UniTriSplat: A Unified 3D Gaussian Splatting Framework with Uniform Spherical Rasterization for Universal Cameras
Pith reviewed 2026-06-30 06:17 UTC · model grok-4.3
The pith
UniTriSplat unifies 3D Gaussian splatting for any camera by rasterizing on a HEALPix spherical grid.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
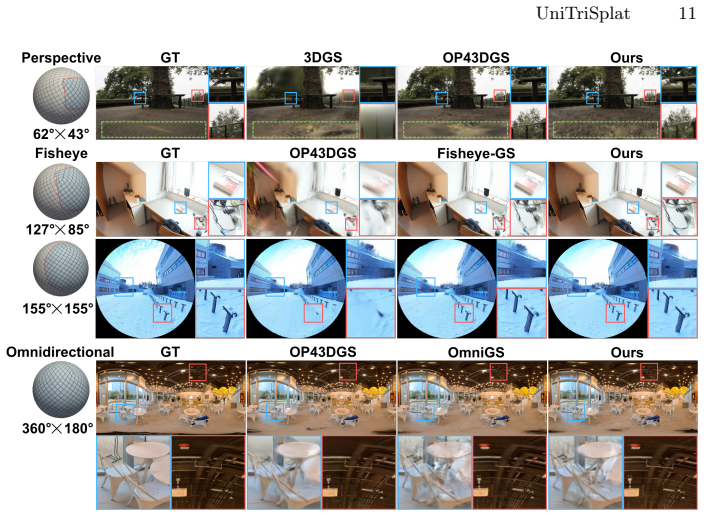
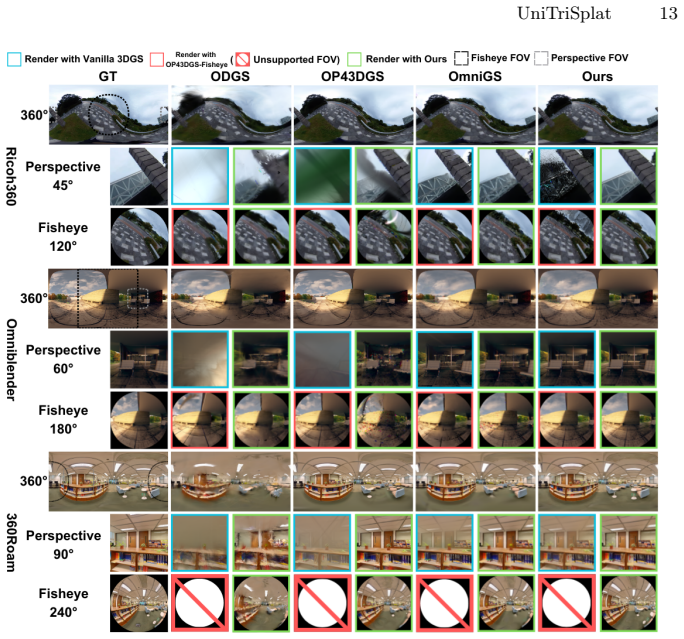
By reformulating Gaussian splatting on the unit sphere via HEALPix discretization and deriving forward rendering and gradient propagation directly in the spherical radian domain, UniTriSplat yields uniform optimization behavior from narrow-FoV images to full 360-degree panoramas while improving cross-camera generalization.
What carries the argument
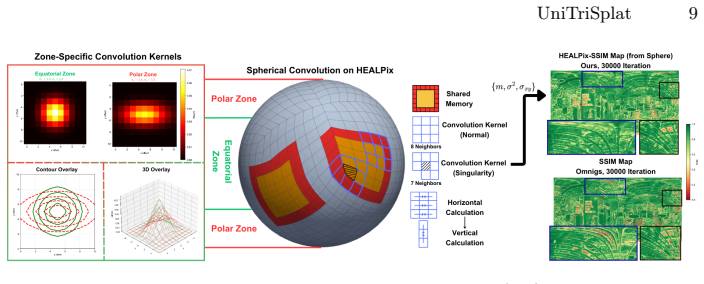
HEALPix equal-area discretization of the unit sphere, used to build a sampling grid that aligns with input angular resolution so that 3D Gaussians can be projected, rasterized, and differentiated entirely in spherical radian space.
