Scaling Observation-aware Planning in Uncertain Domains
Pith reviewed 2026-05-22 05:01 UTC · model grok-4.3
The pith
Decomposing POMDPs lets solvers handle far larger sensor selection and observability problems in uncertain planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
This work studies (sub-)symbolic techniques to scale solving of decidable fragments of the OOP, namely the Sensor Selection Problem (SSP) and the Positional Observability Problem (POP). Besides improving the original approach based on parameter synthesis, the authors develop a new solving method that identifies sensible observation functions via decomposition of POMDPs, improving performance by 3 and 5 orders of magnitude for instance size and runtime, respectively.
What carries the argument
Decomposition of a POMDP that extracts sensible observation functions while preserving decidability for the SSP and POP fragments of the Optimal Observability Problem.
If this is right
- Instances up to three orders of magnitude larger become solvable.
- Runtime drops by five orders of magnitude compared with prior parameter synthesis.
- Engineers can now explore more sensing configurations while respecting hardware and processing costs.
- The same decomposition approach can be applied to both the sensor-selection and positional-observability fragments.
- The method stays inside the decidable fragments, so it inherits their formal guarantees.
Where Pith is reading between the lines
- Similar decomposition ideas might transfer to other POMDP planning problems that involve choosing what to observe.
- The scaled solver could be embedded inside a larger automated design loop for robotic platforms with tight sensor budgets.
- Empirical tests on navigation or manipulation benchmarks with real sensor noise would show whether the speed-up survives outside synthetic instances.
- If the quality preservation holds only approximately, hybrid exact-plus-decomposition pipelines could still be useful.
Load-bearing premise
The decomposition step preserves both decidability and the exact solution quality of the original Sensor Selection and Positional Observability problems.
What would settle it
Running the new decomposition method on a small, previously solved SSP or POP instance and obtaining a different observation function or a strictly worse task-achievement guarantee than the exact parameter-synthesis baseline.
Figures












read the original abstract
Deciding which sensing capabilities to deploy on an agent in uncertain domains is a fundamental engineering challenge, in which one balances task achievability against the high costs of hardware and processing. This problem has previously been formalized as the Optimal Observability Problem (OOP), based on the well-known Partially Observable Markov Decision Process (POMDP) model for decision-making. This work studies (sub-)symbolic techniques to scale solving of decidable fragments of the OOP, namely the Sensor Selection Problem (SSP) and the Positional Observability Problem (POP). Besides improving the original approach based on parameter synthesis, we develop a new solving method that identifies sensible observation functions via decomposition of POMDPs, improving performance by 3 and 5 orders of magnitude for instance size and runtime, respectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a decomposition-based solving method for identifying sensible observation functions in decidable fragments of the Optimal Observability Problem (OOP) for POMDPs, specifically the Sensor Selection Problem (SSP) and Positional Observability Problem (POP). It reports that this approach improves upon prior parameter-synthesis techniques by three orders of magnitude in solvable instance size and five orders of magnitude in runtime.
Significance. If the decomposition is shown to preserve solution quality and feasibility status for the SSP and POP fragments, the result would enable substantially larger observation-aware planning instances in uncertain domains and constitute a meaningful engineering advance.
major comments (1)
- [Decomposition method (method section)] The manuscript describes the POMDP decomposition for SSP and POP but supplies no theorem, lemma, or formal argument establishing that the observation functions returned by the decomposed subproblems are equivalent (sound and complete) to those of the original OOP formulation on the same input. This equivalence is load-bearing for the central performance claim, because without it the reported speed-ups could be achieved by solving a strictly weaker decision problem.
minor comments (1)
- [Abstract] The abstract states that the new method 'improves the original approach based on parameter synthesis' without citing the specific prior work or section that defines that baseline.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for identifying this important gap in the presentation of the decomposition method. We address the major comment below.
read point-by-point responses
-
Referee: The manuscript describes the POMDP decomposition for SSP and POP but supplies no theorem, lemma, or formal argument establishing that the observation functions returned by the decomposed subproblems are equivalent (sound and complete) to those of the original OOP formulation on the same input. This equivalence is load-bearing for the central performance claim, because without it the reported speed-ups could be achieved by solving a strictly weaker decision problem.
