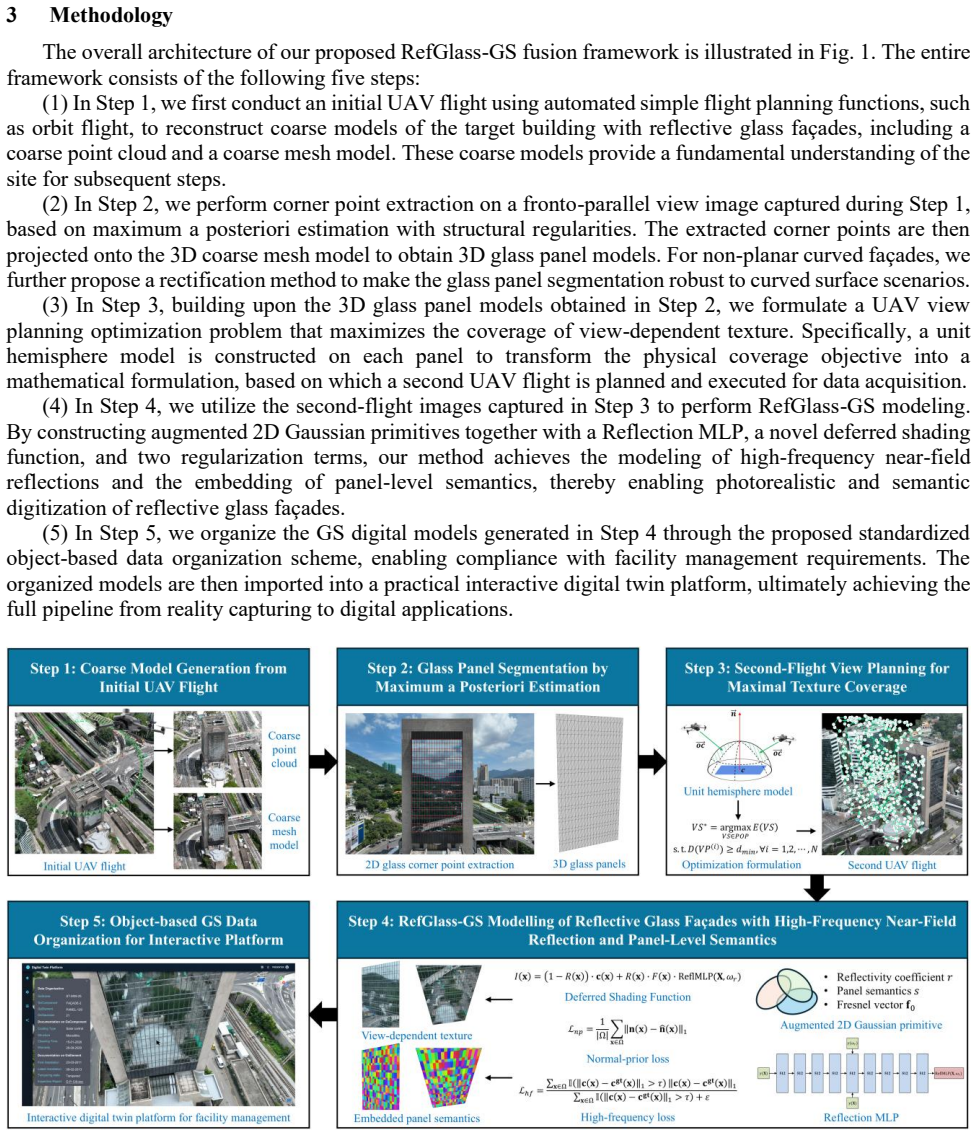
RefGlass-GS: A UAV-Enabled Fusion Framework for Photorealistic, Semantic and Interactive Digitization of Reflective Glass Facades via Gaussian Splatting
Pith reviewed 2026-06-30 10:17 UTC · model grok-4.3
The pith
RefGlass-GS combines UAV viewpoint planning with an enhanced Gaussian Splatting pipeline to achieve photorealistic rendering and instance-level segmentation of reflective glass facades.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a fusion of maximum a posteriori glass panel segmentation with structural regularities, UAV viewpoint planning that maximizes view-dependent coverage, and an optimized Gaussian Splatting model containing a Reflection MLP, deferred shading function, and two enhanced regularization terms produces superior photorealistic, semantic, and interactive digitization of reflective glass facades, with measured gains of 0.1927 mIoU in segmentation, 13.15 dB PSNR in view synthesis, and 5.08 dB PSNR in rendering over prior methods.
What carries the argument
The optimized Gaussian Splatting framework with a Reflection MLP, novel deferred shading function, and two enhanced regularization terms for modeling high-frequency near-field reflections.
