FLUIDSPLAT: Reconstructing Physical Fields from Sparse Sensors via Gaussian Primitives
Pith reviewed 2026-05-20 19:32 UTC · model grok-4.3
The pith
A scaffold of anisotropic Gaussian primitives reconstructs continuous flow fields from sparse noisy sensors, with a provable optimal count scaling as (N/σ²)^{d/(2s+d)}.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For an idealized Gaussian primitive estimator the squared risk decomposes into bias of order K^{-2s/d} and variance of order σ² K / N. Balancing these terms produces the optimal primitive count K* ∼ (N/σ²)^{d/(2s+d)}. The model predicts such primitives from sensor readings to form an explicit scaffold and adds a state-conditioned residual decoder to address the remaining variance.
What carries the argument
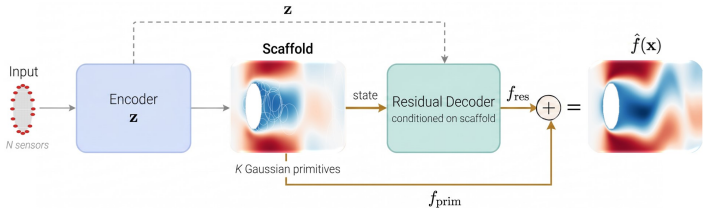
A partition-of-unity scaffold formed by K anisotropic Gaussian primitives that supplies a spatially explicit and interpretable representation of the flow field.
If this is right
- The number of primitives must scale with observation count N and noise variance σ² according to the exponent d/(2s+d) rather than growing without limit.
- A variance bottleneck appears under sparse sensing, so the scaffold is complemented by a state-conditioned residual decoder.
- The method records the lowest mean error on the cylinder-flow benchmark for every surface-sensor layout tested.
- On AirfRANS with eight surface-pressure sensors the error drops 11-23 percent relative to the strongest baseline across three splits.
Where Pith is reading between the lines
- The same scaffold construction could be applied to reconstruct other sparse-measurement fields such as temperature or pressure distributions.
- Positions and shapes of the learned primitives might be inspected to suggest improved sensor placements.
- An adaptive rule that selects K at inference time according to observed noise could tighten performance further.
Load-bearing premise
The underlying flow field must have Sobolev smoothness of order s.
What would settle it
On a synthetic field of known Sobolev smoothness s, vary K while holding N and noise level fixed and check whether squared error decreases proportionally to K^{-2s/d} up to the predicted optimum and then rises.
Figures




read the original abstract
Reconstructing continuous flow fields from sparse surface-mounted sensors is central to aerodynamic design, flow control, and digital-twin instrumentation. Existing neural methods for this task typically encode sensor readings into implicit latent codes with little spatial interpretability and limited formal guidance on how representational capacity should scale with observation count. Inspired by 3D Gaussian Splatting, we introduce FLUIDSPLAT, a sensor-conditioned model that predicts K anisotropic Gaussian primitives forming a partition-of-unity scaffold, a spatially explicit and interpretable intermediate representation of the flow. For an idealized Gaussian primitive estimator, we prove an $O(K^{-s/d})$ approximation rate for fields with Sobolev smoothness $s$; incorporating $N$ noisy observations yields a squared-risk decomposition with bias $O(K^{-2s/d})$ and variance $O(\sigma^{2}K/N)$.Balancing the two yields $K^{*}\!\sim\!(N/\sigma^{2})^{d/(2s+d)}$: primitive count cannot grow freely under sparse sensing, revealing a variance bottleneck that motivates complementing the scaffold with a state-conditioned residual decoder. On a standard cylinder-flow benchmark, FLUIDSPLAT achieves the best mean error across all surface-sensor layouts; on AirfRANS with 8 surface-pressure sensors, it reduces error by 11-23% over the strongest baseline across three standard splits.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces FLUIDSPLAT, a sensor-conditioned neural model that outputs parameters for K anisotropic Gaussian primitives forming a partition-of-unity scaffold to reconstruct continuous physical flow fields from sparse surface sensors. For an idealized Gaussian primitive estimator, it proves an O(K^{-s/d}) approximation rate for Sobolev-smooth fields of order s, derives a squared-risk decomposition (bias O(K^{-2s/d}), variance O(σ²K/N)), and obtains the optimal scaling K* ∼ (N/σ²)^{d/(2s+d)}. The model is evaluated on a cylinder-flow benchmark and AirfRANS, reporting best mean error across sensor layouts and 11-23% error reduction with 8 sensors.
