Hardware-Enforced Semantic Coordination for Safety-Critical Real-Time Autonomous Systems
Pith reviewed 2026-07-03 13:30 UTC · model grok-4.3
The pith
Mapping selected TB-CSPN mechanisms to FPGA primitives creates a hardware layer that enforces temporal synchronization, semantic gating, and bounded coordination in safety-critical autonomous systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
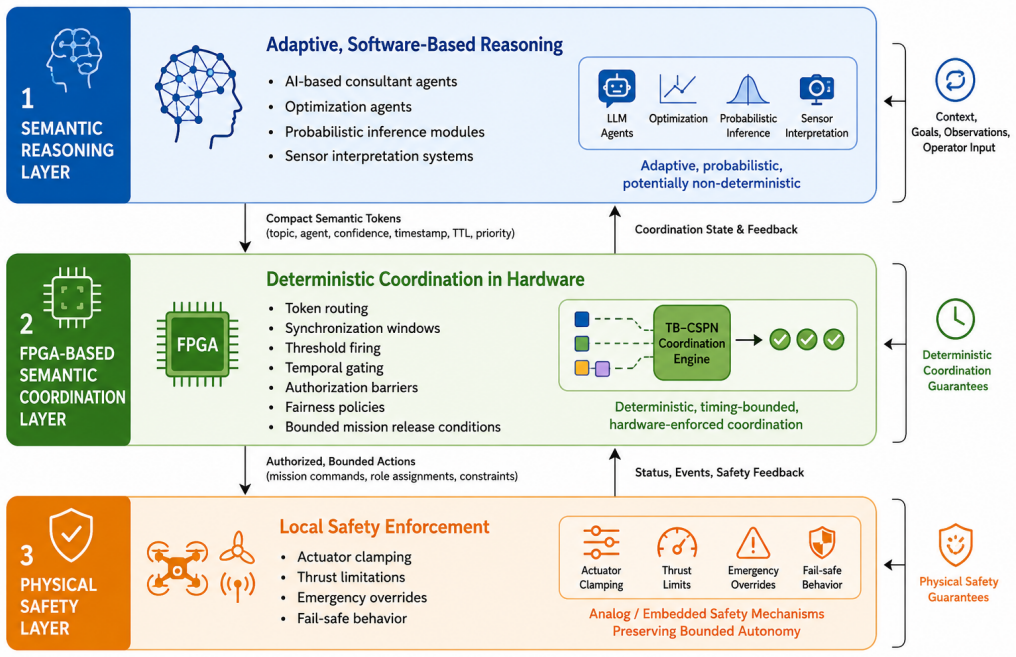
Selected TB-CSPN coordination mechanisms are mapped onto FPGA primitives, creating a hardware-native semantic coordination layer that enforces temporal synchronization, semantic gating, authorization constraints, and bounded coordination behavior directly in hardware. Semantic reasoning remains adaptive and software-driven, while the embedded coordination semantics become deterministic.
What carries the argument
Topic-Based Communication Space Petri Net (TB-CSPN) mechanisms mapped to FPGA primitives, which perform the enforcement of temporal and semantic constraints.
If this is right
- Temporal synchronization and authorization become hardware-enforced rather than software-mediated.
- Bounded coordination behavior holds even under concurrent operation of heterogeneous components.
- Safety-critical real-time systems gain deterministic guarantees without software-induced variability.
- Semantic reasoning can stay flexible in software while coordination enforcement is fixed in hardware.
Where Pith is reading between the lines
- Such a layer could be combined with existing FPGA-based sensor or actuator controllers to create end-to-end hardware safety paths.
- The separation of adaptive reasoning from fixed coordination might allow incremental upgrades of reasoning modules without re-verifying the coordination layer.
- If the mapping is faithful, similar hardware primitives could be explored for other coordination formalisms beyond TB-CSPN.
Load-bearing premise
The semantic coordination mechanisms of TB-CSPN can be faithfully implemented as FPGA primitives without losing essential flexibility or introducing new timing or correctness problems.
What would settle it
A concrete FPGA implementation of a TB-CSPN mechanism that either violates a timing bound the original software version satisfied or permits an unauthorized interaction that the software layer would have blocked.
