Regeneration and Joining of the Learned Motion Primitives for Automated Vehicle Motion Planning Applications
Pith reviewed 2026-05-25 09:16 UTC · model grok-4.3
The pith
A representation method using modified dynamic movement primitives and singular value decomposition separates basic and fine-tuning shape parameters in learned motion primitives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By applying a representation algorithm based on the modified dynamic movement primitives and singular value decomposition, our method separates the basic shape parameters and fine-tuning shape parameters from the same type of demonstration trajectories in the MP library. Moreover, we convert the MP joining problem into a re-representation problem and use the characteristics of the proposed representation algorithm to achieve an accurate and smooth transition.
What carries the argument
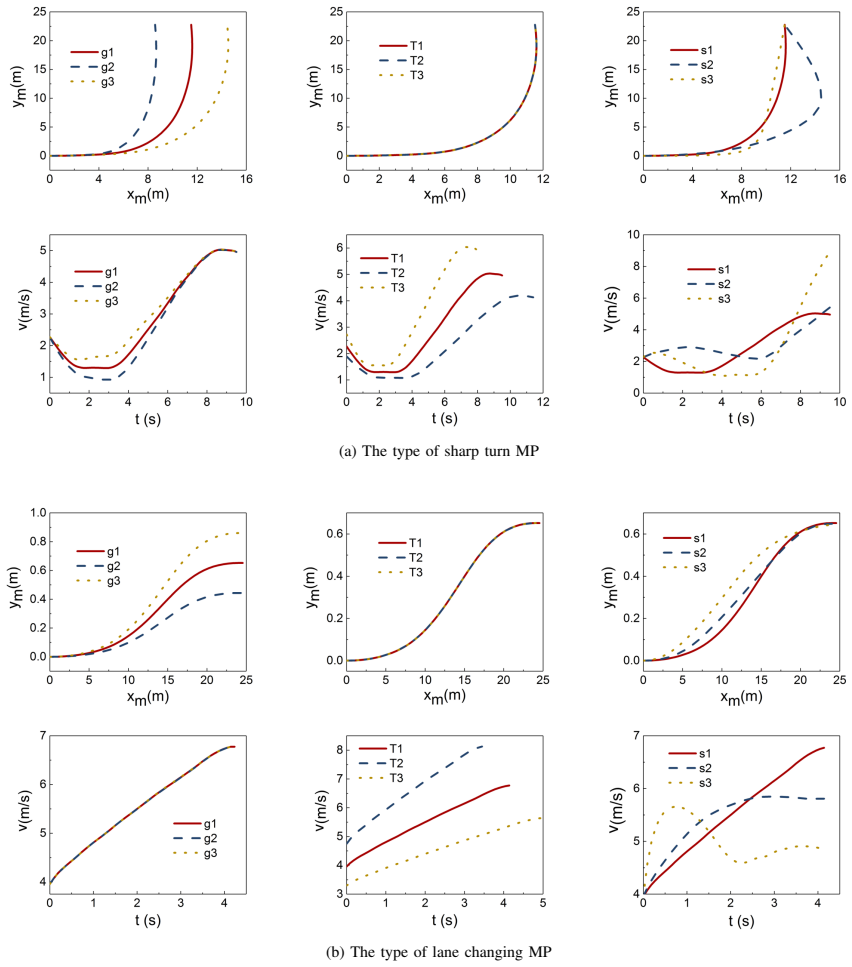
Representation algorithm based on modified dynamic movement primitives (DMPs) and singular value decomposition (SVD) separating basic shape parameters and fine-tuning shape parameters from demonstration trajectories.
