RadarTwin: Scene-Specific mmWave Radar Simulation and Learning for Mobile Indoor Perception
Pith reviewed 2026-06-30 01:36 UTC · model grok-4.3
The pith
RadarTwin generates scene-specific mmWave radar data from 3D reconstructions that trains models recognizing real objects at 2.5 times chance level with no real labels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
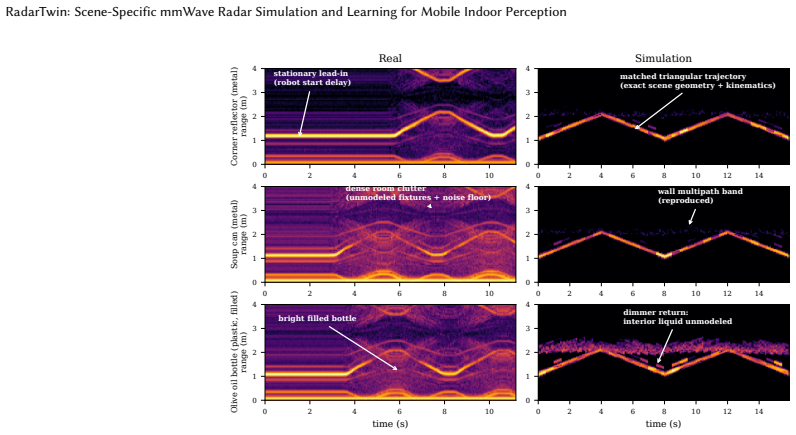
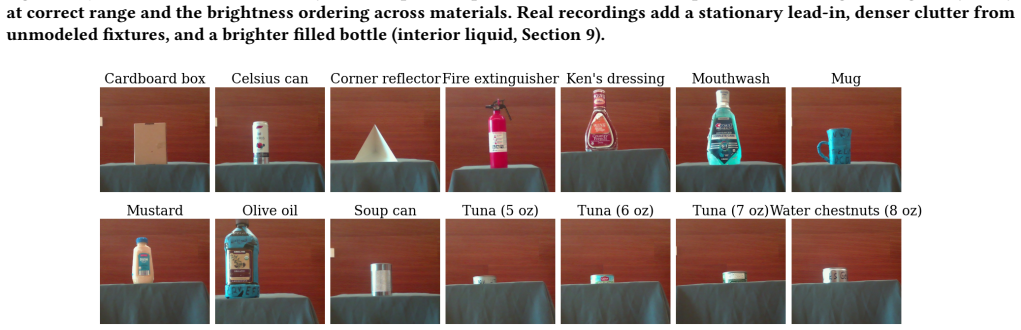
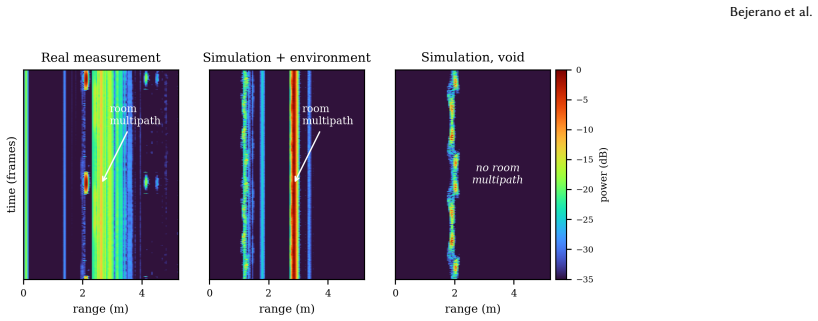
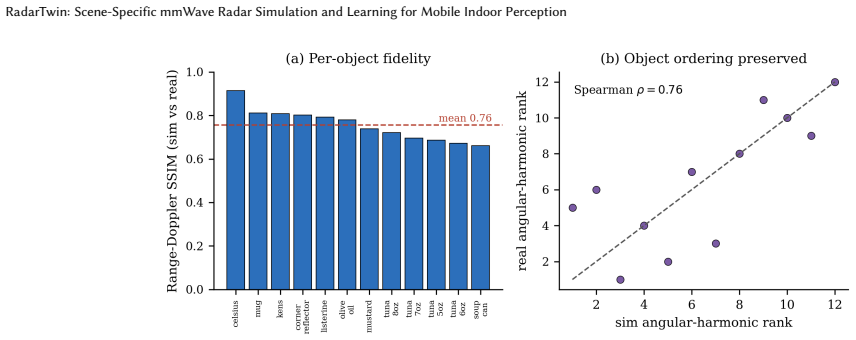
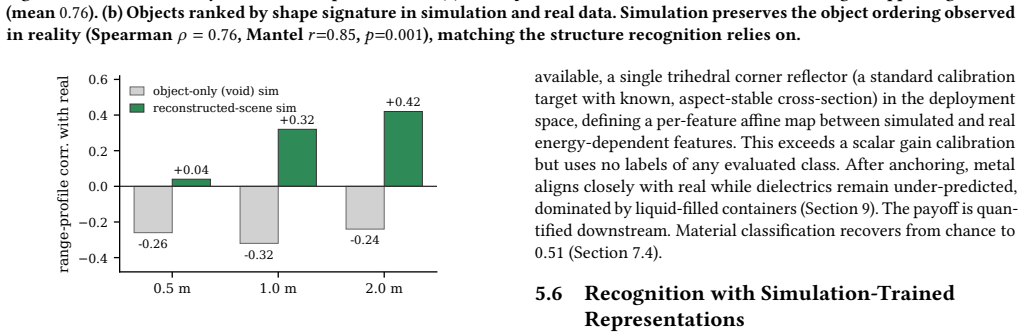
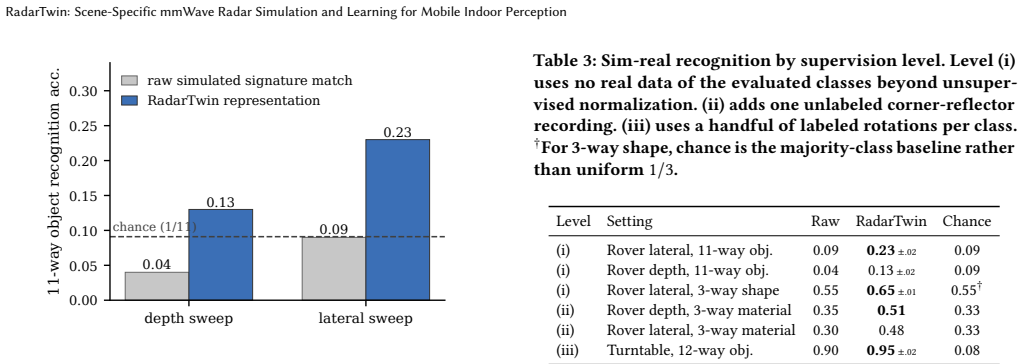
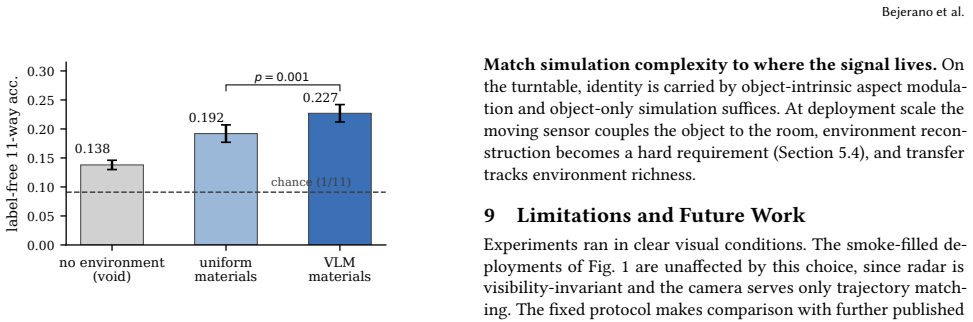
RadarTwin produces deployment-specific raw FMCW radar measurements by combining 3D scene reconstructions, vision-language model material inference, and a physics-based ray tracer with multi-bounce propagation. Simulated and real radar measurements collected in the same scenes share the same object-discriminative shape and material features, and modeling the environment's multipath is required to achieve this match. A representation trained on simulation alone recognizes real objects at 2.5 times chance with no real radar labels, while a few labeled real examples raise performance to 95.3 percent on a 12-way recognition task.
