UAV-MapFusion: RTK-Aligned Uncertainty-Aware Coarse-to-Fine Multi-Session UAV Mapping
Pith reviewed 2026-06-26 05:18 UTC · model grok-4.3
The pith
An RTK-aligned uncertainty-aware system merges multi-session UAV point cloud maps to suppress long-range drift while preserving local geometric accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
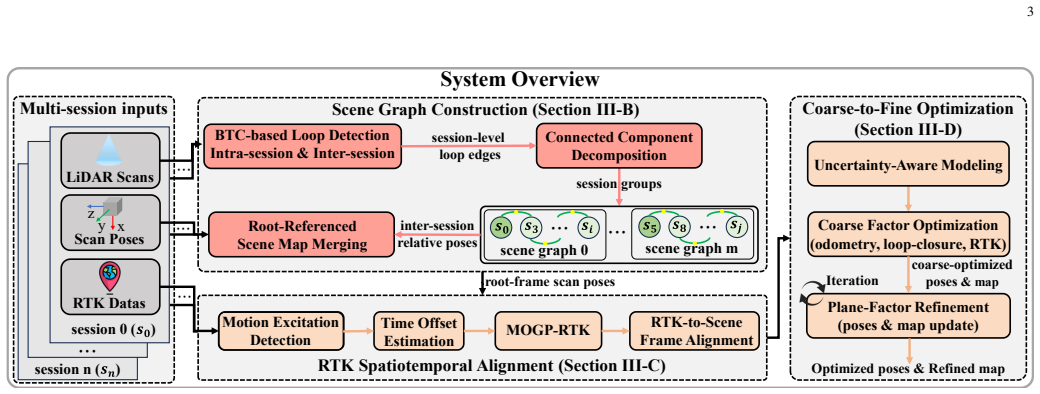
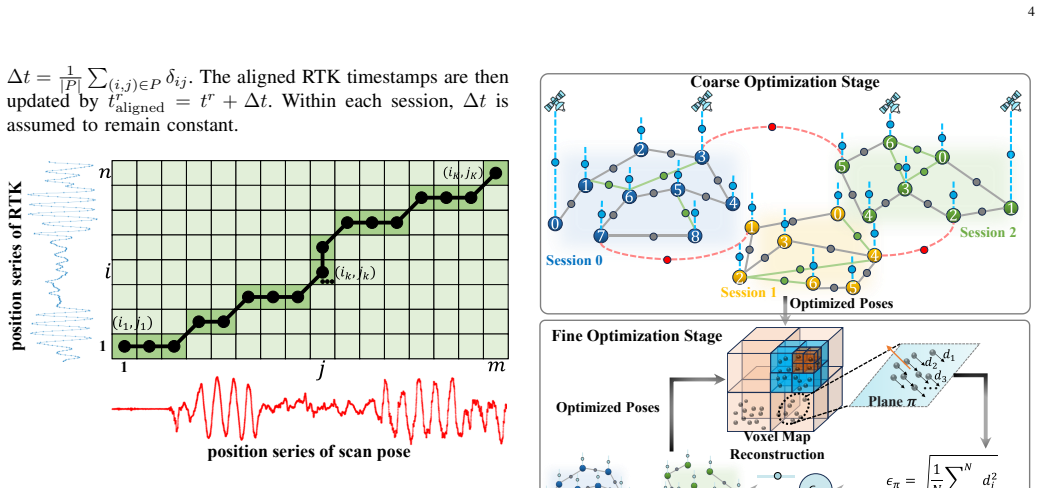
The proposed uncertainty-aware multi-session point cloud map merging and coarse-to-fine optimization system first performs initial merging based on a scene graph, then incorporates RTK observations through an RTK spatiotemporal alignment module where temporal offsets are estimated using Dynamic Time Warping and continuous RTK constraints are recovered using Multi-Output Gaussian Processes under incomplete sampling and frame dropouts; on this basis a unified uncertainty-aware factor graph is constructed and local geometric accuracy is further improved through iterative plane-factor refinement, allowing simultaneous suppression of long-range drift and preservation of local geometric accuracy i
What carries the argument
The RTK spatiotemporal alignment module that estimates temporal offsets with Dynamic Time Warping and recovers continuous constraints with Multi-Output Gaussian Processes, feeding an uncertainty-aware factor graph refined by iterative plane factors.
If this is right
- Multi-session UAV maps achieve extended range with suppressed long-range drift.
- Local geometric accuracy is maintained through iterative plane-factor refinement.
- The approach handles incomplete RTK sampling and frame dropouts via DTW and MOGP.
- Real-world experiments demonstrate effectiveness and robustness for UAV mapping tasks.
