An End-to-End Encrypted Control Pipeline for Multi-Agent Coordination via CKKS Homomorphic Encryption
Pith reviewed 2026-06-27 21:11 UTC · model grok-4.3
The pith
Multi-agent formation control runs entirely on encrypted data and stays stable with tracking error bounded by bootstrapping precision and spectral radius.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors present a pipeline that performs all stages of multi-agent coordination on CKKS-encrypted data and prove that the closed-loop system remains stable with a bounded steady-state tracking error. The error ball is obtained by decoupling controller and observer dynamics under the separation principle and modeling each bootstrapping step as an impulsive disturbance; the resulting expression depends only on the bootstrapping precision and the spectral radius of the closed-loop matrix, directly relating encryption parameters to achievable accuracy.
What carries the argument
The periodic bootstrapping bound, obtained by treating CKKS bootstrapping as impulsive disturbances and applying the separation principle to decouple error dynamics, which produces the explicit steady-state error ball.
If this is right
- The closed-loop system maintains stability and bounded tracking error under encryption in the formation control scenario.
- The steady-state error ball supplies a direct design equation that lets engineers set bootstrapping precision to meet a target accuracy.
- The diagonal Laplacian method unifies handling of ring, torus, and complete-graph communication topologies at cost linear in the number of nonzero diagonals.
- Steady-state Kalman gains allow the entire pipeline to avoid solving matrix equations online while operating on encrypted data.
Where Pith is reading between the lines
- The same error-bound approach could be tested on other distributed tasks such as rendezvous or coverage control to check whether the spectral-radius dependence remains predictive.
- Reducing bootstrapping frequency in proportion to the spectral radius might lower total computation while preserving the error guarantee.
- The pipeline's reliance on fixed gains suggests it could be combined with event-triggered communication to further reduce encrypted arithmetic cost.
Load-bearing premise
The separation principle continues to decouple controller and observer dynamics when the system is driven by the impulsive disturbances introduced by periodic CKKS bootstrapping.
What would settle it
Run the reported multi-agent formation control experiment; if the observed tracking error grows without bound or exceeds the predicted steady-state ball for the chosen bootstrapping precision and spectral radius, the bound and stability claim are falsified.
Figures

read the original abstract
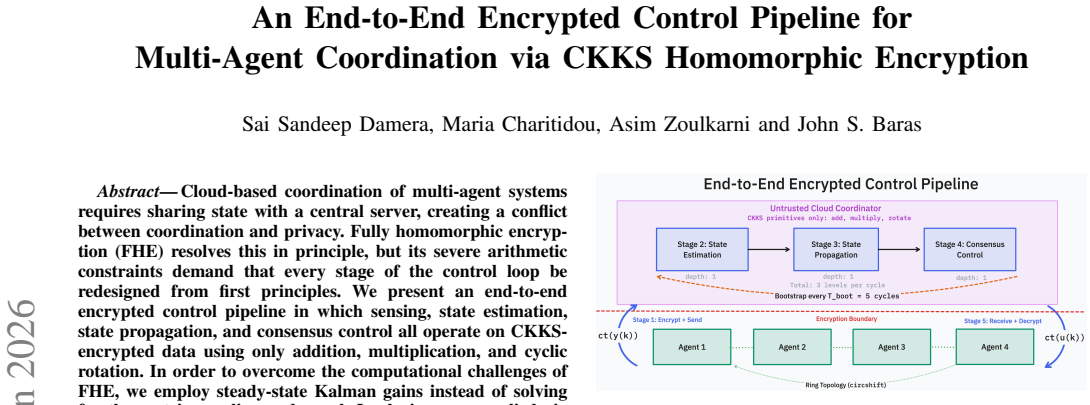
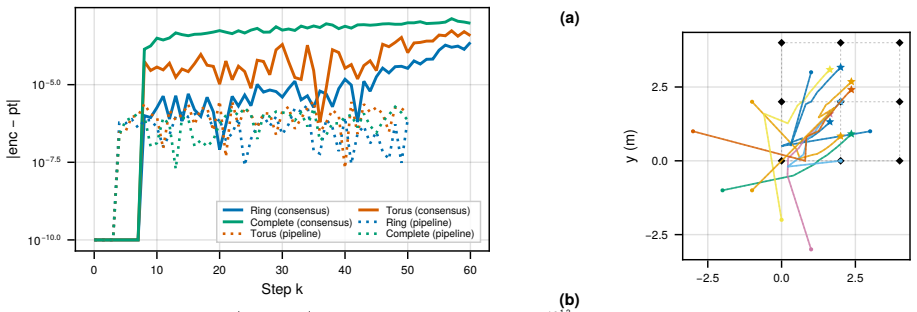
Cloud-based coordination of multi-agent systems requires sharing state with a central server, creating a conflict between coordination and privacy. Fully homomorphic encryption (FHE) resolves this in principle, but its severe arithmetic constraints demand that every stage of the control loop be redesigned from first principles. We present an end-to-end encrypted control pipeline in which sensing, state estimation, state propagation, and consensus control all operate on CKKS-encrypted data using only addition, multiplication, and cyclic rotation. In order to overcome the computational challenges of FHE, we employ steady-state Kalman gains instead of solving for the matrices online and graph Laplacians are applied via the diagonal method at a cost proportional to the number of nonzero cyclic diagonals, accommodating ring, torus, and complete-graph topologies within a unified framework. To quantify the cumulative effect of encryption noise, we use the separation principle to decouple controller and observer error dynamics and derive a periodic bootstrapping bound in which CKKS bootstrapping acts as an impulsive disturbance; the resulting steady-state error ball depends on the bootstrapping precision and the closed-loop spectral radius, providing a direct design equation for the privacy-accuracy tradeoff. The pipeline is validated on a multi-agent formation control scenario, confirming stable closed-loop operation under encryption with bounded tracking error.