What carries the argument
The physics-based ray tracer with multi-bounce propagation and VLM-inferred materials that synthesizes raw FMCW radar measurements whose object-discriminative features match those in real data from the same scenes.
If this is right
- Models can be trained for radar perception in a new space before any real radar data is collected there.
- Multipath modeling is required for simulation to produce features that match real radar measurements.
- A small number of real labeled examples is sufficient to reach 95.3 percent accuracy on 12 object classes after simulation pre-training.
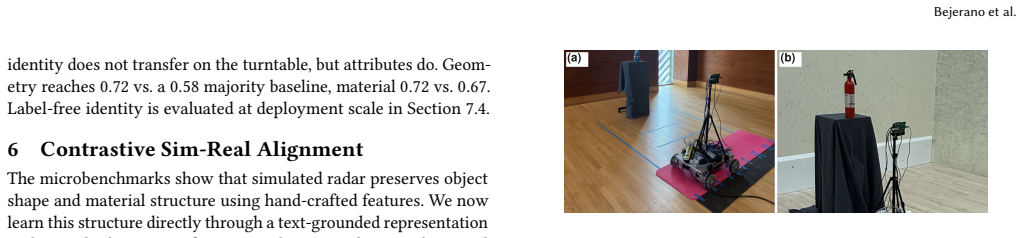
- The framework accepts 3D inputs from phone LiDAR, robot-mounted sensing, or RGB-to-3D reconstruction.
Where Pith is reading between the lines
- The approach could allow pre-training of mobile radar systems for new indoor environments without on-site radar collection campaigns.
- The same simulation pipeline might extend to other radar tasks such as localization or mapping if the feature match holds for those outputs.
- Dynamic elements like moving people would require additional modeling beyond the current static scene assumption to maintain transfer performance.
Load-bearing premise
The physics-based ray tracer with multi-bounce propagation combined with VLM-inferred materials produces simulated FMCW measurements whose object-discriminative features match those in real radar data collected in the same scenes.
What would settle it
Train a model on RadarTwin simulation for a new scene, then measure its accuracy on real radar data from that scene; performance at or below chance level on the 12-way task would falsify the transfer result.
Figures
read the original abstract
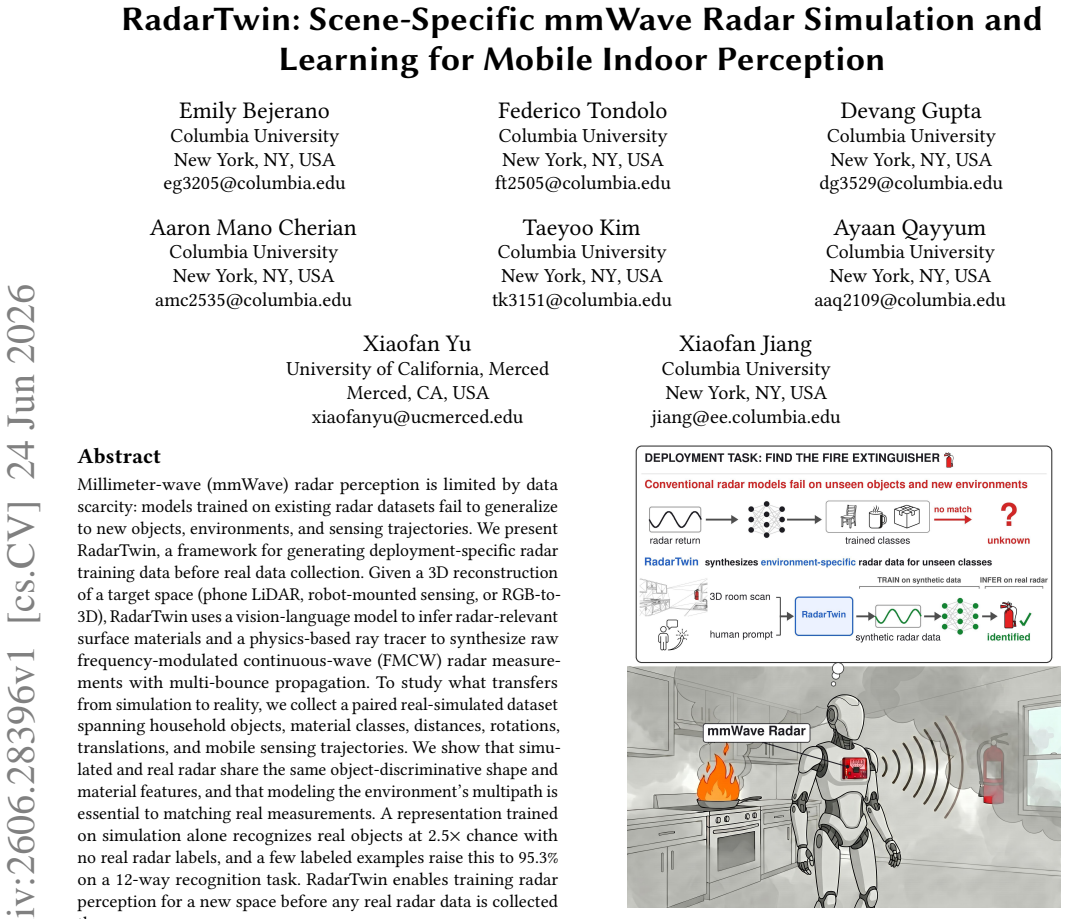
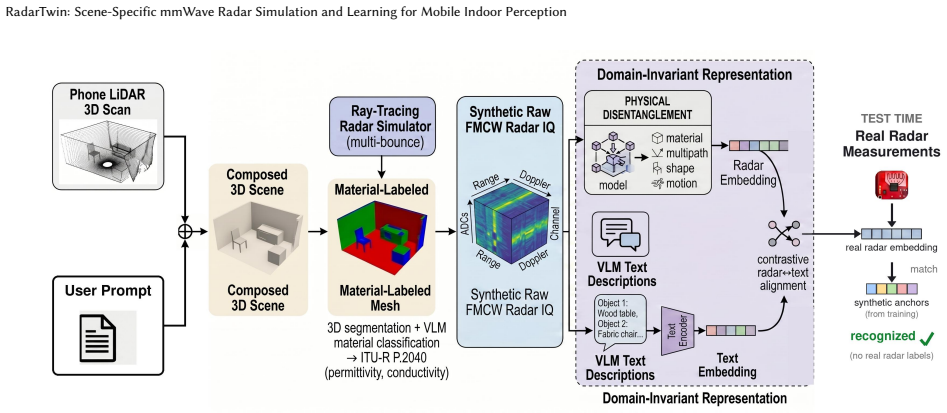
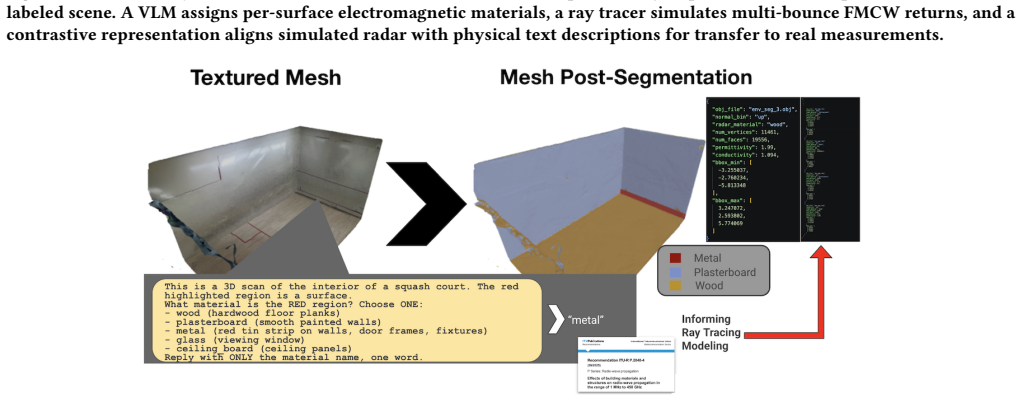
Millimeter-wave (mmWave) radar perception is limited by data scarcity: models trained on existing radar datasets fail to generalize to new objects, environments, and sensing trajectories. We present RadarTwin, a framework for generating deployment-specific radar training data before real data collection. Given a 3D reconstruction of a target space (phone LiDAR, robot-mounted sensing, or RGB-to-3D), RadarTwin uses a vision-language model to infer radar-relevant surface materials and a physics-based ray tracer to synthesize raw frequency-modulated continuous-wave (FMCW) radar measurements with multi-bounce propagation. To study what transfers from simulation to reality, we collect a paired real-simulated dataset spanning household objects, material