TRACE: Trajectory-Routed Causal Memory for Delayed-Evidence Visuomotor Imitation
Pith reviewed 2026-06-27 04:35 UTC · model grok-4.3
The pith
TRACE stores task evidence in bounded memory using the robot's own trajectory path as the retrieval key.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
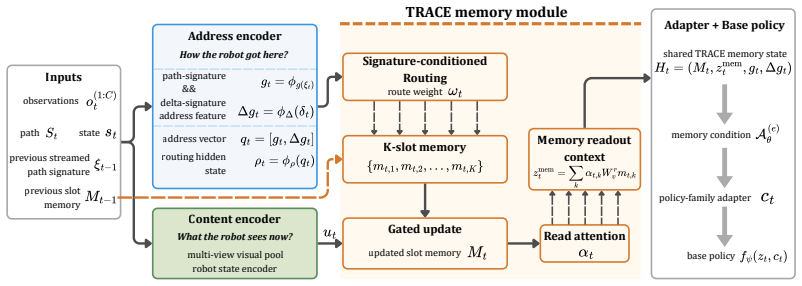
TRACE stores task-relevant visual and robot-state evidence in a fixed-size latent memory keyed by path signatures of the executed robot-state trajectory, enabling the policy to retrieve the appropriate evidence at later ambiguous observations without storing the original visual cue or relying on raw time or manual labels.
What carries the argument
Path signatures of the executed robot-state trajectory, serving as compact order-sensitive features that act as trajectory-conditioned keys for writing and retrieving evidence in the memory.
If this is right
- Fixed memory size remains bounded even as task horizons grow longer.
- No requirement for manual task labels or time-based indexing to manage evidence.
- Existing imitation policies can incorporate the memory through adapters without altering the backbone, action head, or training objective.
- Branch selection accuracy and overall task success increase on long-horizon tasks that contain visually similar decision points.
Where Pith is reading between the lines
- The same trajectory-keyed memory could be applied to navigation or exploration domains where location ambiguity arises after an initial observation disappears.
- Combining trajectory signatures with other memory mechanisms might allow hybrid systems that handle both transient and persistent context.
- If path signatures prove robust across different robot morphologies, the approach could reduce the need for task-specific memory engineering in imitation learning.
Load-bearing premise
Path signatures computed from the robot's trajectory are distinctive enough to correctly match stored evidence to the right future decision points even when visual cues are absent.
What would settle it
A controlled test in which two different early cues produce robot trajectories whose path signatures are nearly identical yet require opposite later actions, and the memory system retrieves the wrong evidence at the branch point.
Figures

read the original abstract
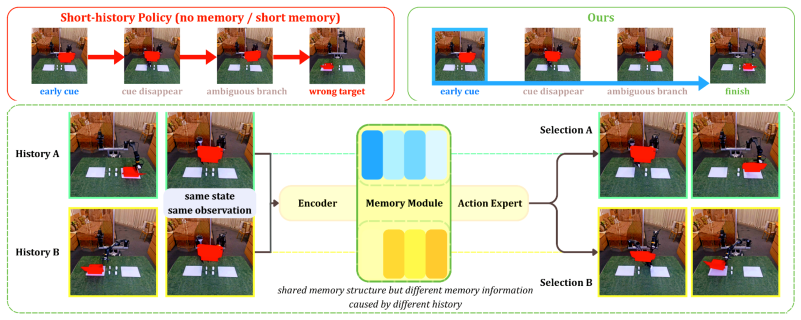
Robots under autonomous operation may require decisions based on evidence that is no longer visible. We study delayed-evidence tasks, where an early cue disappears before a later decision point, so visually similar observations can require different actions. In these settings, the current observation is not a sufficient state for control. We introduce TRAjectory-routed Causal Evidence (TRACE), a memory framework for visuomotor imitation policies. TRACE stores task-relevant visual and robot-state evidence, such as object identity, target choice, or route-dependent state, in a fixed-size latent memory that remains bounded over long episodes. Instead of indexing memory by raw time or manually provided task labels, TRACE uses path signatures: compact, order-sensitive features of the executed robot-state trajectory. These signatures do not store the visual cue itself; rather, they provide trajectory-conditioned keys for writing and retrieving the evidence stored when the cue was visible. When the robot later reaches an ambiguous observation, the policy conditions on TRACE memory to recover the missing context and choose the correct branch. TRACE attaches through lightweight adapters to policies, without changing the policy backbone, action head, or imitation objective. Across real-world long-horizon manipulation tasks with visually ambiguous branch points, TRACE improves branch selection and task success over alternative baselines, including short-history and recurrent memory. Project page: https://jeong-zju.github.io/trace
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces TRACE (TRAjectory-routed Causal Evidence), a memory framework for visuomotor imitation policies in delayed-evidence tasks. In these tasks, an early visual cue disappears before a later decision point, rendering the current observation insufficient for correct action selection. TRACE stores task-relevant evidence (object identity, target choice, route-dependent state) in a fixed-size latent memory indexed by path signatures of the executed robot-state trajectory rather than raw time or task labels. These signatures serve as trajectory-conditioned keys for writing and retrieval without storing the visual cue itself. The framework attaches via lightweight adapters to existing policies without modifying the backbone, action head, or imitation objective. Experiments on real-world long-horizon manipulation tasks with visually ambiguous branch points report improved branch selection and task success relative to short-history and recurrent memory baselines.