If this is right
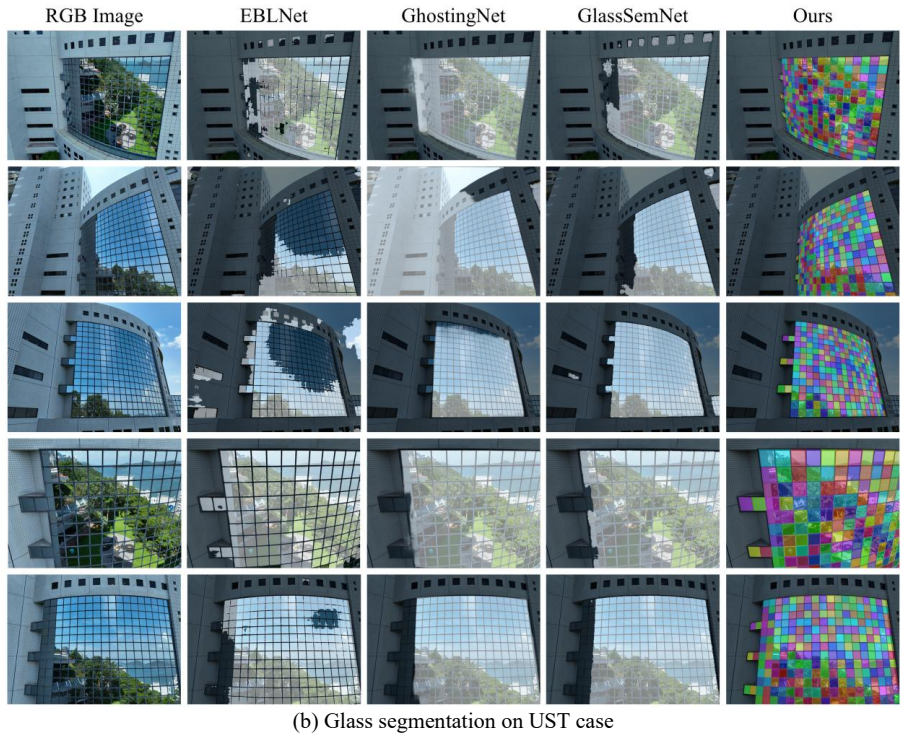
- The segmentation step achieves 0.1927 higher mIoU than state-of-the-art methods and is the only approach that extracts instance-level panels.
- The UAV viewpoint planning function improves novel view synthesis PSNR by 13.15 dB over commercially used nap-of-the-object paths.
- The full RefGlass-GS modeling pipeline yields an average 5.08 dB PSNR gain over existing Gaussian Splatting techniques on reflective scenes.
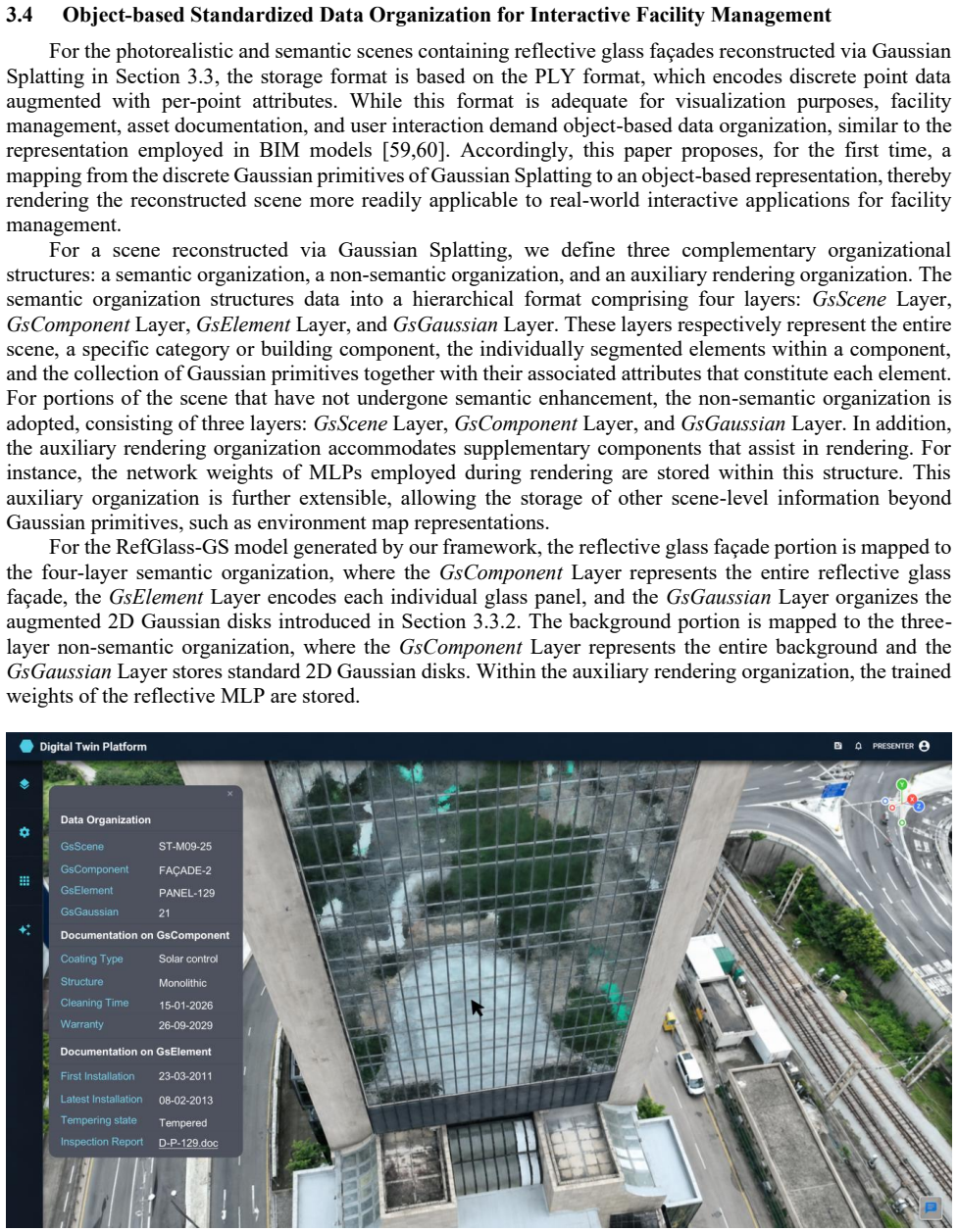
- The standardized data organization converts the representations into object-based models that support interactive facility management on digital twin platforms.
