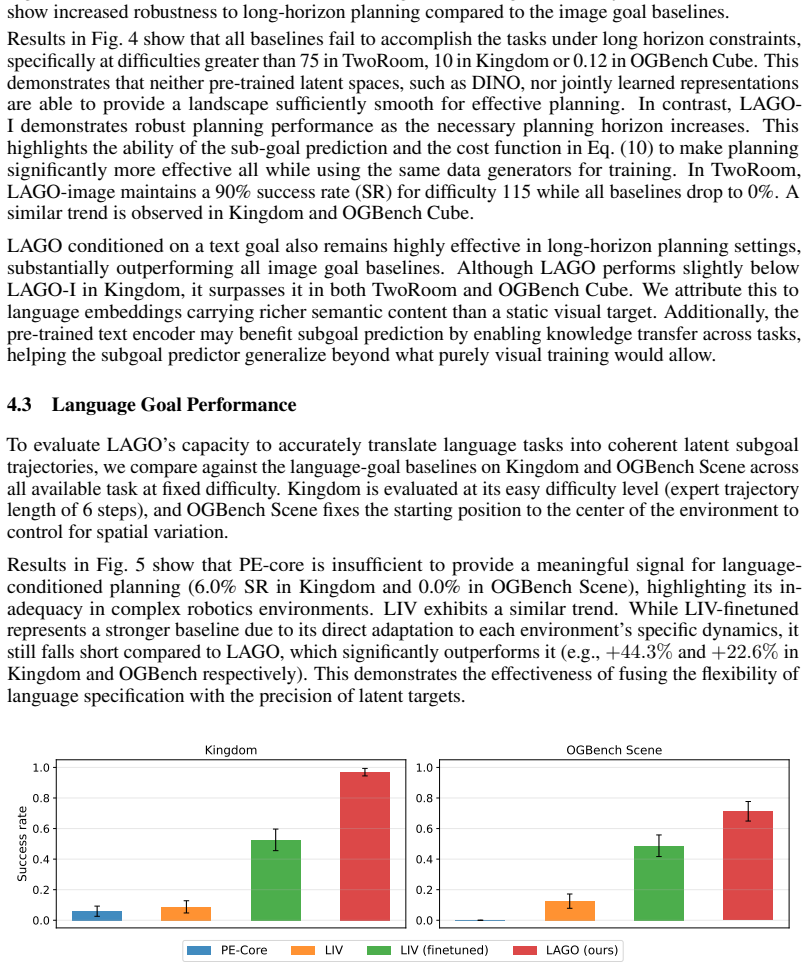
Latent Goal Prediction from Language for Model-Based Planning
Pith reviewed 2026-06-29 16:37 UTC · model grok-4.3
The pith
LAGO predicts sequences of latent subgoals from language to guide model-based planning over long horizons without sharp degradation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
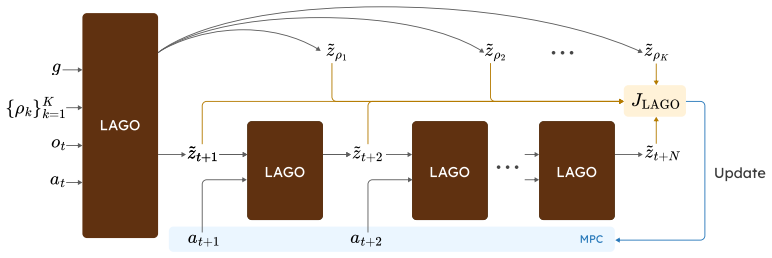
LAGO decomposes language instructions into explicitly predicted sequences of latent subgoals that are optimized jointly with action-conditioned rollouts inside one shared latent space, enabling online subgoal updates and soft-minimum trajectory costs that sustain performance over long planning horizons.
What carries the argument
Latent goal prediction module that outputs sequences of intermediate states from language and shares the latent space with the world model's action rollouts.
If this is right
- Planning can proceed from flexible text instructions without large generative models or external visual targets.
- Subgoal sequences remain locally optimizable because they are generated inside the world model's latent space.
- Online subgoal updates allow the agent to correct course during execution rather than committing to one distant objective.