Significance. If the empirical results hold under rigorous evaluation, TRACE provides a practical, bounded-memory solution to state insufficiency in delayed-evidence visuomotor control. The trajectory-signature indexing mechanism is a notable technical contribution because it supplies order-sensitive, compact keys derived from robot state without requiring manual labels or unbounded storage. The adapter-based integration preserves compatibility with standard imitation-learning pipelines, which could facilitate adoption in real-world robotics settings involving long-horizon tasks with transient visual information.
major comments (2)
- [Abstract, §4] Abstract and §4 (Experiments): the abstract asserts that TRACE 'improves branch selection and task success' over baselines, yet supplies no quantitative metrics, number of trials, statistical tests, or protocol details. Without these, it is impossible to assess whether the reported gains are load-bearing for the central claim or merely suggestive.
- [§3.2] §3.2 (Path Signature Construction): the claim that path signatures provide 'effective trajectory-conditioned keys' for evidence retrieval rests on the assumption that distinct routes produce sufficiently distinct signatures. No analysis or bound is given on collision probability or sensitivity to execution noise, which is central to whether the memory mechanism functions reliably in the claimed setting.
minor comments (2)
- [§3] Notation for the path signature operator and the memory write/retrieve functions should be defined explicitly with equations rather than prose descriptions.
- [Abstract] The project page URL is given but no supplementary video or code repository is referenced; adding these would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (Experiments): the abstract asserts that TRACE 'improves branch selection and task success' over baselines, yet supplies no quantitative metrics, number of trials, statistical tests, or protocol details. Without these, it is impossible to assess whether the reported gains are load-bearing for the central claim or merely suggestive.
Authors: The abstract is written as a high-level summary per standard practice in the field, with all quantitative details (trial counts, success rates, and baseline comparisons) provided in §4. We will revise the abstract to include a brief reference to the magnitude of the reported gains to make the central claim more self-contained. revision: yes
-
Referee: [§3.2] §3.2 (Path Signature Construction): the claim that path signatures provide 'effective trajectory-conditioned keys' for evidence retrieval rests on the assumption that distinct routes produce sufficiently distinct signatures. No analysis or bound is given on collision probability or sensitivity to execution noise, which is central to whether the memory mechanism functions reliably in the claimed setting.
Authors: Path signatures are constructed via the truncated signature transform from rough path theory, which is known to separate distinct trajectories at sufficient truncation depth. Our experiments across multiple real-world tasks showed reliable retrieval with no observed collisions, supporting practical effectiveness. We will add a short discussion of empirical sensitivity to execution noise in the revised §3.2. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents TRACE as a memory attachment using path signatures of robot-state trajectories as keys for a bounded latent store of evidence. No equations, fitting procedures, or derivation steps are described that reduce a claimed result to its own inputs by construction. The mechanism is introduced as a design choice that attaches to existing policies without altering backbone or objective; no self-citation chain, uniqueness theorem, or ansatz smuggling is invoked to justify core claims. The abstract and description treat path signatures as an external, order-sensitive feature extractor rather than a fitted or self-defined quantity. This is the common case of a self-contained engineering contribution whose effectiveness is evaluated externally via task success metrics.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Path signatures are compact, order-sensitive features of robot-state trajectories that can serve as reliable keys for memory write/retrieve operations
invented entities (1)
-
TRACE memory
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Ravichandar, A
H. Ravichandar, A. S. Polydoros, S. Chernova, and A. Billard. Recent advances in robot learning from demonstration.Annual review of control, robotics, and autonomous systems, 2020
2020
-
[2]
W. Zhi, T. Lai, L. Ott, and F. Ramos. Diffeomorphic transforms for generalised imitation learning. InLearning for Dynamics and Control Conference, L4DC, 2022
2022
-
[3]
Chevyrev and A
I. Chevyrev and A. Kormilitzin. A primer on the signature method in machine learning. In Signature Methods in Finance: An Introduction with Computational Applications, pages 3–64. Springer, 2025
2025
-
[4]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware.arXiv preprint arXiv:2304.13705, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[5]
W. Zhi, T. Zhang, and M. Johnson-Roberson. Instructing robots by sketching: Learning from demonstration via probabilistic diagrammatic teaching. InIEEE International Conference on Robotics and Automation (ICRA), 2024
2024
-
[6]
Paraschos, C
A. Paraschos, C. Daniel, J. Peters, and G. Neumann. Probabilistic movement primitives. In Proceedings of the 26th International Conference on Neural Information Processing Systems, 2013
2013
-
[7]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 44(10-11):1684–1704, 2025
2025
-
[8]
W. Zhi, T. Lai, L. Ott, E. V . Bonilla, and F. Ramos. Learning efficient and robust ordinary differential equations via invertible neural networks. InInternational Conference on Machine Learning, ICML, 2022
2022
-
[9]
W. Zhi, H. Tang, T. Zhang, and M. Johnson-Roberson. Teaching periodic stable robot motion generation via sketch.IEEE Robotics and Automation Letters, 2025
2025
-
[10]
RT-1: Robotics Transformer for Real-World Control at Scale
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, J. Dabis, C. Finn, K. Gopalakrishnan, K. Haus- man, A. Herzog, J. Hsu, et al. Rt-1: Robotics transformer for real-world control at scale.arXiv preprint arXiv:2212.06817, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[11]
Zitkovich, T
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid, et al. Rt-2: Vision-language-action models transfer web knowledge to robotic control. In Conference on Robot Learning, pages 2165–2183. PMLR, 2023
2023
-
[12]
O’Neill, A
A. O’Neill, A. Rehman, A. Maddukuri, A. Gupta, A. Padalkar, A. Lee, A. Pooley, A. Gupta, A. Mandlekar, A. Jain, et al. Open X-embodiment: Robotic learning datasets and RT-X models. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6892–
-
[13]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Haus- man, B. Ichter, S. Jakubczak, T. Jones, L. Ke, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, L. X. Shi, J. Tanner, Q. Vuong, A. Walling, H. Wang, and U. Zhilinsky.π 0: A vision-language-action flow model for general robot control.arXiv preprint arXiv:2410....
