A Bayesian latent Gaussian process framework for aerodynamic uncertainty quantification
Pith reviewed 2026-06-30 08:45 UTC · model grok-4.3
The pith
A latent Gaussian process extends Kennedy-O'Hagan calibration to marginalize input uncertainty and match output uncertainty statistics in aerodynamic predictions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
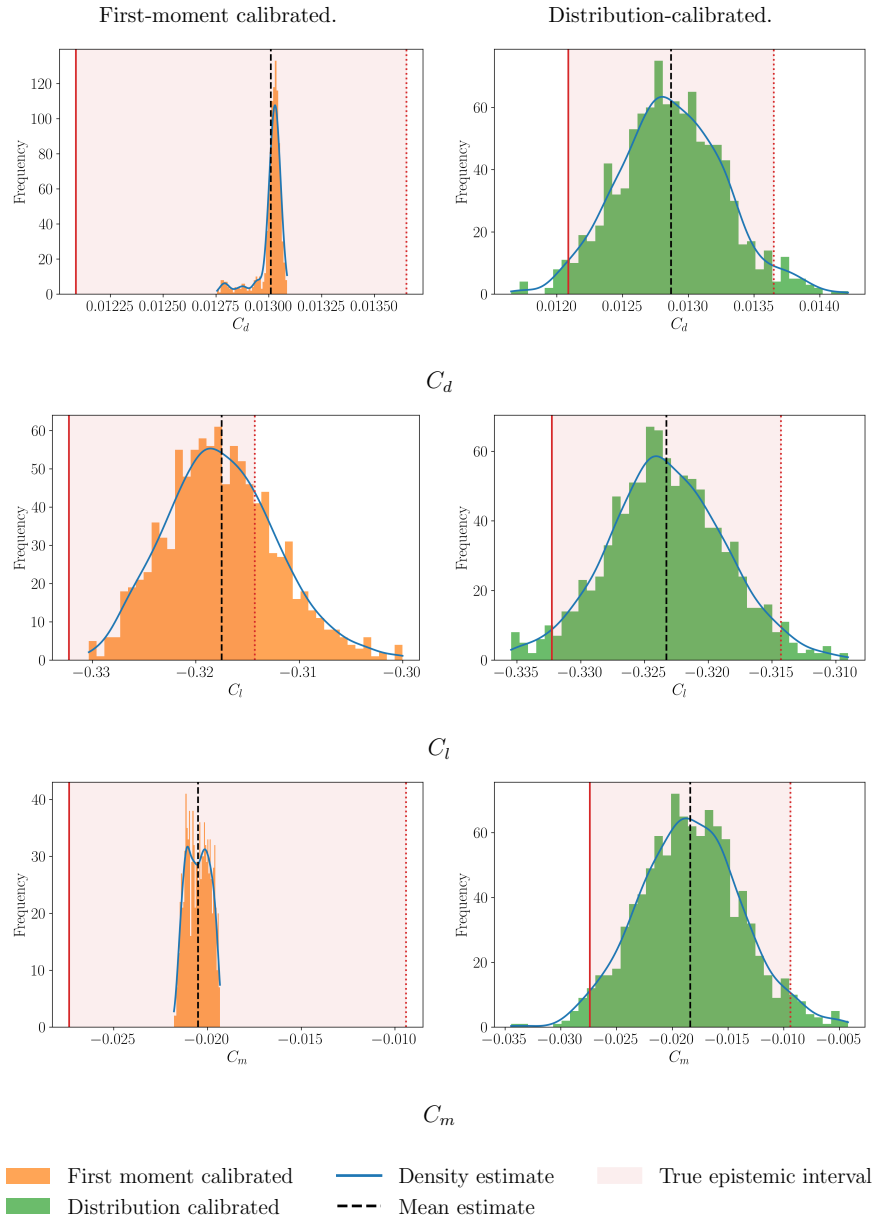
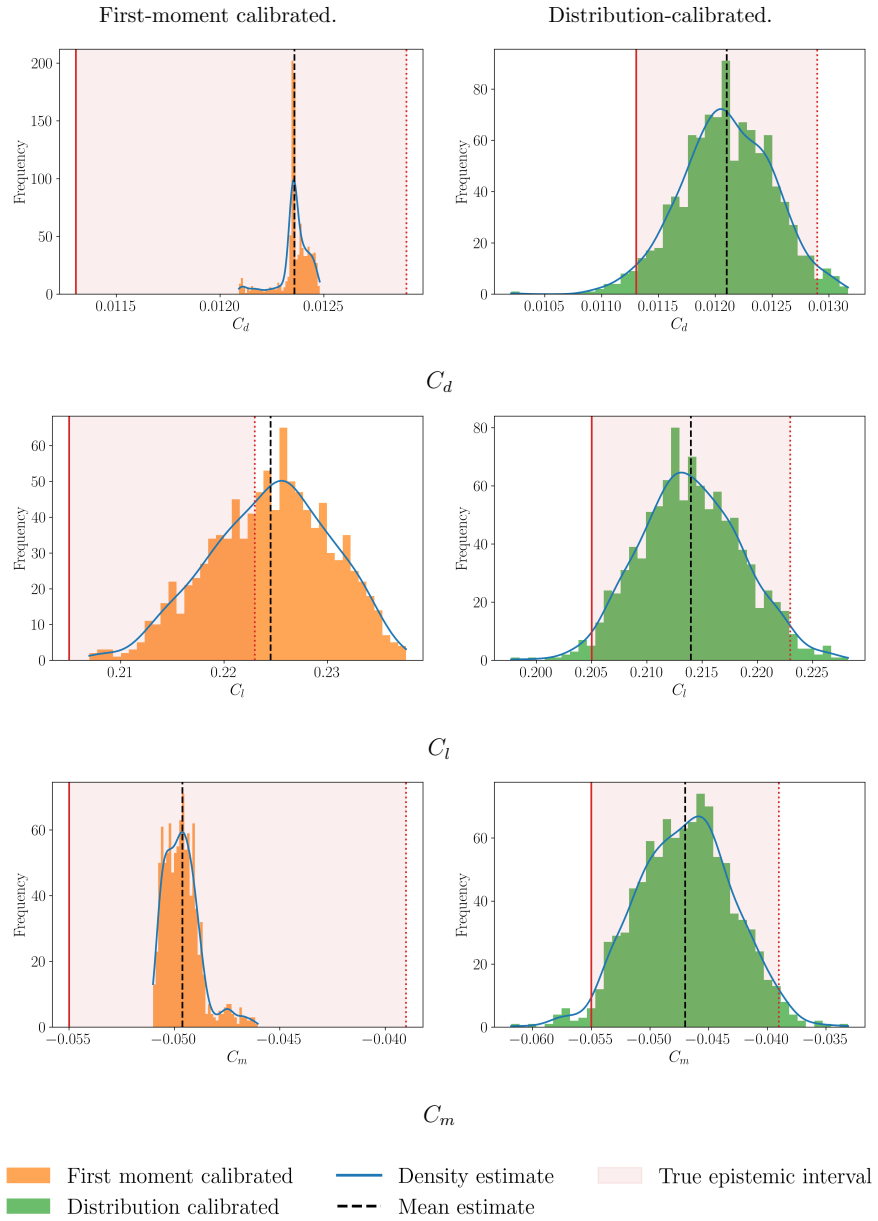
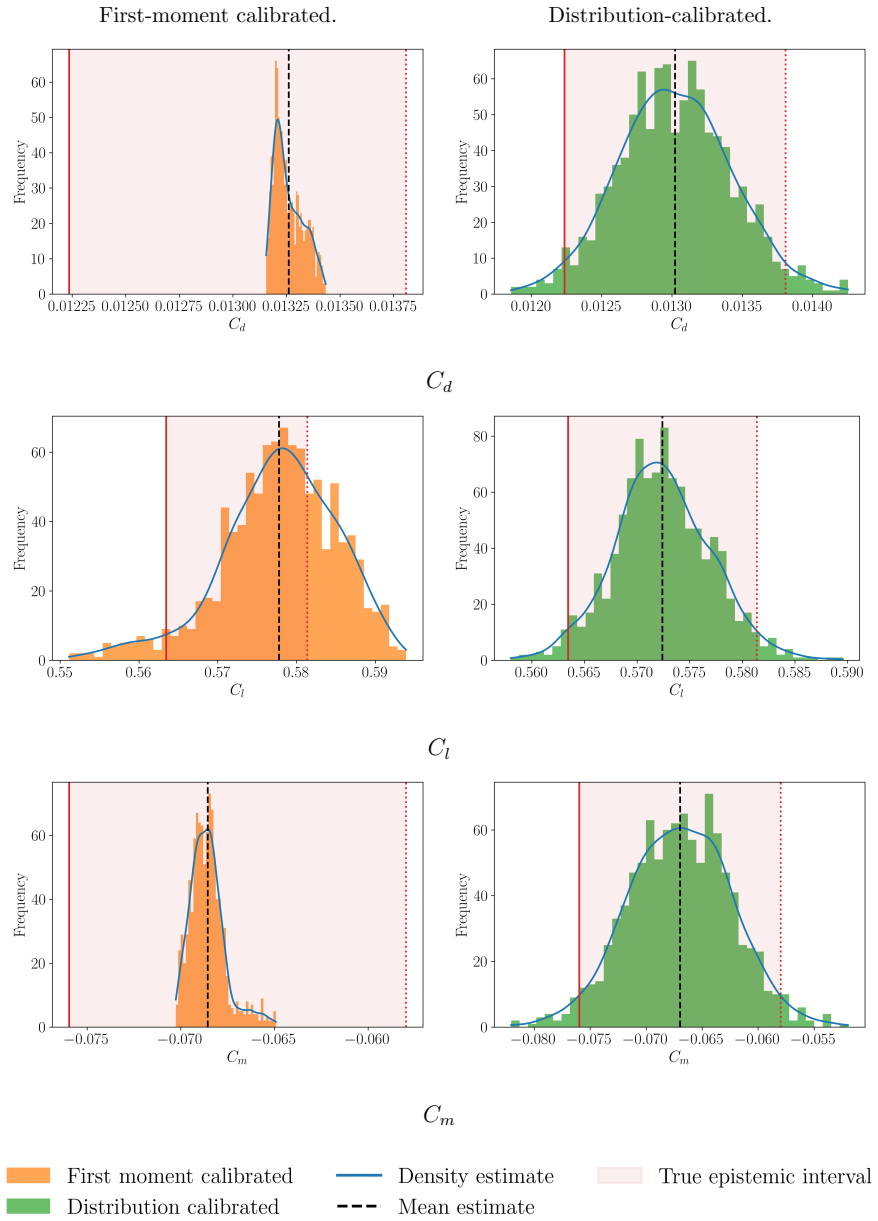
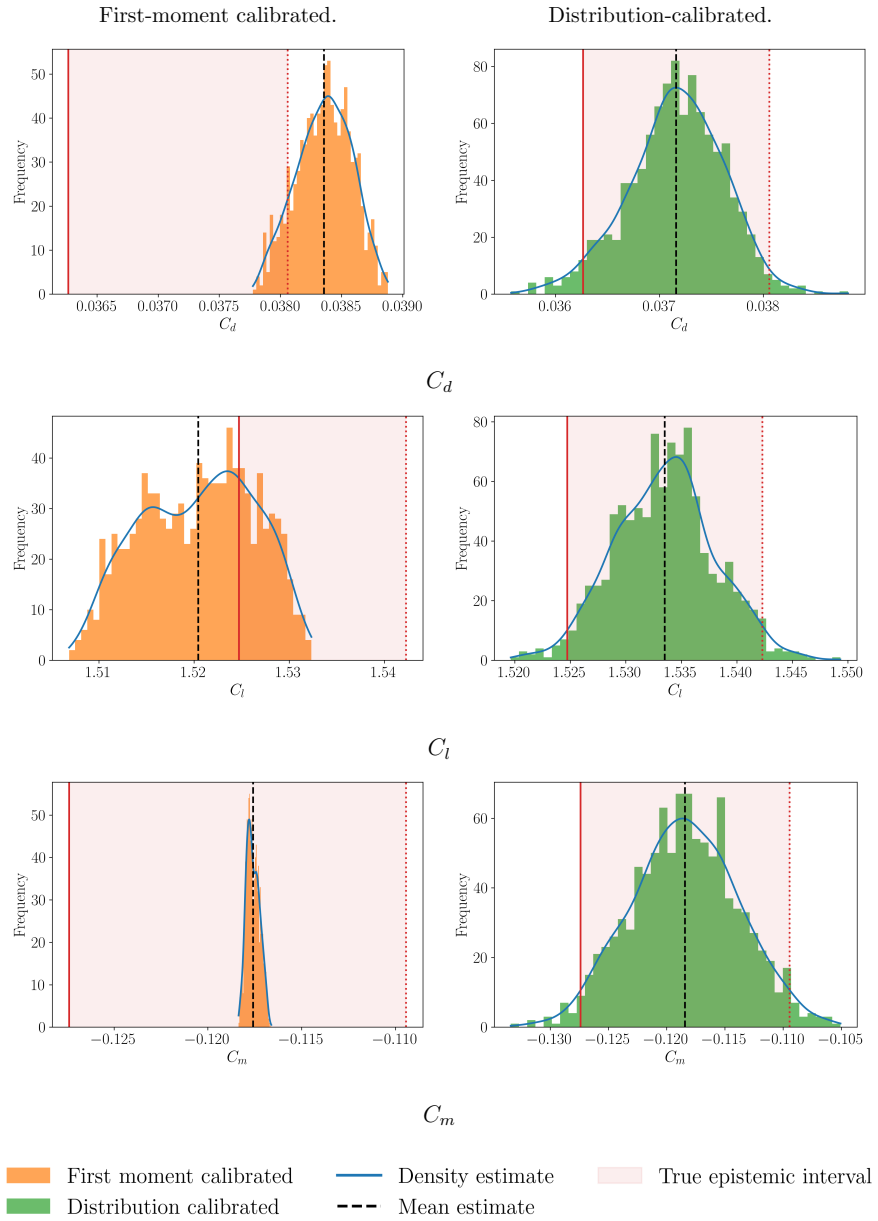
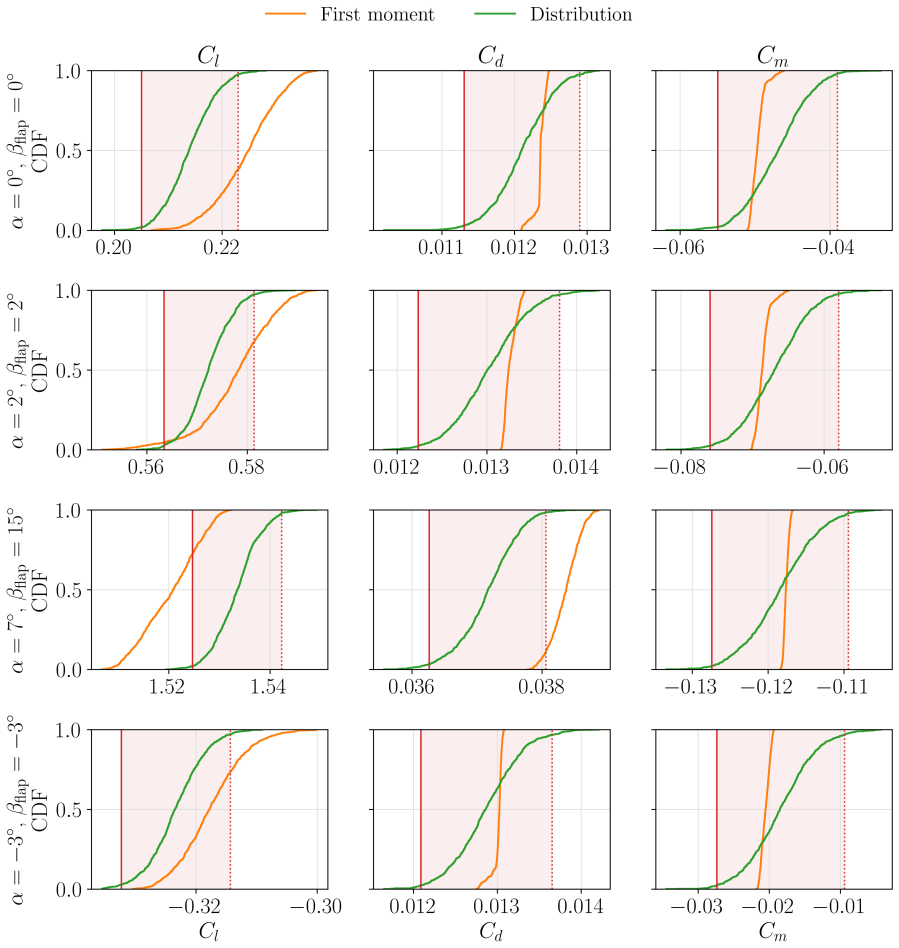
The authors claim that a Bayesian latent Gaussian process framework, built on the Kennedy-O'Hagan calibration, enables accurate quantification of uncertainty in aerodynamic coefficients by calibrating low-fidelity predictions to sparse measurements contaminated with input and output uncertainty, achieving coverage rates of 94.2-95.8% within 95% truth intervals even at extrapolative points.
