Diffusion-based 4D Trajectory Prediction and Distributed Control for UAV Swarms
Pith reviewed 2026-07-01 05:31 UTC · model grok-4.3
The pith
A diffusion model that refines axis-wise forecasts supplies the uncertainty estimates needed for real-time distributed nonlinear model predictive control of UAV swarms.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
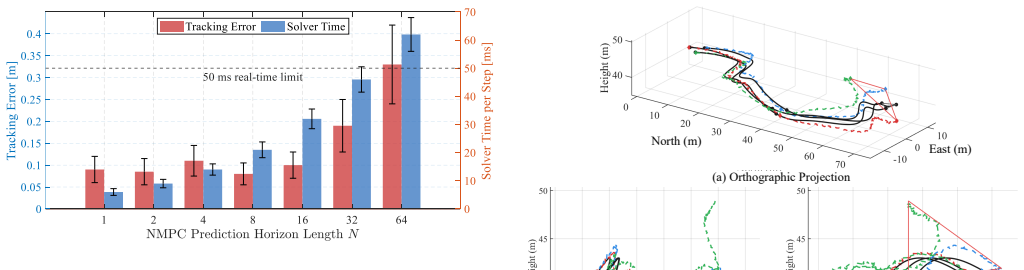
The authors claim that a dimension-decoupled coarse-to-fine forecaster combined with a diffusion-based residual dynamics refinement module, when inserted into an uncertainty-aware distributed nonlinear model predictive control loop, produces formation-stable trajectories whose average tracking error falls below 0.07 meters at 34 frames per second in urban and industrial settings.
What carries the argument
The diffusion-based residual dynamics refinement module, which models the remaining temporally correlated uncertainties after an initial axis-wise forecast and supplies those corrections to the distributed controller.
If this is right
- Trajectory tracking error drops by 10-15 percent relative to prior methods while preserving sub-30 ms latency.
- Formation stability holds across six distinct airspace scenarios using the released synchronized three-UAV dataset.
- Real-time inference at 34 FPS remains feasible for agile flight in complex environments.
- The same prediction-control loop can be applied to other multi-vehicle tasks that require handling dynamic uncertainties.
Where Pith is reading between the lines
- The axis-wise decoupling step may reduce the cost of extending the method to larger swarms without a proportional rise in computation.
- If the released dataset is used for training other predictors, the diffusion refinement step could be tested as a plug-in module for existing forecasters.
- The approach implicitly assumes that the dominant uncertainties are temporally correlated rather than spatially correlated across vehicles; relaxing that assumption would require a different refinement architecture.