If this is right
- A single set of 3D Gaussians can be optimized from any mixture of camera models without per-model adjustments.
- Rendering quality remains stable when the same scene is viewed from narrow to full-sphere angles.
- Geometric fidelity is preserved because projection and differentiation occur in a common angular domain.
- The HEALPix-aware SSIM term produces perceptually better images on omnidirectional inputs.
Where Pith is reading between the lines
- Mixed-device capture pipelines could drop the need for separate calibration or model branches.
- The same spherical formulation might transfer to time-varying or dynamic Gaussian scenes without re-deriving camera-specific code.
- Real-time viewers for VR or robotics could adopt one renderer that accepts arbitrary lens parameters at inference time.
Load-bearing premise
The HEALPix grid matches every camera's angular sampling density closely enough that no systematic geometric or appearance bias is introduced.
What would settle it
A controlled test set of the same scene captured with both narrow-FoV and fisheye cameras where the spherical method shows measurably higher reprojection error or slower per-Gaussian convergence than a camera-specific baseline.
Figures

read the original abstract
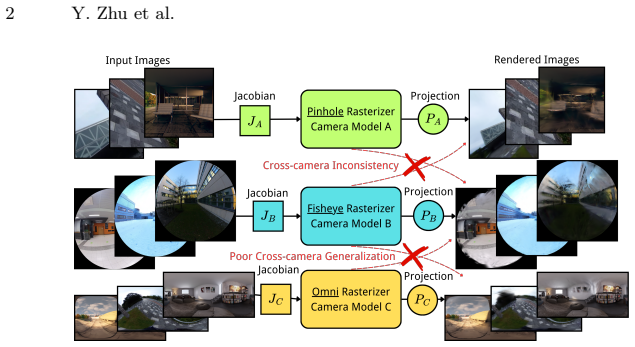
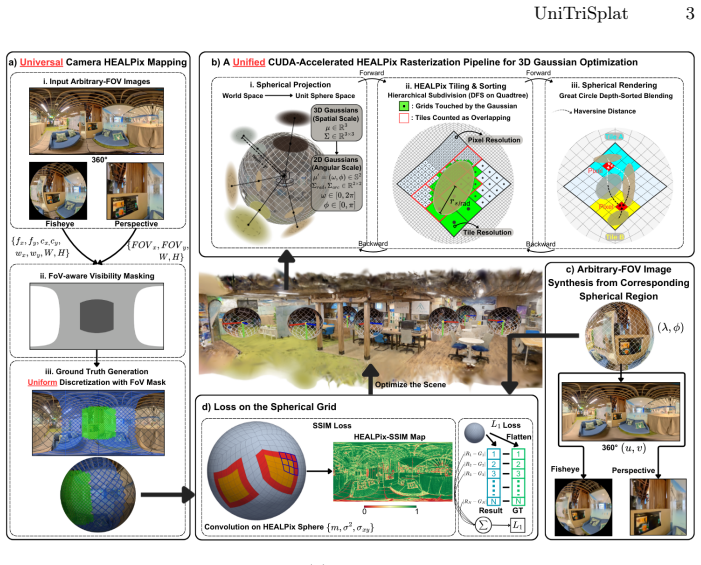
Existing 3D Gaussian Splatting (3DGS) frameworks rely on camera-specific rasterization, suffering from inconsistent solid-angle sampling and degraded performance across heterogeneous camera models (e.g., perspective, fisheye, omnidirectional). To address this limitation, we propose UniTriSplat, a unified 3DGS framework for universal cameras that reformulates Gaussian splatting on the unit sphere via HEALPix discretization. Leveraging the equal-area property of HEALPix, we construct a spherical sampling grid aligned with the angular resolution of input images. We derive the forward rendering and gradient propagation of Gaussians directly in the spherical radian domain, yielding uniform optimization behavior from narrow-FoV images to full 360-degree panoramas. To enhance perceptual reconstruction quality, we additionally introduce a HEALPix-aware SSIM loss that respects spherical neighborhood structure. Extensive experiments across diverse camera models demonstrate that UniTriSplat consistently improves cross-camera generalization while preserving geometric fidelity and rendering quality.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes UniTriSplat, a unified 3D Gaussian Splatting framework that reformulates splatting on the unit sphere via HEALPix discretization to support arbitrary camera models (perspective, fisheye, omnidirectional). It constructs an equal-area spherical sampling grid claimed to align with input angular resolution, derives forward rendering and gradient propagation directly in the spherical radian domain, and adds a HEALPix-aware SSIM loss. The central claim is that this yields uniform optimization behavior and improved cross-camera generalization while preserving geometric fidelity.