classes, distances, rotations, translations, and mobile sensing trajectories. We show that simulated and real radar share the same object-discriminative shape and material features, and that modeling the environment's multipath is essential to matching real measurements. A representation trained on simulation alone recognizes real objects at 2.5 times chance with no real radar labels, and a few labeled examples raise this to 95.3% on a 12-way recognition task. RadarTwin enables training radar perception for a new space before any real radar data is collected there.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces RadarTwin, a framework for generating deployment-specific mmWave FMCW radar training data from 3D scene reconstructions (via phone LiDAR or RGB-to-3D). It uses a vision-language model to infer radar-relevant surface materials and a physics-based ray tracer with multi-bounce propagation to synthesize raw measurements. The authors collect a paired real-simulated dataset across household objects, materials, distances, and mobile trajectories, claiming that simulated and real radar share object-discriminative shape and material features. Models trained on simulation alone achieve 2.5 times chance zero-shot recognition on real data, improving to 95.3% with few labeled examples on a 12-way task; multipath modeling is stated to be essential for matching real measurements.
Significance. If the sim-to-real feature transfer holds, the work offers a practical route to mitigate data scarcity in indoor mmWave radar perception by enabling scene-specific synthetic data generation prior to any real radar collection. The paired dataset itself constitutes a useful contribution for studying transfer, and the explicit focus on multi-bounce effects addresses a known challenge in radar simulation.
major comments (2)
- [Abstract] Abstract: the central transfer claims (zero-shot at 2.5× chance, few-shot at 95.3% on 12-way recognition) rest on the unverified premise that VLM-inferred materials plus multi-bounce ray tracing produce FMCW signatures whose object-discriminative features match real measurements, yet no quantitative intermediate metrics (feature correlation, embedding distance, or controlled ablation accuracy) are supplied to confirm the match is sufficiently tight.
- [Abstract] Abstract: the reported performance figures are given without error bars, confidence intervals, number of trials, or exclusion criteria for the paired dataset, leaving the robustness of the 2.5× and 95.3% numbers difficult to assess.
minor comments (1)
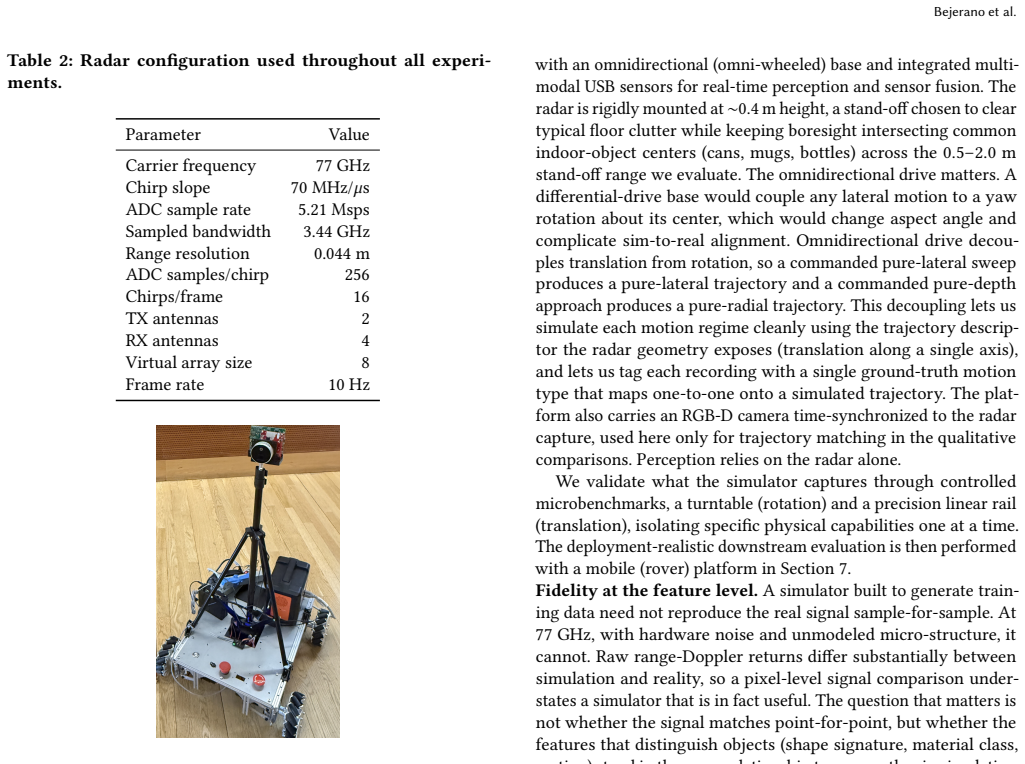