Significance. The attempt to supply formal scaling guidance via bias-variance analysis for sparse sensor reconstruction is a positive step in a domain that has largely relied on empirical neural implicit representations. If the idealized analysis can be shown to inform or bound the actual neural implementation, the derived K* scaling would be a useful contribution for capacity selection under variance bottlenecks. The empirical gains on standard benchmarks add practical interest, though their interpretability is limited by missing statistical details.
major comments (2)
- [Abstract / Theoretical Analysis] Abstract and theoretical analysis paragraph: The O(K^{-s/d}) approximation rate, bias-variance decomposition, and resulting K* scaling are derived exclusively for an idealized Gaussian primitive estimator that exactly realizes the partition-of-unity scaffold. The actual FLUIDSPLAT architecture (sensor-conditioned neural network predicting means, covariances, and amplitudes) receives no quantitative bound on its deviation from this idealized estimator. Consequently the risk decomposition and optimal-K claim do not necessarily transfer to the trained model, which is load-bearing for the paper's central claim of providing formal guidance on representational capacity.
- [Experiments] Experimental section (AirfRANS results): The reported 11-23% error reductions across three standard splits are presented without error bars, variance across runs, or explicit description of the splits and baseline configurations. This omission prevents assessment of whether the gains are statistically reliable or sensitive to the particular data partitioning.
minor comments (2)
- [Abstract] Abstract: missing space in 'O(σ^{2}K/N).Balancing the two yields'.
- [Methods] The manuscript should clarify whether the partition-of-unity constraint is explicitly enforced during optimization or only approximately satisfied by the learned amplitudes.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We respond to each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract / Theoretical Analysis] Abstract and theoretical analysis paragraph: The O(K^{-s/d}) approximation rate, bias-variance decomposition, and resulting K* scaling are derived exclusively for an idealized Gaussian primitive estimator that exactly realizes the partition-of-unity scaffold. The actual FLUIDSPLAT architecture (sensor-conditioned neural network predicting means, covariances, and amplitudes) receives no quantitative bound on its deviation from this idealized estimator. Consequently the risk decomposition and optimal-K claim do not necessarily transfer to the trained model, which is load-bearing for the paper's central claim of providing formal guidance on representational capacity.
Authors: We agree that the approximation rate, bias-variance decomposition, and optimal scaling K* are derived strictly for an idealized estimator that exactly realizes the partition-of-unity scaffold. The FLUIDSPLAT model uses a sensor-conditioned neural network to predict the Gaussian parameters, and we do not supply a quantitative bound on its deviation from this ideal. In the revised manuscript we will update the abstract and theoretical analysis section to explicitly state that the formal results apply to the idealized case and serve as theoretical motivation for capacity selection under noise. We will add a discussion paragraph acknowledging the gap between the idealized analysis and the trained neural implementation. This is a partial revision focused on clarifying scope rather than extending the theory. revision: partial
-
Referee: [Experiments] Experimental section (AirfRANS results): The reported 11-23% error reductions across three standard splits are presented without error bars, variance across runs, or explicit description of the splits and baseline configurations. This omission prevents assessment of whether the gains are statistically reliable or sensitive to the particular data partitioning.
