parallelcbf: A composable safety-filter and auditability framework for tensor-parallel reinforcement learning
Pith reviewed 2026-05-19 15:47 UTC · model grok-4.3
The pith
ParallelCBF unifies tensor-parallel UAV environments, hard-gate CBF safety filters, sharded BC-to-RL pipelines, and first-class operational auditability as composable APIs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
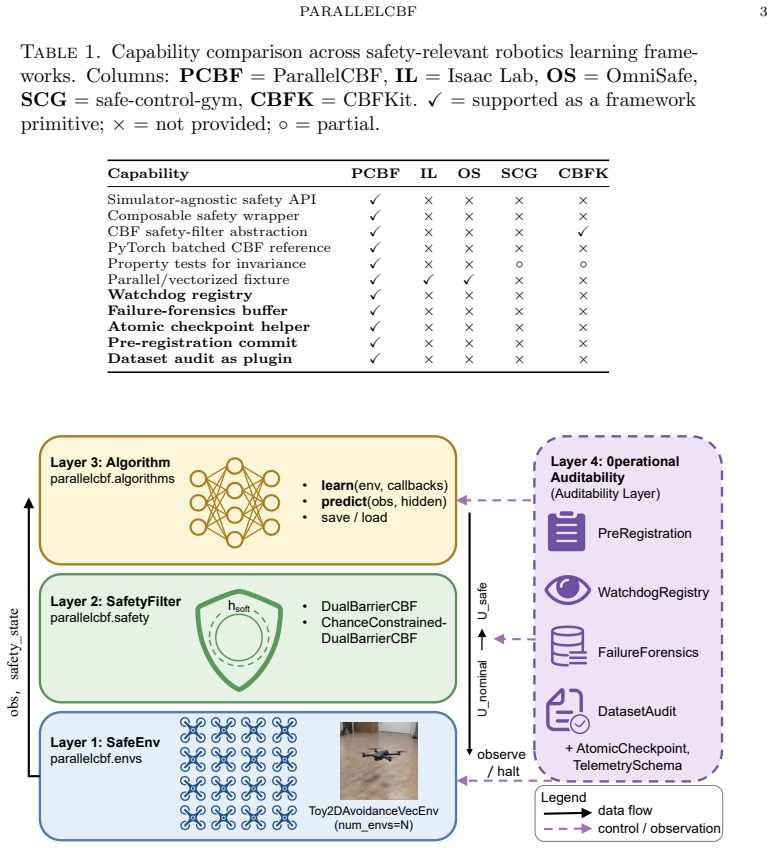
ParallelCBF supplies a four-layer composable API that integrates tensor-parallel UAV environments, hard-gate CBF safety filters (with a dual-barrier squared and linear-predictive implementation), sharded BC-to-RL pipelines, and first-class operational auditability primitives including pre-registration, watchdog registries, failure forensics, and dataset audits. The release includes a CPU PyTorch reference implementation, property-based safety invariance tests that finish in 1.67 seconds across a 39-test suite for varying vectorized batch sizes, and a 31,415-episode behavior-cloning dataset whose curriculum mix, per-bucket yields, and SHA-256 hash remain auditable through the framework's own
What carries the argument
The four-layer composable API whose ops primitives embed pre-registration, watchdog registries, failure forensics, and dataset audits as first-class architectural requirements rather than user scripts.
If this is right
- Safety invariance can be verified across vectorized batch sizes with a 39-test suite completing in 1.67 seconds.
- A 31,415-episode behavior-cloning collection can expose its curriculum mix, yields, and dataset SHA-256 through built-in ops primitives.
- A training stage that fails pre-registered convergence criteria can be halted automatically before a degraded checkpoint propagates.
- End-to-end safety-constrained pipelines become possible without separate user code for safety filtering or record keeping.
Where Pith is reading between the lines
- This built-in audit layer could reduce silent failures in other large-scale RL experiments if similar primitives are added to existing simulators.
- The dual-barrier CBF reference implementation might serve as a starting point for safety filters in non-UAV control tasks once the API is extended.
- Researchers working on constrained RL benchmarks could adopt the framework's test suite to compare safety methods under parallel execution.
Load-bearing premise
No existing framework already supplies the specific unification of tensor-parallel UAV simulation, hard CBF gating, sharded BC-to-RL pipelines, and integrated auditability primitives, and that embedding auditability as an architectural necessity is required for reproducible robotics research.
What would settle it
Discovery of a prior open-source framework that delivers the same four capabilities through equivalent composable APIs without requiring users to write custom integration or audit scripts.