Significance. If the spherical-domain derivations and alignment procedure hold without introducing systematic sampling bias, the result would be significant for practical 3D reconstruction pipelines that must handle heterogeneous cameras, removing the need for camera-specific rasterizers and enabling consistent solid-angle weighting from narrow-FoV to 360° data.
major comments (2)
- [§3] §3 (spherical discretization): The claim that HEALPix produces a grid 'aligned with the angular resolution of input images' for universal cameras is load-bearing for the uniformity result. HEALPix uses fixed hierarchical equal-area iso-latitude cells whose boundaries are independent of the camera projection; for nonlinear models the image-to-sphere mapping can cause multiple pixels to collapse into one cell (or vice versa) in a non-uniform manner. The manuscript must supply the explicit level-selection procedure, the solid-angle weighting formula, and a verification that no density bias is introduced.
- [§5] §5 (experiments): The reported cross-camera generalization improvements rest on the assumption that the HEALPix grid preserves geometric fidelity for all tested models. Without an ablation that varies HEALPix resolution independently of camera FoV and reports both PSNR and angular error metrics, it is impossible to confirm that the gains are due to the spherical reformulation rather than incidental hyper-parameter effects.
minor comments (2)
- The abstract states that the grid is 'aligned with the angular resolution of input images' but does not define the alignment metric; a short clarifying sentence would help readers.
- [§3] Notation for the spherical radian domain (e.g., the exact definition of the Gaussian covariance on the sphere) should be introduced before the forward-rendering equations to avoid ambiguity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which helps strengthen the clarity and rigor of our claims regarding the HEALPix-based spherical discretization in UniTriSplat. We address each major comment below and will incorporate the requested details and experiments in the revised manuscript.
read point-by-point responses
-
Referee: [§3] §3 (spherical discretization): The claim that HEALPix produces a grid 'aligned with the angular resolution of input images' for universal cameras is load-bearing for the uniformity result. HEALPix uses fixed hierarchical equal-area iso-latitude cells whose boundaries are independent of the camera projection; for nonlinear models the image-to-sphere mapping can cause multiple pixels to collapse into one cell (or vice versa) in a non-uniform manner. The manuscript must supply the explicit level-selection procedure, the solid-angle weighting formula, and a verification that no density bias is introduced.
Authors: We agree that the level-selection procedure, solid-angle weighting, and bias verification must be stated explicitly to support the uniformity claim. In the revision we will add to §3: (i) the precise algorithm for choosing the HEALPix level from the median angular resolution derived from each camera’s intrinsics and image size; (ii) the solid-angle weighting formula that multiplies each Gaussian’s contribution by the steradian area of its assigned HEALPix cell; and (iii) a quantitative verification subsection that measures pixel-to-cell occupancy histograms for all tested camera models and reports the resulting density variance, confirming absence of systematic bias. These additions will be placed before the rendering equations. revision: yes
-
Referee: [§5] §5 (experiments): The reported cross-camera generalization improvements rest on the assumption that the HEALPix grid preserves geometric fidelity for all tested models. Without an ablation that varies HEALPix resolution independently of camera FoV and reports both PSNR and angular error metrics, it is impossible to confirm that the gains are due to the spherical reformulation rather than incidental hyper-parameter effects.