Authors: We agree that the current experimental reporting lacks sufficient statistical detail. In the revised manuscript we will include error bars (standard deviation across multiple independent runs with different random seeds) for the AirfRANS results. We will also expand the experimental section to provide an explicit description of the three standard data splits, including partitioning criteria for sensor layouts and flow conditions, and precise configurations and hyperparameters of all baselines to support reproducibility and statistical assessment. revision: yes
Circularity Check
Theoretical scaling derivation is self-contained analysis
full rationale
The paper states a proof of the O(K^{-s/d}) rate for an idealized Gaussian primitive estimator under Sobolev smoothness s, then derives the bias-variance decomposition and balances terms to obtain the K* scaling. This is a standard first-principles analysis of the estimator class rather than any fitted quantity renamed as prediction, self-definition, or load-bearing self-citation. No equations reduce to their inputs by construction, and the derivation stands independently of the subsequent neural-network implementation details.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Target flow fields possess Sobolev smoothness of order s
invented entities (1)
-
Anisotropic Gaussian primitives forming a partition-of-unity scaffold
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
For an idealized Gaussian primitive estimator, we prove an O(K^{-s/d}) approximation rate for fields with Sobolev smoothness s; ... squared-risk decomposition with bias O(K^{-2s/d}) and variance O(σ²K/N). Balancing the two yields K* ∼ (N/σ²)^{d/(2s+d)}.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Anisotropic Gaussian primitives ... partition-of-unity scaffold
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
ACM Transactions on Graphics , volume =
Bernhard Kerbl and Georgios Kopanas and Thomas Leimkuehler and George Drettakis , title =. ACM Transactions on Graphics , volume =. 2023 , doi =
work page 2023
-
[2]
IEEE Transactions on Visualization and Computer Graphics , volume =
Matthias Zwicker and Hanspeter Pfister and Jeroen van Baar and Markus Gross , title =. IEEE Transactions on Visualization and Computer Graphics , volume =. 2002 , doi =
work page 2002
-
[3]
Communications of the ACM , volume=
Nerf: Representing scenes as neural radiance fields for view synthesis , author=. Communications of the ACM , volume=. 2021 , publisher=
work page 2021
-
[4]
ACM SIGGRAPH 2024 conference papers , pages=
2d gaussian splatting for geometrically accurate radiance fields , author=. ACM SIGGRAPH 2024 conference papers , pages=
work page 2024
-
[5]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Mip-splatting: Alias-free 3d gaussian splatting , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[6]
Chen, Guikun and Wang, Wenguan , title =. ACM Comput. Surv. , month = apr, keywords =. 2026 , publisher =. doi:10.1145/3807511 , note =
-
[7]
Nature Machine Intelligence , volume=
Development of the senseiver for efficient field reconstruction from sparse observations , author=. Nature Machine Intelligence , volume=. 2023 , publisher=
work page 2023
-
[8]
Nature Machine Intelligence , volume=
Global field reconstruction from sparse sensors with Voronoi tessellation-assisted deep learning , author=. Nature Machine Intelligence , volume=. 2021 , publisher=
work page 2021
-
[9]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
Shallow neural networks for fluid flow reconstruction with limited sensors , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2020 , publisher=
work page 2020
-
[10]
Assessment of supervised machine learning methods for fluid flows: K. Fukami et al. , author=. Theoretical and Computational Fluid Dynamics , volume=. 2020 , publisher=
work page 2020
-
[11]
Physical Review Fluids , volume=
Robust flow reconstruction from limited measurements via sparse representation , author=. Physical Review Fluids , volume=. 2019 , publisher=
work page 2019
-
[12]
IEEE Control Systems Magazine , volume=
Data-driven sparse sensor placement for reconstruction: Demonstrating the benefits of exploiting known patterns , author=. IEEE Control Systems Magazine , volume=. 2018 , publisher=
work page 2018
-
[13]
Nature machine intelligence , volume=
Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators , author=. Nature machine intelligence , volume=. 2021 , publisher=
work page 2021
-
[14]
International Conference on Learning Representations , year=