If this is right
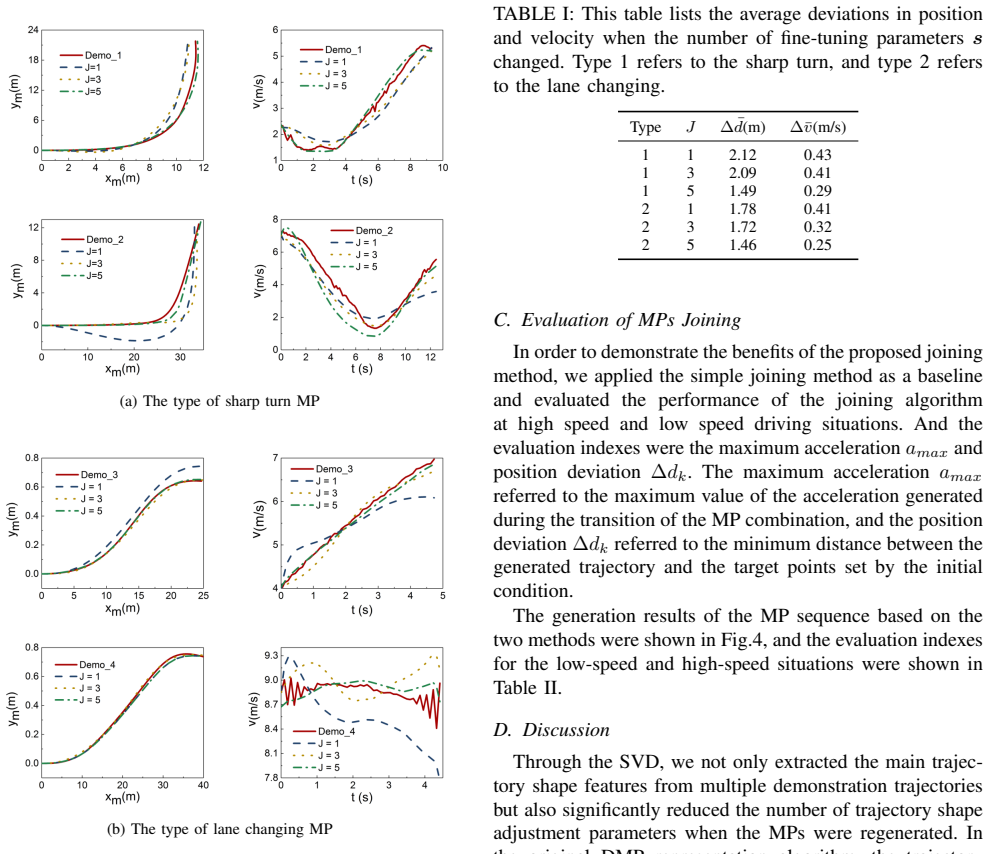
- Effectively reduces the number of shape adjustment parameters when the MPs are regenerated without affecting the accuracy of the representation.
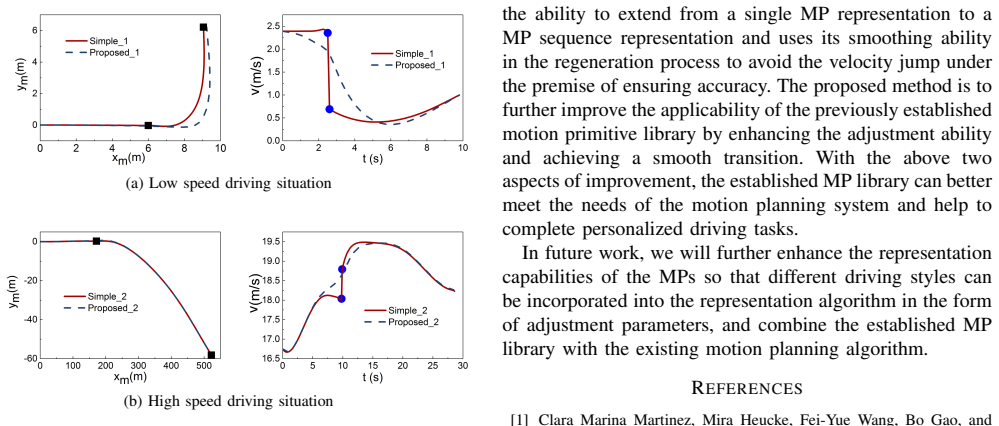
- Achieves an accurate and smooth transition by smoothing the velocity jump when the MPs are connected.
- Improves the adjustment ability of a single MP in response to different motion planning requirements.
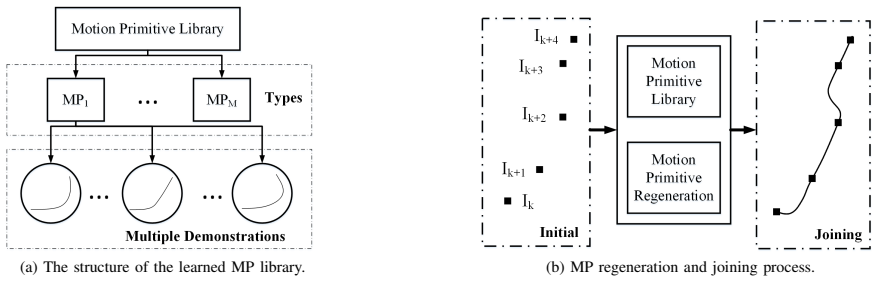
- Supports the generation of MP sequences that meet the basic requirements of MP joining.
Where Pith is reading between the lines
- Could facilitate building compact libraries of motion primitives by reusing core shapes across multiple variations in automated driving scenarios.