Load-bearing premise
The diffusion-based residual dynamics refinement module must meaningfully reduce prediction error beyond the coarse-to-fine forecasting step alone.
What would settle it
Ablating the diffusion refinement module and measuring whether average tracking error rises above 0.07 m or the reported 10-15 percent improvement disappears on the same test sequences.
Figures
read the original abstract
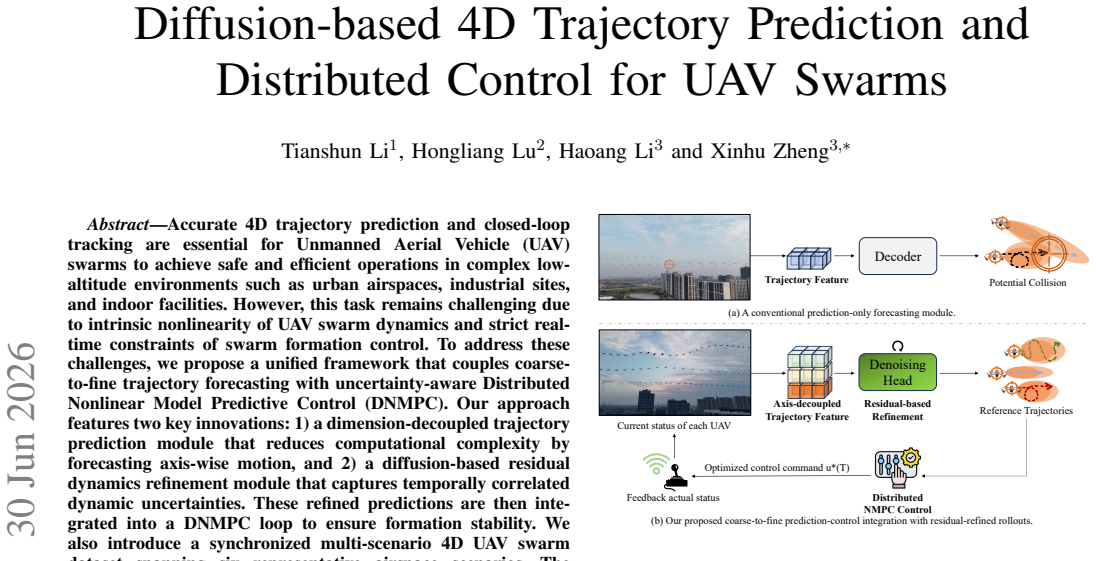
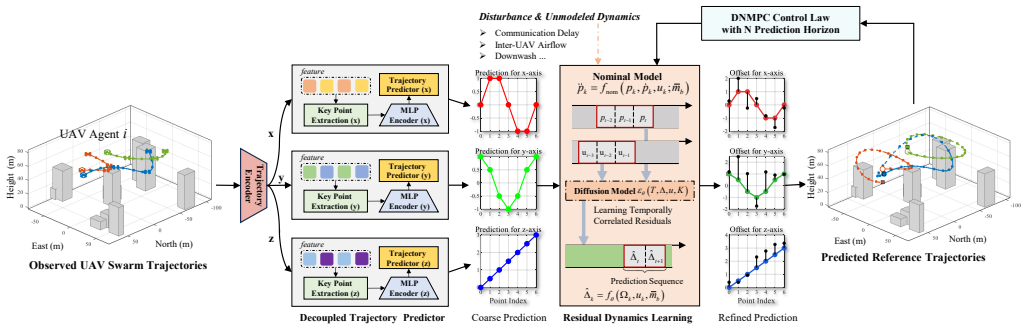
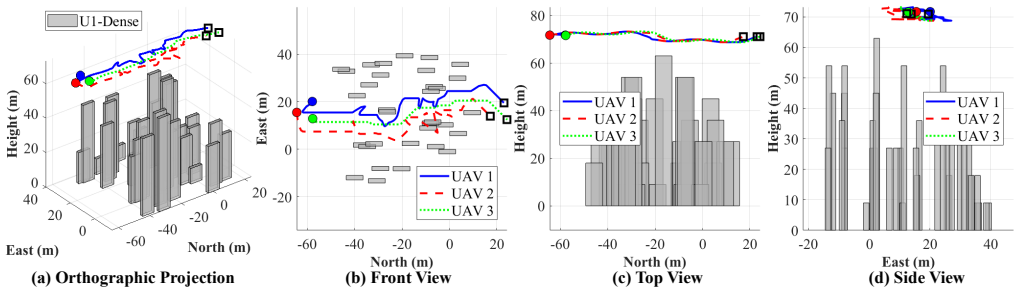
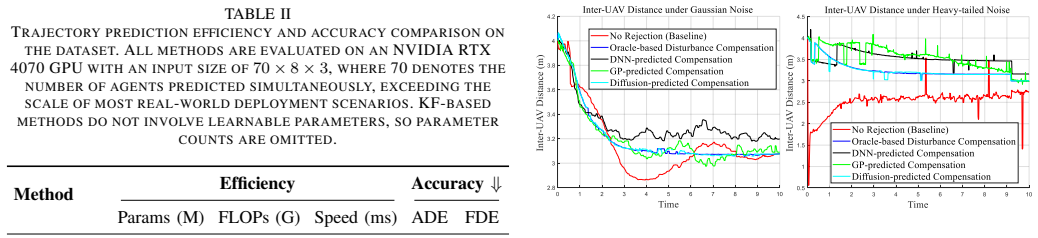
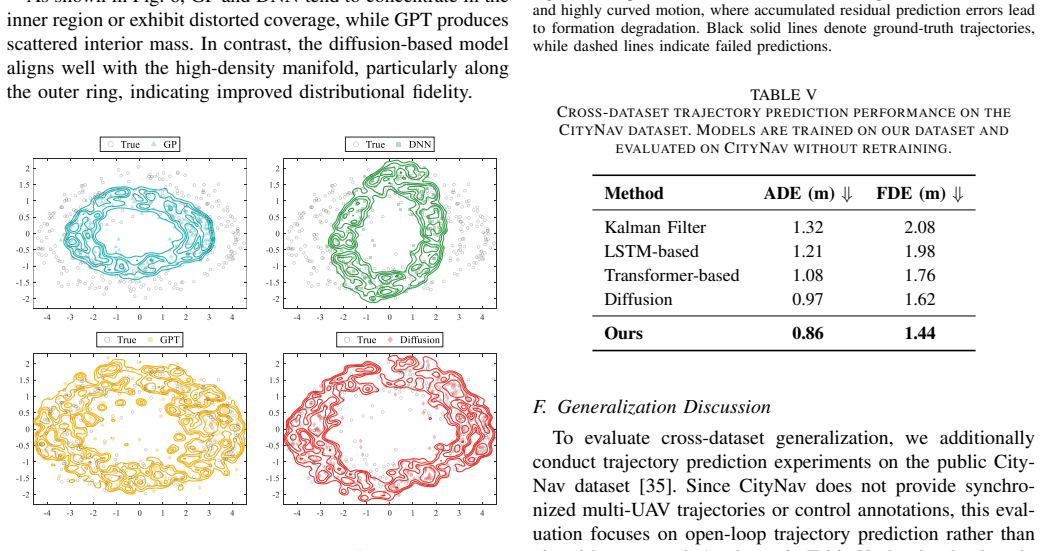
Accurate 4D trajectory prediction and closed-loop tracking are essential for Unmanned Aerial Vehicle (UAV) swarms to achieve safe and efficient operations in complex low-altitude environments such as urban airspaces, industrial sites, and indoor facilities. However, this task remains challenging due to intrinsic nonlinearity of UAV swarm dynamics and strict real-time constraints of swarm formation control. To address these challenges, we propose a unified framework that couples coarse-to-fine trajectory forecasting with uncertainty-aware Distributed Nonlinear Model Predictive Control (DNMPC). Our approach features two key innovations: 1) a dimension-decoupled trajectory prediction module that reduces computational complexity by forecasting axis-wise motion, and 2) a diffusion-based residual dynamics refinement module that captures temporally correlated dynamic uncertainties. These refined predictions are then integrated into a DNMPC loop to ensure formation stability. We also introduce a synchronized multi-scenario 4D UAV swarm dataset spanning six representative airspace scenarios. The dataset contains over \textbf{7,900} frames of synchronized three-UAV trajectories with frame-level annotations of speed intention and target sector. Extensive experiments demonstrate that our approach outperforms state-of-the-art baselines, reducing trajectory tracking error by up to \textbf{10-15\%} and achieving sub-\textbf{0.07\,m} average tracking error in complex urban and industrial environments, while maintaining real-time inference speeds of 34 FPS (sub-30 ms latency) suitable for agile flight.