Where Pith is reading between the lines
- The viewpoint planning objective could be adapted for other view-dependent phenomena such as specular highlights on vehicles.
- The object-based output format may enable direct linkage between rendered views and maintenance databases without additional manual labeling.
- The Reflection MLP component might transfer to modeling other near-field reflective effects in non-building environments.
Load-bearing premise
The segmentation method based on maximum a posteriori estimation with structural regularities remains robust to severe reflection and background interference.
What would settle it
A controlled test on a reflective facade scene with strong background interference where the segmentation step fails to produce accurate individual panel masks would disprove the robustness claim.
Figures
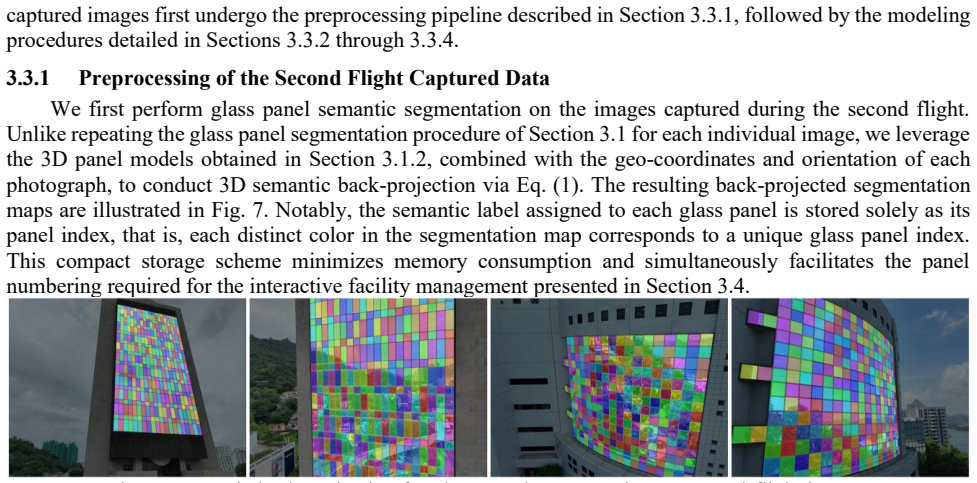
read the original abstract
Existing digitization of buildings with reflective glass facades suffers from geometric reconstruction distortion, unrealistic view-dependent texture rendering, and difficulties in object-based semantic enhancement. Therefore, we propose RefGlass-GS, a fusion framework that enables end-to-end UAV-based photorealistic, semantic, and interactive digitization of reflective glass facades. The contributions include: (1) proposing an individual glass panel segmentation method based on maximum a posteriori estimation with structural regularities, robust to severe reflection and background interference; (2) formulating a UAV viewpoint planning optimization function that maximizes the coverage of view-dependent appearance for sufficient data capture; (3) developing an optimized Gaussian Splatting framework with a Reflection MLP, a novel deferred shading function, and two enhanced regularization terms for effective modeling of high-frequency near-field reflections; (4) introducing a standardized data organization paradigm for structuring GS-based representations into object-based models, facilitating interactive facility management on digital twin platforms. Experiments on real-world reflective glass facade scenes validate the effectiveness and superiority of the proposed method. Specifically, the glass panel segmentation achieves an improvement of 0.1927 in mIoU over SOTA methods, and only our method enables instance-level panel extraction. The UAV view planning improves novel view synthesis for reflective facades by 13.15 dB in PSNR compared to commercially used nap-of-the-object planning methods. The RefGlass-GS modeling outperforms SOTA Gaussian Splatting approaches for reflective scenes with an average improvement of 5.08 dB in PSNR.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes RefGlass-GS, a UAV-enabled fusion framework for end-to-end photorealistic, semantic, and interactive digitization of reflective glass facades via Gaussian Splatting. Contributions include (1) a MAP estimation glass-panel segmentation method with structural regularities claimed to be robust to severe reflections, (2) an optimization function for UAV viewpoint planning to maximize view-dependent appearance coverage, (3) an optimized GS model incorporating a Reflection MLP, novel deferred shading, and two enhanced regularization terms for high-frequency near-field reflections, and (4) a standardized data organization paradigm to structure GS representations into object-based models for interactive digital-twin use. Experiments on real-world scenes report a 0.1927 mIoU gain in segmentation (with only this method enabling instance-level extraction), a 13.15 dB PSNR gain from the view planner versus nap-of-the-object baselines, and a 5.08 dB average PSNR gain versus SOTA GS methods for reflective scenes.