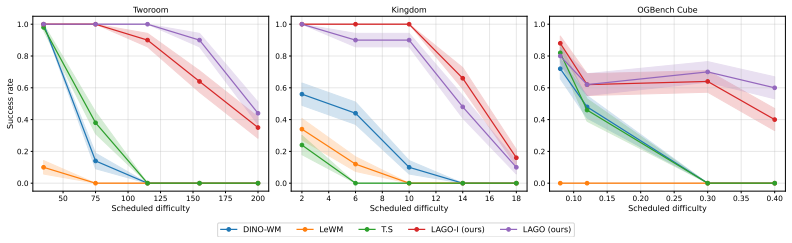
- Performance holds across multiple environments and planning horizons where compounding errors previously dominated.
Where Pith is reading between the lines
- The same latent-space subgoal mechanism could be tested with other input modalities such as demonstrations or sketches if analogous encoders are trained.
- If the mapping proves stable, robotic systems might replace hand-specified visual goals with natural-language task descriptions in model-based controllers.
- Longer-horizon experiments outside the current suite would show whether online subgoal re-prediction continues to counteract error accumulation.
Load-bearing premise
Language instructions can be mapped reliably to accurate, locally tractable sequences of latent subgoals that stay inside the same space used for action-conditioned rollouts.
What would settle it
A controlled test in the paper's environments where LAGO's success rate drops at the same rate as prior language or visual baselines as horizon length increases would falsify the claim of avoiding sharp degradation.
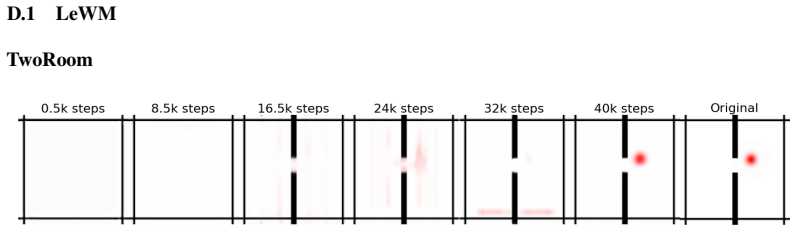
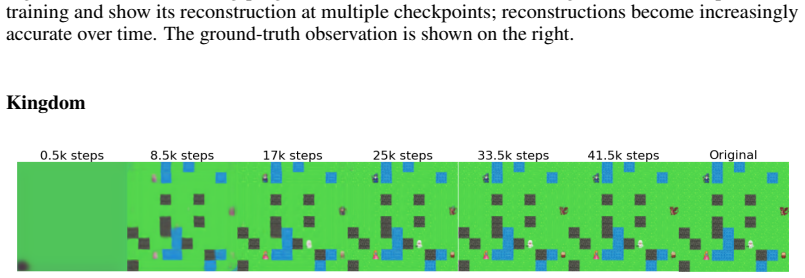
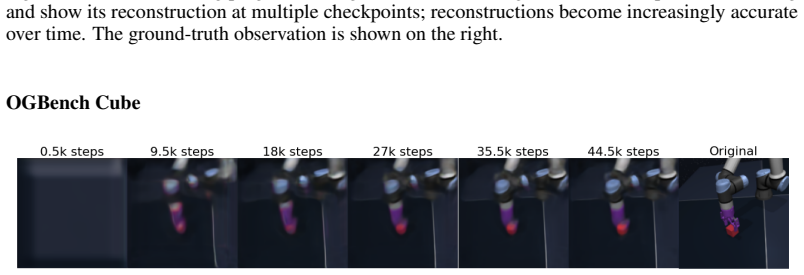
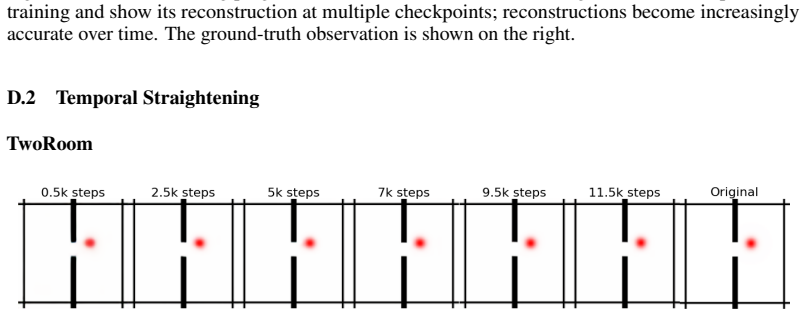
Figures
read the original abstract
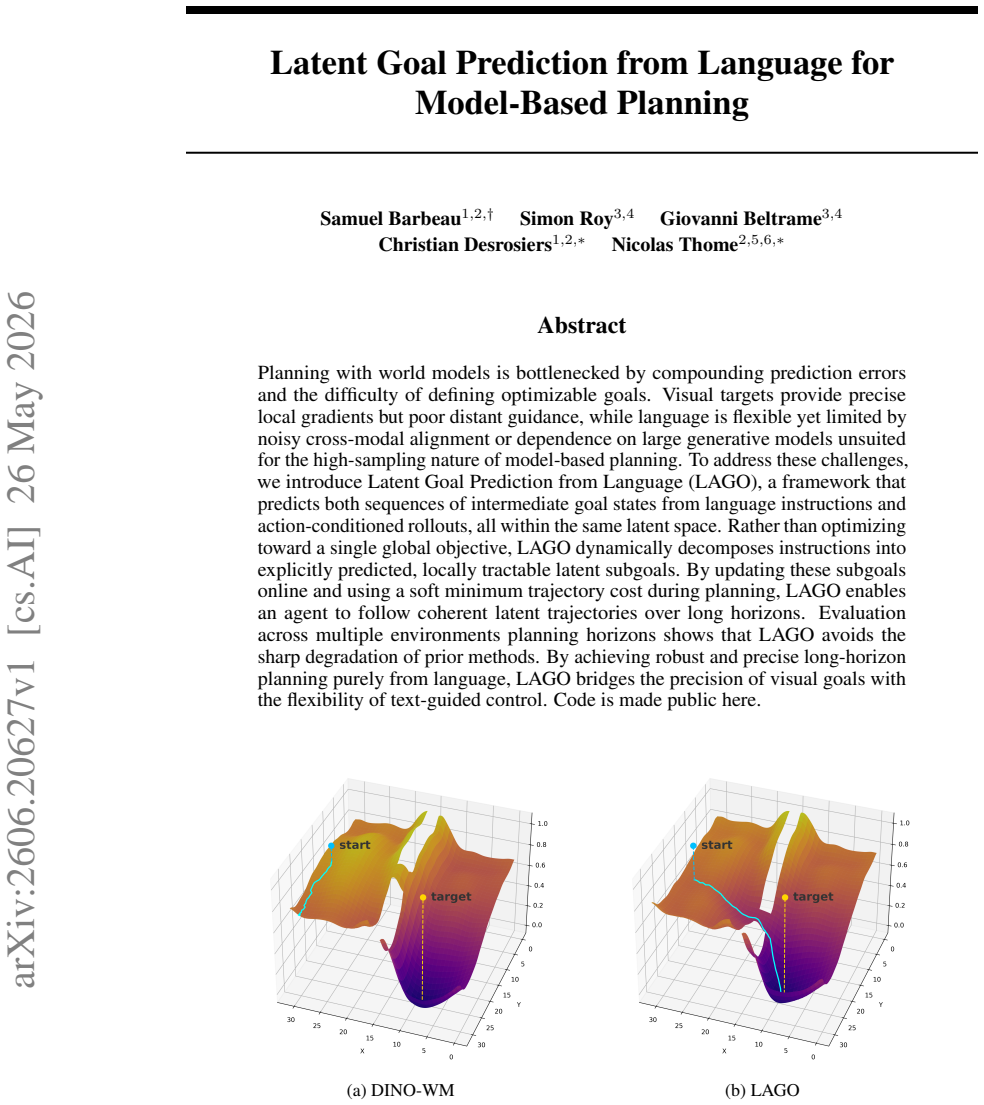
Planning with world models is bottlenecked by compounding prediction errors and the difficulty of defining optimizable goals. Visual targets provide precise local gradients but poor distant guidance, while language is flexible yet limited by noisy cross-modal alignment or dependence on large generative models unsuited for