What carries the argument
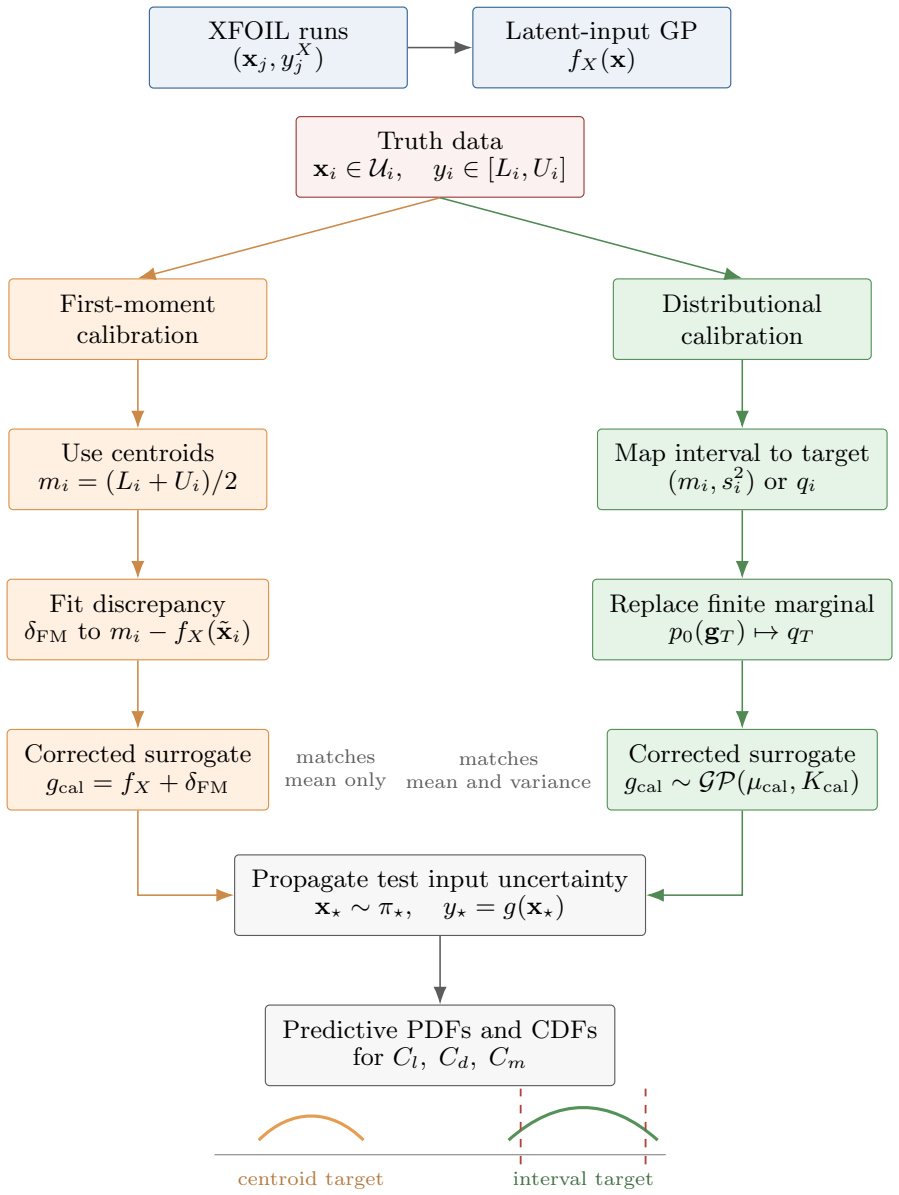
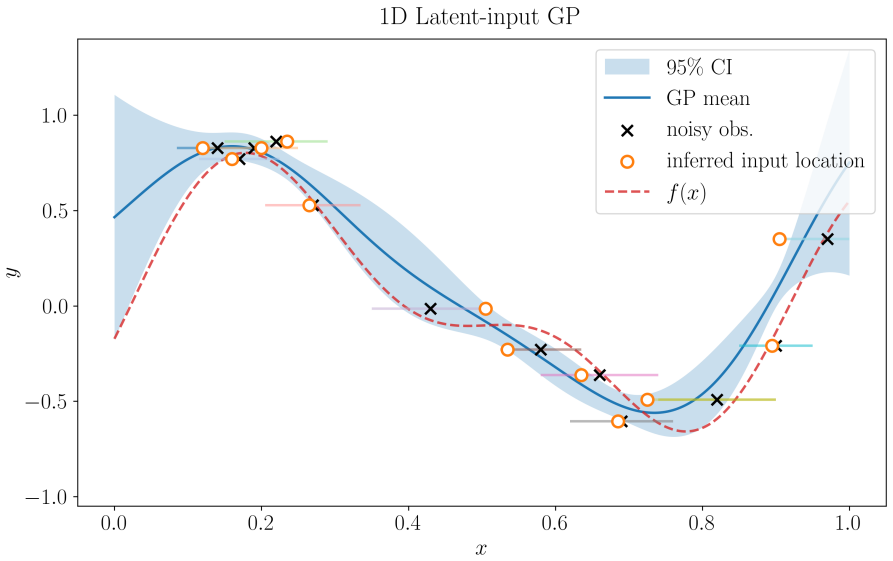
The Bayesian latent Gaussian process that marginalizes the calibrated surrogate over input uncertainty while matching the marginal mean and variance of the measured output uncertainty.