Fourier Neural Operator for Parametric Partial Differential Equations , author=. International Conference on Learning Representations , year=
-
[15]
Nature Reviews Physics , volume =
Kamyar Azizzadenesheli and Nikola Kovachki and Zongyi Li and Miguel Liu-Schiaffini and Jean Kossaifi and Anima Anandkumar , title =. Nature Reviews Physics , volume =. 2024 , doi =
work page 2024
-
[16]
International Journal of Thermal Sciences , volume=
RecFNO: A resolution-invariant flow and heat field reconstruction method from sparse observations via Fourier neural operator , author=. International Journal of Thermal Sciences , volume=. 2024 , publisher=
work page 2024
-
[17]
Deep learning with fourier features for regressive flow field reconstruction from sparse sensor measurements , author=. Scientific Reports , year=
-
[18]
Journal of Machine Learning Research , volume=
Fourier neural operator with learned deformations for pdes on general geometries , author=. Journal of Machine Learning Research , volume=
-
[19]
Advances in Neural Information Processing Systems , volume=
Geometry-informed neural operator for large-scale 3d pdes , author=. Advances in Neural Information Processing Systems , volume=
-
[20]
International conference on machine learning , pages=
Gnot: A general neural operator transformer for operator learning , author=. International conference on machine learning , pages=. 2023 , organization=
work page 2023
-
[21]
International Conference on Machine Learning , pages=
Transolver: A Fast Transformer Solver for PDEs on General Geometries , author=. International Conference on Machine Learning , pages=. 2024 , organization=
work page 2024
-
[22]
arXiv preprint arXiv:2505.18190 , year=
PhySense: Sensor Placement Optimization for Accurate Physics Sensing , author=. arXiv preprint arXiv:2505.18190 , year=
-
[23]
Nature Machine Intelligence , volume=
Enhancing deep learning-based field reconstruction with a differentiable learning framework , author=. Nature Machine Intelligence , volume=. 2025 , publisher=
work page 2025
-
[24]
Advances in Neural Information Processing Systems , volume=
Airfrans: High fidelity computational fluid dynamics dataset for approximating reynolds-averaged navier--stokes solutions , author=. Advances in Neural Information Processing Systems , volume=
- [25]
-
[26]
Kernel techniques: from machine learning to meshless methods , author=. Acta numerica , volume=. 2006 , publisher=
work page 2006
-
[27]
Mathematics of Computation , volume=
Sobolev bounds on functions with scattered zeros, with applications to radial basis function surface fitting , author=. Mathematics of Computation , volume=
-
[28]
Advances in Computational Mathematics , volume=
Error estimates and condition numbers for radial basis function interpolation , author=. Advances in Computational Mathematics , volume=. 1995 , publisher=
work page 1995
-
[29]
Radial basis functions , author=. Acta numerica , volume=. 2000 , publisher=
work page 2000
-
[30]
Mathematics of Computation , volume=
Rate of convergence of Shepard’s global interpolation formula , author=. Mathematics of Computation , volume=
-
[31]
Proceedings of the 1968 23rd ACM national conference , pages=
A two-dimensional interpolation function for irregularly-spaced data , author=. Proceedings of the 1968 23rd ACM national conference , pages=
work page 1968
-
[32]
Journal of Approximation Theory , volume=
Bounds on multivariate polynomials and exponential error estimates for multiquadric interpolation , author=. Journal of Approximation Theory , volume=. 1992 , publisher=
work page 1992
-
[33]
International journal for numerical methods in engineering , volume=
The partition of unity method , author=. International journal for numerical methods in engineering , volume=. 1997 , publisher=
work page 1997
-
[34]
SIAM Journal on Numerical Analysis , volume=
Estimation of linear functionals on Sobolev spaces with application to Fourier transforms and spline interpolation , author=. SIAM Journal on Numerical Analysis , volume=. 1970 , publisher=
work page 1970
-
[35]
Universal approximation using radial-basis-function networks , author=. Neural computation , volume=. 1991 , publisher=
work page 1991
-
[36]
Neural networks for optimal approximation of smooth and analytic functions , author=. Neural computation , volume=. 1996 , publisher=
work page 1996
-
[37]
On the relationship between generalization error, hypothesis complexity, and sample complexity for radial basis functions , author=. Neural Computation , volume=. 1996 , publisher=
work page 1996