the high-sampling nature of model-based planning. To address these challenges, we introduce Latent Goal Prediction from Language (LAGO), a framework that predicts both sequences of intermediate goal states from language instructions and action-conditioned rollouts, all within the same latent space. Rather than optimizing toward a single global objective, LAGO dynamically decomposes instructions into explicitly predicted, locally tractable latent subgoals. By updating these subgoals online and using a soft minimum trajectory cost during planning, LAGO enables an agent to follow coherent latent trajectories over long horizons. Evaluation across multiple environments planning horizons shows that LAGO avoids the sharp degradation of prior methods. By achieving robust and precise long-horizon planning purely from language, LAGO bridges the precision of visual goals with the flexibility of text-guided control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
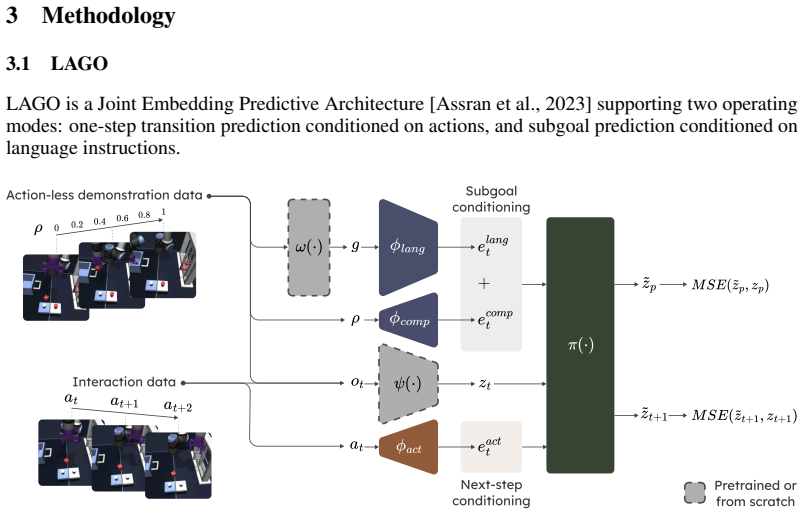
Summary. The paper introduces LAGO, a framework that predicts sequences of intermediate latent goal states from language instructions together with action-conditioned rollouts inside a shared latent space. Instructions are dynamically decomposed into locally tractable subgoals that are updated online; planning then minimizes a soft-minimum trajectory cost over these subgoals rather than a single global objective. The central empirical claim is that this approach avoids the sharp degradation in performance that prior language-conditioned or visual-goal methods exhibit over long planning horizons across multiple environments.
Significance. If the method succeeds in producing dynamically consistent latent subgoals that remain on the support of the world-model dynamics, it would offer a practical route to long-horizon model-based planning that inherits both the precision of latent visual goals and the flexibility of language conditioning, without requiring large generative models at planning time. The reported robustness across horizons would constitute a meaningful advance for language-guided world-model agents.
major comments (1)
- [Abstract] Abstract: the claim that predicted subgoals remain on the manifold of states reachable by the world-model dynamics (and therefore that the soft-minimum cost prevents compounding error) is load-bearing for the long-horizon robustness result, yet the manuscript supplies no description of the training objective, regularization, or consistency loss used to enforce dynamical consistency of the language-conditioned predictor.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for identifying a point where the manuscript's presentation of dynamical consistency could be strengthened. We address the comment below and will revise the manuscript to make the relevant training details explicit.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that predicted subgoals remain on the manifold of states reachable by the world-model dynamics (and therefore that the soft-minimum cost prevents compounding error) is load-bearing for the long-horizon robustness result, yet the manuscript supplies no description of the training objective, regularization, or consistency loss used to enforce dynamical consistency of the language-conditioned predictor.
