Approximation and Controllability of Nonlinear Control-Affine Systems via Semiautonomous Neural Ordinary Differential Equations
Pith reviewed 2026-06-30 02:42 UTC · model grok-4.3
The pith
Controlled SA-NODEs approximate trajectories of nonlinear control-affine systems uniformly on compact sets and preserve their approximate controllability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Controlled SA-NODEs, formed by extending semiautonomous neural ODEs to control-affine dynamics with time-independent trainable coefficients, uniformly approximate the flow of any nonlinear control-affine system on compact sets of initial conditions and controls. When the drift and control vector fields satisfy the stated Sobolev and Barron conditions, the approximation error admits the quantitative rate O(P^{-1/2} + Q^{-1/2}). The same construction preserves the approximate controllability property of the original system.
What carries the argument
Controlled semiautonomous neural ordinary differential equations (controlled SA-NODEs), which embed control-affine structure into a neural ODE while keeping trainable coefficients time-independent.
If this is right
- Approximate controllability of the true system is inherited by the neural model, so control designs based on the approximation remain valid for the original dynamics.
- The quantitative error bound scales with the number of parameters P and Q, giving explicit guarantees once network widths are chosen.
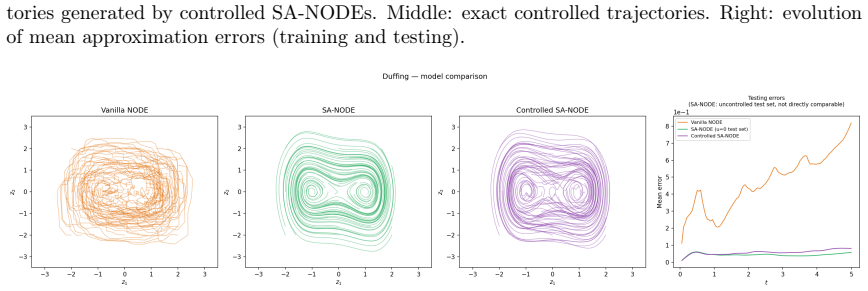
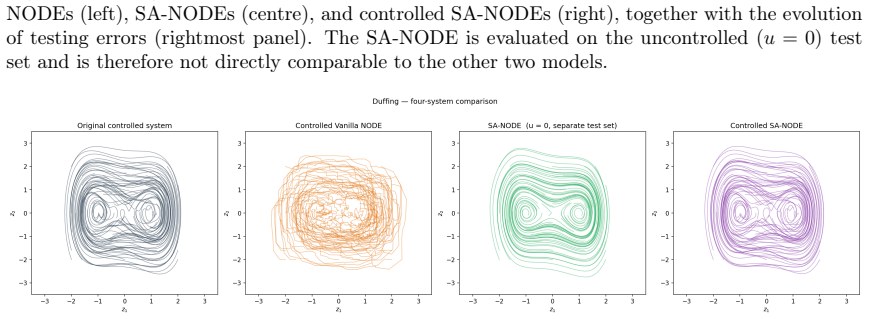
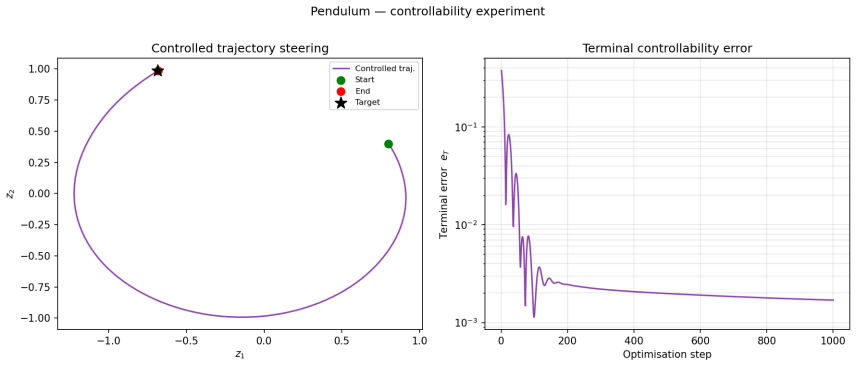
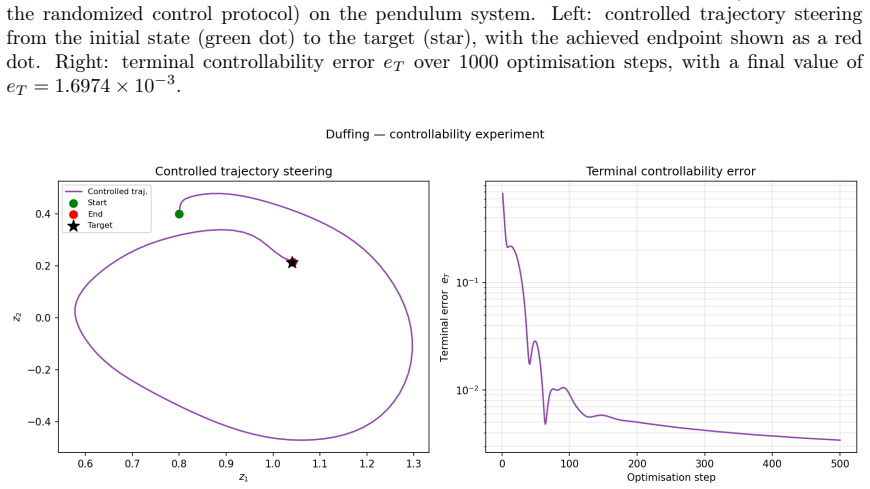
- Trajectory reconstruction on the pendulum and Duffing examples succeeds with significantly fewer parameters than classical neural ODEs.
- The framework applies directly to any control-affine system whose vector fields meet the regularity hypotheses.
Where Pith is reading between the lines