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a unified framework for 4D trajectory prediction and distributed control of UAV swarms. It combines a dimension-decoupled coarse-to-fine forecasting module with a diffusion-based residual dynamics refinement module, which is integrated into a Distributed Nonlinear Model Predictive Control (DNMPC) scheme. A new dataset of over 7,900 frames across six scenarios is introduced, and the approach is claimed to achieve up to 10-15% reduction in trajectory tracking error, sub-0.07 m average error, and real-time performance at 34 FPS.
Significance. If the empirical claims are substantiated, this work could offer a practical advancement in real-time UAV swarm coordination under uncertainty, with potential applications in urban airspaces and industrial settings. The provision of a new multi-scenario dataset represents a useful contribution to the community for benchmarking.
major comments (1)
- [Abstract] Abstract: The abstract presents the diffusion-based residual dynamics refinement module as one of the two key innovations that 'captures temporally correlated dynamic uncertainties,' yet supplies no ablation study, error delta, or statistical test demonstrating its isolated contribution to the reported 10-15% tracking error reduction or sub-0.07 m performance. Without this, it remains possible that the dimension-decoupled forecaster alone drives the gains, rendering the diffusion module non-load-bearing for the DNMPC integration claim.
minor comments (2)
- The abstract references 'state-of-the-art baselines' and 'extensive experiments' but omits any description of the baselines, validation protocol, error-bar details, or dataset access information, which prevents verification of the performance numbers.