Authors: We agree that the claim is load-bearing and that the abstract does not itself contain the necessary methodological detail. In the full manuscript, the language-conditioned subgoal predictor is trained with a composite objective consisting of (i) a supervised reconstruction loss aligning predicted latent goals to states observed in expert trajectories and (ii) an explicit dynamics-consistency regularizer that minimizes the L2 distance between each predicted subgoal and the state obtained by unrolling the frozen world-model dynamics for the corresponding number of steps from the preceding subgoal. This term is described in Section 3.2 together with the hyper-parameter controlling its weight. Nevertheless, because the abstract makes the consistency claim without a forward reference, we will revise both the abstract and the methods section to state the consistency loss explicitly and to report its effect on the support of predicted subgoals. revision: yes
Circularity Check
No circularity; derivation chain not present in text
full rationale
The provided abstract and description introduce LAGO as a framework that jointly predicts latent subgoals and rollouts in shared space with online updating and soft-min cost, evaluated empirically across environments. No equations, parameter-fitting steps, self-citations, or derivation chains are shown that would reduce any claimed prediction to an input by construction. The method is presented as a novel combination rather than a mathematical reduction, making the central claim independent of self-referential inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
ICLR , year=
Dream to Control: Learning Behaviors by Latent Imagination , author=. ICLR , year=
-
[2]
NeurIPS , year=
Visual Reinforcement Learning with Imagined Goals , author=. NeurIPS , year=
-
[3]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Subgoal Diffuser: Coarse-to-fine subgoal generation to guide model predictive control for robot manipulation , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[4]
Proceedings of the 34th ACM International Conference on Information and Knowledge Management , pages=
Temporal Distance-aware Subgoal Generation for Offline Hierarchical Reinforcement Learning , author=. Proceedings of the 34th ACM International Conference on Information and Knowledge Management , pages=
-
[5]
2024 , eprint=
Vision Language Models are In-Context Value Learners , author=. 2024 , eprint=
2024
-
[6]
ICML , year=
Learning Transferable Visual Models From Natural Language Supervision , author=. ICML , year=
-
[7]
Hierarchical Entity-centric Reinforcement Learning with Factored Subgoal Diffusion , author=. arXiv preprint arXiv:2602.02722 , year=
-
[8]
2025 , eprint=
DINO-WM: World Models on Pre-trained Visual Features enable Zero-shot Planning , author=. 2025 , eprint=
2025
-
[9]
2023 , eprint=
Self-Supervised Learning from Images with a Joint-Embedding Predictive Architecture , author=. 2023 , eprint=
2023
-
[10]
2026 , eprint=
LeWorldModel: Stable End-to-End Joint-Embedding Predictive Architecture from Pixels , author=. 2026 , eprint=
2026
-
[11]
2022 , eprint=
Investigating Compounding Prediction Errors in Learned Dynamics Models , author=. 2022 , eprint=
2022
-
[12]
2019 , eprint=
Learning to Combat Compounding-Error in Model-Based Reinforcement Learning , author=. 2019 , eprint=
2019
-
[13]
2025 , eprint=
WorldGym: World Model as An Environment for Policy Evaluation , author=. 2025 , eprint=
2025
-
[14]
2024 , eprint=
DINOv2: Learning Robust Visual Features without Supervision , author=. 2024 , eprint=
2024
-
[15]
2025 , eprint=
EmbeddingGemma: Powerful and Lightweight Text Representations , author=. 2025 , eprint=
2025
-
[16]
2021 , eprint=
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale , author=. 2021 , eprint=
2021
-
[17]
2025 , eprint=
Gemini 2.5: Pushing the Frontier with Advanced Reasoning, Multimodality, Long Context, and Next Generation Agentic Capabilities , author=. 2025 , eprint=
2025
-
[18]
2025 , eprint=
SIMA 2: A Generalist Embodied Agent for Virtual Worlds , author=. 2025 , eprint=
2025
-
[19]
2026 , eprint=
RoboReward: General-Purpose Vision-Language Reward Models for Robotics , author=. 2026 , eprint=
2026
-
[20]
International Conference on Machine Learning (ICML) , year =