- The same construction might be adapted to systems with state-dependent control coefficients if the regularity assumptions can be relaxed.
- Because parameter count is reduced, the approach could scale more readily to high-dimensional or long-horizon control problems than dense neural ODEs.
- Preservation of controllability opens the possibility of using the learned model inside model-predictive or reinforcement-learning loops without separate controllability verification.
Load-bearing premise
The underlying dynamics must be control-affine and the drift and control vector fields must satisfy the Sobolev and Barron regularity conditions needed for the error bounds and controllability transfer.
What would settle it
An explicit control-affine system meeting the regularity assumptions whose trajectories on some compact set of initial conditions and controls cannot be approximated to arbitrary accuracy by any controlled SA-NODE, or for which the approximating model loses approximate controllability.
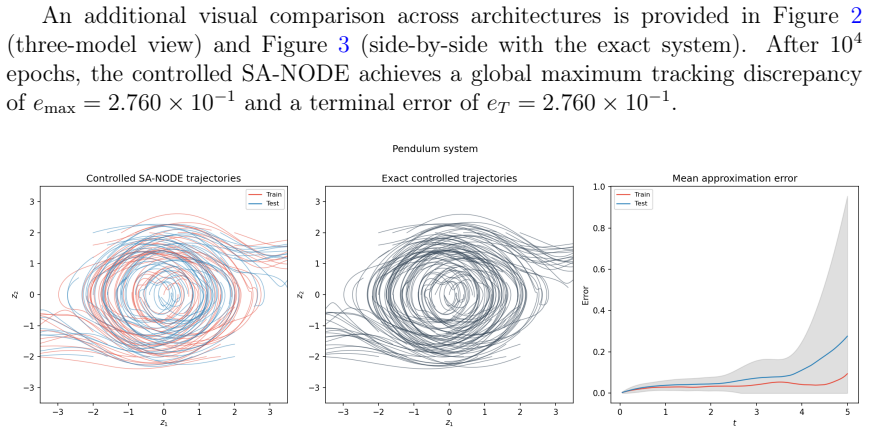
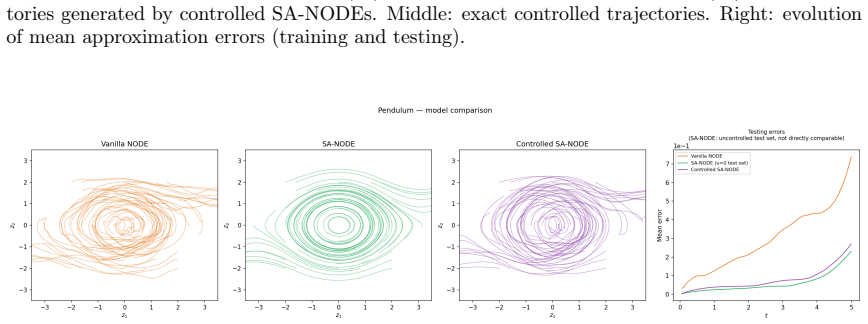
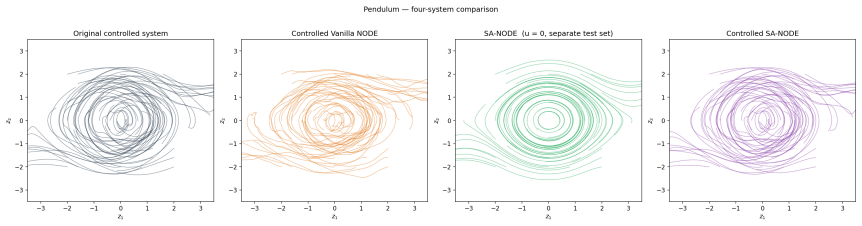
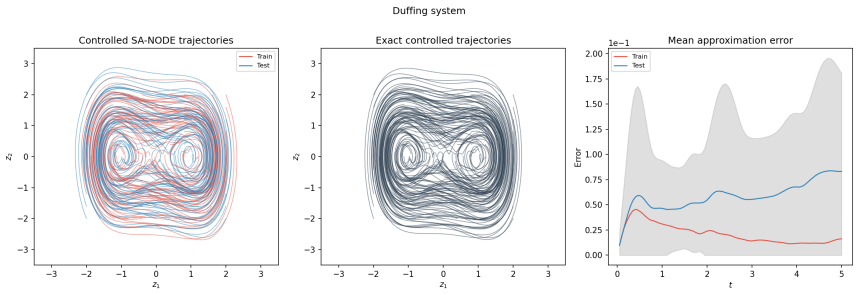
Figures
read the original abstract
In this paper, we introduce controlled semiautonomous neural ordinary differential equations (controlled SA-NODEs) for the approximation and learning of nonlinear controlled dynamical systems. The proposed framework extends semiautonomous neural ODEs to control-affine systems while preserving reduced parameter complexity through time-independent trainable coefficients. We establish a universal approximation theorem showing that controlled SA-NODEs approximate trajectories of nonlinear controlled systems uniformly on compact sets of initial conditions and admissible controls. Under additional Sobolev and Barron regularity assumptions, we derive quantitative approximation estimates of order $\mathcal{O}(P^{-1/2}+Q^{-1/2})$. We further prove that approximate controllability