- The dataset is described as containing 'over 7,900 frames of synchronized three-UAV trajectories' with 'frame-level annotations of speed intention and target sector'; providing the exact frame count, per-scenario breakdown, and annotation format would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract presents the diffusion-based residual dynamics refinement module as one of the two key innovations that 'captures temporally correlated dynamic uncertainties,' yet supplies no ablation study, error delta, or statistical test demonstrating its isolated contribution to the reported 10-15% tracking error reduction or sub-0.07 m performance. Without this, it remains possible that the dimension-decoupled forecaster alone drives the gains, rendering the diffusion module non-load-bearing for the DNMPC integration claim.
Authors: We agree that an explicit ablation isolating the contribution of the diffusion-based residual dynamics refinement module is necessary to substantiate its role in the reported performance improvements and to support the DNMPC integration claim. The manuscript currently demonstrates overall gains relative to baselines but does not include a dedicated ablation with error deltas and statistical tests for this module alone. We will add such an ablation study (including quantitative deltas and significance testing) to the experiments section and revise the abstract to reference these results, ensuring the claims are properly evidenced. revision: yes
Circularity Check
Empirical pipeline with no self-referential derivations or fitted predictions
full rationale
The paper presents a modular framework combining a dimension-decoupled forecaster, diffusion-based residual refinement, and DNMPC integration, validated through experiments on a new dataset. No equations, fitted parameters, or self-citations are shown that reduce any claimed prediction or performance metric to its own inputs by construction. The reported error reductions (10-15%, sub-0.07 m) are positioned as empirical outcomes rather than algebraic identities or renamed fits, making the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Aeroduo: Aerial duo for uav-based vision and language navigation,
R. Wu, Y . Zhang, J. Chen, L. Huang, S. Zhang, X. Zhou, L. Wang, and S. Liu, “Aeroduo: Aerial duo for uav-based vision and language navigation,” inProceedings of the 33rd ACM International Conference on Multimedia, ser. MM ’25. New York, NY , USA: Association for Computing Machinery, 2025, p. 2576–2585. [Online]. Available: https://doi.org/10.1145/3746027.3754498
-
[2]
Cooperative task allocation with si- multaneous arrival and resource constraint for multi-uav using a genetic algorithm,
F. Yan, J. Chu, J. Hu, and X. Zhu, “Cooperative task allocation with si- multaneous arrival and resource constraint for multi-uav using a genetic algorithm,”Expert Syst. Appl., vol. 245, p. 123023, 2023. [Online]. Available: https://api.semanticscholar.org/CorpusID:266666228
2023
-
[3]
Adaptive conflict resolution for multi- uav 4d routes optimization using stochastic fractal search algorithm,
B. Pang, K. H. Low, and C. Lv, “Adaptive conflict resolution for multi- uav 4d routes optimization using stochastic fractal search algorithm,” Transportation Research Part C: Emerging Technologies, vol. 139, p. 103666, 2022
2022
-
[4]
Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data,
T. Salzmann, B. Ivanovic, P. Chakravarty, and M. Pavone, “Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data,” in Proceedings of the European Conference on Computer Vision (ECCV), 2020
2020
-
[5]
Agentformer: Agent-aware transformers for socio-temporal multi-agent forecasting,
Y . Yuan, X. Weng, Y . Ou, and K. M. Kitani, “Agentformer: Agent-aware transformers for socio-temporal multi-agent forecasting,” inProceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 9813–9823
2021
-
[6]
Chauffeurnet: Learning to drive by imitating the best and synthesizing the worst,
M. Bansal, A. Krizhevsky, and A. Ogale, “Chauffeurnet: Learning to drive by imitating the best and synthesizing the worst,”Robotics: Science and Systems (RSS), 2019
2019
-
[7]