- The manuscript would benefit from an explicit description of the FMCW waveform parameters (chirp slope, bandwidth, etc.) used in both simulation and real collection to allow direct comparison.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comments on our manuscript. We address each major comment point-by-point below, agreeing where the observations are accurate and outlining specific revisions to strengthen the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central transfer claims (zero-shot at 2.5× chance, few-shot at 95.3% on 12-way recognition) rest on the unverified premise that VLM-inferred materials plus multi-bounce ray tracing produce FMCW signatures whose object-discriminative features match real measurements, yet no quantitative intermediate metrics (feature correlation, embedding distance, or controlled ablation accuracy) are supplied to confirm the match is sufficiently tight.
Authors: We agree that the manuscript would benefit from explicit intermediate metrics to quantify the sim-to-real feature alignment beyond end-task accuracy. The zero-shot and few-shot recognition results provide indirect evidence of shared discriminative features, and the paired dataset analysis shows that multipath modeling is essential, but we acknowledge the absence of direct metrics such as feature correlations or embedding distances. In the revision, we will add quantitative analyses including cosine similarity of radar embeddings between real and simulated data, correlation coefficients on shape/material features, and ablations isolating the contribution of multi-bounce propagation to these metrics. revision: yes
-
Referee: [Abstract] Abstract: the reported performance figures are given without error bars, confidence intervals, number of trials, or exclusion criteria for the paired dataset, leaving the robustness of the 2.5× and 95.3% numbers difficult to assess.
Authors: The referee is correct that the abstract (and corresponding results section) lacks these statistical details. We will revise the manuscript to report mean performance with standard deviation across multiple random seeds/trials, specify the number of independent runs, and clearly state the dataset collection and exclusion criteria (e.g., trajectory filtering rules and object instance splits) to allow proper assessment of robustness. revision: yes
Circularity Check
No significant circularity; results validated on newly collected paired dataset
full rationale