Authors: We acknowledge that an ablation isolating HEALPix resolution from camera FoV is required to attribute gains to the spherical reformulation. We will insert into §5 a dedicated ablation table in which HEALPix level is varied independently while camera models and FoVs are held fixed; both PSNR (rendering quality) and mean angular error (geometric fidelity) will be reported for each level. The results will be discussed to show that performance improvements track the uniformity property rather than incidental hyper-parameter choices. revision: yes
Circularity Check
No circularity: derivation is a direct reformulation independent of target results
full rationale
The paper derives forward rendering and gradient propagation for 3D Gaussians directly in the spherical radian domain after reformulating splatting via HEALPix equal-area discretization. No equations reduce a claimed prediction or uniqueness result to a fitted parameter or self-citation by construction. The central claims rest on the equal-area property of HEALPix (an external standard) and explicit derivations in spherical coordinates, with no load-bearing self-citations or renaming of known empirical patterns. The method is self-contained against external benchmarks and does not invoke prior author work to force its own choices.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Bai, J., Huang, L., Guo, J., Gong, W., Li, Y., Guo, Y.: 360-gs: Layout-guided panoramicgaussiansplattingforindoorroaming.In:2025InternationalConference on 3D Vision (3DV). pp. 1042–1053. IEEE (2025)
2025
-
[2]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Barron, J.T., Mildenhall, B., Verbin, D., Srinivasan, P.P., Hedman, P.: Mip- nerf 360: Unbounded anti-aliased neural radiance fields. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 5470–5479 (2022)
2022
-
[3]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Carlsson, O., Gerken, J.E., Linander, H., Spieß, H., Ohlsson, F., Petersson, C., Persson, D.: Heal-swin: A vision transformer on the sphere. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 6067– 6077 (2024)
2024
-
[4]
In: Proceedings of the 22nd annual conference on Computer graphics and interactive techniques
Chen, S.E.: Quicktime vr: An image-based approach to virtual environment navi- gation. In: Proceedings of the 22nd annual conference on Computer graphics and interactive techniques. pp. 29–38 (1995)
1995
-
[5]
arXiv preprint arXiv:2510.01785 (2025)
Cheng, X., Subramaniam, A., Wu, S., Brenowitz, N.: cuhpx: Gpu-accelerated differentiable spherical harmonic transforms on healpix grids. arXiv preprint arXiv:2510.01785 (2025)
-
[6]
arXiv preprint arXiv:2202.04942 (2022)
Cho, S., Jung, R., Kwon, J.: Spherical transformer. arXiv preprint arXiv:2202.04942 (2022)
-
[7]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Choi, C., Kim, S.M., Kim, Y.M.: Balanced spherical grid for egocentric view syn- thesis. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 16590–16599 (2023)
2023
-
[8]
In: Proceedings of the European conference on computer vision (ECCV)
Coors, B., Condurache, A.P., Geiger, A.: Spherenet: Learning spherical represen- tations for detection and classification in omnidirectional images. In: Proceedings of the European conference on computer vision (ECCV). pp. 518–533 (2018)
2018
-
[9]
MIT press (2022)
Cormen, T.H., Leiserson, C.E., Rivest, R.L., Stein, C.: Introduction to algorithms. MIT press (2022)
2022
-
[10]
In: Pro- ceedings of the IEEE/CVF International Conference on Computer Vision
Deng, Y., Xian, W., Yang, G., Guibas, L., Wetzstein, G., Marschner, S., Debevec, P.: Self-calibrating gaussian splatting for large field-of-view reconstruction. In: Pro- ceedings of the IEEE/CVF International Conference on Computer Vision. pp. 25124–25133 (2025)
2025
-
[11]
The Astrophysical Journal622(2), 759–771 (2005)
Gorski, K.M., Hivon, E., Banday, A.J., Wandelt, B.D., Hansen, F.K., Reinecke, M., Bartelmann, M.: Healpix: A framework for high-resolution discretization and fast analysis of data distributed on the sphere. The Astrophysical Journal622(2), 759–771 (2005)
