Ask the World Before Acting: Budgeted Environment Probing for World-Model Calibration
Pith reviewed 2026-07-01 05:56 UTC · model grok-4.3
The pith
Budgeted environment probes before task actions reduce terminal world-model error in language agents when the probe policy follows task structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper introduces a budgeted probing operator for structured belief tables. Controlled experiments establish that mid-planning environment evidence reduces terminal world-model error when the probe policy follows the structure of the task.
What carries the argument
The budgeted probing operator for structured belief tables, which formalizes a type-stratified probe-action frontier that identifies useful probes by belief type and location.
Load-bearing premise
The agent's own confidence is a poor guide for spatial beliefs when the world changes off-screen, and a type-stratified probe policy can be implemented without disrupting task progress.
What would settle it
An experiment that applies a non-type-stratified probe policy and measures no reduction in terminal world-model error would show that structure alignment is not what drives the benefit.
Figures
read the original abstract
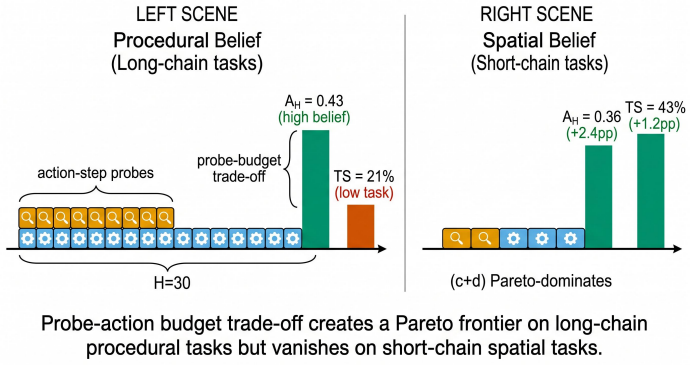
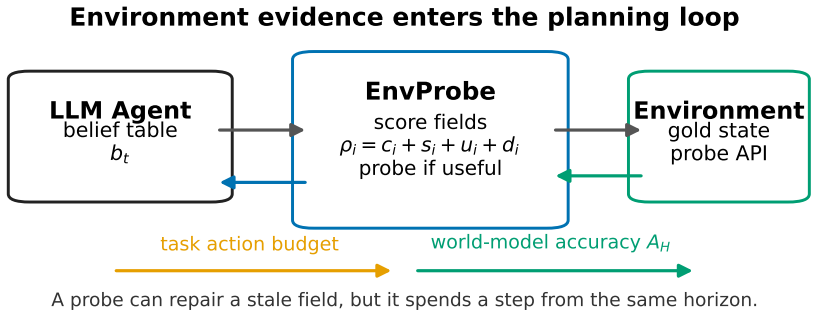
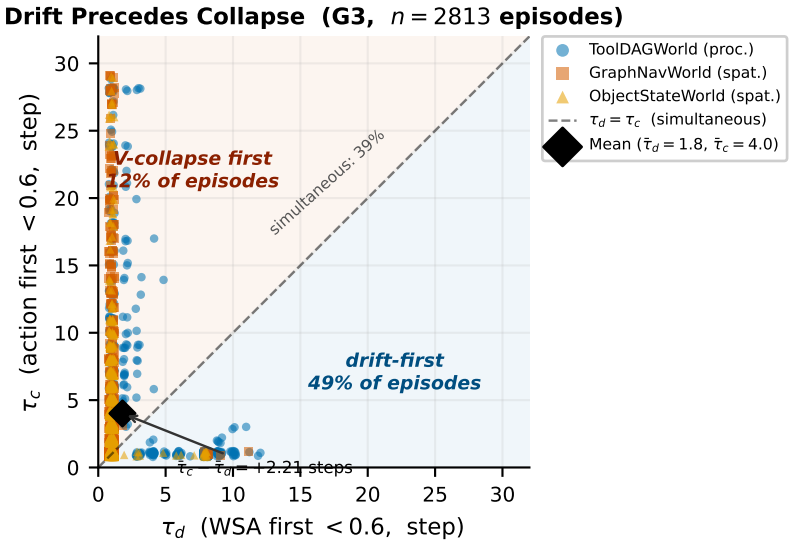
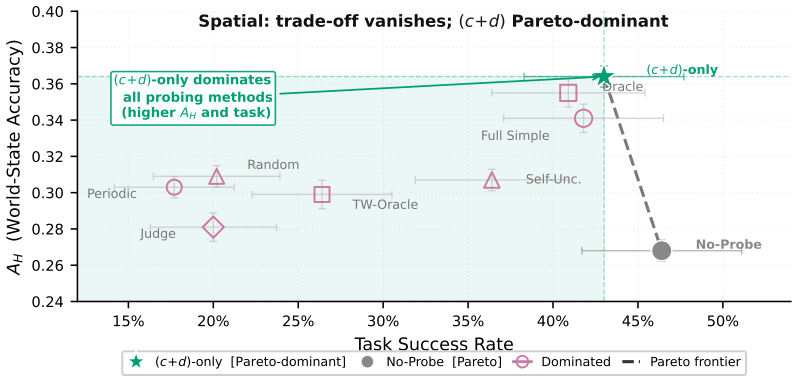
Long-horizon language agents do not only choose actions; they carry a private model of the world from one decision to the next. When that model drifts, a later failure can be decided before the failing action is ever taken. We study a direct repair mechanism: before committing to the next task action, an agent may ask the environment about one belief field and write the answer back into its world model. This makes environment interaction a scarce calibration resource, not merely a way to advance the task. We introduce \method, a budgeted probing operator for structured belief tables. The useful probes are not the same everywhere. Procedural beliefs, such as tool dependencies, can often be repaired by targeted checks, but those checks spend steps that the task may need. Spatial beliefs, such as object locations and graph edges, rely more on structural cues; the agent's own confidence can be a poor guide when the world changes off-screen. A type-stratified analysis formalizes this probe-action frontier, and controlled experiments show that mid-planning environment evidence reduces terminal world-model error when the probe policy follows the structure of the task.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces exttt{BUDGETED PROBING} ( exttt{BP}), a budgeted operator that lets long-horizon language agents query one belief field from the environment before committing to a task action and write the result back into a structured world model. It distinguishes procedural beliefs (repairable by targeted checks) from spatial beliefs (where agent confidence is a poor guide when changes occur off-screen), formalizes a type-stratified probe-action frontier, and reports that controlled experiments show reduced terminal world-model error precisely when the probe policy follows task structure.