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
M. Shukor, D. Aubakirova, F. Capuano, P. Kooijmans, S. Palma, A. Zouitine, M. Aractingi, C. Pascal, M. Russi, A. Marafioti, et al. Smolvla: A vision-language-action model for afford- able and efficient robotics.arXiv preprint arXiv:2506.01844, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[15]
X-VLA: Soft-Prompted Transformer as Scalable Cross-Embodiment Vision-Language-Action Model
J. Zheng, J. Li, Z. Wang, D. Liu, X. Kang, Y . Feng, Y . Zheng, J. Zou, Y . Chen, J. Zeng, et al. X- vla: Soft-prompted transformer as scalable cross-embodiment vision-language-action model. arXiv preprint arXiv:2510.10274, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
J. Bjorck, F. Casta ˜neda, N. Cherniadev, X. Da, R. Ding, L. Fan, Y . Fang, D. Fox, F. Hu, S. Huang, et al. Gr00t n1: An open foundation model for generalist humanoid robots.arXiv preprint arXiv:2503.14734, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[17]
W. Zhi, L. Ott, R. Senanayake, and F. Ramos. Continuous occupancy map fusion with fast bayesian hilbert maps. InInternational Conference on Robotics and Automation (ICRA), 2019
2019
-
[18]
W. Zhi, R. Senanayake, L. Ott, and F. Ramos. Spatiotemporal learning of directional uncer- tainty in urban environments with kernel recurrent mixture density networks.IEEE Robotics and Automation Letters, 2019
2019
-
[19]
E. Cherepanov, A. K. Kovalev, and A. I. Panov. ELMUR: External layer memory with up- date/rewrite for long-horizon RL problems.arXiv preprint arXiv:2510.07151, 2025
- [20]
- [21]
-
[22]
P. Kidger and T. Lyons. Signatory: differentiable computations of the signature and logsigna- ture transforms, on both CPU and GPU.arXiv preprint arXiv:2001.00706, 2020
-
[23]
T. Buamanee, M. Kobayashi, and Y . Uranishi. Bi-HIL: Bilateral control-based multimodal hierarchical imitation learning via subtask-level progress rate and keyframe memory for long- horizon contact-rich robotic manipulation.arXiv preprint arXiv:2603.13315, 2026
- [24]
-
[25]
M. Heo, Y . Lee, D. Lee, and J. J. Lim. Furniturebench: Reproducible real-world benchmark for long-horizon complex manipulation.The International Journal of Robotics Research, 44 (10-11):1863–1891, 2025
2025
-
[26]
O. Mees, L. Hermann, E. Rosete-Beas, and W. Burgard. Calvin: A benchmark for language- conditioned policy learning for long-horizon robot manipulation tasks.IEEE Robotics and Automation Letters, 7(3):7327–7334, 2022
2022
-
[27]
K. Cho, B. Van Merri¨enboer, C ¸ . Gulc ¸ehre, D. Bahdanau, F. Bougares, H. Schwenk, and Y . Ben- gio. Learning phrase representations using rnn encoder–decoder for statistical machine trans- lation. InProceedings of the 2014 conference on empirical methods in natural language pro- cessing (EMNLP), pages 1724–1734, 2014
2014
-
[28]
Vaswani, N
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polo- sukhin. Attention is all you need.Advances in neural information processing systems, 30, 2017
2017
-
[29]
Santoro, S
A. Santoro, S. Bartunov, M. Botvinick, D. Wierstra, and T. Lillicrap. Meta-learning with memory-augmented neural networks. InInternational conference on machine learning, pages 1842–1850. PMLR, 2016. 10 A Technical Appendix This appendix collects the technical material that supports the main text. The subsections follow the paper narrative. They define th...
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.