2005
-
[12]
IEEE computer graphics and Applications6(11), 21–29 (1986)
Greene, N.: Environment mapping and other applications of world projections. IEEE computer graphics and Applications6(11), 21–29 (1986)
1986
-
[14]
IEEE Robotics and Automation Letters11(3), 3079–3086 (2026)
Guo, X., Xu, Y., Huang, H., Yeung, S.K.: 360dvo: Deep visual odometry for monoc- ular 360-degree camera. IEEE Robotics and Automation Letters11(3), 3079–3086 (2026)
2026
-
[15]
In: The Thirteenth In- ternational Conference on Learning Representations (2025) UniTriSplat 17
Huang, H., Chen, Y., Li, L., Cheng, H., Braud, T., Zhao, Y., Yeung, S.K.: Sc- omnigs: Self-calibrating omnidirectional gaussian splatting. In: The Thirteenth In- ternational Conference on Learning Representations (2025) UniTriSplat 17
2025
-
[16]
360Roam: Real- Time Indoor Roaming Using Geometry-Aware 360° Radiance Fields,
Huang, H., Chen, Y., Zhang, T., Yeung, S.K.: 360roam: Real-time indoor roaming using geometry-aware 360◦ radiance fields. arXiv preprint arXiv:2208.02705 (2022)
-
[17]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition
Huang, H., Liu, C., Zhu, Y., Cheng, H., Braud, T., Yeung, S.K.: 360loc: A dataset and benchmark for omnidirectional visual localization with cross-device queries. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition. pp. 22314–22324 (2024)
2024
-
[18]
In: Proceedings of the IEEE/CVF Interna- tional Conference on Computer Vision
Huang, H., Xu, Y., Chen, Y., Yeung, S.K.: 360vot: A new benchmark dataset for omnidirectional visual object tracking. In: Proceedings of the IEEE/CVF Interna- tional Conference on Computer Vision. pp. 20566–20576 (2023)
2023
-
[19]
In: European conference on computer vision
Huang, L., Bai, J., Guo, J., Li, Y., Guo, Y.: On the error analysis of 3d gaussian splatting and an optimal projection strategy. In: European conference on computer vision. pp. 247–263. Springer (2024)
2024
-
[20]
In: 2025 IEEE International Conference on Image Processing (ICIP)
Ito, S., Takama, N., Ito, K., Chen, H.T., Aoki, T.: Erpgs: Equirectangular image rendering enhanced with 3d gaussian regularization. In: 2025 IEEE International Conference on Image Processing (ICIP). pp. 2850–2855. IEEE (2025)
2025
-
[21]
arXiv preprint arXiv:2401.16663 (2024)
Jiang, Y., Yu, C., Xie, T., Li, X., Feng, Y., Wang, H., Li, M., Lau, H., Gao, F., Yang, Y., Jiang, C.: Vr-gs: A physical dynamics-aware interactive gaussian splatting system in virtual reality. arXiv preprint arXiv:2401.16663 (2024)
-
[22]
yin-yang grid
Kageyama, A., Sato, T.: “yin-yang grid”: An overset grid in spherical geometry. Geochemistry, Geophysics, Geosystems5(9) (2004)
2004
-
[23]
ACM Trans
Kerbl, B., Kopanas, G., Leimkühler, T., Drettakis, G., et al.: 3d gaussian splatting for real-time radiance field rendering. ACM Trans. Graph.42(4), 139–1 (2023)
2023
-
[24]
Astron- omy & Astrophysics628, A129 (2019)
Krachmalnicoff, N., Tomasi, M.: Convolutional neural networks on the healpix sphere: a pixel-based algorithm and its application to cmb data analysis. Astron- omy & Astrophysics628, A129 (2019)
2019
-
[25]
Advances in Neural Information Processing Systems37, 57050–57075 (2024)
Lee, S., Chung, J., Huh, J., Lee, K.M.: Odgs: 3d scene reconstruction from om- nidirectional images with 3d gaussian splattings. Advances in Neural Information Processing Systems37, 57050–57075 (2024)
2024
-
[26]
In: Proceedings of the Computer Vision and Pattern Recogni- tion Conference
Lee, S., Chung, J., Kim, K., Huh, J., Lee, G., Lee, M., Lee, K.M.: Omnisplat: Taming feed-forward 3d gaussian splatting for omnidirectional images with ed- itable capabilities. In: Proceedings of the Computer Vision and Pattern Recogni- tion Conference. pp. 16356–16365 (2025)
2025
-
[27]
In: Computer Graphics Forum
