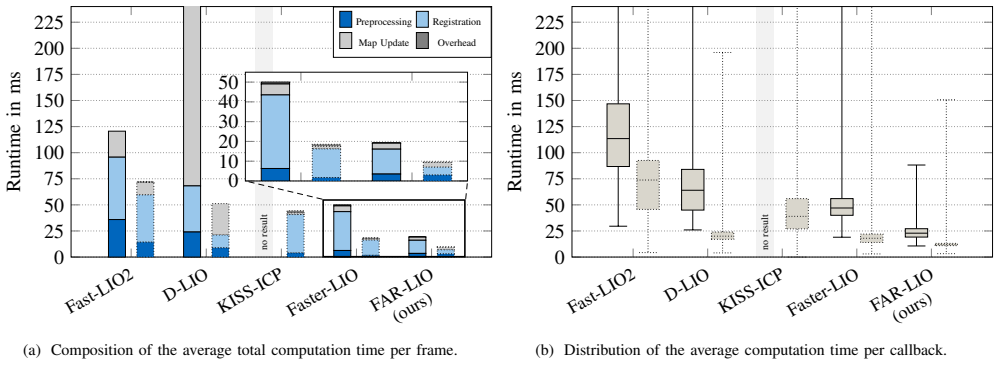
FAR-LIO achieves an average 6.9% reduction in the positional error and 38.4% lower runtime compared to state-of-the-art baselines on target hardware using a single parameter set. The system uses a novel CUDA-based voxel hashmap to enable parallelized nearest-neighbor search and efficient map updates, a sparsity-aware Generalized Iterative Closest Point algorithm with adaptive thresholding and adaptive density on top of that hashmap, and an Extended Kalman Filter backend that fuses LiDAR odometry with high-frequency IMU data via upsampling and delay compensation to produce robust smooth output.
What carries the argument
The CUDA-based voxel hashmap that supports parallel nearest-neighbor search and map updates while enabling the sparsity-aware GICP with adaptive thresholding and density.
If this is right
- The framework can be deployed on varied sensor setups without per-setup retuning while preserving performance gains.
- Low latency supports stable closed-loop control during autonomous racing at speeds up to 250 km/h.
- IMU fusion with delay compensation produces smoother odometry output under sensor noise and dynamic motion.
- Broad applicability is shown by consistent results on both public datasets and data from two racecars.
Where Pith is reading between the lines
- The CUDA voxel hashmap approach could extend to other real-time perception tasks that need fast spatial queries.
- Lower dependence on hardware-specific tuning might speed up deployment of multi-vehicle robotic systems.
- The open-source release could support experiments that add further sensors for improved robustness in noisy settings.
- The method may prove viable for high-speed navigation outside racing such as certain drone or ground vehicle scenarios.
Load-bearing premise
The single parameter set will maintain accuracy and low latency on any new sensor setup or motion profile without retuning.
What would settle it
A measurement on a fifth sensor setup or motion profile showing higher average positional error or higher runtime than the baselines when the published single parameter set is used.