Figures


read the original abstract
While Isaac Lab provides massive parallel UAV simulation, OmniSafe and safe-control-gym provide constrained-RL benchmarks, and CBFKit provides control-barrier-function synthesis tooling, no existing framework unifies these capabilities for end-to-end safety-constrained training. ParallelCBF is the first framework to unify (i)~tensor-parallel UAV environments, (ii)~hard-gate CBF safety filters, (iii)~sharded BC-to-RL pipelines, and (iv)~first-class operational auditability -- pre-registration, watchdog registries, failure forensics, and dataset audits as composable APIs rather than user-implemented scripts. We release ParallelCBF v0.1.0 under Apache~2.0 with a four-layer composable API, a CPU PyTorch reference implementation of a dual-barrier (squared / linear-predictive) CBF, property-based safety invariance tests across vectorized batch sizes that complete in 1.67~s for the full 39-test suite, and a 31{,}415-episode behavior-cloning collection campaign whose curriculum mix, per-bucket yields, and dataset SHA-256 are auditable through the framework's own \texttt{ops} primitives. We report a representative end-to-end pipeline execution in which the framework's auditability layer halted a downstream training stage that did not meet pre-registered convergence criteria, preventing silent propagation of a degraded checkpoint -- an architectural property we argue is necessary, not merely useful, for reproducible empirical robotics research. The framework is installable via \texttt{pip install parallelcbf}; source and release artifacts are available at https://github.com/xiaoyang-123-cell/ParallelCBF.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents ParallelCBF v0.1.0, a composable framework unifying (i) tensor-parallel UAV environments, (ii) hard-gate CBF safety filters with a dual-barrier (squared/linear-predictive) CPU PyTorch implementation, (iii) sharded BC-to-RL pipelines, and (iv) first-class operational auditability primitives including pre-registration, watchdog registries, failure forensics, and SHA-256 dataset audits. It releases the package under Apache 2.0 (pip installable), reports a 39-test property-based safety invariance suite completing in 1.67 s, a 31,415-episode BC dataset with auditable curriculum and SHA-256, and demonstrates the audit layer halting a downstream training run that failed pre-registered convergence criteria.
Significance. If the unification and architectural auditability claims hold, the work could advance reproducible safety-constrained RL for robotics by treating auditability as a first-class, non-optional layer rather than user scripts. Concrete strengths include the released code and dataset with cryptographic audit hash, the fast property-based test suite, and the explicit halted-training example that illustrates prevention of silent checkpoint propagation.
major comments (1)
- [Abstract] Abstract: the central claim that 'no existing framework unifies these capabilities' and that ParallelCBF is 'the first' to deliver the four-layer composable API (tensor-parallel sim + hard CBF gating + sharded BC-to-RL + integrated auditability) is not supported by any systematic comparison or table evaluating possible compositions/extensions of Isaac Lab, OmniSafe, safe-control-gym, and CBFKit. This absence is load-bearing for the novelty assertion.
minor comments (2)
- The abstract states that the 39-test suite covers 'vectorized batch sizes' but does not report the specific batch-size range or per-test timing breakdown.
- Consider adding a short table in the introduction or methods contrasting the four-layer API surface against the individual contrasted frameworks to make the composability argument more concrete.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'no existing framework unifies these capabilities' and that ParallelCBF is 'the first' to deliver the four-layer composable API (tensor-parallel sim + hard CBF gating + sharded BC-to-RL + integrated auditability) is not supported by any systematic comparison or table evaluating possible compositions/extensions of Isaac Lab, OmniSafe, safe-control-gym, and CBFKit. This absence is load-bearing for the novelty assertion.
Authors: We agree that the novelty assertion in the abstract would be strengthened by explicit support. The current manuscript text notes the individual contributions of Isaac Lab (tensor-parallel UAV simulation), OmniSafe and safe-control-gym (constrained-RL benchmarks), and CBFKit (CBF synthesis tooling), but does not provide a side-by-side table. In the revised manuscript we will insert a comparison table that evaluates these frameworks (and their documented extension points) against the four dimensions of (i) tensor-parallel UAV environments, (ii) hard-gate CBF safety filters, (iii) sharded BC-to-RL pipelines, and (iv) first-class operational auditability primitives. The table will clarify the specific unification and auditability layer that ParallelCBF introduces as composable APIs. revision: yes
Circularity Check
No significant circularity in framework release and demonstration.