Li, J., Hahlbohm, F., Scholz, T., Eisemann, M., Tauscher, J.P., Magnor, M.: Spags: Fast and accurate 3d gaussian splatting for spherical panoramas. In: Computer Graphics Forum. vol. 44, p. e70171. Wiley Online Library (2025)
2025
-
[28]
In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV)
Li, L., Huang, H., Yeung, S.K., Cheng, H.: Omnigs: Fast radiance field recon- struction using omnidirectional gaussian splatting. In: 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV). pp. 2260–2268. IEEE (2025)
2025
-
[29]
Liao, Z., Chen, S., Fu, R., Wang, Y., Su, Z., Luo, H., Ma, L., Xu, L., Dai, B., Li, H., et al.: Fisheye-gs: Lightweight and extensible gaussian splatting module for fisheye cameras. arXiv preprint arXiv:2409.04751 (2024)
-
[30]
arXiv preprint arXiv:2511.04283 , year=
Ren, S., Wen, T., Fang, Y., Lu, B.: Fastgs: Training 3d gaussian splatting in 100 seconds. arXiv preprint arXiv:2511.04283 (2025)
-
[31]
Monthly Weather Review96(6), 351–356 (1968)
Sadourny, R., Arakawa, A., Mintz, Y.: Integration of the nondivergent barotropic vorticity equation with an icosahedral-hexagonal grid for the sphere. Monthly Weather Review96(6), 351–356 (1968)
1968
-
[32]
In: Proceedings of the IEEE/CVF Inter- national Conference on Computer Vision
Shin, C., Cho, W.O., Kim, S.J.: Seam360gs: Seamless 360deg gaussian splatting from real-world omnidirectional images. In: Proceedings of the IEEE/CVF Inter- national Conference on Computer Vision. pp. 28970–28979 (2025) 18 Y. Zhu et al
2025
-
[33]
Univer- sity of Chicago Press (1997)
Snyder, J.P.: Flattening the earth: two thousand years of map projections. Univer- sity of Chicago Press (1997)
1997
-
[34]
Proceedings of the ACM on Computer Graphics and Interactive Techniques8(1), 1–22 (2025)
Tu, X., Radl, L., Steiner, M., Steinberger, M., Kerbl, B., De la Torre, F.: Vrsplat: Fast and robust gaussian splatting for virtual reality. Proceedings of the ACM on Computer Graphics and Interactive Techniques8(1), 1–22 (2025)
2025
-
[35]
Princeton University Press (2012)
Van Brummelen, G.: Heavenly mathematics: The forgotten art of spherical trigonometry. Princeton University Press (2012)
2012
-
[36]
IEEE transactions on image processing 13(4), 600–612 (2004)
Wang, Z., Bovik, A.C., Sheikh, H.R., Simoncelli, E.P.: Image quality assessment: from error visibility to structural similarity. IEEE transactions on image processing 13(4), 600–612 (2004)
2004
-
[37]
In: Proceedings of the Computer Vision and Pattern Recognition Conference
Wu, Q., Esturo, J.M., Mirzaei, A., Moenne-Loccoz, N., Gojcic, Z.: 3dgut: Enabling distorted cameras and secondary rays in gaussian splatting. In: Proceedings of the Computer Vision and Pattern Recognition Conference. pp. 26036–26046 (2025)
2025
-
[38]
In: ECCV (2024)
Yan, Y., Lin, H., Zhou, C., Wang, W., Sun, H., Zhan, K., Lang, X., Zhou, X., Peng, S.: Street gaussians: Modeling dynamic urban scenes with gaussian splatting. In: ECCV (2024)
2024
-
[40]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Zhang, R., Isola, P., Efros, A.A., Shechtman, E., Wang, O.: The unreasonable effectiveness of deep features as a perceptual metric. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 586–595 (2018)
2018
-
[41]
In: IJCAI
Zhao, Q., Zhu, C., Dai, F., Ma, Y., Jin, G., Zhang, Y.: Distortion-aware cnns for spherical images. In: IJCAI. pp. 1198–1204 (2018)
2018
-
[42]
In: Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Zhou, H., Shao, J., Xu, L., Bai, D., Qiu, W., Liu, B., Wang, Y., Geiger, A., Liao, Y.: Hugs: Holistic urban 3d scene understanding via gaussian splatting. In: Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). pp. 21336–21345 (June 2024)
2024
-
[43]
In: Pro- ceedings Visualization, 2001
Zwicker, M., Pfister, H., Van Baar, J., Gross, M.: Ewa volume splatting. In: Pro- ceedings Visualization, 2001. VIS’01. pp. 29–538. IEEE (2001) UniTriSplat 19 UniTriSplat: A Unified 3D Gaussian Splatting Framework with Uniform Spherical Rasterization for Universal Cameras — Supplementary Material — 7 Supplementary Experimental Details This section provide...