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an end-to-end encrypted control pipeline for multi-agent coordination using CKKS homomorphic encryption. Sensing, state estimation, propagation, and consensus control are redesigned to operate solely on encrypted data via addition, multiplication, and cyclic rotation. Steady-state Kalman gains replace online Riccati solutions, and graph Laplacians are implemented via the diagonal method at cost proportional to nonzero cyclic diagonals. The separation principle is invoked to decouple controller and observer dynamics under periodic CKKS bootstrapping (treated as impulsive disturbances), yielding a steady-state error ball that depends only on bootstrapping precision and closed-loop spectral radius. The pipeline is validated on a multi-agent formation-control scenario demonstrating stable closed-loop behavior with bounded tracking error.
Significance. If the central derivation holds, the work supplies a concrete, computable design equation linking encryption parameters to closed-loop accuracy for privacy-preserving multi-agent control. The choice of steady-state gains and the unified diagonal-Laplacian treatment for ring/torus/complete graphs are practical strengths that address FHE arithmetic constraints directly.
major comments (1)
- [Abstract] Abstract (and the derivation of the periodic bootstrapping bound): the claim that the separation principle continues to produce a block-diagonal error dynamics structure when CKKS bootstrapping injects periodic impulsive disturbances is load-bearing for the stated error-ball formula. The manuscript must exhibit the explicit augmented state-space model (or the corresponding Lyapunov or spectral-radius argument) showing that the impulses do not introduce cross terms between controller and observer errors; without this step the design equation for the privacy-accuracy tradeoff rests on an unverified assumption.
minor comments (2)
- The abstract refers to 'the diagonal method' for Laplacian application; the main text should supply the precise algorithmic definition and complexity count (number of nonzero cyclic diagonals) with a short pseudocode or matrix illustration.
- Clarify whether the steady-state Kalman gains are computed in the clear and then encrypted once, or whether any encrypted Riccati iteration is performed; the former is implied but should be stated explicitly.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for identifying the need for an explicit verification of the separation principle under periodic bootstrapping. We address the concern below.
read point-by-point responses
-
Referee: [Abstract] Abstract (and the derivation of the periodic bootstrapping bound): the claim that the separation principle continues to produce a block-diagonal error dynamics structure when CKKS bootstrapping injects periodic impulsive disturbances is load-bearing for the stated error-ball formula. The manuscript must exhibit the explicit augmented state-space model (or the corresponding Lyapunov or spectral-radius argument) showing that the impulses do not introduce cross terms between controller and observer errors; without this step the design equation for the privacy-accuracy tradeoff rests on an unverified assumption.
