Safe and Generalizable Hierarchical Multi-Agent RL via Constraint Manifold Control
Pith reviewed 2026-06-26 07:52 UTC · model grok-4.3
The pith
A hierarchical multi-agent RL framework enforces hard safety at the low level via constraint manifolds while learning coordination at the high level.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
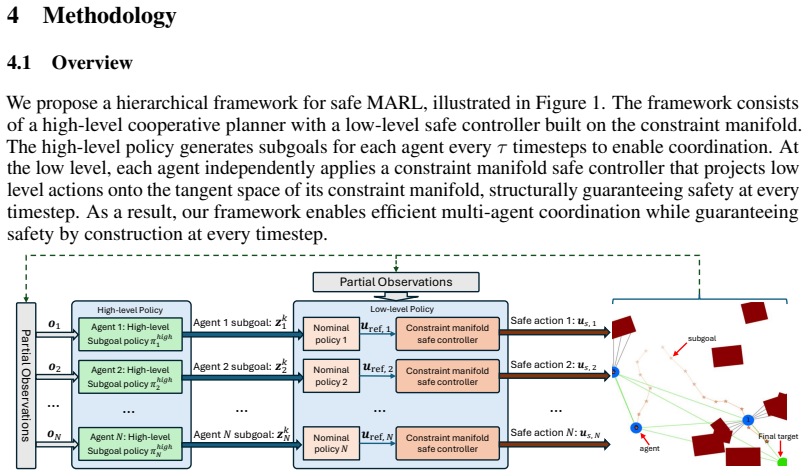
By enforcing hard safety constraints via a constraint manifold at the low level of a hierarchical multi-agent RL setup, the method provides theoretical safety guarantees in the multi-agent setting and yields stationary learning dynamics for stable training, while high-level policies enable coordination that achieves competitive performance, nearly perfect safety rates, and effective generalization to varying numbers of agents and obstacles.
What carries the argument
The constraint manifold at the low level, which enforces hard safety constraints, combined with high-level policy learning for coordination.
If this is right
- Theoretical safety guarantees hold in the multi-agent setting.
- Learning dynamics become stationary, enabling stable and efficient training.
- The method achieves competitive performance while maintaining nearly perfect safety rates.
- Performance and safety generalize effectively to varying numbers of agents and obstacles.
Where Pith is reading between the lines
- The low-level manifold could integrate with existing single-agent safe control techniques without retraining the full system.
- Generalization to different agent counts suggests the framework may scale to larger teams by adjusting only the high-level policy.
- Stationary dynamics could reduce sensitivity to hyperparameter choices during multi-agent training.
Load-bearing premise
Hard safety constraints can be enforced at the low level via a constraint manifold under mild assumptions in the multi-agent setting.
What would settle it
An empirical test in a multi-agent scenario with new agent counts or obstacle layouts where the low-level controller violates a safety constraint or where learning fails to remain stationary.
Figures
read the original abstract
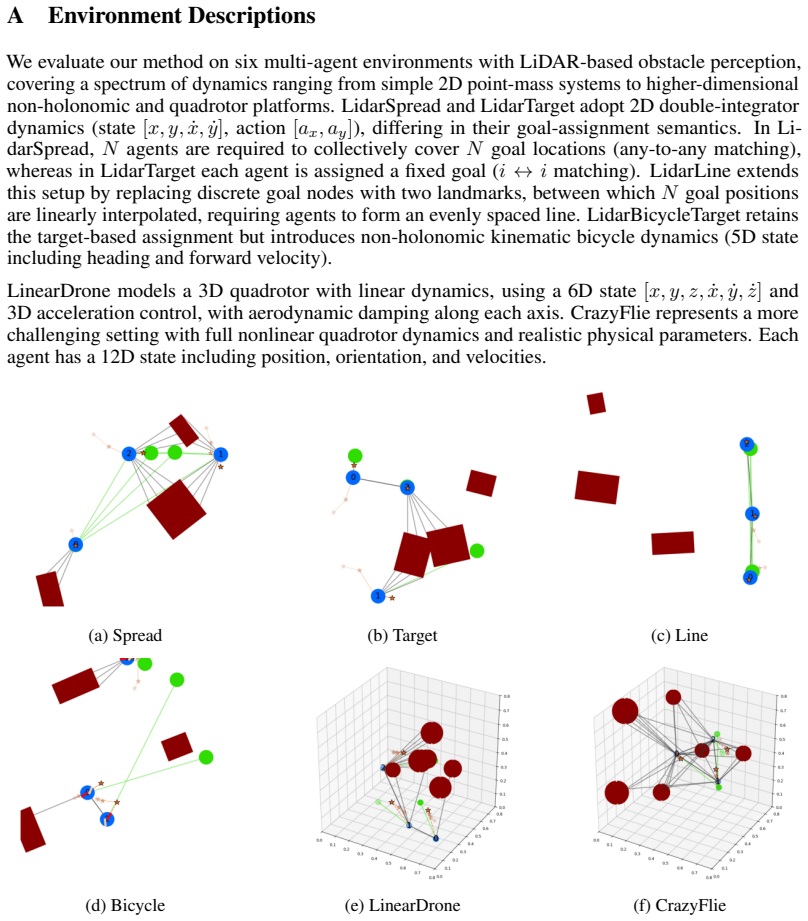
Multi-agent systems are widely used in safety-critical applications that require coordinated behavior under strict safety constraints. Existing approaches face a fundamental trade-off: learning-based methods achieve strong empirical performance but lack theoretical safety guarantees, while control-theoretic methods enforce safety but often lead to overly conservative and inefficient behaviors. We propose a hierarchical multi-agent reinforcement learning framework that enforces hard safety constraints under mild assumptions at low level via a constraint manifold, while enabling effective coordination through high-level policy learning. Our approach provides