-
[38]
Transactions of the American Mathematical Society , volume=
Approximation using scattered shifts of a multivariate function , author=. Transactions of the American Mathematical Society , volume=
-
[39]
IEEE Transactions on Information theory , volume=
Universal approximation bounds for superpositions of a sigmoidal function , author=. IEEE Transactions on Information theory , volume=. 2002 , publisher=
work page 2002
-
[40]
Mathematics of control, signals and systems , volume=
Approximation by superpositions of a sigmoidal function , author=. Mathematics of control, signals and systems , volume=. 1989 , publisher=
work page 1989
-
[41]
Multilayer feedforward networks are universal approximators , author=. Neural networks , volume=. 1989 , publisher=
work page 1989
-
[42]
Error bounds for approximations with deep ReLU networks , author=. Neural networks , volume=. 2017 , publisher=
work page 2017
-
[43]
Advances in neural information processing systems , volume=
Fourier features let networks learn high frequency functions in low dimensional domains , author=. Advances in neural information processing systems , volume=
-
[44]
Advances in neural information processing systems , volume=
Implicit neural representations with periodic activation functions , author=. Advances in neural information processing systems , volume=
-
[45]
International conference on machine learning , pages=
On the spectral bias of neural networks , author=. International conference on machine learning , pages=. 2019 , organization=
work page 2019
-
[46]
The annals of statistics , pages=
Optimal global rates of convergence for nonparametric regression , author=. The annals of statistics , pages=. 1982 , publisher=
work page 1982
-
[47]
Statistical estimation: asymptotic theory , author=. 2013 , publisher=
work page 2013
- [48]
-
[49]
A distribution-free theory of nonparametric regression , author=. 2002 , publisher=
work page 2002
-
[50]
Festschrift for Lucien Le Cam: Research papers in probability and statistics , pages=
From model selection to adaptive estimation , author=. Festschrift for Lucien Le Cam: Research papers in probability and statistics , pages=. 1997 , publisher=
work page 1997
-
[51]
Navier--Stokes equations: theory and numerical analysis , author=. 2024 , publisher=
work page 2024
-
[52]
NASA STI/Recon Technical Report A , volume=
Finite element methods for Navier-Stokes equations: theory and algorithms , author=. NASA STI/Recon Technical Report A , volume=
-
[53]
Elliptic problems in nonsmooth domains , author=. 2011 , publisher=
work page 2011
-
[54]
Mathematical Surveys and Monographs , year=
Spectral Problems Associated with Corner Singularities of Solutions to Elliptic Equations , author=. Mathematical Surveys and Monographs , year=
-
[55]
Proceedings of the ACM on Computer Graphics and Interactive Techniques , volume=
Neural upflow: A scene flow learning approach to increase the apparent resolution of particle-based liquids , author=. Proceedings of the ACM on Computer Graphics and Interactive Techniques , volume=. 2021 , publisher=
work page 2021
-
[56]
Computer Graphics Forum , volume=
Liquid splash modeling with neural networks , author=. Computer Graphics Forum , volume=. 2018 , organization=
work page 2018
-
[57]
International conference on machine learning , pages=
Learning to simulate complex physics with graph networks , author=. International conference on machine learning , pages=. 2020 , organization=
work page 2020
-
[58]
International conference on learning representations , year=
Lagrangian fluid simulation with continuous convolutions , author=. International conference on learning representations , year=
-
[59]
Advances in Neural Information Processing Systems , volume=
Guaranteed conservation of momentum for learning particle-based fluid dynamics , author=. Advances in Neural Information Processing Systems , volume=
-
[60]
Proceedings of the 41st International Conference on Machine Learning , pages=
Neural SPH: improved neural modeling of Lagrangian fluid dynamics , author=. Proceedings of the 41st International Conference on Machine Learning , pages=
-
[61]
Advances in Neural Information Processing Systems , volume=
Lagrangebench: A lagrangian fluid mechanics benchmarking suite , author=. Advances in Neural Information Processing Systems , volume=
-
[62]
Journal of Functional Analysis , volume=
Nonlinear approximation using Gaussian kernels , author=. Journal of Functional Analysis , volume=. 2010 , publisher=
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.