If this is right
- The surrogate model can predict uncertainty at new and extrapolative input settings with high accuracy.
- The approach allows calibration against sparse data with uncertainties in control inputs and responses.
- Validated predictions place nearly all samples inside true 95% intervals, confirming reliable uncertainty estimates.
- Low-fidelity data can be leveraged to reduce reliance on expensive direct simulations for uncertainty quantification.
Where Pith is reading between the lines
- This calibration technique might extend to other simulation-based fields where input parameters have measurement error.
- Combining latent processes with classical calibration could improve handling of noisy inputs in machine learning surrogates.
- Testing the method on different aerodynamic configurations or higher-dimensional parameter spaces would reveal its robustness.
Load-bearing premise
The Kennedy-O'Hagan calibration extended by a latent Gaussian process can marginalize over input uncertainty while matching the marginal mean and variance of output uncertainty in aerodynamic settings.
What would settle it
Observing that the model's predictive samples cover significantly fewer or more than 95% of the true uncertainty intervals in validation data would falsify the accuracy claim.
Figures
read the original abstract
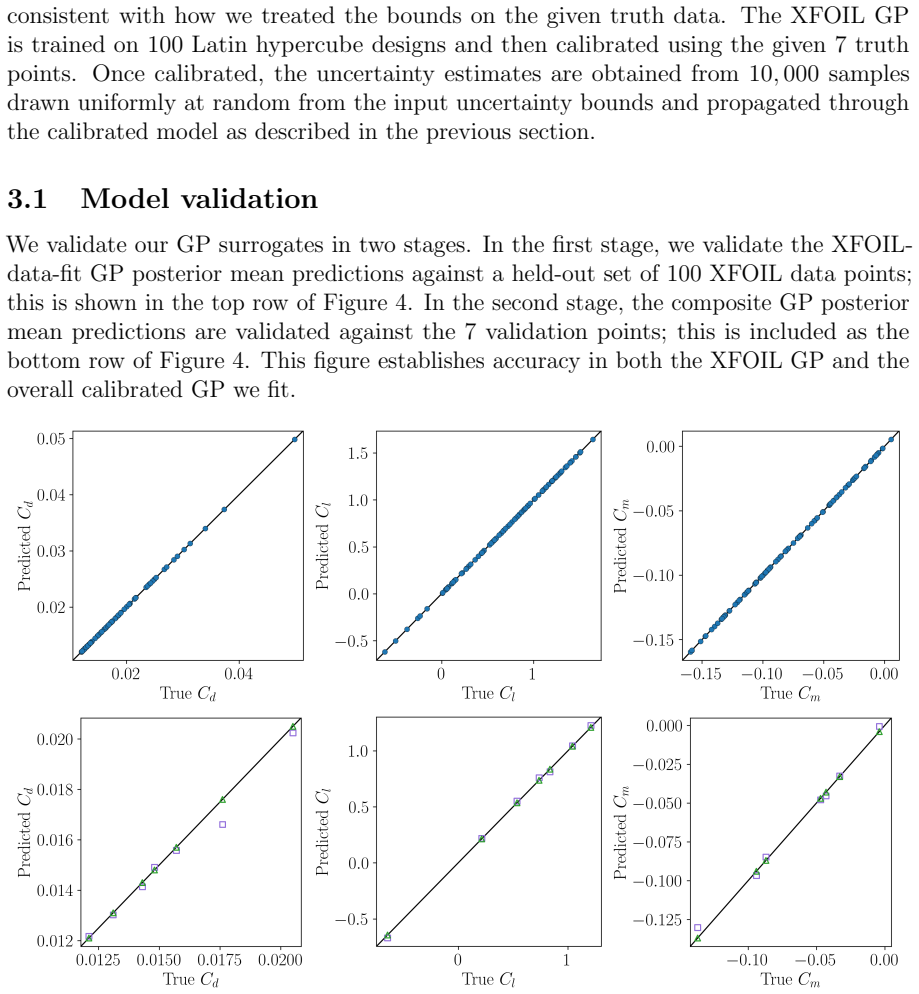
Predicting the aerodynamic performance (e.g. lift, drag, and moment coefficients) of an aircraft is challenging -- computational models are biased and direct simulations are prohibitive. A pragmatic way to overcome this limitation is by calibrating low-fidelity computational predictions with experimental measurements. This, however, requires calibrating against \emph{sparse} measurements contaminated with \emph{uncertainty} in both the control inputs and the measured aerodynamic response. We develop a methodology to address this problem based on Gaussian process surrogates and the classical Kennedy-O'Hagan calibration. A surrogate model learned on abundant-but-cheap low-fidelity data is calibrated with a sparse set of measurement data. Crucialy, we develop a Bayesian latent Gaussian process based approach that marginalizes the calibrated surrogate model over the input uncertainty, while also matching the marginal mean and variance of the measured output uncertainty. Once calibrated, our surrogate model predicts the uncertainty in aerodynamic coefficients with very high accuracy, including at extrapolative input settings. We validate our calibrated surrogate model predictions against measurement data with \emph{true} uncertainty intervals to demonstrate that the model places $94.2-95.8\%$ of its predictive samples inside the released $95\%$ truth intervals, with endpoint cumulative probabilities very close to the nominal 0.025 and 0.975 levels.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a Bayesian latent Gaussian process extension to the Kennedy-O'Hagan calibration framework for handling sparse experimental measurements with uncertainty in both control inputs and aerodynamic responses (lift, drag, moment coefficients). A low-fidelity surrogate is calibrated on abundant cheap data and then adjusted with the sparse uncertain measurements; the latent-GP component is used to marginalize over input uncertainty while matching the marginal mean and variance of the output uncertainty. The central empirical claim is that the resulting surrogate predicts uncertainty with high accuracy, including at extrapolative inputs, as evidenced by placing 94.2–95.8 % of predictive samples inside the released 95 % truth intervals with endpoint cumulative probabilities near the nominal 0.025 and 0.975 levels.