Figures
read the original abstract
Robust and accurate odometry estimation is essential in modern robotics. In environments characterized by highly dynamic motion and sensor noise, odometry estimation becomes increasingly challenging. Autonomous racing combines both factors in an unstructured setting, where minimizing odometry latency is essential for stable closed-loop control. This paper introduces FAR-LIO, a highly optimized CUDA-accelerated LiDAR-inertial odometry framework developed for Fast, Accurate, and Robust performance. Our system leverages a novel CUDA-based voxel hashmap to enable parallelized nearest-neighbor search and efficient map updates. We employ a sparsity-aware Generalized Iterative Closest Point algorithm with adaptive thresholding on top of the CUDA-based voxel hashmap with adaptive density to achieve low-latency without compromising accuracy. An Extended Kalman Filter serves as a robust backend. It utilizes an upsampling and delay compensation strategy to fuse the LiDAR odometry with high-frequency IMU data, thereby ensuring a robust and smooth odometry output. We evaluate FAR-LIO across four different sensor setups, using both public datasets and data from two autonomous racecars driving at speeds of up to 250 km/h. FAR-LIO achieves an average 6.9% reduction in the positional error and 38.4% lower runtime compared to state-of-the-art baselines on target hardware using a single parameter set. This demonstrates its computational efficiency and broad applicability. To build upon our work, our code is available open-source on https://github.com/TUMFTM/FAR-LIO.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces FAR-LIO, a CUDA-accelerated LiDAR-inertial odometry framework for high-speed autonomy. It features a novel CUDA voxel hashmap enabling parallel nearest-neighbor search and map updates, a sparsity-aware Generalized ICP algorithm with adaptive thresholding and density adaptation for low-latency registration, and an EKF backend that uses upsampling and delay compensation to fuse LiDAR odometry with high-frequency IMU measurements. Evaluated on four sensor setups (public datasets plus autonomous racecar data at speeds up to 250 km/h), the system reports an average 6.9% reduction in positional error and 38.4% lower runtime versus state-of-the-art baselines on target hardware, all achieved with a single parameter set. The code is released open-source.
Significance. If the single-parameter-set claim holds without per-setup retuning, the work would provide a practical advance for latency-critical odometry in unstructured, high-dynamic environments such as autonomous racing. The open-source release is a clear strength that supports reproducibility. The significance is tempered by the need to confirm that the adaptive components truly require no hidden constants across varying LiDAR configurations.
major comments (2)
- [Abstract and §3] Abstract and §3 (Method): The headline claim of 6.9% lower positional error and 38.4% lower runtime 'using a single parameter set' across four LiDAR configurations is load-bearing. The manuscript does not demonstrate that the adaptive thresholding rule in the sparsity-aware GICP (how the density threshold or voxel size is computed from local point statistics) is free of hidden constants or invariant to beam count, FOV, and motion bandwidth. Without an explicit parameter listing, sensitivity analysis, or proof that the adaptation rule contains no setup-specific values, the single-set assertion cannot be verified.
- [§4] §4 (Experiments): The reported averages lack error bars, standard deviations, trial counts, dataset sizes, and exclusion criteria. This omission prevents assessment of whether the 6.9% and 38.4% figures are statistically robust or influenced by post-hoc baseline implementations or data selection.
minor comments (2)
- The abstract refers to 'target hardware' without specifying the GPU/CPU model or memory configuration used for the runtime benchmarks.
- Consider adding a dedicated table that enumerates every tunable parameter and its fixed value to directly support the single-parameter-set claim.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below with clarifications drawn directly from the manuscript and commit to revisions that enhance verifiability without altering the core claims.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Method): The headline claim of 6.9% lower positional error and 38.4% lower runtime 'using a single parameter set' across four LiDAR configurations is load-bearing. The manuscript does not demonstrate that the adaptive thresholding rule in the sparsity-aware GICP (how the density threshold or voxel size is computed from local point statistics) is free of hidden constants or invariant to beam count, FOV, and motion bandwidth. Without an explicit parameter listing, sensitivity analysis, or proof that the adaptation rule contains no setup-specific values, the single-set assertion cannot be verified.
Authors: The adaptive thresholding and voxel-size adaptation rules in §3.2 are computed exclusively from local point statistics (point count per voxel and spatial variance) and contain no explicit dependence on beam count, FOV, or motion bandwidth. All other parameters remain fixed at the values listed in the implementation details. To make this fully verifiable, the revised manuscript will include (i) an explicit table of every parameter and its single value used across all four sensor setups and (ii) a sensitivity study showing that performance remains within the reported margins when the adaptation rules are applied to the different LiDAR configurations. These additions will appear in §3 and the supplementary material. revision: yes
-
Referee: [§4] §4 (Experiments): The reported averages lack error bars, standard deviations, trial counts, dataset sizes, and exclusion criteria. This omission prevents assessment of whether the 6.9% and 38.4% figures are statistically robust or influenced by post-hoc baseline implementations or data selection.