properties of the original nonlinear system are preserved under the controlled SA-NODE approximation. Numerical experiments on controlled pendulum and Duffing oscillator systems demonstrate that the proposed framework achieves accurate trajectory reconstruction and controllability performance with significantly fewer trainable parameters than classical neural ODE architectures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces controlled semiautonomous neural ODEs (SA-NODEs) for approximation and learning of nonlinear control-affine dynamical systems. It proves a universal approximation theorem establishing uniform trajectory approximation on compact sets of initial conditions and admissible controls, derives quantitative error bounds of order O(P^{-1/2} + Q^{-1/2}) under Sobolev and Barron regularity assumptions, shows that approximate controllability properties are preserved under the approximation, and validates the approach via numerical experiments on controlled pendulum and Duffing oscillator systems that achieve accurate reconstruction with significantly fewer trainable parameters than standard neural ODEs.
Significance. If the central theorems hold, the work supplies a parameter-efficient neural-ODE architecture with explicit approximation rates and controllability transfer for control-affine systems. This combination of universal approximation, quantitative Barron-type bounds, and preservation of controllability is a substantive contribution to the intersection of neural differential equations and nonlinear control theory.
major comments (2)
- [§3, Theorem 3.2] §3, Theorem 3.2 (quantitative estimates): the O(P^{-1/2} + Q^{-1/2}) rate is stated to follow from Barron-space estimates, but the proof must explicitly verify that the control-affine structure and the time-independent coefficients of the SA-NODE do not introduce additional factors that degrade the rate when the control enters the vector field.