Significance. If the central empirical claim holds under autonomous implementation, the work supplies a concrete mechanism for treating environment steps as a scarce calibration resource rather than solely task progress, with a type-aware analysis that could inform more reliable long-horizon agents.
major comments (2)
- [Abstract / §4] Abstract and §4 (type-stratified analysis): the claim that a type-stratified probe policy reduces terminal error presupposes that belief types (procedural vs. spatial) and appropriate probe locations can be identified from agent-internal signals without external supervision or oracle task metadata. If experiments assign types using ground-truth metadata, the reported gain does not demonstrate that an autonomous budgeted operator achieves the same reduction.
- [Experiments] Experiments section: the abstract states that mid-planning probes reduce error when the policy follows task structure, yet no baselines, error bars, data-exclusion rules, or ablation on oracle vs. internal type identification are referenced. Without these, it is impossible to assess whether the data support the load-bearing claim that structured probing outperforms unstructured or no-probe controls.
minor comments (2)
- [§3] Notation for the belief table and probe operator is introduced without an explicit equation or pseudocode block; a compact definition would clarify the budgeted constraint.
- [§2] The distinction between procedural and spatial beliefs is stated qualitatively; a short table mapping example beliefs to type and repair cost would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on autonomy of type identification and experimental rigor. We address each major point below and will revise the manuscript to incorporate the requested clarifications and additional analyses.
read point-by-point responses
-
Referee: [Abstract / §4] Abstract and §4 (type-stratified analysis): the claim that a type-stratified probe policy reduces terminal error presupposes that belief types (procedural vs. spatial) and appropriate probe locations can be identified from agent-internal signals without external supervision or oracle task metadata. If experiments assign types using ground-truth metadata, the reported gain does not demonstrate that an autonomous budgeted operator achieves the same reduction.
Authors: We agree that the current type-stratified analysis relies on ground-truth task metadata to label belief types and select structured probe locations. This design isolates the benefit of following task structure but does not demonstrate that equivalent gains are possible from purely internal signals. In the revision we will explicitly note this limitation in §4 and add an ablation that substitutes the oracle type assignment with a simple internal heuristic (belief entropy combined with time since last update). Terminal world-model error will be reported for both the oracle and internal variants to quantify the autonomy gap. revision: yes
-
Referee: [Experiments] Experiments section: the abstract states that mid-planning probes reduce error when the policy follows task structure, yet no baselines, error bars, data-exclusion rules, or ablation on oracle vs. internal type identification are referenced. Without these, it is impossible to assess whether the data support the load-bearing claim that structured probing outperforms unstructured or no-probe controls.