Figures
read the original abstract
Recent advances in agentic AI are producing increasingly complex autonomous systems that integrate large language models, world models, optimization engines, specialized neural architectures, autonomous platforms, and human operators. While much current research focuses on improving reasoning capabilities, safety-critical real-time deployment also requires bounded and verifiable coordination among heterogeneous components operating concurrently under uncertainty. Software-mediated coordination presents fundamental limitations in domains where bounded latency, deterministic coordination, and enforceable safety guarantees are essential. Hence, we propose a hardware-enforced semantic coordination architecture in which selected coordination semantics are implemented directly at the hardware level via field-programmable gate arrays (FPGAs). The approach builds on the Topic-Based Communication Space Petri Net (TB-CSPN) framework, which separates semantic reasoning from interaction management. In this approach, selected TB-CSPN coordination mechanisms are mapped onto FPGA primitives, creating a hardware-native semantic coordination layer. Focus is not on acceleration, but on enforcing temporal synchronization, semantic gating, authorization constraints, and bounded coordination behavior directly in hardware. Semantic reasoning remains adaptive and software-driven, while embedded coordination semantics become deterministic.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hardware-enforced semantic coordination architecture for safety-critical real-time autonomous systems. It builds on the TB-CSPN framework by mapping selected coordination mechanisms (temporal synchronization, semantic gating, authorization constraints, and bounded behavior) onto FPGA primitives to create a deterministic hardware layer, while leaving adaptive semantic reasoning in software.
Significance. If the proposed mapping can be shown to preserve TB-CSPN semantics without introducing new timing or correctness issues, the architecture could provide stronger deterministic safety guarantees than software-only coordination in domains with strict latency and verifiability requirements. The manuscript, however, supplies no implementation, timing data, or verification, so the significance remains prospective.
major comments (2)
- [Abstract] Abstract and introduction: the central claim that 'selected TB-CSPN coordination mechanisms are mapped onto FPGA primitives, creating a hardware-native semantic coordination layer' is asserted without any explicit mapping, HDL fragments, timing analysis, or demonstration that the hardware layer correctly interacts with remaining software-driven components. This mapping step is load-bearing for all enforcement guarantees.
- [Introduction / Architecture description] The manuscript states that the approach 'focuses not on acceleration, but on enforcing temporal synchronization, semantic gating, authorization constraints, and bounded coordination behavior directly in hardware,' yet provides neither a concrete translation of any TB-CSPN primitive to FPGA elements nor an argument that the hardware realization avoids the flexibility or correctness problems the authors attribute to software mediation.
minor comments (2)
- [Abstract] The distinction between the proposed hardware layer and prior TB-CSPN software mechanisms could be stated more explicitly to avoid conflating the two.
- [Related work (if present)] No comparison is drawn to existing FPGA-based real-time coordination or hardware safety mechanisms in the literature; adding such references would clarify novelty.
Simulated Author's Rebuttal
We thank the referee for the insightful comments on our manuscript. The work is intended as a conceptual proposal for a hardware-enforced coordination architecture, and we will revise to better address the concerns about the level of detail in the mapping description.
read point-by-point responses
-
Referee: [Abstract] Abstract and introduction: the central claim that 'selected TB-CSPN coordination mechanisms are mapped onto FPGA primitives, creating a hardware-native semantic coordination layer' is asserted without any explicit mapping, HDL fragments, timing analysis, or demonstration that the hardware layer correctly interacts with remaining software-driven components. This mapping step is load-bearing for all enforcement guarantees.
Authors: We agree that the manuscript does not provide explicit mappings, HDL code, or timing analysis, as it focuses on outlining the high-level architecture rather than a detailed implementation. This is a limitation of the current presentation. In the revised manuscript, we will include a dedicated subsection describing a high-level mapping of key TB-CSPN primitives (such as places and transitions for synchronization and gating) to FPGA elements like state machines and logic gates. We will also elaborate on the interface between the hardware layer and software components to demonstrate correct interaction at the architectural level. Full verification and timing data remain outside the scope of this paper but will be noted as future work. revision: yes
-
Referee: [Introduction / Architecture description] The manuscript states that the approach 'focuses not on acceleration, but on enforcing temporal synchronization, semantic gating, authorization constraints, and bounded coordination behavior directly in hardware,' yet provides neither a concrete translation of any TB-CSPN primitive to FPGA elements nor an argument that the hardware realization avoids the flexibility or correctness problems the authors attribute to software mediation.