- [§4, Theorem 4.1] §4, Theorem 4.1 (controllability preservation): the argument that approximate controllability is inherited relies on the trajectory error being small uniformly in controls; the section should contain an explicit estimate showing how the controllability radius or minimal time changes with the approximation error, rather than only invoking continuity of the flow.
minor comments (3)
- The statements of the main theorems should list the precise function-space assumptions (Sobolev index, Barron norm bound) in the theorem hypotheses rather than only in the surrounding text.
- [Numerical experiments] In the numerical section, report the exact number of trainable parameters for both the SA-NODE and the baseline neural ODE on each example so that the 'significantly fewer' claim can be verified quantitatively.
- [§2] Notation for the control input dimension and the semiautonomous parameter count (P, Q) should be introduced once in §2 and used consistently thereafter.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and the recommendation for minor revision. The two major comments are addressed point-by-point below; both can be resolved by adding explicit clarifications and quantitative estimates to the revised manuscript.
read point-by-point responses
-
Referee: [§3, Theorem 3.2] §3, Theorem 3.2 (quantitative estimates): the O(P^{-1/2} + Q^{-1/2}) rate is stated to follow from Barron-space estimates, but the proof must explicitly verify that the control-affine structure and the time-independent coefficients of the SA-NODE do not introduce additional factors that degrade the rate when the control enters the vector field.
Authors: We agree that an explicit verification is helpful. The proof of Theorem 3.2 approximates the drift vector field f and the control vector fields g_i separately in Barron space; because the control enters linearly and the admissible controls lie in a compact set, the standard Barron rates apply directly to each component without multiplicative factors depending on the control dimension. The time-independent coefficients of the SA-NODE are already accounted for in the semiautonomous construction and do not alter the Sobolev-to-Barron embedding constants. In the revision we will insert a short paragraph immediately after the statement of Theorem 3.2 that spells out this decomposition and confirms that no rate degradation occurs. revision: yes
-
Referee: [§4, Theorem 4.1] §4, Theorem 4.1 (controllability preservation): the argument that approximate controllability is inherited relies on the trajectory error being small uniformly in controls; the section should contain an explicit estimate showing how the controllability radius or minimal time changes with the approximation error, rather than only invoking continuity of the flow.
Authors: We accept the suggestion. While the uniform trajectory error bound already implies that controllability is preserved for sufficiently small approximation error, an explicit modulus would be clearer. Under the standing Lipschitz and compactness assumptions, the difference in reachable sets is bounded by the trajectory error ε; consequently the controllability radius changes by at most Cε and the minimal time by at most Cε for a constant C depending only on the Lipschitz constant of the vector field. We will add this quantitative statement, together with the short derivation, to the proof of Theorem 4.1. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper derives new theorems establishing universal approximation for controlled SA-NODEs on compact sets and preservation of approximate controllability for control-affine systems under Sobolev/Barron regularity. These results are conditioned on the stated structural and regularity assumptions and are presented as independent mathematical proofs rather than reductions to fitted inputs, self-definitions, or load-bearing self-citations. No quoted steps reduce by construction to the inputs, and the framework extends prior NODE ideas without circular renaming or ansatz smuggling.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The systems are nonlinear control-affine dynamical systems.
- domain assumption The functions satisfy Sobolev and Barron regularity assumptions.