- Public release of code and dataset enables community validation and extension.
Where Pith is reading between the lines
- The alignment technique could transfer to other platforms that collect intermittent high-accuracy position data alongside dense sensors.
- Uncertainty-aware fusion may reduce the need for perfect RTK coverage in future multi-robot mapping deployments.
- The coarse-to-fine structure suggests a path toward incremental online merging rather than batch post-processing.
- Testing on larger or more varied environments would reveal whether the drift-suppression benefit scales beyond the reported datasets.
Load-bearing premise
RTK observations can be incorporated through an RTK spatiotemporal alignment module where temporal offsets are estimated using Dynamic Time Warping and continuous RTK constraints are recovered using Multi-Output Gaussian Processes under incomplete sampling and frame dropouts.
What would settle it
A controlled comparison on real-world UAV datasets with independent ground truth where the proposed merged maps exhibit larger long-range drift or lower local geometric fidelity than single-session baselines or non-RTK multi-session methods would falsify the central claim.
Figures


read the original abstract
Large-scale point cloud maps are essential for robotics and spatial intelligence tasks. UAVs provide an efficient means for large-scale map acquisition; however, due to limited flight endurance and onboard storage, mapping a large-scale scene within a single flight remains difficult. Existing multi-session map merging methods can extend the mapping range, yet in UAV scenarios they still struggle to simultaneously suppress long-range drift and preserve local geometric accuracy. To address this issue, an uncertainty-aware multi-session point cloud map merging and coarse-to-fine optimization system is proposed. The proposed method first performs initial multi-session map merging based on a scene graph, and then incorporates RTK observations through an RTK spatiotemporal alignment module, where temporal offsets are estimated using Dynamic Time Warping (DTW), and continuous RTK constraints are recovered using Multi-Output Gaussian Processes (MOGP) under incomplete sampling and frame dropouts. On this basis, a unified uncertainty-aware factor graph is constructed, and local geometric accuracy is further improved through iterative plane-factor refinement. Experiments on real-world datasets validate the effectiveness and robustness of the proposed method. To facilitate further research and development in the community, our code and dataset will be publicly released.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes UAV-MapFusion, a coarse-to-fine multi-session UAV mapping pipeline that performs initial scene-graph merging of point clouds, then incorporates RTK data via a spatiotemporal alignment module (DTW for temporal offsets + MOGP to recover continuous constraints under incomplete sampling and dropouts), builds a unified uncertainty-aware factor graph, and applies iterative plane-factor refinement to suppress long-range drift while preserving local geometry. Real-world dataset experiments are stated to validate effectiveness and robustness, with code and data to be released.
Significance. If the central claim holds with quantitative support, the work would be significant for UAV robotics by providing a practical way to fuse multi-session maps at scale using RTK without trading off global consistency against local fidelity. The explicit handling of frame dropouts via MOGP and the planned public release of code/dataset are strengths that would aid reproducibility and follow-on work.
major comments (1)
- [Abstract] Abstract (RTK spatiotemporal alignment module): the central claim requires that MOGP-recovered continuous RTK constraints suppress long-range drift without introducing low-frequency bias or over-confident factors that distort local point-cloud geometry under realistic UAV frame dropouts. No derivation, consistency proof, or ablation isolating MOGP extrapolation error versus DTW window size or sampling gaps is referenced; this step is load-bearing for the 'simultaneously suppress drift and preserve local accuracy' result.
minor comments (1)
- [Abstract] Abstract: the validation statement mentions 'real-world datasets' but provides no quantitative metrics, baselines, error bars, or ablation tables; these details are needed to assess whether the data support the claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the RTK spatiotemporal alignment module. We agree that additional justification for the MOGP component is warranted to support the central claim and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract (RTK spatiotemporal alignment module): the central claim requires that MOGP-recovered continuous RTK constraints suppress long-range drift without introducing low-frequency bias or over-confident factors that distort local point-cloud geometry under realistic UAV frame dropouts. No derivation, consistency proof, or ablation isolating MOGP extrapolation error versus DTW window size or sampling gaps is referenced; this step is load-bearing for the 'simultaneously suppress drift and preserve local accuracy' result.