Authors: The referee is correct that no concrete translation is provided. The paper's contribution lies in identifying the benefits of hardware enforcement for these specific semantics. To address this, the revision will add an argument explaining how hardware can provide determinism (e.g., fixed execution paths without OS scheduling variability) that software cannot guarantee, while preserving the separation of concerns with software reasoning. A table or diagram outlining example mappings will be included to make the proposal more concrete without claiming a full implementation. revision: yes
Circularity Check
No circularity: proposal paper lacks derivations, equations, or fitted quantities
full rationale
The manuscript is a high-level architectural proposal for hardware mapping of TB-CSPN mechanisms to FPGA primitives. It contains no equations, no fitted parameters, no predictions of quantities, and no derivation chain that could reduce to its inputs. The reference to prior TB-CSPN work is background context for the new proposal rather than a load-bearing justification that forces the central claim. The central claim (hardware enforcement of selected semantics) is presented as a design intention without any self-referential reduction or renaming of prior results. This is a normal non-finding for a design/proposal paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
FPGA based military vehicle classification from drone-based video using deep learning,
S. Vasavi, D. S. Sowmya, C. Aishwarya, and W. Flores-Fuentes, “FPGA based military vehicle classification from drone-based video using deep learning,” in9th International Conference on Frontiers of Signal Processing, ICFSP 2024, Paris, France, September 12- 14, 2024. IEEE, 2024, pp. 32–37. [Online]. Available: https: //doi.org/10.1109/ICFSP62546.2024.10785445
-
[2]
Fpga-based UA V and UGV for search and rescue applications: A case study,
C. Huang, Y . Chen, C. Hsu, J. Yang, and C. Chang, “Fpga-based UA V and UGV for search and rescue applications: A case study,” Comput. Electr. Eng., vol. 119, p. 109491, 2024. [Online]. Available: https://doi.org/10.1016/j.compeleceng.2024.109491
-
[3]
Z. X. Wang, C. Dang, and L. Wang, “Personnel search and rescue detector based on reconfigurable FPGA accelerator: A lightweight multi-scale parallel drone-mounted detector,”IEEE Geosci. Remote. Sens. Lett., vol. 22, pp. 1–5, 2025. [Online]. Available: https://doi.org/10.1109/LGRS.2025.3550349
-
[4]
Fitnn: A low-resource fpga-based CNN accelerator for drones,
Z. Zhang, M. A. P. Mahmud, and A. Z. Kouzani, “Fitnn: A low-resource fpga-based CNN accelerator for drones,”IEEE Internet Things J., vol. 9, no. 21, pp. 21 357–21 369, 2022. [Online]. Available: https://doi.org/10.1109/JIOT.2022.3179016
-
[5]
An fpga-based accelerator design methodology for smart uavs in precision agriculture: A case study,
G. Bellocchi, D. Madroñal, A. Capotondi, F. Palumbo, and A. Marongiu, “An fpga-based accelerator design methodology for smart uavs in precision agriculture: A case study,”J. Syst. Archit., vol. 170, p. 103592,
-
[6]
Available: https://doi.org/10.1016/j.sysarc.2025.103592
[Online]. Available: https://doi.org/10.1016/j.sysarc.2025.103592
-
[7]
An FPGA smart camera implementation of segmentation models for drone wildfire imagery,
E. Guarduño-Martinezet al., “An FPGA smart camera implementation of segmentation models for drone wildfire imagery,” inAdvances in Computational Intelligence - 22nd Mexican International Conference on Artificial Intelligence, MICAI 2023, Yucatán, Mexico, November 13-18, 2023, ser. Lecture Notes in Computer Science, H. Calvo, L. Martínez- Villaseñor, and H...