Reference graph
Works this paper leans on
-
[1]
Neural ordinary differential equations.Advances in neural information process- ing systems, 31, 2018
Ricky TQ Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural ordinary differential equations.Advances in neural information process- ing systems, 31, 2018
2018
-
[2]
A proposal on machine learning via dynamical systems.Links, 2024:08–27, 2017
E Weinan, Yali Duan, Linghua Kong, and Min Guo. A proposal on machine learning via dynamical systems.Links, 2024:08–27, 2017
2024
-
[3]
Augmented neural odes
Emilien Dupont, Arnaud Doucet, and Yee Whye Teh. Augmented neural odes. Advances in neural information processing systems, 32, 2019
2019
-
[4]
Deep learning: An introduction for applied mathematicians.Siam review, 61(4):860–891, 2019
Catherine F Higham and Desmond J Higham. Deep learning: An introduction for applied mathematicians.Siam review, 61(4):860–891, 2019
2019
-
[5]
Stable architectures for deep neural networks
Eldad Haber and Lars Ruthotto. Stable architectures for deep neural networks. Inverse problems, 34(1):014004, 2018
2018
-
[6]
Cambridge University Press, 2022
Steven L Brunton and J Nathan Kutz.Data-driven science and engineering: Machine learning, dynamical systems, and control. Cambridge University Press, 2022
2022
-
[7]
Interpolation, approx- imation, and controllability of deep neural networks.SIAM Journal on Control and Optimization, 63(1):625–649, 2025
Jingpu Cheng, Qianxiao Li, Ting Lin, and Zuowei Shen. Interpolation, approx- imation, and controllability of deep neural networks.SIAM Journal on Control and Optimization, 63(1):625–649, 2025
2025
-
[8]
Neural ode control for classification, approximation, and transport.SIAM Review, 65(3):735–773, 2023
Domenec Ruiz-Balet and Enrique Zuazua. Neural ode control for classification, approximation, and transport.SIAM Review, 65(3):735–773, 2023. 44
2023
-
[9]
Takeshi Teshima, Koichi Tojo, Masahiro Ikeda, Isao Ishikawa, and Kenta Oono. Universal approximation property of neural ordinary differential equations. arXiv preprint arXiv:2012.02414, 2020
-
[10]
Constructive interpolation and generalization rates for neural ODEs: a control perspective
Antonio Álvarez-López, Lorenzo Liverani, and Enrique Zuazua. Constructive interpolation and generalization rates for neural odes: a control perspective. arXiv preprint arXiv:2606.00469, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[11]
Neural ode control for trajectory approximation of continuity equation
Karthik Elamvazhuthi, Bahman Gharesifard, Andrea L Bertozzi, and Stanley Osher. Neural ode control for trajectory approximation of continuity equation. IEEE Control Systems Letters, 6:3152–3157, 2022
2022
-
[12]
Universal approxi- mation of dynamical systems by semiautonomous neural odes and applications
Ziqian Li, Kang Liu, Lorenzo Liverani, and Enrique Zuazua. Universal approxi- mation of dynamical systems by semiautonomous neural odes and applications. SIAM Journal on Numerical Analysis, 64(1):193–223, 2026
2026
-
[13]
Learning on manifolds: Universal approximations properties using geometric controllability conditions for neural odes
Karthik Elamvazhuthi, Xuechen Zhang, Samet Oymak, and Fabio Pasqualetti. Learning on manifolds: Universal approximations properties using geometric controllability conditions for neural odes. InLearning for Dynamics and Control Conference, pages 1–11. PMLR, 2023
2023
-
[14]
Springer Science & Business Media, 2013
Eduardo D Sontag.Mathematical control theory: deterministic finite dimen- sional systems, volume 6. Springer Science & Business Media, 2013
2013
-
[15]
Coron.Control and Nonlinearity
J.M. Coron.Control and Nonlinearity. Mathematical surveys and monographs. American Mathematical Society, 2007. ISBN 9780821849187. URLhttps: //books.google.co.in/books?id=R5h9X2yYKqkC
2007
-
[16]
Slotine and W
J.J.E. Slotine and W. Li.Applied Nonlinear Control. Prentice Hall,
-
[17]
URLhttps://books.google.co.in/books?id= cwpRAAAAMAAJ
ISBN 9780130408907. URLhttps://books.google.co.in/books?id= cwpRAAAAMAAJ
-
[18]
Neuralcontrolled differential equations for irregular time series.Advances in neural information processing systems, 33:6696–6707, 2020
PatrickKidger, JamesMorrill, JamesFoster, andTerryLyons. Neuralcontrolled differential equations for irregular time series.Advances in neural information processing systems, 33:6696–6707, 2020
