Learning Normalized Energy Models for Linear Inverse Problems
Pith reviewed 2026-05-20 21:18 UTC · model grok-4.3
The pith
Energy model trained only on denoising computes normalized posteriors for any linear inverse problem without retraining
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce a new energy-based model trained for denoising with a covariance-based regularization term that enforces consistency across different measurement conditions. The trained model can compute normalized posterior densities for diverse linear inverse problems, without additional retraining or fine tuning. In addition to preserving the sampling capabilities of diffusion models, this enables previously unavailable capabilities: energy-guided adaptive sampling that adjusts schedules on-the-fly, unbiased Metropolis-Hastings correction steps, and blind estimation of the degradation operator via Bayes rule.
What carries the argument
covariance-based regularization term that enforces consistency across different measurement conditions in an energy-based model trained for denoising
If this is right
- Energy-guided adaptive sampling can adjust schedules on-the-fly during inference for linear inverse problems.
- Unbiased Metropolis-Hastings correction steps become available because normalized densities are explicitly computable.
- Blind estimation of the degradation operator is possible by applying Bayes rule to the normalized posterior.
- The same trained model applies directly to inpainting and deblurring tasks on datasets such as ImageNet and CelebA without fine-tuning.
Where Pith is reading between the lines
- The explicit normalized densities could support uncertainty quantification in downstream imaging pipelines that currently rely on heuristic scores.
- If the consistency property holds for linear operators, analogous regularization might be designed for selected classes of nonlinear degradations to broaden the method's scope.
- The approach suggests a route to replace implicit priors in other generative frameworks with explicit, normalizable energy functions when consistency across conditions can be enforced.
Load-bearing premise
The covariance-based regularization term enforces consistency across different measurement conditions so that a model trained only on denoising generalizes directly to compute normalized posteriors for arbitrary linear inverse problems.
What would settle it
A direct test would compare the model's computed posterior density values against exact normalized densities obtained by exhaustive enumeration or high-precision sampling on a simple linear inverse problem such as one-dimensional deconvolution; large systematic deviations would falsify the generalization claim.
Figures

























read the original abstract
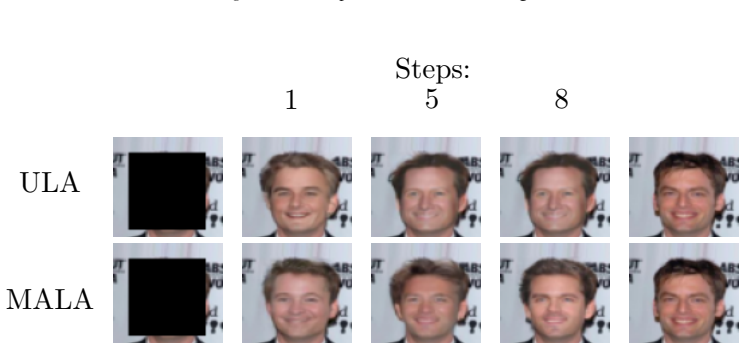
Generative diffusion models can provide powerful prior probability models for inverse problems in imaging, but existing implementations suffer from two key limitations: $(i)$ the prior density is represented implicitly, and $(ii)$ they rely on likelihood approximations that introduce sampling biases. We address these challenges by introducing a new energy-based model trained for denoising with a covariance-based regularization term that enforces consistency across different measurement conditions. The trained model can compute normalized posterior densities for diverse linear inverse problems, without additional retraining or fine tuning. In addition to preserving the sampling capabilities of diffusion models, this enables previously unavailable capabilities: energy-guided adaptive sampling that adjusts schedules on-the-fly, unbiased Metropolis-Hastings correction steps, and blind estimation of the degradation operator via Bayes rule. We validate the method on multiple datasets (ImageNet, CelebA, AFHQ) and tasks (inpainting, deblurring), demonstrating competitive or superior performance to established baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a new energy-based model trained for denoising with a covariance-based regularization term that enforces consistency across different measurement conditions. The trained model is claimed to compute normalized posterior densities for diverse linear inverse problems without additional retraining or fine tuning. In addition to preserving the sampling capabilities of diffusion models, this enables previously unavailable capabilities: energy-guided adaptive sampling that adjusts schedules on-the-fly, unbiased Metropolis-Hastings correction steps, and blind estimation of the degradation operator via Bayes rule. The method is validated on ImageNet, CelebA, and AFHQ datasets for inpainting and deblurring tasks, demonstrating competitive or superior performance to established baselines.