Significance. If the reported coverage and endpoint-CDF results hold under the full methodology, the work supplies a practical, data-efficient route to uncertainty quantification for aerodynamic coefficients when high-fidelity simulation is prohibitive and experimental data are both sparse and noisy in the inputs. The explicit validation against measurement data that carry their own uncertainty intervals supplies a concrete, falsifiable check that is stronger than typical surrogate validation.
major comments (2)
- [Abstract] Abstract: the claim that the latent-GP extension 'marginalizes the calibrated surrogate model over the input uncertainty, while also matching the marginal mean and variance of the measured output uncertainty' is the load-bearing modeling step, yet the abstract supplies no equation or derivation sketch; without seeing the precise construction (e.g., how the latent process is coupled to the Kennedy-O'Hagan discrepancy term), it is impossible to verify that the marginal-moment matching is achieved without introducing additional free parameters or identifiability issues.
- [Abstract] Validation paragraph: the reported coverage (94.2–95.8 %) and endpoint CDF values are presented as direct support for the accuracy claim, but the abstract gives no information on the number of validation points, the distribution of extrapolative inputs, or any sensitivity of these metrics to the choice of latent-GP hyperparameters; if these numbers rest on a single hold-out set without cross-validation or bootstrap, the strength of the empirical support is reduced.
minor comments (2)
- [Abstract] Typo: 'Crucialy' should read 'Crucially'.
- [Abstract] The abstract would be clearer if it named the specific aerodynamic coefficients (lift, drag, moment) and the source or size of the experimental data set used for calibration and validation.
Simulated Author's Rebuttal
We are grateful to the referee for the constructive comments and the recommendation for minor revision. We provide point-by-point responses to the major comments below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the latent-GP extension 'marginalizes the calibrated surrogate model over the input uncertainty, while also matching the marginal mean and variance of the measured output uncertainty' is the load-bearing modeling step, yet the abstract supplies no equation or derivation sketch; without seeing the precise construction (e.g., how the latent process is coupled to the Kennedy-O'Hagan discrepancy term), it is impossible to verify that the marginal-moment matching is achieved without introducing additional free parameters or identifiability issues.
Authors: Abstracts are high-level summaries by design and do not include equations or derivations, which are instead provided in the main body of the manuscript. The precise construction of the latent Gaussian process extension, its coupling to the Kennedy-O'Hagan discrepancy term, and the achievement of marginal-moment matching without additional free parameters or identifiability issues are fully derived and explained in the manuscript. revision: no
-
Referee: [Abstract] Validation paragraph: the reported coverage (94.2–95.8 %) and endpoint CDF values are presented as direct support for the accuracy claim, but the abstract gives no information on the number of validation points, the distribution of extrapolative inputs, or any sensitivity of these metrics to the choice of latent-GP hyperparameters; if these numbers rest on a single hold-out set without cross-validation or bootstrap, the strength of the empirical support is reduced.
Authors: The abstract provides a concise summary of the validation results. Full details on the number of validation points, the distribution of extrapolative inputs, and any sensitivity of the metrics to latent-GP hyperparameters are provided in the manuscript. The reported coverage is obtained from the posterior predictive distribution on the available experimental data using a hold-out approach appropriate to the sparsity of the measurements. revision: no
Circularity Check
No significant circularity detected
full rationale
The derivation relies on the established Kennedy-O'Hagan calibration framework extended by a latent Gaussian process to marginalize input uncertainty while matching output marginal moments. Validation proceeds via direct empirical comparison of predictive coverage (94.2-95.8%) and endpoint CDF values against independent measurement data with true uncertainty intervals; these metrics are not algebraically forced by the model's fitted parameters or by any self-citation chain. No self-definitional equations, renamed predictions, or load-bearing internal citations appear in the abstract or described methodology. The central claim remains externally falsifiable and self-contained against the provided benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Kennedy-O'Hagan calibration framework is appropriate for this aerodynamic surrogate calibration problem with input and output uncertainty
Reference graph
Works this paper leans on
-
[2]
Paul D. Arendt, Daniel W. Apley, and Wei Chen. Quantification of model uncertainty: Calibration, model discrepancy, and identifiability.Journal of Mechanical Design, 134(10):100908, 2012. doi: https://doi.org/10.1115/1.4007390
-
[3]
Data-driven wind turbine wake modeling via probabilistic machine learning.Neural Computing and Applications, 34(8):6171–6186, 2022
S Ashwin Renganathan, Romit Maulik, Stefano Letizia, and Giacomo Valerio Iungo. Data-driven wind turbine wake modeling via probabilistic machine learning.Neural Computing and Applications, 34(8):6171–6186, 2022. doi: https://doi.org/10.1007/ s00521-021-06799-6