- May extend to other domains requiring smooth trajectory composition, such as robotic manipulation or legged locomotion.
- Potential for integration with online learning to adapt primitives in real-time based on environmental changes.
Load-bearing premise
Same-type demonstration trajectories can be decomposed via SVD into independent basic and fine-tuning shape parameters whose separation preserves representation accuracy and enables smooth joining.
What would settle it
Demonstrating that re-representing joined primitives results in velocity discontinuities larger than a threshold or representation errors exceeding those of the original unmodified DMPs.
Figures
read the original abstract
How to integrate human factors into the motion planning system is of great significance for improving the acceptance of intelligent vehicles. Decomposing motion into primitives and then accurately and smoothly joining the motion primitives (MPs) is an essential issue in the motion planning system. Therefore, the purpose of this paper is to regenerate and join the learned MPs in the library. By applying a representation algorithm based on the modified dynamic movement primitives (DMPs) and singular value decomposition (SVD), our method separates the basic shape parameters and fine-tuning shape parameters from the same type of demonstration trajectories in the MP library. Moreover, we convert the MP joining problem into a re-representation problem and use the characteristics of the proposed representation algorithm to achieve an accurate and smooth transition. This paper demonstrates that the proposed method can effectively reduce the number of shape adjustment parameters when the MPs are regenerated without affecting the accuracy of the representation. Besides, we also present the ability of the proposed method to smooth the velocity jump when the MPs are connected and evaluate its effect on the accuracy of tracking the set target points. The results show that the proposed method can not only improve the adjustment ability of a single MP in response to different motion planning requirements but also meet the basic requirements of MP joining in the generation of MP sequences.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a method for regenerating and joining learned motion primitives (MPs) for automated vehicle motion planning. Using modified dynamic movement primitives (DMPs) combined with singular value decomposition (SVD), the approach decomposes demonstration trajectories of the same type into basic shape parameters and fine-tuning shape parameters. The joining problem is reformulated as a re-representation task to achieve smooth transitions. The paper claims this reduces the number of adjustment parameters without loss of accuracy and eliminates velocity jumps at join points while maintaining target tracking accuracy.
Significance. If the SVD-based separation reliably maintains representation accuracy and guarantees C1 continuity in joined trajectories, the method would offer a practical way to increase the adaptability of motion primitive libraries in vehicle planning systems, facilitating better incorporation of human demonstration data. The conversion of joining to re-representation is a conceptually clean contribution. The approach addresses a relevant issue in human-factor integration for intelligent vehicles. However, the absence of quantitative error metrics, baseline comparisons, or dataset details makes it difficult to gauge the practical impact.
major comments (2)
- [Representation algorithm description] The central assumption that SVD on same-type trajectories cleanly separates basic and fine-tuning shape parameters such that re-representation yields velocity-jump-free (C1) joins is load-bearing for the joining claim, yet not guaranteed by SVD alone. The principal components are data-driven and may entangle position/velocity information under the nonlinear forcing term of modified DMPs; the manuscript must show explicit alignment with the DMP canonical system or provide velocity profiles at join points to substantiate smoothness.
- [Abstract and experimental evaluation] The abstract asserts that the method reduces adjustment parameters without affecting accuracy and smooths velocity jumps, but provides no quantitative results (e.g., position/velocity RMSE, number of retained singular values, or parameter counts before/after), baseline comparisons, or dataset details. This undermines evaluation of whether the data support the no-accuracy-loss and smoothing claims.
minor comments (1)
- [Abstract] The abstract states 'the results show' but contains no numerical values or figure references; consider adding one or two key quantitative findings to make the summary self-contained.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. We address the two major comments below and will incorporate revisions to strengthen the justification of the smoothness claim and the quantitative evaluation.
read point-by-point responses
-
Referee: [Representation algorithm description] The central assumption that SVD on same-type trajectories cleanly separates basic and fine-tuning shape parameters such that re-representation yields velocity-jump-free (C1) joins is load-bearing for the joining claim, yet not guaranteed by SVD alone. The principal components are data-driven and may entangle position/velocity information under the nonlinear forcing term of modified DMPs; the manuscript must show explicit alignment with the DMP canonical system or provide velocity profiles at join points to substantiate smoothness.