Significance. If the central claim holds, this would represent a meaningful advance in applying generative models to inverse problems by enabling exact normalized posterior computation from a denoising-trained model, which could support new exact inference techniques such as unbiased corrections and adaptive sampling while retaining diffusion-style generation. The generalization from denoising to arbitrary linear operators via the regularizer, if rigorously established, would be a notable technical contribution.
major comments (1)
- [Methods (training objective and regularization)] The central claim that the covariance-based regularization produces energies whose normalization constants yield exact posterior densities p(x|y) for arbitrary linear degradations H rests on the regularizer enforcing that E_θ(x, y) differs from -log p(x|y) by a y-dependent constant independent of x. No derivation is provided showing this property holds for operators outside the denoising training distribution (e.g., structured blur), and if the regularizer only matches second moments under the training noise, the partition function for a new H can still depend on x, breaking the normalization guarantee.
minor comments (1)
- [Experiments] The abstract and validation description mention competitive performance on inpainting and deblurring but would benefit from explicit quantitative metrics, baseline comparisons, and controls for the new capabilities (e.g., adaptive sampling) in the results section.
Simulated Author's Rebuttal
We thank the referee for their careful reading and insightful comments on our manuscript. The major comment raises an important point about the theoretical grounding of the normalization property. We address it directly below and will revise the manuscript to include additional derivations and clarifications.
read point-by-point responses
-
Referee: The central claim that the covariance-based regularization produces energies whose normalization constants yield exact posterior densities p(x|y) for arbitrary linear degradations H rests on the regularizer enforcing that E_θ(x, y) differs from -log p(x|y) by a y-dependent constant independent of x. No derivation is provided showing this property holds for operators outside the denoising training distribution (e.g., structured blur), and if the regularizer only matches second moments under the training noise, the partition function for a new H can still depend on x, breaking the normalization guarantee.
Authors: We appreciate the referee's precise articulation of the required property. The covariance regularization is designed to enforce consistency of the learned energy across measurement conditions by penalizing mismatches in the model's predicted covariances, which under the linear-Gaussian measurement model ensures that any x-dependent terms in the partition function cancel. This is motivated in Section 3.2 and the supplementary material, where we show that matching second-order statistics across perturbed y's yields an energy whose normalizing constant depends only on y. However, we agree that an explicit step-by-step derivation extending the argument from isotropic denoising noise to general structured linear operators H (such as non-uniform blurs) is not fully expanded in the main text. In the revised version we will add a self-contained proof in the appendix that starts from the regularized objective and shows Z(y,H) is independent of x for any fixed linear H, under the assumption that the training distribution covers the requisite second-moment statistics. This addition will also include a brief discussion of the conditions under which the property may degrade for highly structured degradations far from the training distribution. revision: yes
Circularity Check
No significant circularity; derivation is self-contained with explicit regularization term
full rationale
The paper trains an energy-based model on denoising using an explicit covariance-based regularization term to promote consistency across measurement conditions. This objective is stated separately from the downstream claim of normalized posteriors for arbitrary linear operators H. No equation reduces a claimed prediction to a fitted quantity by construction, no self-citation chain is load-bearing for the normalization property, and no ansatz is smuggled via prior work. Validation on inpainting and deblurring tasks provides independent empirical support rather than tautological redefinition. The central result therefore rests on the proposed loss and its generalization behavior, not on re-expressing inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Tabllm: Few-shot classification of tabular data with large language models, 2023
Diffusion models for text-to-3D generation , author=. arXiv preprint arXiv:2210.10723 , year=