The paper's central claims rest on empirical transfer results measured against a newly collected paired real-simulated radar dataset spanning objects, materials, and trajectories. The simulation pipeline (VLM material inference + multi-bounce ray tracing) is presented as a generative method whose fidelity is tested externally rather than defined in terms of the recognition metrics. No load-bearing equations reduce predictions to fitted inputs by construction, and no self-citation chains or ansatzes are invoked to justify the core result. The evaluation is therefore self-contained against external real measurements.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Standard electromagnetic propagation models for mmWave FMCW radar accurately predict multi-bounce paths when material properties are known
- domain assumption Vision-language models can reliably map visual 3D surface geometry to radar-relevant dielectric properties
Reference graph
Works this paper leans on
-
[1]
Karan Ahuja, Yue Jiang, Mayank Goel, and Chris Harrison. 2021. Vid2Doppler: Synthesizing Doppler Radar Data from Videos for Training Privacy-Preserving Activity Recognition. InProceedings of the 2021 CHI Conference on Human Factors in Computing Systems (CHI ’21). ACM
2021
-
[2]
Ansys, Inc. 2024. Ansys HFSS: 3D High Frequency Simulation Software. https: //www.ansys.com/products/electronics/ansys-hfss
2024
-
[3]
Kshitiz Bansal, Gautham Reddy, and Dinesh Bharadia. 2024. SHENRON – Scalable, High Fidelity and Efficient Radar Simulation.IEEE Robotics and Automation Letters9, 2 (2024), 1644–1651. doi:10.1109/LRA.2023.3343168
-
[4]
Sean Bell, Paul Upchurch, Noah Snavely, and Kavita Bala. 2015. Material Recog- nition in the Wild with the Materials in Context Database. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
2015
-
[5]
Qiming Cao, Hongfei Xue, Tianci Liu, Xingchen Wang, Haoyu Wang, Xincheng Zhang, and Lu Su. 2024. mmCLIP: Boosting mmWave-based Zero-shot HAR via Signal-Text Alignment. InProceedings of the 22nd ACM Conference on Embedded Networked Sensor Systems (SenSys ’24). ACM, 184–197. doi:10.1145/3666025. 3699331
-
[6]
Xingyu Chen and Xinyu Zhang. 2023. RF Genesis: Zero-Shot Generalization of mmWave Sensing through Simulation-Based Data Synthesis and Generative Dif- fusion Models. InProceedings of the 21st ACM Conference on Embedded Networked Sensor Systems (SenSys ’23). ACM. doi:10.1145/3625687.3625798
-
[7]
Xingyu Chen and Xinyu Zhang. 2024. RFCanvas: Modeling RF Channel by Fusing Visual Priors and Few-shot RF Measurements. InProceedings of the 22nd ACM Conference on Embedded Networked Sensor Systems (SenSys ’24). ACM. doi:10.1145/3666025.3699351
-
[8]