Authors: We agree that the experimental presentation would be strengthened by these statistics. The revised §4 will report standard deviations, include error bars on all bar and trajectory plots, state the number of sequences and total distance evaluated per dataset, and document any exclusion criteria. Baseline implementations follow the original authors’ public releases and recommended parameter settings; this will be stated explicitly to address concerns about post-hoc tuning. revision: yes
Circularity Check
No circularity; empirical claims rest on external baselines
full rationale
The paper is an engineering contribution whose headline results (6.9% lower positional error, 38.4% lower runtime on one parameter set across four sensor setups) are obtained by direct comparison to external state-of-the-art baselines on public and proprietary datasets. No equations, derivations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text that would reduce the claimed performance to quantities defined by the authors' own inputs. The single-parameter-set assertion is presented as an empirical outcome, not a self-definitional or load-bearing uniqueness result.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,
I. Vizzo, T. Guadagnino, B. Mersch, L. Wiesmann, J. Behley, and C. Stachniss, “KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way,”IEEE Robotics and Automation Letters (RA-L), vol. 8, no. 2, pp. 1029–1036, 2023
2023
-
[2]
Ros: an open-source robot operating system,
M. Quigley, K. Conley, B. Gerkey, J. Faust, T. Foote, J. Leibs, R. Wheeler, A. Y . Nget al., “Ros: an open-source robot operating system,” inIEEE International Conference on Robotics and Automa- tion (ICRA) workshop on open source software, vol. 3, no. 3.2. Kobe, 2009, p. 5
2009
-
[3]
Robot operating system 2: Design, architecture, and uses in the wild,
S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot operating system 2: Design, architecture, and uses in the wild,” Science Robotics, vol. 7, no. 66, p. eabm6074, 2022
2022
-
[4]
Are we ready for autonomous driving? the kitti vision benchmark suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? the kitti vision benchmark suite,” in2012 IEEE Conference on Computer Vision and Pattern Recognition, 2012, pp. 3354–3361
2012
-
[5]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,”International Journal of Robotics Research (IJRR), 2013
2013
-
[6]
Loam: Lidar odometry and mapping in real-time
J. Zhang, S. Singhet al., “Loam: Lidar odometry and mapping in real-time.” inRobotics: Science and systems, vol. 2, no. 9. Berkeley, CA, 2014, pp. 1–9
2014
-
[7]
Lego-loam: Lightweight and ground- optimized lidar odometry and mapping on variable terrain,
T. Shan and B. Englot, “Lego-loam: Lightweight and ground- optimized lidar odometry and mapping on variable terrain,” in2018 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2018, pp. 4758–4765
2018
-
[8]
F-loam: Fast lidar odometry and mapping,
H. Wang, C. Wang, C.-L. Chen, and L. Xie, “F-loam: Fast lidar odometry and mapping,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 4390– 4396
2021
-
[9]
A method for registration of 3-d shapes,
P. Besl and N. D. McKay, “A method for registration of 3-d shapes,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 14, no. 2, pp. 239–256, 1992
1992
-
[10]
Generalized-icp,
A. V . Segal, D. Hähnel, and S. Thrun, “Generalized-icp,” inRobotics: Science and Systems, 2009
2009
-
[11]
Suma++: Efficient lidar-based semantic slam,
X. Chen, A. Milioto, E. Palazzolo, P. Giguere, J. Behley, and C. Stachniss, “Suma++: Efficient lidar-based semantic slam,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019, pp. 4530–4537