-
[8]
Guarded swarms: Hybrid digital–analog coordination for AI–robot systems,
U. M. Borghoff, P. Bottoni, and R. Pareschi, “Guarded swarms: Hybrid digital–analog coordination for AI–robot systems,” inProceedings of the IEEE International Workshop on Technologies for Defense and Security (TechDefense), Rome, Italy, November 5–7, 2025, 2025, pp. 289–294
2025
-
[9]
Integrating blockchain for enhanced coordination and security in semi-centralized robotic swarms,
A. Carovilla, R. Pareschi, and F. Salzano, “Integrating blockchain for enhanced coordination and security in semi-centralized robotic swarms,” inProceedings of the IEEE International Workshop on Technologies for Defense and Security (TechDefense), Rome, Italy, November 20–22, 2023, 2023, pp. 95–99. [Online]. Available: https://doi.org/10.1109/TechDefense5...
-
[10]
Towards secure and resilient unmanned aerial vehicles swarm network based on blockchain,
X. Zhou, L. Yang, L. MA, and H. He, “Towards secure and resilient unmanned aerial vehicles swarm network based on blockchain,”IET Blockchain, vol. 4, no. S1, pp. 483–493, 2024. [Online]. Available: https://doi.org/10.1049/blc2.12050
-
[11]
Human-artificial interaction in the age of agentic AI: A system-theoretical approach,
U. M. Borghoff, P. Bottoni, and R. Pareschi, “Human-artificial interaction in the age of agentic AI: A system-theoretical approach,” Frontiers in Human Dynamics, vol. 7: 1579166, pp. 1–16, 2025. [Online]. Available: https://doi.org/10.3389/fhumd.2025.1579166
-
[12]
M. J. Wooldridge,Introduction to Multiagent Systems. Wiley: West Sussex, England, 2002
2002
-
[13]
Beyond human and machine: An architecture and methodology guideline for Centaurian design,
R. Pareschi, “Beyond human and machine: An architecture and methodology guideline for Centaurian design,”Sci, vol. 6(4): 71, 2024. [Online]. Available: https://doi.org/10.3390/sci6040071
-
[14]
U. M. Borghoff, P. Bottoni, and R. Pareschi, “An organizational theory for multi-agent interactions integrating human agents, LLMs, and specialized AI,”Discover Computing, vol. 28(1): 138, pp. 1–35, 2025. [Online]. Available: https://doi.org/10.1007/s10791-025-09667-2
-
[15]
K. Jensen and L. M. Kristensen,Coloured Petri Nets - Modelling and Validation of Concurrent Systems. Springer, 2009. [Online]. Available: https://doi.org/10.1007/b95112
-
[16]
Beyond prompt chaining: The TB-CSPN architecture for agentic AI,
U. M. Borghoff, P. Bottoni, and R. Pareschi, “Beyond prompt chaining: The TB-CSPN architecture for agentic AI,”Future Internet, vol. 17(8): 363, pp. 1–27, 2025. [Online]. Available: https://doi.org/10.3390/ fi17080363
2025
-
[17]
Guarded swarms: Building trusted autonomy through digital intelligence and physical safeguards,
——, “Guarded swarms: Building trusted autonomy through digital intelligence and physical safeguards,”Future Internet, vol. 18(1): 64, pp. 1–30, 2026. [Online]. Available: https://doi.org/10.3390/fi18010064
-
[18]
A trust management concept for secure onboarding of military coalition drone swarms,
C. Lassfolk and H. Kari, “A trust management concept for secure onboarding of military coalition drone swarms,” inCyber Security: Policy and Technology, M. Lehto and P. Neittaanmäki, Eds. Springer, Cham, 2026, pp. 193–221. [Online]. Available: https://doi.org/10.1007/978-3-032-08890-1_9
-
[19]
R. J. Hall, “An internet of drones,”IEEE Internet Comput., vol. 20, no. 3, pp. 68–73, 2016. [Online]. Available: https: //doi.org/10.1109/MIC.2016.59
-
[20]
An extensive survey on the internet of drones,
P. Boccadoro, D. Striccoli, and L. A. Grieco, “An extensive survey on the internet of drones,”Ad Hoc Networks, vol. 122, p. 102600, 2021. [Online]. Available: https://doi.org/10.1016/J.ADHOC.2021.102600