2001
-
[44]
Computez-bounds:z min = cos(ϕ c −r s + π 2 ),z max = cos(ϕ c +r s + π 2 )
-
[45]
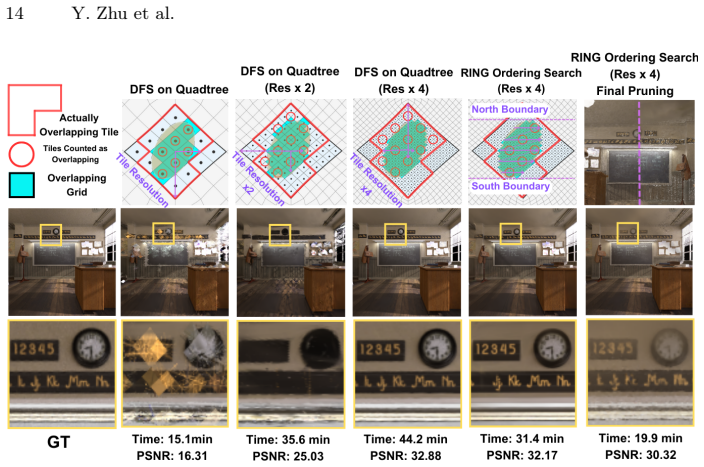
Convert to ring indicesir,min,i r,max using HEALPix ring formulas UniTriSplat 31 Algorithm 2QueryDiscNested: Quadtree Traversal Require:Disc center(ω, ϕ), radiusr s, tile orderk, refinementf Ensure:Overlapping tile indicesT 1:k max ←k+ log 2 f;stack← {(p,0) :p∈[0,11]};T ← ∅ 2:whilestack̸=∅do 3:Pop(p, o);d←Ha versine((ω, ϕ),Pix2Lonla t(p, o)) 4:z←Classify(...
-
[46]
For each ringir, analytically solve for the longitude half-width via Eq. (5)
-
[47]
RING offers approximately1.7×speedup over NESTED with marginal quality loss, as detailed in Sec
Enumerate pixels within the(ωc −∆ω, ω c +∆ω)range on each ring This achievesO(K)time withO(1)memory and better GPU cache coherence due to sequential ring access. RING offers approximately1.7×speedup over NESTED with marginal quality loss, as detailed in Sec. 5.3. 10.3 Training Parameter Scaling The gradient dynamics of our method differ from the pinhole m...
-
[48]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Barron, J.T., Mildenhall, B., Verbin, D., Srinivasan, P.P., Hedman, P.: Mip- nerf 360: Unbounded anti-aliased neural radiance fields. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 5470–5479 (2022) 32 Y. Zhu et al. Algorithm 3QueryDiscRing: RING Sequential Scan Require:Disc center(ω, ϕ), radiusr s, tile orderk E...
2022
-
[49]
In: Scandinavian Conference on Image Analysis
Gunes, U., Turkulainen, M., Ren, X., Solin, A., Kannala, J., Rahtu, E.: Fiord: A fisheye indoor-outdoor dataset with lidar ground truth for 3d scene reconstruc- tion and benchmarking. In: Scandinavian Conference on Image Analysis. pp. 3–17. Springer (2025)
2025
-
[50]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Yeshwanth, C., Liu, Y.C., Nießner, M., Dai, A.: Scannet++: A high-fidelity dataset of 3d indoor scenes. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 12–22 (2023)
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.