full rationale
The paper presents a software framework release (ParallelCBF) with composable APIs for tensor-parallel simulation, CBF safety filters, BC-to-RL pipelines, and auditability primitives. No mathematical derivation chain, equations, predictions, or first-principles results exist that could reduce to inputs by construction. Claims of unification rest on explicit contrasts to external tools (Isaac Lab, OmniSafe, safe-control-gym, CBFKit) plus released code, pip package, GitHub artifacts, and a concrete runtime demonstration of the audit layer halting training. These elements are externally verifiable and do not rely on self-referential definitions, fitted parameters renamed as predictions, or load-bearing self-citations. The contribution is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
DualBarrierCBF provides a two-barrier formulation: h_hard(x) = ||r||^2 - R^2 (squared, hard non-collision) and h_soft(x, v) = ||r|| - R - D_t(v) (linear, predictive)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Control barrier functions: Theory and applications
Aaron D Ames, Samuel Coogan, Magnus Egerstedt, Gennaro Notomista, Koushil Sreenath, and Paulo Tabuada. Control barrier functions: Theory and applications. In2019 18th European control conference (ECC), pages 3420–3431. Ieee, 2019
work page 2019
-
[2]
Cbfkit: A control barrier function toolbox for robotics applications, 2024
Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, and Danil Prokhorov. Cbfkit: A control barrier function toolbox for robotics applications, 2024
work page 2024
-
[3]
Mamba: Linear-time sequence modeling with selective state spaces, 2023
Albert Gu and Tri Dao. Mamba: Linear-time sequence modeling with selective state spaces, 2023
work page 2023
-
[4]
Deep reinforcement learning that matters
Peter Henderson, Riashat Islam, Philip Bachman, Joelle Pineau, Doina Precup, and David Meger. Deep reinforcement learning that matters. InProceedings of the AAAI conference on artificial intelligence, volume 32, 2018
work page 2018
-
[5]
Safety gymnasium: A unified safe reinforcement learning benchmark
Jiaming Ji, Borong Zhang, Jiayi Zhou, Xuehai Pan, Weidong Huang, Ruiyang Sun, Yiran Geng, Yifan Zhong, Josef Dai, and Yaodong Yang. Safety gymnasium: A unified safe reinforcement learning benchmark. volume 36, pages 18964–18993, 2023
work page 2023
-
[6]
Omnisafe: An infrastructure for accelerating safe reinforcement learning research, 2024
Jiaming Ji, Jiayi Zhou, Borong Zhang, Juntao Dai, Xuehai Pan, Ruiyang Sun, Weidong Huang, Yiran Geng, Mickel Liu, and Yaodong Yang. Omnisafe: An infrastructure for accelerating safe reinforcement learning research, 2024
work page 2024
-
[7]
David R MacIver, Zac Hatfield-Dodds, et al. Hypothesis: A new approach to property-based testing.Journal of Open Source Software, 4(43):1891, 2019
work page 2019
-
[8]
Mayank Mittal, Calvin Yu, Qinxi Yu, Jingzhou Liu, Nikita Rudin, David Hoeller, Jia Lin Yuan, Ritvik Singh, Yunrong Guo, Hammad Mazhar, et al. Orbit: A unified simulation framework for interactive robot learning environments.IEEE Robotics and Automation Letters, 8(6):3740–3747, 2023
work page 2023
-
[9]
Joelle Pineau, Philippe Vincent-Lamarre, Koustuv Sinha, Vincent Larivi` ere, Alina Beygelzimer, Florence d’Alch´ e Buc, Emily Fox, and Hugo Larochelle. Improving reproducibility in machine learning research (a report from the neurips 2019 reproducibility program).Journal of machine learning research, 22(164):1–20, 2021
work page 2019
-
[10]
Antonin Raffin, Ashley Hill, Adam Gleave, Anssi Kanervisto, Maximilian Ernestus, and Noah Dormann. Stable-baselines3: Reliable reinforcement learning implementations.Journal of machine learning research, 22(268):1–8, 2021
work page 2021
-
[11]
A reduction of imitation learning and structured prediction to no-regret online learning
St´ ephane Ross, Geoffrey Gordon, and Drew Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. InProceedings of the fourteenth international conference on artificial intelligence and statistics, pages 627–635. JMLR Workshop and Conference Proceedings, 2011
work page 2011
-
[12]
Proximal policy optimiza- tion algorithms, 2017
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimiza- tion algorithms, 2017
work page 2017
-
[13]
Bartolomeo Stellato, Goran Banjac, Paul Goulart, Alberto Bemporad, and Stephen Boyd. Osqp: an operator splitting solver for quadratic programs.Mathematical Programming Computation, 12(4):637–672, February 2020
work page 2020
-
[14]
Zhaocong Yuan, Adam W Hall, Siqi Zhou, Lukas Brunke, Melissa Greeff, Jacopo Panerati, and Angela P Schoellig. Safe-control-gym: A unified benchmark suite for safe learning-based control and reinforcement learning in robotics.IEEE Robotics and Automation Letters, 7(4):11142–11149, 2022. Xinjiang Key Laboratory of Intelligent Computing and Smart Application...
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.