Significance. If the empirical improvements and segmentation robustness hold under rigorous validation, the work would advance digital-twin applications for reflective architectural surfaces by combining UAV planning, instance-level semantics, and reflection-aware GS modeling; the explicit integration of a Reflection MLP with deferred shading and the object-based data paradigm are concrete strengths that could enable downstream interactive facility management.
major comments (1)
- [Contribution (1)] Contribution (1) and associated experiments: the central claim that MAP estimation plus structural regularities remains robust to severe reflection and background interference is load-bearing for the instance-level extraction, 0.1927 mIoU gain, and downstream object-based GS modeling, yet the manuscript provides no ablation studies, error analysis, or quantitative results on the hardest interference regimes described in the problem statement, leaving the semantic and interactive claims unsupported.
minor comments (1)
- [Abstract] The abstract states concrete metric improvements but does not reference the specific tables, figures, or sections containing dataset descriptions, baseline implementations, or error bars; this should be added for verifiability even if the full experimental section exists.
Simulated Author's Rebuttal
We thank the referee for the constructive critique. The single major comment is addressed point-by-point below. We agree that additional targeted validation is warranted and will revise accordingly.
read point-by-point responses
-
Referee: [Contribution (1)] Contribution (1) and associated experiments: the central claim that MAP estimation plus structural regularities remains robust to severe reflection and background interference is load-bearing for the instance-level extraction, 0.1927 mIoU gain, and downstream object-based GS modeling, yet the manuscript provides no ablation studies, error analysis, or quantitative results on the hardest interference regimes described in the problem statement, leaving the semantic and interactive claims unsupported.
Authors: We accept the referee's assessment that the robustness claim under the most severe reflection and background conditions is central yet insufficiently supported by dedicated quantitative analysis. The current manuscript reports aggregate mIoU gains and qualitative instance-level results across real-world scenes, but does not isolate performance on the hardest interference subsets or provide ablations of the structural-regularity priors. In the revised version we will add: (i) an ablation table removing each structural regularity term in turn, (ii) error analysis (failure-case images and per-scene metrics) on the subset of views exhibiting the strongest reflections and background clutter, and (iii) quantitative mIoU and instance-extraction success rates restricted to those hardest regimes. These additions will directly substantiate the load-bearing claim. revision: yes
Circularity Check
No circularity: empirical framework with no derivations or self-referential reductions
full rationale
The paper proposes a multi-component framework (MAP segmentation with structural regularities, UAV view planning optimization, Reflection MLP + deferred shading in GS, and object-based data organization) whose claims rest entirely on reported experimental metrics (0.1927 mIoU gain, 13.15 dB and 5.08 dB PSNR improvements). No equations, fitted parameters presented as predictions, self-citation load-bearing uniqueness theorems, or ansatzes smuggled via prior work appear in the provided text. All load-bearing steps are externally falsifiable via the described real-world scene experiments rather than reducing to input definitions by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Glass panels exhibit detectable structural regularities that support MAP estimation despite reflections.