theoretical safety guarantees in the multi-agent setting and yields stationary learning dynamics, thereby enabling stable and efficient training. Empirically, our method achieves competitive performance while maintaining nearly perfect safety rates, and generalizes effectively to varying numbers of agents and obstacles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hierarchical multi-agent RL framework that enforces hard safety constraints at the low level via a constraint manifold under mild assumptions, while using high-level policy learning for coordination. It claims theoretical safety guarantees in the multi-agent setting together with stationary learning dynamics that enable stable training, and reports empirical results showing competitive performance, near-perfect safety rates, and effective generalization to varying numbers of agents and obstacles.
Significance. If the theoretical claims hold, the work would meaningfully address the safety-performance trade-off in multi-agent systems by combining control-theoretic hard constraints with learning-based coordination. The reported generalization across agent counts and the stationary dynamics would be practically valuable for scalable, reliable deployment in safety-critical domains.
major comments (2)
- [Abstract] Abstract: the central claim that hard safety constraints are enforced via a constraint manifold under mild multi-agent assumptions is load-bearing for all theoretical guarantees, yet no construction of the manifold, no statement of the mild assumptions, and no derivation showing how stationarity follows are supplied, preventing verification that safety quantities do not reduce to self-referential definitions or fitted parameters.
- [Abstract] Abstract (proposed framework paragraph): the assertion of 'theoretical safety guarantees in the multi-agent setting' and 'stationary learning dynamics' cannot be evaluated because the manuscript supplies neither proof sketches nor the equations that would establish invariance of the constraint manifold or convergence of the hierarchical updates.
Simulated Author's Rebuttal
We thank the referee for the careful review and for identifying areas where the abstract could better support the central claims. We address each major comment below and will revise the abstract to improve clarity and explicitness while preserving the manuscript's technical content.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that hard safety constraints are enforced via a constraint manifold under mild multi-agent assumptions is load-bearing for all theoretical guarantees, yet no construction of the manifold, no statement of the mild assumptions, and no derivation showing how stationarity follows are supplied, preventing verification that safety quantities do not reduce to self-referential definitions or fitted parameters.