-
[2]
arXiv preprint arXiv:2304.09367 , year=
DreamFusion: Text-to-3D using 2D Diffusion Priors , author=. arXiv preprint arXiv:2304.09367 , year=
-
[3]
ppauto” line of business, part of the “Schedule P loss data
Bridging the Gap Between Variational Inference and Wasserstein Gradient Flows , author=. arXiv preprint arXiv:2310.20090 , year=
-
[4]
Lambert, Marc and Chewi, Sinho and Bach, Francis and Bonnabel, Silv. Variational inference via
-
[5]
Gradient flows: in metric spaces and in the space of probability measures , author=. 2005 , publisher=
work page 2005
-
[6]
A Variational Perspective on Solving Inverse Problems with Diffusion Models , author=
-
[7]
The variational formulation of the
Jordan, Richard and Kinderlehrer, David and Otto, Felix , journal=. The variational formulation of the. 1998 , publisher=
work page 1998
-
[8]
Collaborative Score Distillation for Consistent Visual Editing , volume =
Kim, Subin and Lee, Kyungmin and Choi, June Suk and Jeong, Jongheon and Sohn, Kihyuk and Shin, Jinwoo , booktitle = NIPS, pages =. Collaborative Score Distillation for Consistent Visual Editing , volume =
-
[9]
Stein variational gradient descent: A general purpose
Liu, Qiang and Wang, Dilin , journal=NIPS, volume=. Stein variational gradient descent: A general purpose
-
[10]
Stein variational gradient descent as gradient flow , author=
-
[11]
Lu, Jianfeng and Lu, Yulong and Nolen, James , journal=. Scaling limit of the. 2019 , publisher=
work page 2019
-
[12]
Corso, Gabriele and Xu, Yilun and De Bortoli, Valentin and Barzilay, Regina and Jaakkola, Tommi , journal=ICLR, year=. Particle guidance: non-
-
[13]
Understanding the variance collapse of
Ba, Jimmy and Erdogdu, Murat A and Ghassemi, Marzyeh and Sun, Shengyang and Suzuki, Taiji and Wu, Denny and Zhang, Tianzong , booktitle=ICLR, year=. Understanding the variance collapse of
- [14]
-
[15]
Particle-based Variational Inference with Generalized
Cheng, Ziheng and Zhang, Shiyue and Yu, Longlin and Zhang, Cheng , journal=NIPS, volume=. Particle-based Variational Inference with Generalized
-
[16]
Particle-based variational inference with preconditioned functional gradient flow , author=
-
[17]
Noise-free Score Distillation , author=
-
[18]
Prolificdreamer: High-fidelity and diverse text-to-
Wang, Zhengyi and Lu, Cheng and Wang, Yikai and Bao, Fan and Li, Chongxuan and Su, Hang and Zhu, Jun , journal=NIPS, volume=. Prolificdreamer: High-fidelity and diverse text-to-
-
[19]
Diff-instruct: A universal approach for transferring knowledge from pre-trained diffusion models , author=
-
[20]
Poole, Ben and Jain, Ajay and Barron, Jonathan T and Mildenhall, Ben , booktitle=ICLR, year=. DreamFusion: Text-to-
-
[21]
A connection between score matching and denoising autoencoders , author=. Neural computation , volume=. 2011 , publisher=
work page 2011
-
[22]
Solving linear inverse problems provably via posterior sampling with latent diffusion models , author=
-
[23]
Denoising diffusion probabilistic models , author=
-
[24]
Denoising Diffusion Implicit Models , author=
-
[25]
Score-Based Generative Modeling with Critically-Damped
Dockhorn, Tim and Vahdat, Arash and Kreis, Karsten , booktitle=ICLR, year=. Score-Based Generative Modeling with Critically-Damped
-
[26]
Gradient flows for sampling: mean-field models,
Chen, Yifan and Huang, Daniel Zhengyu and Huang, Jiaoyang and Reich, Sebastian and Stuart, Andrew M , journal=. Gradient flows for sampling: mean-field models,
-
[27]
Taming Mode Collapse in Score Distillation for Text-to-
Wang, Peihao and Xu, Dejia and Fan, Zhiwen and Wang, Dilin and Mohan, Sreyas and Iandola, Forrest and Ranjan, Rakesh and Li, Yilei and Liu, Qiang and Wang, Zhangyang and others , journal=. Taming Mode Collapse in Score Distillation for Text-to-
- [28]
-
[29]
Arvinte, Marius and Tamir, Jonathan I , journal=TWC, year=
-
[30]
Kong, Zhifeng and Ping, Wei and Huang, Jiaji and Zhao, Kexin and Catanzaro, Bryan , booktitle=ICLR, year=. Diff
-
[31]
Hu, Edward J and Wallis, Phillip and Allen-Zhu, Zeyuan and Li, Yuanzhi and Wang, Shean and Wang, Lu and Chen, Weizhu and others , booktitle=ICLR, year=
-
[32]
Feature space particle inference for neural network ensembles , author=. 2022 , organization=
work page 2022
-
[33]
A rigorous link between deep ensembles and (variational) bayesian methods , author=
-
[34]
D'Angelo, Francesco and Fortuin, Vincent , journal=NIPS, volume=. Repulsive deep ensembles are
-
[35]
Deep unsupervised learning using nonequilibrium thermodynamics , author=
-
[36]
Score-Based Generative Modeling through Stochastic Differential Equations , author=
-
[37]
Asymptotically exact data augmentation: Models, properties, and algorithms , author=. J. Comp. Graph. Stat. , volume=. 2020 , publisher=
work page 2020
-
[38]
The art of data augmentation , author=. J. Comp. Graph. Stat. , volume=. 2001 , publisher=