2020
-
[19]
Hamiltonian neural networks.Advances in neural information processing systems, 32, 2019
Samuel Greydanus, Misko Dzamba, and Jason Yosinski. Hamiltonian neural networks.Advances in neural information processing systems, 32, 2019
2019
-
[20]
Neural operator: 45 Learning maps between function spaces with applications to pdes.Journal of Machine Learning Research, 24(89):1–97, 2023
Nikola Kovachki, Zongyi Li, Burigede Liu, Kamyar Azizzadenesheli, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Neural operator: 45 Learning maps between function spaces with applications to pdes.Journal of Machine Learning Research, 24(89):1–97, 2023
2023
-
[21]
Interplay between depth and width for interpolation in neural odes.Neural Networks, 180:106640, 2024
Antonio Álvarez-López, Arselane Hadj Slimane, and Enrique Zuazua. Interplay between depth and width for interpolation in neural odes.Neural Networks, 180:106640, 2024
2024
-
[22]
Generalization bounds for neural ordinary differential equations and deep residual networks.Advances in neural information processing systems, 36:48918–48938, 2023
Pierre Marion. Generalization bounds for neural ordinary differential equations and deep residual networks.Advances in neural information processing systems, 36:48918–48938, 2023
2023
-
[23]
Deep neural networks, generic universal interpolation, and controlled odes.SIAM Journal on Mathe- matics of Data Science, 2(3):901–919, 2020
Christa Cuchiero, Martin Larsson, and Josef Teichmann. Deep neural networks, generic universal interpolation, and controlled odes.SIAM Journal on Mathe- matics of Data Science, 2(3):901–919, 2020
2020
-
[24]
Universal approximation bounds for superpositions of a sigmoidal function.IEEE Transactions on Information theory, 39(3):930–945, 2002
Andrew R Barron. Universal approximation bounds for superpositions of a sigmoidal function.IEEE Transactions on Information theory, 39(3):930–945, 2002
2002
-
[25]
Approximation theory of the mlp model in neural networks.Acta numerica, 8:143–195, 1999
Allan Pinkus. Approximation theory of the mlp model in neural networks.Acta numerica, 8:143–195, 1999
1999
-
[27]
Solving high-dimensional partial differential equations using deep learning.Proceedings of the National Academy of Sciences, 115(34):8505–8510, 2018
Jiequn Han, Arnulf Jentzen, and Weinan E. Solving high-dimensional partial differential equations using deep learning.Proceedings of the National Academy of Sciences, 115(34):8505–8510, 2018
2018
-
[28]
Optimal approximation of zonoids and uniform approxima- tion by shallow neural networks.Constructive Approximation, 62(2):441–469, 2025
Jonathan W Siegel. Optimal approximation of zonoids and uniform approxima- tion by shallow neural networks.Constructive Approximation, 62(2):441–469, 2025
2025
-
[29]
Sharp bounds on the approximation rates, metric entropy, and n-widths of shallow neural networks.Foundations of Com- putational Mathematics, 24(2):481–537, 2024
Jonathan W Siegel and Jinchao Xu. Sharp bounds on the approximation rates, metric entropy, and n-widths of shallow neural networks.Foundations of Com- putational Mathematics, 24(2):481–537, 2024
2024
-
[30]
Two-layer networks with the relu k activation function: Barron spaces and derivative ap- proximation.Numerische Mathematik, 156(1):319–344, 2024
Yuanyuan Li, Shuai Lu, Peter Mathé, and Sergei V Pereverzev. Two-layer networks with the relu k activation function: Barron spaces and derivative ap- proximation.Numerische Mathematik, 156(1):319–344, 2024. 46
2024
-
[31]
Spectral barron space for deep neural network approximation.SIAM Journal on Mathematics of Data Science, 7(3):1053–1076, 2025
Yulei Liao and Pingbing Ming. Spectral barron space for deep neural network approximation.SIAM Journal on Mathematics of Data Science, 7(3):1053–1076, 2025
2025
-
[32]
Neural operators for accelerating sci- entific simulations and design.Nature Reviews Physics, 6(5):320–328, 2024
Kamyar Azizzadenesheli, Nikola Kovachki, Zongyi Li, Miguel Liu-Schiaffini, Jean Kossaifi, and Anima Anandkumar. Neural operators for accelerating sci- entific simulations and design.Nature Reviews Physics, 6(5):320–328, 2024
2024
-
[33]