Reference graph
Works this paper leans on
-
[1]
Y. Lv, Y. Pang, L. Ju, W. Xu, Z. Liang, J. He, L. Zhang, Automating digitization of engineered slopes to support interactive digital twin visualization, Automation in Construction 181 (2026) 106564. https://doi.org/10.1016/j.autcon.2025.106564
-
[2]
V. Mousavi, M. Rashidi, G. Shayan, B. Samali, A data -driven digital twin model for bridge health monitoring using feature fusion and unsupervised deep learning, Information Fusion (2025) 103534. https://doi.org/10.1016/j.inffus.2025.103534
-
[3]
B. Wang, F. Lin, M. Li, Z. Liang, Z. Chen, M. Wang, J.C. Cheng, Informative as-built modeling as a foundation for digital twins based on fine -grained object recognition and object -aware scan -vs-BIM for MEP scenes, Advanced Engineering Informatics 65 (2025) 103382. https://doi.org/10.1016/j.aei.2025.103382 29
-
[4]
J.L. Schonberger, J. -M. Frahm, Structure -from-motion revisited, Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 4104-4113. https://doi.org/10.1109/CVPR.2016.445
-
[5]
C. Yin, H. Yue, Q. Han, D. Hu, Z. Liang, F. Lin, B. Sun, B. Wang, M. Li, W. Yao, Industrial3D: A Terrestrial LiDAR Point Cloud Dataset and CrossParadigm Benchmark for Industrial Infrastructure, arXiv preprint arXiv:2603.28660 (2026). https://doi.org/10.48550/arXiv.2603.28660
-
[6]
H. He, X. Li, G. Cheng, J. Shi, Y. Tong, G. Meng, V. Prinet, L. Weng, Enhanced boundary learning for glass - like object segmentation, Proceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 15859-15868. https://doi.org/10.1109/ICCV48922.2021.01556
-
[7]
T. Yan, J. Gao, K. Xu, X. Zhu, H. Huang, H. Li, B. Wah, R.W. Lau, Ghostingnet: A novel approach for glass surface detection with ghosting cues, IEEE Transactions on Pattern Analysis and Machine Intelligence 47 (1) (2024) 323-337. https://doi.org/10.1109/TPAMI.2024.3463490
-
[8]
J. Lin, Y. -H. Yeung, R. Lau, Exploiting semantic relations for glass surface detection, Advances in Neural Information Processing Systems 35 (2022) 22490-22504. https://openreview.net/forum?id=WrIrYMCZgbb
2022
-
[9]
J.C.F. Chan, P.K. -Y. WONG, X. Guo, Z. Liang, Y. Wu, J.C. Cheng, Enhancing Vision -Language Model for Construction Safety Inspection via Visually Grounded Reasoning and Reinforcement Learning, Available at SSRN 6294267. https://dx.doi.org/10.2139/ssrn.6294267
-
[10]
B. Mildenhall, P.P. Srinivasan, M. Tancik, J.T. Barron, R. Ramamoorthi, R. Ng, NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis, European Conference on Computer Vision, Springer, 2020, pp. 405-421. https://doi.org/10.1007/978-3-030-58452-8_24
-
[11]
3D Gaussian Splatting for Real-Time Radiance Field Rendering,
B. Kerbl, G. Kopanas, T. Leimkü hler, G. Drettakis, 3D Gaussian Splatting for Real -Time Radiance Field Rendering, ACM Transactions on Graphics 42 (4) (2023) 1-14. https://doi.org/10.1145/3592433
-
[12]
Z. Li, S. Yao, Y. Chu, A.F. Garcia -Fernandez, Y. Yue, W. Ding, X. Zhu, Mvg -splatting: Multi-view guided gaussian splatting with adaptive quantile-based geometric consistency densification, Information Fusion (2025) 103540. https://doi.org/10.1016/j.inffus.2025.103540
-
[13]
Wenliang Zhao, Lujia Bai, Yongming Rao, Jie Zhou, and Jiwen Lu
Y. Jiang, J. Tu, Y. Liu, X. Gao, X. Long, W. Wang, Y. Ma, Gaussianshader: 3d gaussian splatting with shading functions for reflective surfaces, Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 5322-5332. https://doi.org/10.1109/CVPR52733.2024.00509
-
[14]
Y. Yao, Z. Zeng, C. Gu, X. Zhu, L. Zhang, Reflective Gaussian Splatting, The Thirteenth International Conference on Learning Representations, 2025. https://openreview.net/forum?id=xPxHQHDH2u
2025
-
[15]
K. Ye, Q. Hou, K. Zhou, 3d gaussian splatting with deferred reflection, ACM SIGGRAPH 2024 Conference Papers, 2024, pp. 1-10. https://doi.org/10.1145/3641519.3657456
-
[16]
C. Gu, X. Wei, Z. Zeng, Y. Yao, L. Zhang, Irgs: Inter-reflective gaussian splatting with 2d gaussian ray tracing, Proceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 10943 -10952. https://doi.org/10.1109/CVPR52734.2025.01022
-
[17]
Z. Liang, Z. Liang, M. Wang, L. Yang, J.C. Cheng, A Novel UAV View Planning Strategy for High Quality 3D Reconstruction of Irregular-Shaped Architecture, International Conference on Computing in Civil and Building Engineering, Springer, 2024, pp. 573-585. https://doi.org/10.1007/978-3-031-84208-5_42