Unified multi-agent trajectory modeling with masked trajectory diffusion,
S. Yang, Z. Shi, and Z. Zou, “Unified multi-agent trajectory modeling with masked trajectory diffusion,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 27 563–27 574
2025
-
[8]
Heterogeneous-agent trajectory forecasting incorporating class uncertainty,
B. Ivanovic, K.-H. Lee, P. Tokmakov, B. Wulfe, R. T. McAllister, A. Gaidon, and M. Pavone, “Heterogeneous-agent trajectory forecasting incorporating class uncertainty,”2022 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), pp. 12 196–12 203, 2021
2022
-
[9]
Vnagt: Variational non-autoregressive graph transformer network for multi-agent trajectory prediction,
X. Chen, H. Zhang, Y . Hu, J. Liang, and H. Wang, “Vnagt: Variational non-autoregressive graph transformer network for multi-agent trajectory prediction,”IEEE Transactions on Vehicular Technology, vol. 72, no. 10, pp. 12 540–12 552, 2023
2023
-
[10]
Denoising Diffusion Probabilistic Models
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,”ArXiv, vol. abs/2006.11239, 2020. [Online]. Available: https://api.semanticscholar.org/CorpusID:219955663
work page internal anchor Pith review Pith/arXiv arXiv 2006
-
[11]
Swarmdiff: Swarm robotic trajectory planning in cluttered environments via diffusion transformer,
K. Ding, C. Jiao, Y . Hu, K. Zhou, P. Wu, Y . Mu, and C. Liu, “Swarmdiff: Swarm robotic trajectory planning in cluttered environments via diffusion transformer,”2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pp. 4164–4173, 2025. [Online]. Available: https://api.semanticscholar.org/CorpusID:278783000
2025
-
[12]
Motiondiffuser: Controllable multi-agent motion prediction using diffusion,
C. Jiang, A. Cornman, C. Park, B. Sapp, Y . Zhou, D. Anguelov et al., “Motiondiffuser: Controllable multi-agent motion prediction using diffusion,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 9644–9653
2023
-
[13]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, vol. 44, pp. 1684 – 1704, 2023. [Online]. Available: https://api.semanticscholar.org/CorpusID:257378658
2023
-
[14]
Planning with diffu- sion for flexible behavior synthesis,
M. Janner, Y . Du, J. B. Tenenbaum, and S. Levine, “Planning with diffu- sion for flexible behavior synthesis,” inProceedings of the International Conference on Machine Learning (ICML), 2022
2022
-
[15]
Edmp: Ensemble-of-costs-guided diffu- sion for motion planning,
K. Saha, V . Mandadi, J. Reddy, A. Srikanth, A. Agarwal, B. Sen, A. Singh, and M. Krishna, “Edmp: Ensemble-of-costs-guided diffu- sion for motion planning,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 10 351–10 358
2024
-
[16]
Navidiffusor: Cost-guided diffusion model for visual navigation,
Y . Zeng, H. Ren, S. Wang, J. Huang, and H. Cheng, “Navidiffusor: Cost-guided diffusion model for visual navigation,” 2025. [Online]. Available: https://arxiv.org/abs/2504.10003
-
[17]
Motiondiffuse: Text-driven human motion generation with diffusion model,
M. Zhang, Z. Cai, L. Pan, F. Hong, X. Guo, L. Yang, and Z. Liu, “Motiondiffuse: Text-driven human motion generation with diffusion model,”IEEE Transactions on Pattern Analysis and Machine Intelli- gence, vol. 46, pp. 4115–4128, 2022
2022
-
[18]
Guided motion diffusion for controllable human motion synthesis,
K. Karunratanakul, K. Preechakul, S. Suwajanakorn, and S. Tang, “Guided motion diffusion for controllable human motion synthesis,” in 2023 IEEE/CVF International Conference on Computer Vision (ICCV), 2023, pp. 2151–2162
2023
-
[19]
Hierarchical diffusion policy: Manipulation trajectory generation via contact guidance,
D. Wang, C. Liu, F. Chang, and Y . Xu, “Hierarchical diffusion policy: Manipulation trajectory generation via contact guidance,”IEEE Trans- actions on Robotics, vol. 41, pp. 2086–2104, 2025
2086
-
[20]
Trajectory prediction with latent belief energy-based model,
B. Pang, T. Zhao, X. Xie, and Y . N. Wu, “Trajectory prediction with latent belief energy-based model,”2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 11 809–11 819, 2021. [Online]. Available: https://api.semanticscholar.org/CorpusID:233168683
2021
-
[21]
Group normalization,