Learning Latent Dynamics for Planning from Pixels , author =. International Conference on Machine Learning (ICML) , year =
-
[21]
2026 , eprint=
CLIP Behaves like a Bag-of-Words Model Cross-modally but not Uni-modally , author=. 2026 , eprint=
2026
-
[22]
2022 , eprint=
R3M: A Universal Visual Representation for Robot Manipulation , author=. 2022 , eprint=
2022
-
[23]
International Conference on Learning Representations (ICLR) , year =
Dream to Control: Learning Behaviors by Latent Imagination , author =. International Conference on Learning Representations (ICLR) , year =
-
[24]
Nature , volume=
Mastering diverse control tasks through world models , author=. Nature , volume=. 2025 , publisher=
2025
-
[25]
International Conference on Machine Learning (ICML) , year =
Temporal Difference Learning for Model Predictive Control , author =. International Conference on Machine Learning (ICML) , year =
-
[26]
Hansen, Nicklas and others , booktitle =
-
[27]
International Conference on Machine Learning (ICML) , year =
Planning with Diffusion for Flexible Behavior Synthesis , author =. International Conference on Machine Learning (ICML) , year =
-
[28]
The Twelfth International Conference on Learning Representations , year=
Simple Hierarchical Planning with Diffusion , author=. The Twelfth International Conference on Learning Representations , year=
-
[29]
The Twelfth International Conference on Learning Representations , year=
Language Control Diffusion: Efficiently Scaling through Space, Time, and Tasks , author=. The Twelfth International Conference on Learning Representations , year=
-
[30]
International Conference on Learning Representations (ICLR) , year =
Diffusion Models for Decision Making and Planning , author =. International Conference on Learning Representations (ICLR) , year =
-
[31]
International Conference on Learning Representations (ICLR) , year =
THICK: Learning Hierarchical Latent Dynamics for Temporal Abstraction , author =. International Conference on Learning Representations (ICLR) , year =
-
[32]
Conference on Robot Learning (CoRL) , year =
Latent Actions for Efficient Planning , author =. Conference on Robot Learning (CoRL) , year =
-
[33]
International Conference on Learning Representations (ICLR) , year =
Skill Diffusion: Learning Reusable Skills via Diffusion , author =. International Conference on Learning Representations (ICLR) , year =
-
[34]
International Conference on Machine Learning (ICML) , year =
AdaWorld: Adaptive World Models for Efficient Planning under Distribution Shift , author =. International Conference on Machine Learning (ICML) , year =
-
[35]
arXiv preprint arXiv:2306.xxxxx , year =
World Models: A Survey , author =. arXiv preprint arXiv:2306.xxxxx , year =
-
[36]
International Conference on Machine Learning (ICML) , year =
GenWorld: Generalist World Models for Multi-Task Learning , author =. International Conference on Machine Learning (ICML) , year =
-
[37]
The Twelfth International Conference on Learning Representations , year=
Vision-Language Models are Zero-Shot Reward Models for Reinforcement Learning , author=. The Twelfth International Conference on Learning Representations , year=
-
[38]
Conference on Robot Learning , pages=
Rt-2: Vision-language-action models transfer web knowledge to robotic control , author=. Conference on Robot Learning , pages=. 2023 , organization=
2023
-
[39]
Proceedings of the 40th International Conference on Machine Learning , pages=
PaLM-E: an embodied multimodal language model , author=. Proceedings of the 40th International Conference on Machine Learning , pages=
-
[40]
International Conference on Machine Learning (ICML) , year =
RL-VLM-F: Reinforcement Learning with Vision-Language Foundation Models , author =. International Conference on Machine Learning (ICML) , year =
-
[41]
International Conference on Machine Learning (ICML) , year =
Code as Reward: Transforming Vision-Language Feedback into Dense Reward Functions , author =. International Conference on Machine Learning (ICML) , year =
-
[42]
2025 , eprint=
Revisiting the Learning Objectives of Vision-Language Reward Models , author=. 2025 , eprint=
2025
-
[43]
Ha, David and Schmidhuber, Jürgen , title =. 2018 , copyright =. doi:10.5281/ZENODO.1207631 , url =
-
[44]
2024 , eprint=
Vision-Language Models are Zero-Shot Reward Models for Reinforcement Learning , author=. 2024 , eprint=
2024
-
[45]