2022
-
[4]
M. J. Bayarri, James O. Berger, Rui Paulo, Jerry Sacks, John A. Cafeo, James Cavendish, Chin-Hsu Lin, and Jian Tu. A framework for validation of com- puter models.Technometrics, 49(2):138–154, 2007. doi: https://doi.org/10.1198/ 004017007000000092
2007
-
[5]
A Conceptual Introduction to Hamiltonian Monte Carlo
Michael Betancourt. A conceptual introduction to hamiltonian monte carlo.arXiv preprint arXiv:1701.02434, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[6]
Variational inference: A review for statisticians.Journal of the American statistical Association, 112(518):859–877,
David M Blei, Alp Kucukelbir, and Jon D McAuliffe. Variational inference: A review for statisticians.Journal of the American statistical Association, 112(518):859–877,
-
[7]
doi: https://doi.org/10.1080/01621459.2017.1285773
-
[8]
Contour location for reliability in airfoil simulation experiments using deep gaussian processes.The Annals of Applied Statistics, 19(1):191–211, 2025
Annie S Booth, S Ashwin Renganathan, and Robert B Gramacy. Contour location for reliability in airfoil simulation experiments using deep gaussian processes.The Annals of Applied Statistics, 19(1):191–211, 2025. doi: https://doi.org/10.1214/ 24-AOAS1951
2025
-
[9]
Jenn´ y Brynjarsd´ ottir and Anthony O’Hagan. Learning about physical parameters: The importance of model discrepancy.Inverse Problems, 30(11):114007, 2014. doi: https://doi.org/10.1088/0266-5611/30/11/114007
-
[10]
Kade Carlson and Ashwin Renganathan. Multiobjective aerodynamic design opti- mization of the nasa common research model.Aerospace Science and Technology, page 111120, 2025. doi: https://doi.org/10.1016/j.ast.2025.111120
-
[11]
Cary, John A
Andrew W. Cary, John A. Schaefer, Earl P. N. Duque, Manas S. Khurana, and Erin C. DeCarlo. Overview of challenges in performing uncertainty quantification for fluids engineering problems. InAIAA SciTech Forum, 2022. doi: https://doi.org/10. 2514/6.2022-2357
2022
-
[12]
Overview of fluid dynamics uncertainty quantification challenge problem and results
Andrew W Cary, John A Schaefer, Erin C DeCarlo, Earl P Duque, and Manas Khurana. Overview of fluid dynamics uncertainty quantification challenge problem and results. InAIAA SCITECH 2024 Forum, page 0705, 2024. doi: https://doi.org/ 10.2514/6.2024-0705. 25
-
[13]
Summary of the second aiaa uncertainty quantification challenge problem for aerodynamics
Andrew W Cary, Markus Rumpfkeil, Peter O Hristov, and John A Schaefer. Summary of the second aiaa uncertainty quantification challenge problem for aerodynamics. InAIAA SCITECH 2026 Forum, page 0091, 2026. doi: https://doi.org/10.2514/6. 2026-0091
work page doi:10.2514/6 2026
-
[14]
Learning gaussian process models from uncertain data
Patrick Dallaire, Camille Besse, and Brahim Chaib-draa. Learning gaussian process models from uncertain data. InNeural Information Processing, volume 5863 of Lecture Notes in Computer Science, pages 433–440. Springer, 2009. doi: https: //doi.org/10.1007/978-3-642-10677-4 49
-
[15]
Damianou, Michalis K
Andreas C. Damianou, Michalis K. Titsias, and Neil D. Lawrence. Variational inference for latent variables and uncertain inputs in gaussian processes.Journal of Machine Learning Research, 17:1–62, 2016
2016
-
[16]
Uncertainty quantification via latent gaussian process surrogates for the second aiaa fluid dynamics uq challenge problem
Geoffrey Davis and Ashwin Renganathan. Uncertainty quantification via latent gaussian process surrogates for the second aiaa fluid dynamics uq challenge problem. InAIAA SCITECH 2026 Forum, page 0095, 2026
2026
-
[17]
Xfoil: An analysis and design system for low reynolds number airfoils
Mark Drela. Xfoil: An analysis and design system for low reynolds number airfoils. InLow Reynolds number aerodynamics, pages 1–12. Springer, 1989
1989
-
[18]
Gaussian process priors with uncertain inputs application to multiple-step ahead time series forecasting.Advances in neural information processing systems, 15, 2002
Agathe Girard, Carl Rasmussen, Joaquin Q Candela, and Roderick Murray-Smith. Gaussian process priors with uncertain inputs application to multiple-step ahead time series forecasting.Advances in neural information processing systems, 15, 2002
2002
-
[19]
Gramacy.Surrogates: Gaussian Process Modeling, Design, and Optimiza- tion for the Applied Sciences
Robert B. Gramacy.Surrogates: Gaussian Process Modeling, Design, and Optimiza- tion for the Applied Sciences. Chapman and Hall/CRC, Boca Raton, FL, 2020. doi: https://doi.org/10.1201/9780367815493
-
[20]
Cavendish, John A
Dave Higdon, Marc Kennedy, James C. Cavendish, John A. Cafeo, and Robert D. Ryne. Combining field data and computer simulations for calibration and prediction. SIAM Journal on Scientific Computing, 26(2):448–466, 2004. doi: https://doi.org/10. 1137/S1064827503426693
2004
-
[21]
Dave Higdon, James Gattiker, Brian Williams, and Maria Rightley. Computer model calibration using high-dimensional output.Journal of the American Statistical Asso- ciation, 103(482):570–583, 2008. doi: https://doi.org/10.1198/016214507000000888
-
[22]
Marc C. Kennedy and Anthony O’Hagan. Bayesian calibration of computer models. Journal of the Royal Statistical Society: Series B (Statistical Methodology), 63(3): 425–464, 2001. doi: https://doi.org/10.1111/1467-9868.00294
-
[23]
Lawrence
Neil D. Lawrence. Probabilistic non-linear principal component analysis with gaussian process latent variable models.Journal of Machine Learning Research, 6:1783–1816, 2005