Authors: We acknowledge the concern. While Section IV.B presents the MOGP formulation for recovering continuous constraints under dropouts, the manuscript lacks an explicit derivation of consistency properties, a proof sketch addressing low-frequency bias, and a targeted ablation on extrapolation error relative to DTW parameters. We will add a new subsection in the methods (with a short consistency argument based on the multi-output GP covariance structure) and include an ablation study in the experiments that isolates MOGP error versus DTW window size and sampling gap severity. These additions will directly support the claim that the recovered constraints suppress drift without distorting local geometry. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper integrates standard external techniques (DTW for temporal offsets, MOGP for continuous constraint recovery from incomplete samples, scene graphs, factor graphs, and plane-factor refinement) without defining any quantity in terms of itself or presenting fitted parameters as independent predictions. No self-citation chains, uniqueness theorems, or ansatzes from prior author work are invoked as load-bearing steps in the provided abstract and method description. The central claim of simultaneous drift suppression and local accuracy preservation rests on the composition of these established components rather than reducing to a tautology or renaming of inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,
C. Cadena, L. Carlone, H. Carrillo, Y . Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard, “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,”IEEE Transactions on robotics, vol. 32, no. 6, pp. 1309–1332, 2017
2017
-
[2]
Appli- cations of 3d city models: State of the art review,
F. Biljecki, J. Stoter, H. Ledoux, S. Zlatanova, and A. C ¸ ¨oltekin, “Appli- cations of 3d city models: State of the art review,”ISPRS International Journal of Geo-Information, vol. 4, no. 4, pp. 2842–2889, 2015
2015
-
[3]
Autonomous navigation using a real-time 3d point cloud,
M. Whitty, S. Cossell, K. S. Dang, J. Guivant, and J. Katupitiya, “Autonomous navigation using a real-time 3d point cloud,” in2010 Australasian Conference on Robotics and Automation, 2010, pp. 1–3
2010
-
[4]
Fast-calib: Lidar-camera extrinsic calibration in one second,
C. Zheng and F. Zhang, “Fast-calib: Lidar-camera extrinsic calibration in one second,”IEEE Robotics and Automation Practice, 2026
2026
-
[5]
A survey on lidar-based autonomous aerial vehicles,
Y . Ren, Y . Cai, H. Li, N. Chen, F. Zhu, L. Yin, F. Kong, R. Li, and F. Zhang, “A survey on lidar-based autonomous aerial vehicles,” IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[6]
Large-scale multi-session point-cloud map merging,
H. Wei, R. Li, Y . Cai, C. Yuan, Y . Ren, Z. Zou, H. Wu, C. Zheng, S. Zhou, K. Xueet al., “Large-scale multi-session point-cloud map merging,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 88–95, 2024
2024
-
[7]
Ms- mapping: an uncertainty-aware large-scale multi-session lidar mapping system,
X. Hu, J. Wu, J. Jiao, B. Jiang, W. Zhang, W. Wang, and P. Tan, “Ms- mapping: an uncertainty-aware large-scale multi-session lidar mapping system,”arXiv preprint arXiv:2408.03723, 2024
-
[8]
Scan context++: Structural place recog- nition robust to rotation and lateral variations in urban environments,
G. Kim, S. Choi, and A. Kim, “Scan context++: Structural place recog- nition robust to rotation and lateral variations in urban environments,” IEEE Transactions on Robotics, vol. 38, no. 3, pp. 1856–1874, 2021
2021
-
[9]
Btc: A binary and triangle combined descriptor for 3-d place recognition,
C. Yuan, J. Lin, Z. Liu, H. Wei, X. Hong, and F. Zhang, “Btc: A binary and triangle combined descriptor for 3-d place recognition,”IEEE Transactions on Robotics, vol. 40, pp. 1580–1599, 2024
2024
-
[10]
Ibtc: an image-assisting binary and triangle combined descriptor for place recognition by fusing lidar and camera measurements,
Z. Zou, C. Zheng, C. Yuan, S. Zhou, K. Xue, and F. Zhang, “Ibtc: an image-assisting binary and triangle combined descriptor for place recognition by fusing lidar and camera measurements,”IEEE Robotics and Automation Letters, vol. 9, no. 12, pp. 10 858–10 865, 2024
2024
-
[11]
Ring++: Roto-translation invariant gram for global localization on a sparse scan map,
X. Xu, S. Lu, J. Wu, H. Lu, Q. Zhu, Y . Liao, R. Xiong, and Y . Wang, “Ring++: Roto-translation invariant gram for global localization on a sparse scan map,”IEEE Transactions on Robotics, vol. 39, no. 6, pp. 4616–4635, 2023
2023
-
[12]
Pointnetvlad: Deep point cloud based retrieval for large-scale place recognition,