Authors: We agree with the referee that an explicit formal argument is required to establish that the decomposed subproblems for SSP and POP return observation functions that are sound and complete with respect to the original OOP formulation. The current manuscript describes the decomposition procedure and reports empirical speed-ups but does not include a dedicated theorem or proof of equivalence. In the revised version we will insert a new subsection in the method section containing (i) a formal statement of the equivalence theorem for both SSP and POP and (ii) a proof sketch showing that any observation function returned by the decomposed procedure satisfies the original constraints and that every feasible solution of the original problem is recovered by the decomposition. This addition will directly address the concern that the reported performance gains might apply only to a weaker problem. revision: yes
Circularity Check
No significant circularity detected; derivation is self-contained
full rationale
The paper claims a new decomposition-based solving method for SSP and POP fragments of the OOP in POMDPs, with reported performance gains over parameter synthesis. The abstract and context provide no equations, self-definitions, or self-citations that reduce the central result (decomposition identifying sensible observation functions) to its inputs by construction. No fitted parameters are renamed as predictions, and no uniqueness theorems or ansatzes are smuggled via self-citation. The equivalence of the decomposition to the original problem is presented as a methodological assumption rather than a tautological redefinition. This is the expected non-finding for a paper whose core contribution is an algorithmic technique without self-referential reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption POMDP model for decision-making under uncertainty
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
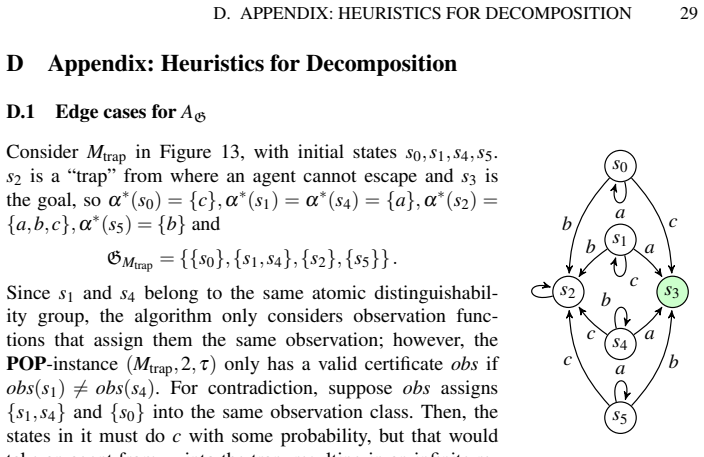
develop a new solving method that identifies sensible observation functions via decomposition of POMDPs... atomic distinguishability groups... strong/weak action equivalence... AG algorithm over S(n,k) partitions
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
typed parametric Markov chains... feasibility problem for tpMCs... ETR-complete
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
- [2]
-
[3]
Andriushchenko, R., ˇCeˇska, M., Junges, S., Katoen, J.P., Stupinsk ´y, ˇS.: Paynt: A tool for inductive synthesis of probabilistic programs. In: Silva, A., Leino, K.R.M. (eds.) Computer Aided Verification. pp. 856–869. Springer International Publishing, Cham (2021)
work page 2021
-
[4]
Baier, C., Katoen, J.P.: Principles of model checking. MIT press (2008)
work page 2008
-
[5]
CoRRabs/2201.08772(2022), https://arxiv.org/abs/2201.08772
Bork, A., Katoen, J., Quatmann, T.: Under-approximating expected total rewards in pomdps. CoRRabs/2201.08772(2022), https://arxiv.org/abs/2201.08772
- [6]
-
[7]
In: Proceedings of the International Conference on Automated Planning and Scheduling
Chatterjee, K., Chmelik, M., Topcu, U.: Sensor synthesis for POMDPs with reachability objectives. In: Proceedings of the International Conference on Automated Planning and Scheduling. vol. 28, pp. 47–55 (2018)
work page 2018
-
[8]
In: Proceedings of the 26th Symposium on Operating Systems Principles
Ferraiuolo, A., Baumann, A., Hawblitzel, C., Parno, B.: Komodo: Using verification to dis- entangle secure-enclave hardware from software. In: Proceedings of the 26th Symposium on Operating Systems Principles. pp. 287–305 (2017), https://people.ece.cornell.edu/af433/ pdf/ferraiuolo-sosp-17.pdf
work page 2017
-
[9]
In: USENIX Symposium on Operating Systems Design and Implementation (OSDI)
Hawblitzel, C., Howell, J., Lorch, J., Narayan, A., Parno, B., Zhang, D., Zill, B.: Ironclad apps: End-to-end security via automated full-system verification. In: USENIX Symposium on Operating Systems Design and Implementation (OSDI). USENIX - Advanced Com- puting Systems Association (October 2014), https://www.microsoft.com/en-us/research/ publication/ir...