Authors: The abstract is intentionally concise, but the full manuscript provides the construction, assumptions, and derivation in the main body. Section 3 defines the constraint manifold explicitly as the zero superlevel set of per-agent safety functions derived from control barrier functions; Assumption 1 lists the mild conditions (control-affine dynamics, bounded interactions, and manifold feasibility); and Lemma 1 derives stationarity by showing that low-level projection renders the effective transition kernel independent of high-level parameters. We will revise the abstract to include one-sentence summaries of the manifold construction, the assumptions, and the stationarity argument, each with a citation to the corresponding section. This grounds the claims in explicit definitions rather than self-reference. revision: yes
-
Referee: [Abstract] Abstract (proposed framework paragraph): the assertion of 'theoretical safety guarantees in the multi-agent setting' and 'stationary learning dynamics' cannot be evaluated because the manuscript supplies neither proof sketches nor the equations that would establish invariance of the constraint manifold or convergence of the hierarchical updates.
Authors: The manuscript supplies both the sketches and equations in the body. Theorem 1 establishes multi-agent safety via a composite Lyapunov function demonstrating manifold invariance under the low-level controller; Proposition 2 proves stationarity of the closed-loop dynamics; and the convergence of hierarchical updates follows from a contraction argument in the high-level learner (detailed after Proposition 2). We will revise the abstract to reference these results and include a brief indication of the invariance argument (e.g., non-positive derivative of the safety function on the manifold). Should the referee prefer key equations moved into the abstract itself, we can accommodate that in the revision. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract and context contain only high-level claims about safety guarantees via a constraint manifold and stationary dynamics, with no equations, derivations, or parameter-fitting steps visible. No self-definitional reductions, fitted inputs renamed as predictions, or load-bearing self-citations are present in the text. The reader's assessment explicitly notes the absence of equations, confirming that no specific reduction to inputs by construction can be exhibited. This qualifies as an honest non-finding under the rules, as the derivation chain cannot be walked without visible mathematical content.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Hard safety constraints can be enforced at the low level via a constraint manifold under mild assumptions in the multi-agent setting.
invented entities (1)
-
constraint manifold
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range , year=
Goarin, Manohari and Li, Guanrui and Saviolo, Alessandro and Loianno, Giuseppe , booktitle=. Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range , year=
-
[2]
IEEE Transactions on Robotics , volume=
Gcbf+: A neural graph control barrier function framework for distributed safe multiagent control , author=. IEEE Transactions on Robotics , volume=. 2025 , publisher=
2025
-
[3]
arXiv preprint arXiv:2502.03640 , year=
Discrete GCBF proximal policy optimization for multi-agent safe optimal control , author=. arXiv preprint arXiv:2502.03640 , year=
-
[4]
IEEE Transactions on Automatic Control , volume=
Control barrier function based quadratic programs for safety critical systems , author=. IEEE Transactions on Automatic Control , volume=. 2016 , publisher=
2016
-
[5]
International conference on machine learning , pages=
Scalable multi-agent reinforcement learning through intelligent information aggregation , author=. International conference on machine learning , pages=. 2023 , organization=
2023
-
[6]
arXiv preprint arXiv:2110.02793 , year=
Multi-agent constrained policy optimisation , author=. arXiv preprint arXiv:2110.02793 , year=
-
[7]
Artificial Intelligence , volume=
Safe multi-agent reinforcement learning for multi-robot control , author=. Artificial Intelligence , volume=. 2023 , publisher=
2023
-
[8]
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications , year=
Liu, Puze and Bou-Ammar, Haitham and Peters, Jan and Tateo, Davide , journal=. Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications , year=
-
[9]
Proceedings of the 33rd Annual ACM Symposium on Applied Computing , pages=
Distributed optimization in multi-agent robotics for industry 4.0 warehouses , author=. Proceedings of the 33rd Annual ACM Symposium on Applied Computing , pages=
-
[10]
arXiv preprint arXiv:2408.09675 , year=
Multi-agent reinforcement learning for autonomous driving: A survey , author=. arXiv preprint arXiv:2408.09675 , year=
-
[11]
IEEE Transactions on Vehicular Technology , volume=