M. A. Uy and G. H. Lee, “Pointnetvlad: Deep point cloud based retrieval for large-scale place recognition,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 4470–4479
2018
-
[13]
Osprey: Multisession autonomous aerial mapping with lidar-based slam and next best view planning,
R. Border, N. Chebrolu, Y . Tao, J. D. Gammell, and M. Fallon, “Osprey: Multisession autonomous aerial mapping with lidar-based slam and next best view planning,”IEEE Transactions on Field Robotics, vol. 1, pp. 113–130, 2024
2024
-
[14]
Minkloc3d: Point cloud based large-scale place recog- nition,
J. Komorowski, “Minkloc3d: Point cloud based large-scale place recog- nition,” in2021 IEEE Winter Conference on Applications of Computer Vision (WACV), 2021, pp. 1789–1798
2021
-
[15]
Pairwise consistent measurement set maximization for robust multi- robot map merging,
J. G. Mangelson, D. Dominic, R. M. Eustice, and R. Vasudevan, “Pairwise consistent measurement set maximization for robust multi- robot map merging,” in2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 2916–2923
2018
-
[16]
Frame: Fast and robust autonomous 3d point cloud map- merging for egocentric multi-robot exploration,
N. Stathoulopoulos, A. Koval, A.-a. Agha-mohammadi, and G. Niko- lakopoulos, “Frame: Fast and robust autonomous 3d point cloud map- merging for egocentric multi-robot exploration,” in2023 IEEE Interna- tional Conference on Robotics and Automation (ICRA), 2023, pp. 3483– 3489
2023
-
[17]
Lta-om: Long-term association lidar–imu odometry and mapping,
Z. Zou, C. Yuan, W. Xu, H. Li, S. Zhou, K. Xue, and F. Zhang, “Lta-om: Long-term association lidar–imu odometry and mapping,” Journal of Field Robotics, vol. 41, no. 7, pp. 2455–2474, 2024. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.22337
-
[18]
Automerge: A framework for map assembling and smoothing in city- scale environments,
P. Yin, S. Zhao, H. Lai, R. Ge, J. Zhang, H. Choset, and S. Scherer, “Automerge: A framework for map assembling and smoothing in city- scale environments,”IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3686–3704, 2023
2023
-
[19]
Multi-session, localization- oriented and lightweight lidar mapping using semantic lines and planes,
Z. Yu, Z. Qiao, L. Qiu, H. Yin, and S. Shen, “Multi-session, localization- oriented and lightweight lidar mapping using semantic lines and planes,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 7210–7217
2023
-
[20]
Lamp 2.0: A robust multi-robot slam sys- tem for operation in challenging large-scale underground environments,
Y . Chang, K. Ebadi, C. E. Denniston, M. F. Ginting, A. Rosinol, A. Reinke, M. Palieri, J. Shi, A. Chatterjee, B. Morrell, A.-a. Agha- mohammadi, and L. Carlone, “Lamp 2.0: A robust multi-robot slam sys- tem for operation in challenging large-scale underground environments,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9175–9182, 2022
2022
-
[21]
Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,” in2022 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2022, pp. 4003–4009
2022
-
[22]
Fast-livo2: Fast, direct lidar–inertial–visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhuet al., “Fast-livo2: Fast, direct lidar–inertial–visual odometry,”IEEE Transactions on Robotics, vol. 41, pp. 326–346, 2024
2024
-
[23]
Fast- livo2 on resource-constrained platforms: Lidar-inertial-visual odometry with efficient memory and computation,
B. Zhou, C. Zheng, Z. Wang, F. Zhu, Y . Cai, and F. Zhang, “Fast- livo2 on resource-constrained platforms: Lidar-inertial-visual odometry with efficient memory and computation,”IEEE Robotics and Automation Letters, 2025
2025
-
[24]
Factor graphs and gtsam: A hands-on introduction,
F. Dellaert, “Factor graphs and gtsam: A hands-on introduction,”Geor- gia Institute of Technology, Tech. Rep, vol. 2, no. 4, 2012
2012
-
[25]
Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,
H. Li, Y . Zou, N. Chen, J. Lin, X. Liu, W. Xu, C. Zheng, R. Li, D. He, F. Konget al., “Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,”The International Journal of Robotics Research, vol. 43, no. 8, pp. 1114–1127, 2024
2024
-
[26]
Supplementary material: UA V-MapFusion: RTK-aligned uncertainty- aware coarse-to-fine multi-session UA V mapping,
“Supplementary material: UA V-MapFusion: RTK-aligned uncertainty- aware coarse-to-fine multi-session UA V mapping,”Supplementary Ma- terial, Mar. 2026, [Online]. Available: https://github.com/cchester25/ MS-Fusion
2026
-
[27]
Mapeval: Towards unified, robust and efficient slam map evaluation framework,
X. Hu, J. Wu, M. Jia, H. Yan, Y . Jiang, B. Jiang, W. Zhang, W. He, and P. Tan, “Mapeval: Towards unified, robust and efficient slam map evaluation framework,”IEEE Robotics and Automation Letters, vol. 10, no. 5, pp. 4228–4235, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.