2025 , eprint=
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning , author=. 2025 , eprint=
2025
-
[46]
2026 , eprint=
Latent Particle World Models: Self-supervised Object-centric Stochastic Dynamics Modeling , author=. 2026 , eprint=
2026
-
[47]
2025 , eprint=
Navigation World Models , author=. 2025 , eprint=
2025
-
[48]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Constitutional AI: Harmlessness from AI Feedback , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[49]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Training Language Models to Follow Instructions with Human Feedback , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[50]
Conference on Robot Learning (CoRL) , year =
Inner Monologue: Embodied Reasoning through Planning with Language Models , author =. Conference on Robot Learning (CoRL) , year =
-
[51]
Robotics: Science and Systems (RSS) , year =
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances , author =. Robotics: Science and Systems (RSS) , year =
-
[52]
Conference on Robot Learning (CoRL) , year =
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control , author =. Conference on Robot Learning (CoRL) , year =
-
[53]
International Conference on Learning Representations (ICLR) , year =
Hierarchical Diffuser: Efficient Long-Horizon Planning with Temporal Abstractions , author =. International Conference on Learning Representations (ICLR) , year =
-
[54]
Advances in Neural Information Processing Systems (NeurIPS) , year =
HiP: Hierarchical Planning with Foundation Models , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[55]
Artificial Intelligence , year =
Between MDPs and Semi-MDPs: A Framework for Temporal Abstraction in Reinforcement Learning , author =. Artificial Intelligence , year =
-
[56]
International Conference on Machine Learning (ICML) , year =
FeUdal Networks for Hierarchical Reinforcement Learning , author =. International Conference on Machine Learning (ICML) , year =
-
[57]
2025 , eprint=
Learning from Reward-Free Offline Data: A Case for Planning with Latent Dynamics Models , author=. 2025 , eprint=
2025
-
[58]
2026 , eprint=
stable-worldmodel-v1: Reproducible World Modeling Research and Evaluation , author=. 2026 , eprint=
2026
-
[59]
2025 , eprint=
OGBench: Benchmarking Offline Goal-Conditioned RL , author=. 2025 , eprint=
2025
-
[60]
2026 , eprint=
Temporal Straightening for Latent Planning , author=. 2026 , eprint=
2026
-
[61]
2025 , eprint=
LeJEPA: Provable and Scalable Self-Supervised Learning Without the Heuristics , author=. 2025 , eprint=
2025
-
[62]
2023 , eprint=
LIV: Language-Image Representations and Rewards for Robotic Control , author=. 2023 , eprint=
2023
-
[63]
2025 , eprint=
Perception Encoder: The best visual embeddings are not at the output of the network , author=. 2025 , eprint=
2025
-
[64]
2024 , eprint=
RL-VLM-F: Reinforcement Learning from Vision Language Foundation Model Feedback , author=. 2024 , eprint=
2024
-
[65]
2025 , eprint=
Robo-Dopamine: General Process Reward Modeling for High-Precision Robotic Manipulation , author=. 2025 , eprint=
2025
-
[66]
IEEE International Conference on Robotics and Automation (ICRA) , year=
IRIS: Implicit Reinforcement without Interaction at Scale for Learning Control from Offline Robot Manipulation Data , author=. IEEE International Conference on Robotics and Automation (ICRA) , year=
-
[67]
Novaflow: Zero-shot manipulation via actionable flow from generated videos , author=. arXiv preprint arXiv:2510.08568 , year=
-
[68]
Forty-first International Conference on Machine Learning , year=
Genie: Generative interactive environments , author=. Forty-first International Conference on Machine Learning , year=
-
[69]
Conference on Robot Learning , pages=
CHD: Coupled Hierarchical Diffusion for Long-Horizon Tasks , author=. Conference on Robot Learning , pages=. 2025 , organization=
2025
-
[70]
Advances in Neural Information Processing Systems , volume=
Deep hierarchical planning from pixels , author=. Advances in Neural Information Processing Systems , volume=
-
[71]
Proceedings of the 37th International Conference on Machine Learning , pages =
Planning to Explore via Self-Supervised World Models , author =. Proceedings of the 37th International Conference on Machine Learning , pages =. 2020 , editor =
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.