-
[18]
R. Jin, Y. Gao, Y. Wang, Y. Wu, H. Lu, C. Xu, F. Gao, Gs -planner: A gaussian -splatting-based planning framework for active high -fidelity reconstruction, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2024, pp. 11202-11209. https://doi.org/10.1109/IROS58592.2024.10801715
-
[19]
S. Matarneh, F. Elghaish, F.P. Rahimian, N. Dawood, D. Edwards, Automated and interconnected facility management system: An open IFC cloud-based BIM solution, Automation in Construction 143 (2022) 104569. https://doi.org/10.1016/j.autcon.2022.104569
-
[20]
B. Huang, Z. Yu, A. Chen, A. Geiger, S. Gao, 2d gaussian splatting for geometrically accurate radiance fields, ACM SIGGRAPH 2024 conference papers, 2024, pp. 1-11. https://doi.org/10.1145/3641519.3657428
-
[21]
M. Ye, M. Danelljan, F. Yu, L. Ke, Gaussian grouping: Segment and edit anything in 3d scenes, European conference on computer vision, Springer, 2024, pp. 162-179. https://doi.org/10.1007/978-3-031-73397-0_10
-
[22]
InProceedings of the SIGGRAPH Asia 2025 Conference Papers (SA Conference Papers ’25)
A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead, A.C. Berg, W. -Y. Lo, Segment anything, Proceedings of the IEEE/CVF international conference on computer vision, 2023, pp. 4015-4026. https://doi.org/10.1109/ICCV51070.2023.00371
-
[23]
M. Qin, W. Li, J. Zhou, H. Wang, H. Pfister, Langsplat: 3d language gaussian splatting, Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 20051 -20060. https://doi.org/10.1109/CVPR52733.2024.01895 30
-
[24]
Z. Liang, J.C.F. Chan, J. Zhang, Z. Liang, B. Wang, M. Wang, J.C. Cheng, Multimodal LLM -driven language- embedded 3D gaussian splatting for semantic and realistic digitization of historical buildings, Automation in Construction 181 (2026) 106628. https://doi.org/10.1016/j.autcon.2025.106628
-
[25]
Radford, J.W
A. Radford, J.W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, Learning transferable visual models from natural language supervision, International conference on machine learning, PmLR, 2021, pp. 8748-8763. https://proceedings.mlr.press/v139/radford21a.html
2021
-
[26]
M. Caron, H. Touvron, I. Misra, H. Jé gou, J. Mairal, P. Bojanowski, A. Joulin, Emerging properties in self - supervised vision transformers, Proceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 9650-9660. https://doi.org/10.1109/ICCV48922.2021.00951
-
[27]
Zhang, J
W. Zhang, J. Tang, W. Zhang, Y. Fang, Y. -S. Liu, Z. Han, MaterialRefGS: Reflective Gaussian Splatting with Multi-view Consistent Material Inference, The Thirty -ninth Annual Conference on Neural Information Processing Systems, 2025. https://openreview.net/forum?id=I64ZLbUP6u
2025
-
[28]
J. Tang, F. Fei, Z. Li, X. Tang, S. Liu, Y. Chen, B. Huang, Z. Chen, X. Wu, B. Shi, SpecTRe -GS: Modeling Highly Specular Surfaces with Reflected Nearby Objects by Tracing Rays in 3D Gaussian Splatting, Proceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 16133 -16142. https://doi.org/10.1109/CVPR52734.2025.01504
-
[29]
Steering away from harm: An adaptive approach to defending vision language model against jailbreaks
Y. Zhang, A. Chen, Y. Wan, Z. Song, J. Yu, Y. Luo, W. Yang, Ref-gs: Directional factorization for 2d gaussian splatting, Proceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 26483 -26492. https://doi.org/10.1109/CVPR52734.2025.02466
-
[30]
H. Mei, X. Yang, Y. Wang, Y. Liu, S. He, Q. Zhang, X. Wei, R.W. Lau, Don't hit me! glass detection in real - world scenes, Proceedings of the IEEE/cvf conference on computer vision and pattern recognition, 2020, pp. 3687-3696. https://doi.org/10.1109/CVPR42600.2020.00374
-
[31]
K. Fan, C. Wang, Y. Wang, C. Wang, R. Yi, L. Ma, RFENet: towards reciprocal feature evolution for glass segmentation, Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence, 2023, pp. 717-725. https://doi.org/10.24963/ijcai.2023/80
-
[32]
J. Lin, Z. He, R.W. Lau, Rich context aggregation with reflection prior for glass surface detection, Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 13415 -13424. https://doi.org/10.1109/CVPR46437.2021.01321
-
[33]
M.E.M. Gonzales, L.C. Uy, J.P. Ilao, Designing a Lightweight Edge-Guided Convolutional Neural Network for Segmenting Mirrors and Reflective Surfaces, Proceedings of International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision, 2023. https://www.doi.org/10.24132/CSRN.3301.14