Laplace neural operator for solving differential equations.Nature Machine Intelligence, 6(6): 631–640, 2024
Qianying Cao, Somdatta Goswami, and George Em Karniadakis. Laplace neural operator for solving differential equations.Nature Machine Intelligence, 6(6): 631–640, 2024
2024
-
[34]
Spectral op- erator learning for parametric pdes without data reliance.Computer Methods in Applied Mechanics and Engineering, 420:116678, 2024
Junho Choi, Taehyun Yun, Namjung Kim, and Youngjoon Hong. Spectral op- erator learning for parametric pdes without data reliance.Computer Methods in Applied Mechanics and Engineering, 420:116678, 2024
2024
-
[35]
Neural operators for adaptive control of freeway traffic.Automatica, 182:112553, 2025
Kaijing Lv, Junmin Wang, Yihuai Zhang, and Huan Yu. Neural operators for adaptive control of freeway traffic.Automatica, 182:112553, 2025
2025
-
[36]
Improved gener- alization with deep neural operators for engineering systems: Path towards dig- ital twin.Engineering Applications of Artificial Intelligence, 131:107844, 2024
Kazuma Kobayashi, James Daniell, and Syed Bahauddin Alam. Improved gener- alization with deep neural operators for engineering systems: Path towards dig- ital twin.Engineering Applications of Artificial Intelligence, 131:107844, 2024
2024
-
[37]
Deep neural operator-driven real-time inference to enable digital twin solutions for nuclear energy systems
Kazuma Kobayashi and Syed Bahauddin Alam. Deep neural operator-driven real-time inference to enable digital twin solutions for nuclear energy systems. Scientific reports, 14(1):2101, 2024
2024
-
[38]
Salah A Faroughi, Nikhil M Pawar, Celio Fernandes, Maziar Raissi, Subasish Das, Nima K Kalantari, and Seyed Kourosh Mahjour. Physics-guided, physics- informed, and physics-encoded neural networks and operators in scientific com- puting: Fluid and solid mechanics.Journal of Computing and Information Science in Engineering, 24(4):040802, 2024
2024
-
[39]
The admm-pinns algorith- mic framework for nonsmooth pde-constrained optimization: a deep learning approach.SIAM Journal on Scientific Computing, 46(6):C659–C687, 2024
Yongcun Song, Xiaoming Yuan, and Hangrui Yue. The admm-pinns algorith- mic framework for nonsmooth pde-constrained optimization: a deep learning approach.SIAM Journal on Scientific Computing, 46(6):C659–C687, 2024
2024
-
[40]
The hard-constraint pinns for interface optimal control problems.SIAM Journal on Scientific Computing, 47(3):C601–C629, 2025
Ming-Chih Lai, Yongcun Song, Xiaoming Yuan, Hangrui Yue, and Tianyou Zeng. The hard-constraint pinns for interface optimal control problems.SIAM Journal on Scientific Computing, 47(3):C601–C629, 2025. 47
2025
-
[41]
Respecting causality for training physics-informed neural networks.Computer Methods in Applied Me- chanics and Engineering, 421:116813, 2024
Sifan Wang, Shyam Sankaran, and Paris Perdikaris. Respecting causality for training physics-informed neural networks.Computer Methods in Applied Me- chanics and Engineering, 421:116813, 2024
2024
-
[42]
Control of neural transport for nor- malising flows.Journal de Mathématiques Pures et Appliquées, 181:58–90, 2024
Domenec Ruiz-Balet and Enrique Zuazua. Control of neural transport for nor- malising flows.Journal de Mathématiques Pures et Appliquées, 181:58–90, 2024
2024
-
[43]
Deep residual learning for image recog- nition: A survey.Applied sciences, 12(18):8972, 2022
Muhammad Shafiq and Zhaoquan Gu. Deep residual learning for image recog- nition: A survey.Applied sciences, 12(18):8972, 2022
2022
-
[44]
Number 106 in CBMS Regional Conference Series in Mathematics
Terence Tao.Nonlinear dispersive equations: local and global analysis. Number 106 in CBMS Regional Conference Series in Mathematics. American Mathemat- ical Soc., 2006
2006
-
[45]
The barron space and the flow-induced function spaces for neural network models.Constructive Approximation, 55(1):369–406, 2022
Chao Ma, Lei Wu, et al. The barron space and the flow-induced function spaces for neural network models.Constructive Approximation, 55(1):369–406, 2022
2022
-
[46]
Klusowski and Andrew R
Jason M. Klusowski and Andrew R. Barron. Approximation by combinations of relu and squared relu ridge functions withℓ1 andℓ 0 controls.IEEE Transactions on Information Theory, 64(12):7649–7656, 2018. 48
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.