Zhe Chen, Weiyun Wang, Hao Tian, Shenglong Ye, Zhangwei Gao, Erfei Cui, Wenwen Tong, et al. 2024. Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling (InternVL 2.5). arXiv preprint arXiv:2412.05271(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[9]
Guoxuan Chi, Zheng Yang, Chenshu Wu, Jingao Xu, Yuchong Gao, Yunhao Liu, and Tianyue He. 2024. RF-Diffusion: Radio Signal Generation via Time- Frequency Diffusion. InProceedings of the 30th Annual International Conference on Mobile Computing and Networking (MobiCom ’24). ACM, 77–92
2024
-
[10]
Wei Chow, Jiageng Mao, Boyi Li, Daniel Seita, Vitor Guizilini, and Yue Wang. 2025. PhysBench: Benchmarking and Enhancing Vision-Language Models for Physical World Understanding. InInternational Conference on Learning Representations (ICLR)
2025
-
[11]
Laura Dodds, Tara Boroushaki, Kaichen Zhou, and Fadel Adib. 2025. Non-Line- of-Sight 3D Object Reconstruction via mmWave Surface Normal Estimation. InProceedings of the 23rd Annual International Conference on Mobile Systems, Applications and Services (MobiSys ’25). ACM, 445–458
2025
-
[12]
K. Duan, Z. Zhu, and Z. Zou. 2025. Indoor FireRescue Radar: 4D Indoor Mil- limeter Wave Dataset and Analysis for Hazardous Environment Perception. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 18620–18627
2025
-
[13]
Guorong He, Shichao Chen, Dongheng Xu, Xianbin Chen, Yang Xie, Xiaohua Wang, and Dingyi Fang. 2023. Fusang: Graph-inspired Robust and Accurate Object Recognition on Commodity mmWave Devices. InProceedings of the 21st Annual International Conference on Mobile Systems, Applications and Services (MobiSys ’23). ACM, 489–502
2023
- [14]
-
[15]
2023.Recommendation ITU-R P.2040-4: Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz
International Telecommunication Union. 2023.Recommendation ITU-R P.2040-4: Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz. Technical Report. ITU-R
2023
-
[16]
Wenzel Jakob, Sébastien Speierer, Nicolas Roussel, Merlin Nimier-David, Delio Vicini, Tizian Zeltner, Baptiste Nicolet, Miguel Crespo, Vincent Leroy, and Ziyi Zhang. 2022. Mitsuba 3 Renderer. Version 3.x, https://mitsuba-renderer.org
2022
-
[17]
Maisy Lam, Joshua Herrera, Sayed Saad Afzal, Kaichen Zhou, and Fadel Adib
-
[18]
Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technolo- gies(2025)
MiNav: Autonomous Drone Navigation Indoors Using Millimeter-Waves. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technolo- gies(2025). doi:10.1145/3749464
-
[19]
Kai Ling, Running Zhao, et al. 2024. Uranus: Empowering Generalized Gesture Recognition with Mobility through Generating Large-scale mmWave Radar Data.Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies8, 4 (2024). doi:10.1145/3699754