-
[34]
A.Y. Hassen, M. Arashpour, E. Abdi, Lightweight segmentation model for automated facade installation in high- rise buildings, Advanced Engineering Informatics 65 (2025) 103374. https://doi.org/10.1016/j.aei.2025.103374
-
[35]
D. Wu, L. Cheng, R. Li, P. Yang, X. Xu, X. Wang, C. -H. Lee, Automatic segmentation of curtain wall frame using a context collaboration pyramid network, Engineering Applications of Artificial Intelligence 133 (2024) 108309. https://doi.org/10.1016/j.engappai.2024.108309
-
[36]
Y. Tian, F. Lin, Y. Li, T. Zhang, Q. Zhang, X. Fu, J. Huang, X. Dai, Y. Wang, C. Tian, UAVs meet LLMs: Overviews and perspectives towards agentic low -altitude mobility, Information Fusion 122 (2025) 103158. https://doi.org/10.1016/j.inffus.2025.103158
-
[37]
Z. Liang, H. Li, H. Wu, P. Kok -Yiu Wong, F. Lin, Z. Liang, J.C. Cheng, A 3D Modeling Approach Based on UAV-Captured Low -Light Images, Computing in Civil Engineering 2024, pp. 680 -691. https://doi.org/10.1061/9780784486122.076
-
[38]
Z. Liang, L. Yang, Z. Liang, J.C.F. Chan, Z. Zhang, M. Wang, J.C. Cheng, Optimized UAV view planning for high-quality 3D reconstruction of buildings using a modified sparrow search algorithm, Advanced Engineering Informatics 65 (2025) 103344. https://doi.org/10.1016/j.aei.2025.103344
-
[39]
C. Peng, V. Isler, Adaptive view planning for aerial 3D reconstruction, 2019 International Conference on Robotics and Automation (ICRA), IEEE, 2019, pp. 2981-2987. https://doi.org/10.1109/ICRA.2019.8793532
-
[40]
Z. Shang, Z. Shen, Topology -based UAV path planning for multi -view stereo 3D reconstruction of complex structures, Complex & Intelligent Systems 9 (1) (2023) 909-926. https://doi.org/10.1007/s40747-022-00831-5
-
[41]
X. Zheng, F. Wang, Z. Li, A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction, ISPRS journal of photogrammetry and remote sensing 146 (2018) 483 -494. https://doi.org/10.1016/j.isprsjprs.2018.11.004
-
[42]
B. Hepp, M. Nieß ner, O. Hilliges, Plan3d: Viewpoint and trajectory optimization for aerial multi -view stereo reconstruction, ACM Transactions on Graphics (TOG) 38 (1) (2018) 1 -17. https://doi.org/10.1145/3233794 31
-
[43]
S. Zhang, C. Liu, N. Haala, Guided by model quality: UAV path planning for complete and precise 3D reconstruction of complex buildings, International Journal of Applied Earth Observation and Geoinformation 127 (2024) 103667. https://doi.org/10.1016/j.jag.2024.103667
-
[44]
F. Wang, Y. Zou, E. del Rey Castillo, Y. Ding, Z. Xu, H. Zhao, J.B. Lim, Automated UAV path -planning for high-quality photogrammetric 3D bridge reconstruction, Structure and Infrastructure Engineering 20 (10) (2024) 1595-1614. https://doi.org/10.1080/15732479.2022.2152840
-
[45]
X. Liu, W. Yi, P. Chen, Y. Tan, Flight path planning of UAV-driven refinement inspection for construction sites based on 3D reconstruction, Automation in Construction 177 (2025) 106360. https://doi.org/10.1016/j.autcon.2025.106360
-
[46]
Z. Xu, R. Jin, K. Wu, Y. Zhao, Z. Zhang, J. Zhao, F. Gao, Z. Gan, W. Ding, Hgs-planner: Hierarchical planning framework for active scene reconstruction using 3d gaussian splatting, 2025 IEEE International Conference on Robotics and Automation (ICRA), IEE E, 2025, pp. 14161 -14167. https://doi.org/10.1109/ICRA55743.2025.11127649
-
[47]
L. Jin, X. Zhong, Y. Pan, J. Behley, C. Stachniss, M. Popović, Activegs: Active scene reconstruction using gaussian splatting, IEEE Robotics and Automation Letters (2025). https://doi.org/10.1109/LRA.2025.3555149
-
[48]
Y. Li, Z. Kuang, T. Li, Q. Hao, Z. Yan, G. Zhou, S. Zhang, Activesplat: High -fidelity scene reconstruction through active gaussian splatting, IEEE Robotics and Automation Letters (2025). https://doi.org/10.1109/LRA.2025.3580331
-
[49]
C.-Y. Wu, Y. -C. Sun, C. -T. Lee, C. -H. Hsu, Optimally Planning Drone Trajectories to Capture 3D Gaussian Splatting Objects, International Conference on Multimedia Modeling, Springer, 2024, pp. 171 -185. https://doi.org/10.1007/978-981-96-2064-7_13
-
[50]
Z. Liang, X. Zhang, Z. Liang, B. Wang, M. Wang, J.C. Cheng, A Novel Framework for Generating Realistic and Semantic Digital Model of Reflective Glass Faç ades Using RefGlass -3DGS, Computing in Civil Engineering 2025: Computational and Intelligent Technolo gies, pp. 914 -923. https://doi.org/10.1061/9780784486436.098