Authors: We agree that SVD is data-driven and does not by itself guarantee the separation of basic versus fine-tuning parameters or C1 continuity. The manuscript relies on the empirical behavior observed for the specific class of same-type vehicle trajectories under the modified DMP formulation. To address this, the revised version will include velocity profiles at the join points for all demonstrated connections, together with a brief discussion of how the canonical system timing and the SVD basis interact with the nonlinear forcing term to preserve continuity in practice. revision: yes
-
Referee: [Abstract and experimental evaluation] The abstract asserts that the method reduces adjustment parameters without affecting accuracy and smooths velocity jumps, but provides no quantitative results (e.g., position/velocity RMSE, number of retained singular values, or parameter counts before/after), baseline comparisons, or dataset details. This undermines evaluation of whether the data support the no-accuracy-loss and smoothing claims.
Authors: The referee correctly notes the absence of numerical metrics in the abstract and the limited quantitative detail in the evaluation. In the revision we will augment the abstract with concise statements of the observed parameter reduction and RMSE values, expand the experimental section with position/velocity RMSE tables, the number of retained singular values, before/after parameter counts, dataset size and source, and at least one baseline comparison against standard DMP joining. revision: yes
Circularity Check
No significant circularity; method is a procedural algorithm without self-referential reductions
full rationale
The paper presents a representation algorithm based on modified DMPs combined with SVD to decompose demonstration trajectories into basic and fine-tuning shape parameters, then reframes joining as re-representation. No equations, derivations, or fitted parameters are exhibited in the provided text that reduce the claimed separation accuracy or velocity continuity to a quantity defined by the method's own outputs. SVD and DMPs are invoked as standard external tools whose properties are used procedurally rather than tautologically. The central claims about reduced parameter count and smooth transitions are outcomes of applying these tools to data, not predictions forced by construction from the inputs. This is a normal non-finding for an algorithmic paper whose validity rests on empirical demonstration rather than self-contained mathematical closure.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Driving style recognition for intelligent vehicle control and advanced driver assistance: A survey
Clara Marina Martinez, Mira Heucke, Fei-Yue Wang, Bo Gao, and Dongpu Cao. Driving style recognition for intelligent vehicle control and advanced driver assistance: A survey. IEEE Transactions on Intelligent Transportation Systems, 19(3):666–676, 2018
work page 2018
-
[2]
Human factors in the design of human–machine interaction: An overview emphasizing v2x communication
Cristina Olaverri-Monreal and Tom ´as Jizba. Human factors in the design of human–machine interaction: An overview emphasizing v2x communication. IEEE Transactions on Intelligent Vehicles, 1(4):302– 313, 2016
work page 2016
-
[3]
Jingliang Duan, Renjie Li, Lian Hou, Wenjun Wang, Guofa Li, Shengbo Eben Li, Bo Cheng, and Hongbo Gao. Driver braking behavior analysis to improve autonomous emergency braking systems in typical chinese vehicle-bicycle conflicts. Accident Analysis & Prevention, 108:74–82, 2017
work page 2017
-
[4]
Estimation of driving style in naturalistic highway traffic using maneuver transition probabilities
Guofa Li, Shengbo Eben Li, Bo Cheng, and Paul Green. Estimation of driving style in naturalistic highway traffic using maneuver transition probabilities. Transportation Research Part C: Emerging Technologies, 74:113–125, 2017
work page 2017
-
[5]
Chunzhao Guo, Kiyosumi Kidono, Ryuta Terashima, and Yoshiko Kojima. Humanlike behavior generation in urban environment based on learning-based potentials with a low-cost lane graph. IEEE Transactions on Intelligent Vehicles, 3(1):46–60, 2018
work page 2018
-
[6]
A review of motion planning techniques for automated vehicles
David Gonz ´alez, Joshu ´e P ´erez, Vicente Milan ´es, and Fawzi Nashashibi. A review of motion planning techniques for automated vehicles. IEEE Trans. Intelligent Transportation Systems, 17(4):1135– 1145, 2016
work page 2016
-
[7]
A survey of motion planning and control techniques for self-driving urban vehicles
Brian Paden, Michal ˇC´ap, Sze Zheng Yong, Dmitry Yershov, and Emilio Frazzoli. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Transactions on intelligent vehicles, 1(1):33–55, 2016
work page 2016
-
[8]
Optimal trajectory generation for dynamic street scenarios in a frenet frame