Y . Wu and K. He, “Group normalization,”International Journal of Computer Vision, vol. 128, pp. 742 – 755, 2018. [Online]. Available: https://api.semanticscholar.org/CorpusID:4076251
2018
-
[22]
Mish: A self regularized non-monotonic activation function,
D. Misra, “Mish: A self regularized non-monotonic activation function,” Proceedings of the British Machine Vision Conference 2020, 2020. [On- line]. Available: https://api.semanticscholar.org/CorpusID:221113156
2020
-
[23]
Decen- tralized real-time iterations for distributed nonlinear model predictive control,
G. Stomberg, A. Engelmann, M. Diehl, and T. Faulwasser, “Decen- tralized real-time iterations for distributed nonlinear model predictive control,”arXiv preprint arXiv:2401.14898, 2024
-
[24]
Data-driven mpc for quadrotors,
G. Torrente, E. Kaufmann, P. F ¨ohn, and D. Scaramuzza, “Data-driven mpc for quadrotors,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3769–3776, 2021
2021
-
[25]
Neural lander: Stable drone landing control using learned dynamics,
G. Shi, X. Shi, M. O’Connell, R. Yu, K. Azizzadenesheli, A. Anand- kumar, Y . Yue, and S.-J. Chung, “Neural lander: Stable drone landing control using learned dynamics,” in2019 international conference on robotics and automation (icra). IEEE, 2019, pp. 9784–9790
2019
-
[26]
Indooruav: Benchmarking vision-language uav navigation in continuous indoor environments,
X. Liu, Y . Liu, H. Qiu, Q. Yang, and Z. Lian, “Indooruav: Benchmarking vision-language uav navigation in continuous indoor environments,” in Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), vol. 40, 2026
2026
-
[27]
The unscented kalman filter for non- linear estimation,
E. Wan and R. Van Der Merwe, “The unscented kalman filter for non- linear estimation,” inProceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), 2000, pp. 153–158
2000
-
[28]
An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling
S. Bai, J. Z. Kolter, and V . Koltun, “An empirical evaluation of generic convolutional and recurrent networks for sequence modeling,” arXiv:1803.01271, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[29]
Multi- stream representation learning for pedestrian trajectory prediction,
Y . Wu, L. Wang, S. Zhou, J. Duan, G. Hua, and W. Tang, “Multi- stream representation learning for pedestrian trajectory prediction,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 37, 2023, pp. 2875–2882
2023
-
[30]
Non-probability sampling network for stochastic human trajectory prediction,
I. Bae, J.-H. Park, and H.-G. Jeon, “Non-probability sampling network for stochastic human trajectory prediction,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022
2022
-
[31]
Social-bigat: multimodal trajectory forecasting using bicycle-gan and graph attention networks,
V . Kosaraju, A. Sadeghian, R. Mart´ın-Mart´ın, I. Reid, S. H. Rezatofighi, and S. Savarese, “Social-bigat: multimodal trajectory forecasting using bicycle-gan and graph attention networks,”Proceedings of the 33rd International Conference on Neural Information Processing Systems, 2019
2019
-
[32]
Dynamic attention- based cvae-gan for pedestrian trajectory prediction,
Z. Zhou, G. Huang, Z. Su, Y . Li, and W. Hua, “Dynamic attention- based cvae-gan for pedestrian trajectory prediction,”IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 704–711, 2022
2022
-
[33]
Motion transformer with global intention localization and local movement refinement,
S. Shi, L. Jiang, D. Dai, and B. Schiele, “Motion transformer with global intention localization and local movement refinement,”Advances in Neural Information Processing Systems, 2022
2022
-
[34]
Denoising Diffusion Implicit Models
J. Song, C. Meng, and S. Ermon, “Denoising diffusion implicit models,”ArXiv, vol. abs/2010.02502, 2020. [Online]. Available: https://api.semanticscholar.org/CorpusID:222140788
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[35]
Citynav: A large-scale dataset for real-world aerial navigation,
J. Lee, T. Miyanishi, S. Kurita, K. Sakamoto, D. Azuma, Y . Matsuo, and N. Inoue, “Citynav: A large-scale dataset for real-world aerial navigation,” 2025. [Online]. Available: https://arxiv.org/abs/2406.14240
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.