-
[51]
G. Luká cs, R. Martin, D. Marshall, Faithful least-squares fitting of spheres, cylinders, cones and tori for reliable segmentation, European conference on computer vision, Springer, 1998, pp. 671 -686. https://doi.org/10.1007/BFb0055697
-
[52]
C. Galamhos, J. Matas, J. Kittler, Progressive probabilistic Hough transform for line detection, Proceedings. 1999 IEEE computer society conference on computer vision and pattern recognition (Cat. No PR00149), Vol. 1, IEEE, 1999, pp. 554-560. https://doi.org/10.1109/CVPR.1999.786993
-
[53]
K. Teeravech, M. Nagai, K. Honda, M. Dailey, Discovering repetitive patterns in facade images using a RANSAC-style algorithm, ISPRS journal of photogrammetry and remote sensing 92 (2014) 38 -53. https://doi.org/10.1016/j.isprsjprs.2014.02.018
-
[54]
Z. Wang, A.C. Bovik, H.R. Sheikh, E.P. Simoncelli, Image quality assessment: from error visibility to structural similarity, IEEE transactions on image processing 13 (4) (2004) 600 -612. https://doi.org/10.1109/TIP.2003.819861
-
[55]
M. Maboudi, M. Homaei, S. Song, S. Malihi, M. Saadatseresht, M. Gerke, A review on viewpoints and path planning for UAV -based 3-D reconstruction, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 16 (2023) 5026-5048. https://doi.org/10.1109/JSTARS.2023.3276427
-
[56]
J. Kennedy, R. Eberhart, Particle swarm optimization, Proceedings of ICNN'95 -international conference on neural networks, Vol. 4, ieee, 1995, pp. 1942-1948. https://doi.org/10.1109/ICNN.1995.488968
-
[57]
Rahaman, A
N. Rahaman, A. Baratin, D. Arpit, F. Draxler, M. Lin, F. Hamprecht, Y. Bengio, A. Courville, On the spectral bias of neural networks, International conference on machine learning, PMLR, 2019, pp. 5301 -5310. https://proceedings.mlr.press/v97/rahaman19a.html
2019
-
[58]
M. Tancik, P. Srinivasan, B. Mildenhall, S. Fridovich-Keil, N. Raghavan, U. Singhal, R. Ramamoorthi, J. Barron, R. Ng, Fourier features let networks learn high frequency functions in low dimensional domains, Advances in Neural Information Processing Syste ms 33 (2020) 7537 -7547. https://proceedings.neurips.cc/paper_files/paper/2020/file/55053683268957697...
-
[59]
B. Wang, F. Lin, M. Li, Z. Liang, H. Yue, Q. Wang, J.C. Cheng, Aligning as-built and as-designed: Local point cloud to BIM registration via hybrid visibility map encoding for construction digital twins, Automation in Construction 180 (2025) 106551. https://doi.org/10.1016/j.autcon.2025.106551
-
[60]
Z. He, Y. -H. Wang, J. Zhang, Generative AIBIM: An automatic and intelligent structural design pipeline integrating BIM and generative AI, Information Fusion 114 (2025) 102654. https://doi.org/10.1016/j.inffus.2024.102654 32
-
[61]
B. Wang, Z. Chen, M. Li, Q. Wang, C. Yin, J.C. Cheng, Omni-Scan2BIM: A ready-to-use Scan2BIM approach based on vision foundation models for MEP scenes, Automation in Construction 162 (2024) 105384. https://doi.org/10.1016/j.autcon.2024.105384
-
[62]
M. Zhao, J. Chen, S. Song, Y. Li, F. Wang, S. Wang, D. Liu, Proposition of UAV multi-angle nap-of-the-object image acquisition framework based on a quality evaluation system for a 3D real scene model of a high -steep rock slope, International Journal of Ap plied Earth Observation and Geoinformation 125 (2023) 103558. https://doi.org/10.1016/j.jag.2023.103558
-
[63]
R. Zhang, P. Isola, A.A. Efros, E. Shechtman, O. Wang, The unreasonable effectiveness of deep features as a perceptual metric, Proceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 586-595. https://doi.org/10.1109/CVPR.2018.00068
-
[64]
Z. Liang, X. Zhang, T. Li, J.C. Cheng, C. -K. Tang, TransmissiveGS: Residual -Guided Disentangled Gaussian Splatting for Transmissive Scene Reconstruction and Rendering, arXiv preprint arXiv:2605.10705 (2026). https://doi.org/10.48550/arXiv.2605.10705
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2605.10705 2026
-
[65]
UAV-Assisted Scan-to-Simulation for Landslides Using Physics-Informed Gaussian Splatting
Z. Liang, J.C. Cheng, UAV -Assisted Scan -to-Simulation for Landslides Using Physics -Informed Gaussian Splatting, arXiv preprint arXiv:2605.10715 (2026). https://doi.org/10.48550/arXiv.2605.10715
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2605.10715 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.