-
[21]
N. S. Labib, M. R. Brust, G. Danoy, and P. Bouvry, “The rise of drones in internet of things: A survey on the evolution, prospects and challenges of unmanned aerial vehicles,”IEEE Access, vol. 9, pp. 115 466–115 487, 2021. [Online]. Available: https://doi.org/10.1109/ACCESS.2021.3104963
-
[22]
A trust-based mechanism for drones in smart cities,
G. Rathee, A. Kumar, C. A. Kerrache, and R. Iqbal, “A trust-based mechanism for drones in smart cities,”IET Smart Cities, vol. 4, no. 4, pp. 255–264, 2022. [Online]. Available: https://doi.org/10.1049/smc2.12039
-
[23]
A. S. Nair, S. M. Thampi, and J. V . V . P., “SoCoMNNet: A sociocognitive and memristive neural network-based context-aware GPS spoofing detection and mitigation in the internet of drones,” Veh. Commun., vol. 56, p. 100980, 2025. [Online]. Available: https://doi.org/10.1016/J.VEHCOM.2025.100980
-
[24]
A Q-learning- based two-layer cooperative intrusion detection for internet of drones system,
M. Wu, Z. Zhu, Y . Xia, Z. Yan, X. Zhu, and N. Ye, “A Q-learning- based two-layer cooperative intrusion detection for internet of drones system,”Drones, vol. 7, no. 8, p. 502, 2023. [Online]. Available: https://doi.org/10.3390/drones7080502
-
[25]
Trial by twin: Behavior-predictive trust in autonomous drone swarms,
D. Iqbal, H. Bangui, and B. Rossi, “Trial by twin: Behavior-predictive trust in autonomous drone swarms,” inCooperative Information Systems - 31st International Conference, CoopIS 2025, Marbella, Spain, October 20-22, 2025, Proceedings, ser. Lecture Notes in Computer Science, C. Cappiello, O. Hartig, M. Sellami, and A. Ouni, Eds., vol. 15535. Springer, 20...
-
[26]
Flight state recognition for UA V optical flow velocity measurement,
Y . Gong and X. Liu, “Flight state recognition for UA V optical flow velocity measurement,”Journal of Physics: Conference Series, vol. 2561, no. 1, p. 012025, 2023. [Online]. Available: https: //doi.org/10.1088/1742-6596/2561/1/012025
-
[27]
Artificial intelligence applied to drone control: A state of the art,
D. Caballero-Martin, J. M. Lopez-Guede, J. Estevez, and M. Graña, “Artificial intelligence applied to drone control: A state of the art,”Drones, vol. 8, no. 7, p. 296, 2024. [Online]. Available: https://doi.org/10.3390/drones8070296
-
[28]
Multi-UA V adaptive path planning using deep reinforcement learning,
J. Westheider, J. Rückin, and M. Popovi ´c, “Multi-UA V adaptive path planning using deep reinforcement learning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 649–656. [Online]. Available: https://doi.org/10.1109/IROS55552.2023. 10342516
-
[29]
A comprehensive survey of security and privacy in UA V systems,
B. Cordill, D. Fang, and S. Xu, “A comprehensive survey of security and privacy in UA V systems,”IEEE Access, vol. 13, 2025. [Online]. Available: https://doi.org/10.1109/ACCESS.2025.3583985
-
[30]
A. Yu, I. Kolotylo, H. A. Hashim, and A. E. E. Eltoukhy, “Electronic warfare cyberattacks, countermeasures, and modern defensive strategies of UA V avionics: A survey,”IEEE Access, vol. 13, 2025. [Online]. Available: https://doi.org/10.1109/ACCESS.2025.3561068
-
[31]
Toward intelligent distributed segment-based routing in 6G-era ultra-large-scale UA V swarm networks,
Z. Wang, H. Yao, T. Mai, R. Zhang, Z. Xiong, and D. Niyato, “Toward intelligent distributed segment-based routing in 6G-era ultra-large-scale UA V swarm networks,”IEEE Commun. Mag., vol. 63, no. 6, pp. 58–64,
-
[32]
Available: https://doi.org/10.1109/MCOM.001.2400583 6
[Online]. Available: https://doi.org/10.1109/MCOM.001.2400583 6
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.