Multi-agent deep reinforcement learning for urban traffic light control in vehicular networks , author=. IEEE Transactions on Vehicular Technology , volume=. 2020 , publisher=
2020
-
[12]
The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
HMARL-CBF--Hierarchical Multi-Agent Reinforcement Learning with Control Barrier Functions for Safety-Critical Autonomous Systems , author=. The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
-
[13]
Advances in Neural Information Processing Systems , volume=
Multi-agent first order constrained optimization in policy space , author=. Advances in Neural Information Processing Systems , volume=
-
[14]
2021 , publisher=
Constrained Markov decision processes , author=. 2021 , publisher=
2021
-
[15]
International Conference on Machine Learning , pages=
Crpo: A new approach for safe reinforcement learning with convergence guarantee , author=. International Conference on Machine Learning , pages=. 2021 , organization=
2021
-
[16]
Advances in neural information processing systems , volume=
A lyapunov-based approach to safe reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[17]
arXiv preprint arXiv:1901.10031 , year=
Lyapunov-based safe policy optimization for continuous control , author=. arXiv preprint arXiv:1901.10031 , year=
Pith/arXiv arXiv 1901
-
[18]
Proceedings of the AAAI conference on artificial intelligence , volume=
Ipo: Interior-point policy optimization under constraints , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[19]
Systems & control letters , volume=
An actor-critic algorithm for constrained Markov decision processes , author=. Systems & control letters , volume=. 2005 , publisher=
2005
-
[20]
arXiv preprint arXiv:1805.11074 , year=
Reward constrained policy optimization , author=. arXiv preprint arXiv:1805.11074 , year=
-
[21]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Autocost: Evolving intrinsic cost for zero-violation reinforcement learning , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[22]
arXiv preprint arXiv:2307.07176 , year=
Safedreamer: Safe reinforcement learning with world models , author=. arXiv preprint arXiv:2307.07176 , year=
-
[23]
Advances in Neural Information Processing Systems , volume=
Natural policy gradient primal-dual method for constrained markov decision processes , author=. Advances in Neural Information Processing Systems , volume=
-
[24]
International conference on machine learning , pages=
Constrained policy optimization , author=. International conference on machine learning , pages=. 2017 , organization=
2017
-
[25]
Joint european conference on machine learning and knowledge discovery in databases , pages=
Cmix: Deep multi-agent reinforcement learning with peak and average constraints , author=. Joint european conference on machine learning and knowledge discovery in databases , pages=. 2021 , organization=
2021
-
[26]
Learning for dynamics and control conference , pages=
Provably efficient generalized lagrangian policy optimization for safe multi-agent reinforcement learning , author=. Learning for dynamics and control conference , pages=. 2023 , organization=
2023
-
[27]
Proceedings of the AAAI conference on artificial intelligence , volume=
Decentralized policy gradient descent ascent for safe multi-agent reinforcement learning , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[28]
IEEE Transactions on Vehicular Technology , volume=
A reinforcement learning framework for vehicular network routing under peak and average constraints , author=. IEEE Transactions on Vehicular Technology , volume=. 2023 , publisher=
2023
-
[29]
IEEE Transactions on Automatic Control , volume=
Safe reinforcement learning using robust MPC , author=. IEEE Transactions on Automatic Control , volume=. 2020 , publisher=
2020
-
[30]
arXiv preprint arXiv:2305.14154 , year=
Solving stabilize-avoid optimal control via epigraph form and deep reinforcement learning , author=. arXiv preprint arXiv:2305.14154 , year=
-
[31]
Advances in Neural Information Processing Systems , volume=
Iterative reachability estimation for safe reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[32]
IEEE Robotics and Automation Letters , volume=
A predictive safety filter for learning-based racing control , author=. IEEE Robotics and Automation Letters , volume=. 2021 , publisher=
2021
-
[33]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
The safety filter: A unified view of safety-critical control in autonomous systems , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2023 , publisher=
2023
-
[34]
IFAC-PapersOnLine , volume=
Optimal control barrier functions for RL based safe powertrain control , author=. IFAC-PapersOnLine , volume=. 2023 , publisher=
2023
-
[35]
Proceedings of the AAAI conference on artificial intelligence , volume=