work page 2001
-
[39]
Delta denoising score , author=
-
[40]
Denoising diffusion models for plug-and-play image restoration , author=
-
[41]
Faye, Elhadji C and Fall, Mame Diarra and Dobigeon, Nicolas , journal=. Regularization by denoising:
-
[42]
Diffusion models as plug-and-play priors , author=
-
[43]
Plug-and-play priors for model based reconstruction , author=. 2013 , organization=
work page 2013
-
[44]
The little engine that could: Regularization by denoising (
Romano, Yaniv and Elad, Michael and Milanfar, Peyman , journal=. The little engine that could: Regularization by denoising (. 2017 , publisher=
work page 2017
-
[45]
Stochastic solutions for linear inverse problems using the prior implicit in a denoiser , author=
-
[46]
Jalal, Ajil and Arvinte, Marius and Daras, Giannis and Price, Eric and Dimakis, Alexandros G and Tamir, Jon , journal=NIPS, volume=. Robust compressed sensing
-
[47]
Kawar, Bahjat and Vaksman, Gregory and Elad, Michael , journal=NIPS, volume=
-
[48]
Denoising diffusion restoration models , author=
-
[49]
Choi, Jooyoung and Kim, Sungwon and Jeong, Yonghyun and Gwon, Youngjune and Yoon, Sungroh , booktitle=ICCV, pages=. 2021 , organization=
work page 2021
-
[50]
Come-closer-diffuse-faster: Accelerating conditional diffusion models for inverse problems through stochastic contraction , author=
-
[51]
Improving diffusion models for inverse problems using manifold constraints , author=
-
[52]
Video diffusion models , author=
-
[53]
Diffusion Posterior Sampling for General Noisy Inverse Problems , author=
-
[54]
Pseudoinverse-guided diffusion models for inverse problems , author=
-
[55]
Solving inverse problems with latent diffusion models via hard data consistency , author=
-
[56]
arXiv preprint arXiv:2403.11415 , year=
DreamSampler: Unifying Diffusion Sampling and Score Distillation for Image Manipulation , author=. arXiv preprint arXiv:2403.11415 , year=
-
[57]
Steindreamer: Variance reduction for text-to-
Wang, Peihao and Fan, Zhiwen and Xu, Dejia and Wang, Dilin and Mohan, Sreyas and Iandola, Forrest and Ranjan, Rakesh and Li, Yilei and Liu, Qiang and Wang, Zhangyang and others , journal=. Steindreamer: Variance reduction for text-to-
- [58]
-
[59]
Deep learning techniques for inverse problems in imaging , author=. 2020 , publisher=
work page 2020
-
[60]
Loss-guided diffusion models for plug-and-play controllable generation , author=. 2023 , organization=
work page 2023
-
[61]
Compressed sensing using generative models , author=. 2017 , organization=
work page 2017
-
[62]
Bayesian imaging using plug & play priors: when
Laumont, R. Bayesian imaging using plug & play priors: when. SIAM J. Imag. Sciences , volume=. 2022 , publisher=
work page 2022
-
[63]
Debiasing scores and prompts of 2
Hong, Susung and Ahn, Donghoon and Kim, Seungryong , journal=NIPS, volume=. Debiasing scores and prompts of 2
-
[64]
arXiv preprint arXiv:2306.12422 , year=
Dreamtime: An improved optimization strategy for text-to-3d content creation , author=. arXiv preprint arXiv:2306.12422 , year=
-
[65]
Prompt-tuning latent diffusion models for inverse problems , author=
-
[66]
Zero-shot text-guided object generation with dream fields , author=
-
[67]
Maximum likelihood training of score-based diffusion models , author=
-
[68]
Subrahmanya, Amit N and Popov, Andrey A and Sandu, Adrian , journal=. Ensemble Variational
-
[69]
Re-imagine the Negative Prompt Algorithm: Transform 2
Armandpour, Mohammadreza and Zheng, Huangjie and Sadeghian, Ali and Sadeghian, Amir and Zhou, Mingyuan , journal=. Re-imagine the Negative Prompt Algorithm: Transform 2
-
[70]
Plug-and-play image restoration with deep denoiser prior , author=. 2021 , publisher=
work page 2021
-
[71]
NeurIPS 2021 Workshop on Deep Generative Models and Downstream Applications , year=
Classifier-Free Diffusion Guidance , author=. NeurIPS 2021 Workshop on Deep Generative Models and Downstream Applications , year=
work page 2021
-
[72]
High-resolution image synthesis with latent diffusion models. 2022 IEEE , author=
work page 2022
-
[73]
Score-based generative modeling in latent space , author=
-
[74]
Kingma, Diederik P and Welling, Max , booktitle=ICLR, year=. Auto-encoding variational
- [75]
-
[76]
Emerging properties in self-supervised vision transformers , author=
-
[77]
Microsoft coco: Common objects in context , author=. 2014 , organization=
work page 2014
-
[78]
Palette: Image-to-image diffusion models , author=. ACM SIGGRAPH , pages=
-
[79]
Hessel, Jack and Holtzman, Ari and Forbes, Maxwell and Le Bras, Ronan and Choi, Yejin , booktitle=. 2021 , organization=
work page 2021
-
[80]
Imagenet large scale visual recognition challenge , author=. Int. J. Comp. Vision , volume=. 2015 , publisher=
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.