2005
-
[24]
Bayarri, and James O
Fei Liu, Maria J. Bayarri, and James O. Berger. Modularization in bayesian analysis, with emphasis on analysis of computer models.Bayesian Analysis, 4(1):119–150,
-
[25]
doi: https://doi.org/10.1214/09-BA404
-
[26]
On latin hypercube sampling.The annals of statistics, 24(5):2058– 2080, 1996
Wei-Liem Loh. On latin hypercube sampling.The annals of statistics, 24(5):2058– 2080, 1996. doi: https://doi.org/10.1214/aos/1069362310. 26
-
[27]
Gaussian process training with input noise
Andrew McHutchon and Carl Edward Rasmussen. Gaussian process training with input noise. InAdvances in Neural Information Processing Systems, volume 24, pages 1341–1349, 2011
2011
-
[28]
Oberkampf and Christopher J
William L. Oberkampf and Christopher J. Roy. Verification and validation in scientific computing.Cambridge University Press, 2010
2010
-
[29]
Taking into account input uncertainties in the bayesian calibration of time-consuming simulators.Journal de la Soci´ et´ e Fran¸ caise de Statistique, 160(2):24–46, 2019
Guillaume Perrin and C´ edric Durantin. Taking into account input uncertainties in the bayesian calibration of time-consuming simulators.Journal de la Soci´ et´ e Fran¸ caise de Statistique, 160(2):24–46, 2019
2019
-
[30]
Wood, Natalya Pya, and Benjamin Säfken
Matthew Plumlee. Bayesian calibration of inexact computer models.Journal of the American Statistical Association, 112(519):1274–1285, 2017. doi: https://doi.org/10. 1080/01621459.2016.1211016
-
[31]
Propagation of uncertainty in bayesian kernel models—application to multiple-step ahead forecasting
Joaquin Qui˜ nonero-Candela, Agathe Girard, Jan Larsen, and Carl Edward Rasmussen. Propagation of uncertainty in bayesian kernel models—application to multiple-step ahead forecasting. InProceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, volume 2, pages 701–704. IEEE, 2003. doi: https: //doi.org/10.1109/ICASSP.200...
-
[32]
Rasmussen and Christopher K
Carl E. Rasmussen and Christopher K. I. Williams.Gaussian Processes for Machine Learning. MIT Press, 2006
2006
-
[33]
Efficient reliability analysis with multifidelity gaussian pro- cesses and normalizing flows
Ashwin Renganathan. Efficient reliability analysis with multifidelity gaussian pro- cesses and normalizing flows. InAIAA SCITECH 2024 Forum, page 0576, 2024. doi: https://doi.org/10.2514/6.2024-0576
-
[34]
qpots: Efficient batch multiobjective bayesian optimization via pareto optimal thompson sampling
Ashwin Renganathan and Kade Carlson. qpots: Efficient batch multiobjective bayesian optimization via pareto optimal thompson sampling. InInternational Conference on Artificial Intelligence and Statistics, pages 4051–4059. PMLR, 2025
2025
-
[35]
Multifidelity gaussian processes for failure boundary and probability estimation
Ashwin Renganathan, Vishwas Rao, and Ionel Navon. Multifidelity gaussian processes for failure boundary and probability estimation. InAIAA Scitech 2022 Forum, page 0390, 2022. doi: https://doi.org/10.2514/6.2022-0390
-
[36]
S Ashwin Renganathan, Jeffrey Larson, and Stefan M Wild. Lookahead acquisition functions for finite-horizon time-dependent bayesian optimization and application to quantum optimal control.arXiv preprint arXiv:2105.09824, 2021
-
[37]
S Ashwin Renganathan, Romit Maulik, and Jai Ahuja. Enhanced data efficiency using deep neural networks and gaussian processes for aerodynamic design optimization. Aerospace Science and Technology, 111:106522, 2021. doi: https://doi.org/10.1016/j. ast.2021.106522
work page doi:10.1016/j 2021
-
[38]
S Ashwin Renganathan, Vishwas Rao, and Ionel M Navon. Camera: A method for cost- aware, adaptive, multifidelity, efficient reliability analysis.Journal of Computational Physics, 472:111698, 2023. doi: https://doi.org/10.1016/j.jcp.2022.111698
-
[39]
Design and analysis of computer experiments.Statistical science, 4(4):409–423, 1989
Jerome Sacks, William J Welch, Toby J Mitchell, and Henry P Wynn. Design and analysis of computer experiments.Statistical science, 4(4):409–423, 1989. doi: https://doi.org/10.1214/ss/1177012413. 27
-
[40]
Thomas J Santner, Brian J Williams, William I Notz, and Brain J Williams.The design and analysis of computer experiments, volume 1. Springer, 2003. doi: https: //doi.org/10.1007/978-1-4939-8847-1
-
[41]
Titsias and Neil D
Michalis K. Titsias and Neil D. Lawrence. Bayesian gaussian process latent variable model. InProceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, volume 9 ofProceedings of Machine Learning Research, pages 844–851, 2010
2010
-
[42]
Rui Tuo and C. F. Jeff Wu. Efficient calibration for imperfect computer mod- els.The Annals of Statistics, 43(6):2331–2352, 2015. doi: https://doi.org/10.1214/ 15-AOS1314
2015
-
[43]
Rui Tuo and C. F. Jeff Wu. A theoretical framework for calibration in computer models: Parametrization, estimation and convergence properties.SIAM/ASA Journal on Uncertainty Quantification, 4(1):767–795, 2016. doi: https://doi.org/10.1137/ 151005841
2016
-
[44]
Jian-Xun Wang, Christopher J. Roy, and Heng Xiao. Propagation of input uncertainty in presence of model-form uncertainty: A multifidelity approach for computational fluid dynamics applications.ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, Part B: Mechanical Engineering, 4(1):011002, 2018. doi: https: //doi.org/10.1115/1.4037452
-
[45]
Kail Yuan and Ashwin Renganathan. Remal: Residual equilibrium manifold ac- tive learning for surrogate-based multidisciplinary design analysis.arXiv preprint arXiv:2606.13245, 2026. 28
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.