2019
-
[12]
V oxelized gicp for fast and accurate 3d point cloud registration,
K. Koide, M. Yokozuka, S. Oishi, and A. Banno, “V oxelized gicp for fast and accurate 3d point cloud registration,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 11 054–11 059
2021
-
[13]
Ct-icp: Real-time elastic lidar odometry with loop closure,
P. Dellenbach, J.-E. Deschaud, B. Jacquet, and F. Goulette, “Ct-icp: Real-time elastic lidar odometry with loop closure,” in2022 IEEE International Conference on Robotics and Automation (ICRA), 2022, pp. 5580–5586
2022
-
[14]
Direct lidar odometry: Fast localization with dense point clouds,
K. Chen, B. T. Lopez, A.-a. Agha-mohammadi, and A. Mehta, “Direct lidar odometry: Fast localization with dense point clouds,”IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 2, pp. 2000–2007, 2022
2000
-
[15]
Traj-lo: In defense of lidar-only odometry using an effective continuous-time trajectory,
X. Zheng and J. Zhu, “Traj-lo: In defense of lidar-only odometry using an effective continuous-time trajectory,”IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 2, pp. 1961–1968, 2024
1961
-
[16]
Genz-icp: Generalizable and degeneracy- robust lidar odometry using an adaptive weighting,
D. Lee, H. Lim, and S. Han, “Genz-icp: Generalizable and degeneracy- robust lidar odometry using an adaptive weighting,”IEEE Robotics and Automation Letters (RA-L), 2024
2024
-
[17]
Mad-icp: It is all about matching data–robust and informed lidar odometry,
S. Ferrari, L. Di Giammarino, L. Brizi, and G. Grisetti, “Mad-icp: It is all about matching data–robust and informed lidar odometry,”IEEE Robotics and Automation Letters (RA-L), 2024
2024
-
[18]
LIO-EKF: High frequency LiDAR-inertial odometry using extended Kalman filters,
Y . Wu, T. Guadagnino, L. Wiesmann, L. Klingbeil, C. Stachniss, and H. Kuhlmann, “LIO-EKF: High frequency LiDAR-inertial odometry using extended Kalman filters,” in2024 IEEE International Confer- ence on Robotics and Automation (ICRA), 2024
2024
-
[19]
Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,” in2020 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2020, pp. 5135–5142
2020
-
[20]
Locus 2.0: Robust and computationally efficient lidar odometry for real-time 3d mapping,
A. Reinke, M. Palieri, B. Morrell, Y . Chang, K. Ebadi, L. Carlone, and A.-A. Agha-Mohammadi, “Locus 2.0: Robust and computationally efficient lidar odometry for real-time 3d mapping,”IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 4, pp. 9043–9050, 2022
2022
-
[21]
Locus: A multi-sensor lidar-centric solution for high- precision odometry and 3d mapping in real-time,
M. Palieri, B. Morrell, A. Thakur, K. Ebadi, J. Nash, A. Chat- terjee, C. Kanellakis, L. Carlone, C. Guaragnella, and A.-a. Agha- Mohammadi, “Locus: A multi-sensor lidar-centric solution for high- precision odometry and 3d mapping in real-time,”IEEE Robotics and Automation Letters (RA-L), vol. 6, no. 2, pp. 421–428, 2020
2020
-
[22]
Glim: 3d range- inertial localization and mapping with gpu-accelerated scan matching factors,
K. Koide, M. Yokozuka, S. Oishi, and A. Banno, “Glim: 3d range- inertial localization and mapping with gpu-accelerated scan matching factors,”Robotics and Autonomous Systems, vol. 179, p. 104750, 2024
2024
-
[23]
Lins: A lidar-inertial state estimator for robust and efficient navigation,
C. Qin, H. Ye, C. E. Pranata, J. Han, S. Zhang, and M. Liu, “Lins: A lidar-inertial state estimator for robust and efficient navigation,” in2020 IEEE international conference on robotics and automation (ICRA). IEEE, 2020, pp. 8899–8906
2020
-
[24]
Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,
W. Xu and F. Zhang, “Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,”IEEE Robotics and Automation Letters (RA-L), vol. 6, no. 2, pp. 3317–3324, 2021
2021
-
[25]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
2053
-
[26]
ikd-tree: An incremental kd tree for robotic applications,
Y . Cai, W. Xu, and F. Zhang, “ikd-tree: An incremental kd tree for robotic applications,”arXiv preprint arXiv:2102.10808, 2021
arXiv 2021
-
[27]
Faster- lio: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels,
C. Bai, T. Xiao, Y . Chen, H. Wang, F. Zhang, and X. Gao, “Faster- lio: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels,”IEEE Robotics and Automation Letters (RA-L), vol. 7, no. 2, pp. 4861–4868, 2022
2022
-
[28]
Direct lidar-inertial odome- try: Lightweight lio with continuous-time motion correction,
K. Chen, R. Nemiroff, and B. T. Lopez, “Direct lidar-inertial odome- try: Lightweight lio with continuous-time motion correction,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3983–3989
2023
-
[29]
Real-time 3d reconstruction at scale using voxel hashing,
M. Nießner, M. Zollhöfer, S. Izadi, and M. Stamminger, “Real-time 3d reconstruction at scale using voxel hashing,”ACM Transactions on Graphics (TOG), 2013
2013
-
[30]
Analysis of robust functions for registration algorithms,
P. Babin, P. Giguère, and F. Pomerleau, “Analysis of robust functions for registration algorithms,” in2019 IEEE International Conference on Robotics and Automation (ICRA), 2019, pp. 1451–1457
2019
-
[31]
Three-dimensional vehicle dynamics state estimation for high-speed race cars under varying sig- nal quality,
S. Goblirsch, M. Weinmann, and J. Betz, “Three-dimensional vehicle dynamics state estimation for high-speed race cars under varying sig- nal quality,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 3371–3378
2024
-
[32]
Estimation of land vehicle roll and pitch angles,
L. X. H. Eric Tseng and D. Hrovat, “Estimation of land vehicle roll and pitch angles,”Vehicle System Dynamics, vol. 45, no. 5, pp. 433– 443, 2007
2007
-
[33]
Incorporation of time delayed measurements in a discrete-time kalman filter,
T. Larsen, N. Andersen, O. Ravn, and N. Poulsen, “Incorporation of time delayed measurements in a discrete-time kalman filter,” in Proceedings of the 37th IEEE Conference on Decision and Control, vol. 4, 1998, pp. 3972–3977 vol.4
1998
-
[34]
Mulran: Multimodal range dataset for urban place recognition,
G. Kim, Y . S. Park, Y . Cho, J. Jeong, and A. Kim, “Mulran: Multimodal range dataset for urban place recognition,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 6246–6253
2020
-
[35]
Head-to-head autonomous racing at the limits of handling in the a2rl challenge,
S. Hoffmann, S. Sagmeister, T. Betz, J. Bongard, S. Büttner, D. Ebner, D. Esser, G. Jank, S. Goblirsch, A. Langmann, M. Leitenstern, L. Ögretmen, P. Pitschi, A.-K. Schwehn, C. Schröder, M. Weinmann, F. Werner, B. Lohmann, J. Betz, and M. Lienkamp, “Head-to-head autonomous racing at the limits of handling in the a2rl challenge,”
-
[36]
Available: https://arxiv.org/abs/2602.08571
[Online]. Available: https://arxiv.org/abs/2602.08571
-
[37]
evo: Python package for the evaluation of odometry and slam
M. Grupp, “evo: Python package for the evaluation of odometry and slam.” https://github.com/MichaelGrupp/evo, 2017
2017
-
[38]
Rslcpp - deterministic simulations using ros 2,
S. Sagmeister, M. Weinmann, P. Pitschi, and M. Lienkamp, “Rslcpp - deterministic simulations using ros 2,” 2026. [Online]. Available: https://arxiv.org/abs/2601.07052
Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.