End-to-end safe reinforcement learning through barrier functions for safety-critical continuous control tasks , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[36]
IEEE Robotics and Automation Letters , volume=
Safe reinforcement learning using robust control barrier functions , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[37]
Conference on robot learning , pages=
Safe optimal control using stochastic barrier functions and deep forward-backward sdes , author=. Conference on robot learning , pages=. 2021 , organization=
2021
-
[38]
arXiv preprint arXiv:2202.10658 , year=
Decentralized safe multi-agent stochastic optimal control using deep FBSDEs and ADMM , author=. arXiv preprint arXiv:2202.10658 , year=
-
[39]
Conference on robot learning , pages=
Accelerating reinforcement learning with learned skill priors , author=. Conference on robot learning , pages=. 2021 , organization=
2021
-
[40]
Advances in neural information processing systems , volume=
Reinforcement learning with hierarchies of machines , author=. Advances in neural information processing systems , volume=
-
[41]
Journal of artificial intelligence research , volume=
Hierarchical reinforcement learning with the MAXQ value function decomposition , author=. Journal of artificial intelligence research , volume=
-
[42]
Artificial intelligence , volume=
Between MDPs and semi-MDPs: A framework for temporal abstraction in reinforcement learning , author=. Artificial intelligence , volume=. 1999 , publisher=
1999
-
[43]
Proceedings of the AAAI conference on artificial intelligence , volume=
Haven: Hierarchical cooperative multi-agent reinforcement learning with dual coordination mechanism , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[44]
Autonomous Agents and Multi-Agent Systems , volume=
Hierarchical multi-agent reinforcement learning , author=. Autonomous Agents and Multi-Agent Systems , volume=. 2006 , publisher=
2006
-
[45]
International conference on machine learning , pages=
Qtran: Learning to factorize with transformation for cooperative multi-agent reinforcement learning , author=. International conference on machine learning , pages=. 2019 , organization=
2019
-
[46]
arXiv preprint arXiv:1901.08492 , year=
Feudal multi-agent hierarchies for cooperative reinforcement learning , author=. arXiv preprint arXiv:1901.08492 , year=
Pith/arXiv arXiv 1901
-
[47]
Proceedings of the AAAI conference on artificial intelligence , volume=
A deep hierarchical approach to lifelong learning in minecraft , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[48]
Conference on Robot Learning , pages=
Robot reinforcement learning on the constraint manifold , author=. Conference on Robot Learning , pages=. 2022 , organization=
2022
-
[49]
2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Safe reinforcement learning of dynamic high-dimensional robotic tasks: navigation, manipulation, interaction , author=. 2023 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2023 , organization=
2023
-
[50]
IEEE Transactions on Automation Science and Engineering , volume=
ROSCOM: Robust safe reinforcement learning on stochastic constraint manifolds , author=. IEEE Transactions on Automation Science and Engineering , volume=. 2024 , publisher=
2024
-
[51]
arXiv preprint arXiv:2409.12045 , year=
Handling long-term safety and uncertainty in safe reinforcement learning , author=. arXiv preprint arXiv:2409.12045 , year=
-
[52]
2023 , publisher=
An introduction to optimization on smooth manifolds , author=. 2023 , publisher=
2023
-
[53]
Introduction to smooth manifolds , pages=
Smooth manifolds , author=. Introduction to smooth manifolds , pages=. 2003 , publisher=
2003
-
[54]
Advances in neural information processing systems , volume=
The surprising effectiveness of ppo in cooperative multi-agent games , author=. Advances in neural information processing systems , volume=
-
[55]
arXiv preprint arXiv:1710.10903 , year=
Graph attention networks , author=. arXiv preprint arXiv:1710.10903 , year=
-
[56]
Nonlinear control , author=
-
[57]
Advances in neural information processing systems , volume=
Data-efficient hierarchical reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[58]
Proceedings of the fifth international conference on Autonomous agents , pages=
Hierarchical multi-agent reinforcement learning , author=. Proceedings of the fifth international conference on Autonomous agents , pages=
-
[59]
IEEE Robotics and Automation Letters , volume=
LiDAR-based online control barrier function synthesis for safe navigation in unknown environments , author=. IEEE Robotics and Automation Letters , volume=. 2023 , publisher=
2023
-
[60]
Conference on robot learning , pages=
Decentralized control of quadrotor swarms with end-to-end deep reinforcement learning , author=. Conference on robot learning , pages=. 2022 , organization=
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.