work page 2014
- [10]
- [11]
-
[12]
International Journal on Software Tools for Technology Transfer24(4), 589–610 (Aug 2022)
Hensel, C., Junges, S., Katoen, J.P., Quatmann, T., V olk, M.: The probabilistic model checker storm. International Journal on Software Tools for Technology Transfer24(4), 589–610 (Aug 2022). https://doi.org/10.1007/s10009-021-00633-z, https://doi.org/10.1007/s10009- 021-00633-z
-
[13]
Principles of Systems Design: Essays Dedicated to Thomas A
Jansen, N., Junges, S., Katoen, J.P.: Parameter synthesis in Markov models: A gentle survey. Principles of Systems Design: Essays Dedicated to Thomas A. Henzinger on the Occasion of His 60th Birthday pp. 407–437 (2022)
work page 2022
-
[14]
Jdeed, M., Schranz, M., Bagnato, A., Suleri, S., Prato, G., Conzon, D., Sende, M., Brosse, E., Pastrone, C., Elmenreich, W.: The cpswarm technology for designing swarms of cyber- physical systems. In: STAF (Co-Located Events). CEUR Workshop Proceedings, vol. 2405, pp. 85–90. CEUR-WS.org (2019)
work page 2019
-
[15]
Junges, S.: Parameter synthesis in Markov models. Ph.D. thesis, Dissertation, RWTH Aachen University, 2020 (2020)
work page 2020
-
[16]
CONCLUSION & DISCUSSION 23
-
[17]
Junges, S., Jansen, N., Wimmer, R., Quatmann, T., Winterer, L., Katoen, J.P., Becker, B.: Permissive finite-state controllers of pomdps using parameter synthesis (2018), https: //arxiv.org/abs/1710.10294
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[18]
Kingma, D.P., Ba, J.: Adam: A method for stochastic optimization (2017), https://arxiv.org/ abs/1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[19]
Konsta, A.M.: Synthesis and Optimal Observability for Attack Trees. Ph.D. thesis, Technical University of Denmark (2025)
work page 2025
-
[20]
(eds.) Computer Aided Verification
Konsta, A.M., Lluch Lafuente, A., Matheja, C.: What Should Be Observed for Optimal Re- ward in POMDPs? In: Gurfinkel, A., Ganesh, V . (eds.) Computer Aided Verification. pp. 373–394. Springer Nature Switzerland, Cham (2024)
work page 2024
-
[21]
Littman, M.L., Cassandra, A.R., Kaelbling, L.P.: Learning policies for partially observable environments: Scaling up. In: Prieditis, A., Russell, S. (eds.) Ma- chine Learning Proceedings 1995, pp. 362–370. Morgan Kaufmann, San Francisco (CA) (1995). https://doi.org/https://doi.org/10.1016/B978-1-55860-377-6.50052-9, https:// www.sciencedirect.com/science/...
-
[22]
In: Machine Learning Proceedings 1993, pp
McCallum, R.A.: Overcoming incomplete perception with utile distinction memory. In: Machine Learning Proceedings 1993, pp. 190–196. Morgan Kaufmann, San Francisco (CA) (1993). https://doi.org/https://doi.org/10.1016/B978-1-55860-307-3.50031-9, https:// www.sciencedirect.com/science/article/pii/B9781558603073500319
-
[23]
In: Tassarotti, J., Zetzsche, S
McLaughlin, S., Jaloyan, G., Xiang, T., Rabe, F.: Enhancing Proof Stability. In: Tassarotti, J., Zetzsche, S. (eds.) Dafny 2024 (2023)
work page 2024
-
[24]
Wiley Series in Probability and Statistics, Wiley (1994)
Puterman, M.L.: Markov Decision Processes: Discrete Stochastic Dynamic Programming. Wiley Series in Probability and Statistics, Wiley (1994). https://doi.org/10.1002/9780470316887, https://doi.org/10.1002/9780470316887
-
[25]
Storm Maintainers: Storm documentation. https://www.stormchecker.org/documentation/ usage/running-storm-on-parametric-models.html (2024), accessed: 2025-12-29
work page 2024
-
[26]
COURSERA: Neural Networks for Machine Learning (2012), ac- cessed: 2026-01-14
Tieleman, T., Hinton, G.: Lecture 6.5-rmsprop: Divide the gradient by a running average of its recent magnitude. COURSERA: Neural Networks for Machine Learning (2012), ac- cessed: 2026-01-14
work page 2012
-
[27]
In: 2023 Formal Methods in Computer- Aided Design (FMCAD)
Zhou, Y ., Bosamiya, J., Takashima, Y ., Li, J., Heule, M., Parno, B.: Mariposa: Measuring smt instability in automated program verification. In: 2023 Formal Methods in Computer- Aided Design (FMCAD). pp. 178–188 (2023). https://doi.org/10.34727/2023/isbn.978-3- 85448-060-0 26
-
[28]
Au- tonomous Robots3, 31–48 (1996)
Zilberstein, S.: Resource-bounded sensing and planning in autonomous systems. Au- tonomous Robots3, 31–48 (1996). https://doi.org/10.1007/bf00162466
-
[29]
Zvizdenco, A., Bosquetti, A.C.V .: Scaling Observation-aware Planning in Uncertain Do- mains. Master’s thesis, Technical University of Denmark (2026) 24 Adrian Zvizdenco, Arthur Bosquetti, Alberto Lluch Lafuente, et al. A Appendix: SMT Parameter Synthesis A.1 SMT Constraint Experiments 24 25 26 27 28 29 30 31 32 33 34 350 400 450 500 Instances Solved Cumu...
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.