Moritz Werling, Julius Ziegler, S ¨oren Kammel, and Sebastian Thrun. Optimal trajectory generation for dynamic street scenarios in a frenet frame. In Robotics and Automation (ICRA), 2010 IEEE International Conference on, pages 987–993. IEEE, 2010
work page 2010
-
[9]
Local path planning for off-road autonomous driving with avoidance of static obstacles
Keonyup Chu, Minchae Lee, and Myoungho Sunwoo. Local path planning for off-road autonomous driving with avoidance of static obstacles. IEEE Transactions on Intelligent Transportation Systems , 13(4):1599–1616, 2012
work page 2012
-
[10]
Xuemin Hu, Long Chen, Bo Tang, Dongpu Cao, and Haibo He. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mechanical Systems and Signal Processing, 100:482–500, 2018
work page 2018
-
[11]
Learning to select and generalize striking movements in robot table tennis
Katharina M ¨ulling, Jens Kober, Oliver Kroemer, and Jan Peters. Learning to select and generalize striking movements in robot table tennis. The International Journal of Robotics Research , 32(3):263– 279, 2013
work page 2013
-
[12]
Dynamical movement primitives: learning attractor models for motor behaviors
Auke Jan Ijspeert, Jun Nakanishi, Heiko Hoffmann, Peter Pastor, and Stefan Schaal. Dynamical movement primitives: learning attractor models for motor behaviors. Neural computation , 25(2):328–373, 2013
work page 2013
-
[13]
Rui Huang, Hong Cheng, Jing Qiu, and Jianwei Zhang. Learning physical human-robot interaction with coupled cooperative primitives for a lower exoskeleton. IEEE Transactions on Automation Science and Engineering, 2019
work page 2019
-
[14]
Skill learning and action recognition by arc-length dynamic movement primitives
Timotej Ga ˇspar, Bojan Nemec, Jun Morimoto, and Ale ˇs Ude. Skill learning and action recognition by arc-length dynamic movement primitives. Robotics and autonomous systems , 100:225–235, 2018
work page 2018
-
[15]
Adri `a Colom ´e and Carme Torras. Dimensionality reduction for dy- namic movement primitives and application to bimanual manipulation of clothes. IEEE Transactions on Robotics , 2018
work page 2018
-
[16]
On-road vehicle trajectory collection and scene-based lane change analysis: Part i
Huijing Zhao, Chao Wang, Yuping Lin, Franck Guillemard, Stephane Geronimi, and Francois Aioun. On-road vehicle trajectory collection and scene-based lane change analysis: Part i. IEEE Transactions on Intelligent Transportation Systems, 18(1):192–205, 2017
work page 2017
-
[17]
On-road vehicle trajectory collection and scene-based lane change analysis: Part ii
Wen Yao, Qiqi Zeng, Yuping Lin, Donghao Xu, Huijing Zhao, Franck Guillemard, Stephane Geronimi, and Francois Aioun. On-road vehicle trajectory collection and scene-based lane change analysis: Part ii. IEEE Transactions on Intelligent Transportation Systems , 18(1):206– 220, 2017
work page 2017
-
[18]
Naturalistic lane change analysis for human-like trajectory generation
Donghao Xu, Zhezhang Ding, Huijing Zhao, Mathieu Moze, Franc ¸ois Aioun, and Franck Guillemard. Naturalistic lane change analysis for human-like trajectory generation. In 2018 IEEE Intelligent Vehicles Symposium (IV), pages 1393–1399. IEEE, 2018
work page 2018
-
[19]
A human-like trajectory planning method by learning from naturalistic driving data
Xu He, Donghao Xu, Huijing Zhao, Mathieu Moze, Franc ¸ois Aioun, and Franck Guillemard. A human-like trajectory planning method by learning from naturalistic driving data. In 2018 IEEE Intelligent Vehicles Symposium (IV), pages 339–346. IEEE, 2018
work page 2018
-
[20]
A driver steering model with personalized desired path generation
Scott Schnelle, Junmin Wang, Haijun Su, and Richard Jagacinski. A driver steering model with personalized desired path generation. IEEE Transactions on Systems, Man, and Cybernetics: Systems , 47(1):111– 120, 2017
work page 2017
-
[21]
Jinxiang Wang, Junmin Wang, Rongrong Wang, and Chuan Hu. A framework of vehicle trajectory replanning in lane exchanging with considerations of driver characteristics. IEEE Transactions on Vehicular Technology, 66(5):3583–3596, 2017
work page 2017
-
[22]
Learning and generalizing motion primitives from driving data for path-tracking applications
Boyang Wang, Zirui Li, Jianwei Gong, Yidi Liu, Huiyan Chen, and Chao Lu. Learning and generalizing motion primitives from driving data for path-tracking applications. In 2018 IEEE Intelligent Vehicles Symposium (IV), pages 1191–1196. IEEE, 2018
work page 2018
-
[23]
Boyang Wang, Jianwei Gong, Ruizeng Zhang, and Huiyan Chen. Learning to segment and represent motion primitives from driving data for motion planning applications. In 2018 21st International Conference on Intelligent Transportation Systems (ITSC), pages 1408–
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.