Authors: We agree that the manuscript would benefit from an explicit augmented state-space representation to confirm that the periodic bootstrapping impulses preserve the block-diagonal structure of the error dynamics. In the revised version we will add the augmented closed-loop model (observer error, controller error, and the periodic impulse terms) and show that the cross-coupling blocks remain zero because the bootstrapping operation is applied separately to the encrypted state estimate and the encrypted control input; the resulting Lyapunov or spectral-radius argument for the steady-state error ball will then follow directly from the decoupled subsystems. revision: yes
Circularity Check
No circularity: derivation applies standard separation principle to independent quantities
full rationale
The paper's central derivation applies the separation principle (a standard control-theoretic result) to decouple controller and observer dynamics when treating CKKS bootstrapping as an impulsive disturbance, yielding a steady-state error ball expressed in terms of bootstrapping precision and closed-loop spectral radius. These quantities are treated as external inputs rather than being defined in terms of the final bound itself. No self-definitional steps, fitted inputs renamed as predictions, or load-bearing self-citations appear in the provided derivation chain. The result is therefore self-contained against external benchmarks and does not reduce to its inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (2)
- bootstrapping precision
- steady-state Kalman gains
axioms (2)
- domain assumption Separation principle holds for error dynamics under CKKS bootstrapping noise
- domain assumption Graph Laplacians admit a cyclic-diagonal representation for ring, torus, and complete graphs
Reference graph
Works this paper leans on
-
[1]
Homomorphic encryption for arithmetic of approximate numbers,
J. H. Cheon, A. Kim, M. Kim, and Y . Song, “Homomorphic encryption for arithmetic of approximate numbers,” inInternational conference on the theory and application of cryptology and information security, pp. 409–437, Springer, 2017
2017
-
[2]
Secure numerical compu- tations using fully homomorphic encryption,
M. Schlottke-Lakemper and A. Kholod, “Secure numerical compu- tations using fully homomorphic encryption,” 2024. JuliaCon 2024, Eindhoven, 10th July 2024
2024
-
[3]
Cyber-security enhancement of networked control systems using homomorphic encryption,
K. Kogiso and T. Fujita, “Cyber-security enhancement of networked control systems using homomorphic encryption,” in54th IEEE Con- ference on Decision and Control (CDC), pp. 6836–6843, IEEE, 2015
2015
-
[4]
Secure and private cloud-based control using semi-homomorphic encryption,
F. Farokhi, I. Shames, and N. Batterham, “Secure and private cloud-based control using semi-homomorphic encryption,”IFAC- PapersOnLine, vol. 49, no. 22, pp. 163–168, 2016
2016
-
[5]
Towards privacy-preserving cooperative control via encrypted distributed optimization,
P. Binfetet al., “Towards privacy-preserving cooperative control via encrypted distributed optimization,”at-Automatisierungstechnik, vol. 71, no. 9, pp. 736–747, 2023
2023
-
[6]
Dprive: Data protection in virtual environments
DARPA, “Dprive: Data protection in virtual environments.”
-
[7]
Encrypting controller using fully homomorphic en- cryption for security of cyber-physical systems,
J. Kimet al., “Encrypting controller using fully homomorphic en- cryption for security of cyber-physical systems,”IFAC-PapersOnLine, vol. 49, no. 22, pp. 175–180, 2016
2016
-
[8]
A code-driven tutorial on encrypted control: From pioneering realizations to modern implementations,
N. Schl ¨uteret al., “A code-driven tutorial on encrypted control: From pioneering realizations to modern implementations,” in2024 European Control Conference (ECC), pp. 914–920, IEEE, 2024
2024
-
[9]
Cloud-based mpc with encrypted data,
A. B. Alexandru, M. Morari, and G. J. Pappas, “Cloud-based mpc with encrypted data,” in2018 IEEE conference on decision and control (CDC), pp. 5014–5019, IEEE, 2018
2018
-
[10]
Algorithms in helib,
S. Halevi and V . Shoup, “Algorithms in helib,” inAnnual Cryptology Conference, pp. 554–571, Springer, 2014
2014
-
[11]
Consensus problems in networks of agents with switching topology and time-delays,
R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,”IEEE Transac- tions on automatic control, vol. 49, no. 9, pp. 1520–1533, 2004
2004
-
[12]
OpenFHE.jl: Fully homomorphic encryption in Julia using OpenFHE
M. Schlottke-Lakemper, “OpenFHE.jl: Fully homomorphic encryption in Julia using OpenFHE.”https://github.com/hpsc-lab/ OpenFHE.jl, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.