-
[20]
Stankovic, Niki Trigoni, and Andrew Markham
Chris Xiaoxuan Lu, Stefano Rosa, Peijun Zhao, Bing Wang, Changhao Chen, John A. Stankovic, Niki Trigoni, and Andrew Markham. 2020. See Through Smoke: Robust Indoor Mapping with Low-cost mmWave Radar. InProceedings of the 18th International Conference on Mobile Systems, Applications, and Services (MobiSys ’20)
2020
-
[21]
Pushkal Mishra, Satyam Srivastava, Jerry Li, Kshitiz Bansal, and Dinesh Bharadia
-
[22]
InProceedings of the 23rd ACM Conference on Embedded Networked Sensor Systems (SenSys ’25)
Demo Abstract: C-Shenron: A Realistic Radar Simulation Framework for CARLA. InProceedings of the 23rd ACM Conference on Embedded Networked Sensor Systems (SenSys ’25). ACM, 726–727. doi:10.1145/3715014.3724379
-
[23]
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, Gretchen Krueger, and Ilya Sutskever. 2021. Learning Transferable Visual Models From Natural Language Supervision. InProceedings of the 38th International Conference on Machine Learning (ICML)
2021
-
[24]
Remcom, Inc. 2024. Wireless InSite Propagation Software. https://www.remcom. com/wireless-insite-em-propagation-software
2024
-
[25]
Christian Schöffmann, Barnaba Ubezio, Christoph Böhm, Stephan Mühlbacher- Karrer, and Hubert Zangl. 2021. Virtual Radar: Real-Time Millimeter-Wave Radar Sensor Simulation for Perception-Driven Robotics.IEEE Robotics and Automation Letters6, 3 (2021), 4704–4711. doi:10.1109/LRA.2021.3068916
-
[26]
Emerson Sie, Xinyu Wu, Heyu Guo, and Deepak Vasisht. 2024. Radarize: Enhanc- ing Radar SLAM with Generalizable Doppler-Based Odometry. InProceedings of the 22nd Annual International Conference on Mobile Systems, Applications and Services (MobiSys ’24)
2024
-
[27]
The MathWorks, Inc. 2024. Radar Toolbox. https://www.mathworks.com/ products/radar.html
2024
-
[28]
Aaron van den Oord, Yazhe Li, and Oriol Vinyals. 2018. Representation Learning with Contrastive Predictive Coding.arXiv preprint arXiv:1807.03748(2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[29]
Ruicheng Wang, Sicheng Xu, Cassie Dai, Jianfeng Xiang, Yu Deng, Xin Tong, and Jiaolong Yang. 2025. MoGe: Unlocking Accurate Monocular Geometry Estimation for Open-Domain Images with Optimal Training Supervision. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
2025
-
[30]
Wenhui Wang, Furu Wei, Li Dong, Hangbo Bao, Nan Yang, and Ming Zhou. 2020. MiniLM: Deep Self-Attention Distillation for Task-Agnostic Compression of Pre-Trained Transformers. InAdvances in Neural Information Processing Systems (NeurIPS)
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.