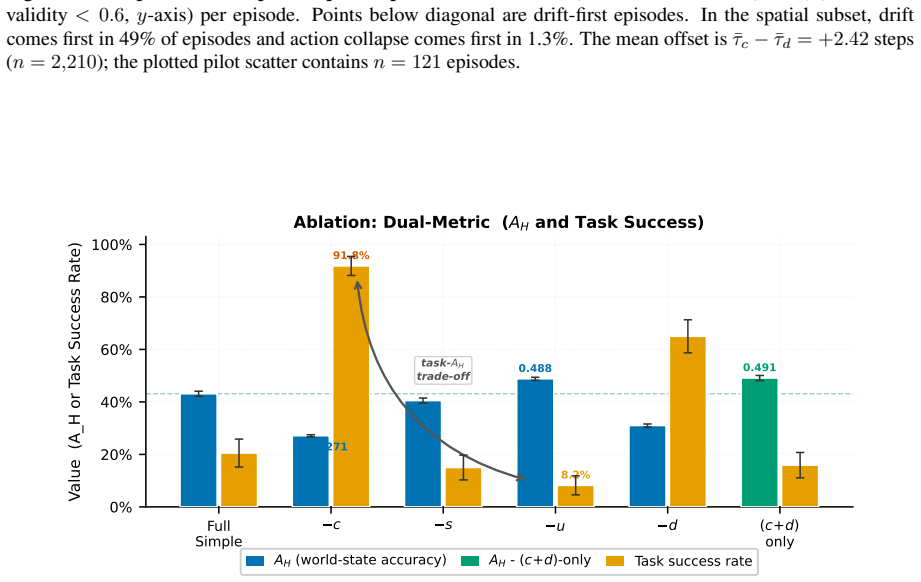
Authors: The referee is correct that these details were not sufficiently documented. The original experiments did include no-probe and random-probe controls, were run with 30 random seeds, and applied a fixed data-exclusion rule (discard episodes that timed out). These elements will be added to the Experiments section together with the oracle-vs-internal ablation described above. Mean terminal error ± one standard deviation will be reported for all conditions, enabling direct assessment of the central claim. revision: yes
Circularity Check
No circularity: claims rest on experiments, not self-definition or fitted inputs
full rationale
The abstract and description contain no equations, parameter fits, or derivations that could reduce to their own inputs by construction. The central claim (mid-planning probes reduce terminal error when policy follows task structure) is presented as an empirical result from controlled experiments rather than a mathematical identity or self-citation chain. No self-definitional loops, uniqueness theorems, or ansatzes are visible. The type-stratified analysis is described as formalizing an observed frontier, not as presupposing the result. This is the normal case of a self-contained empirical paper with no detectable circularity in its reported chain.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Uncertainty of Thoughts: Uncertainty-Aware Planning Enhances Information Seeking in
Zhiyuan Hu and Chumin Liu and Xidong Feng and Yilun Zhao and See-Kiong Ng and Anh Tuan Luu and Junxian He and Pang Wei Koh and Bryan Hooi , booktitle =. Uncertainty of Thoughts: Uncertainty-Aware Planning Enhances Information Seeking in. 2024 , eprint =
2024
-
[2]
arXiv preprint arXiv:2510.01531 , year =
Information Seeking for Robust Decision Making under Partial Observability , author =. arXiv preprint arXiv:2510.01531 , year =. 2510.01531 , archivePrefix =
-
[3]
2026 , eprint =
Xingkun Yin and Hongyang Du , journal =. 2026 , eprint =
2026
-
[4]
2026 , eprint=
RPMS: Enhancing LLM-Based Embodied Planning through Rule-Augmented Memory Synergy , author=. 2026 , eprint=
2026
-
[5]
2024 , eprint =
Vardhan Dongre and Xiaocheng Yang and Emre Can Acikgoz and Suvodip Dey and Gokhan Tur and Dilek Hakkani-Tur , journal =. 2024 , eprint =
2024
-
[6]
Narasimhan and Yuan Cao , booktitle =
Shunyu Yao and Jeffrey Zhao and Dian Yu and Nan Du and Izhak Shafran and Karthik R. Narasimhan and Yuan Cao , booktitle =. 2023 , eprint =
2023
-
[7]
Reflexion: Language Agents with Verbal Reinforcement Learning
Reflexion: Language Agents with Verbal Reinforcement Learning , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =. 2303.11366 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Inner Monologue: Embodied Reasoning through Planning with Language Models
Inner Monologue: Embodied Reasoning through Planning with Language Models , author =. Conference on Robot Learning (CoRL) , year =. 2207.05608 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances , author =. arXiv preprint arXiv:2204.01691 , year =. 2204.01691 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
Reasoning with Language Model is Planning with World Model
Reasoning with Language Model is Planning with World Model , author =. Proceedings of the 2023 Conference on Empirical Methods in Natural Language Processing (EMNLP) , year =. 2305.14992 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[11]
Language Agent Tree Search Unifies Reasoning Acting and Planning in Language Models
Language Agent Tree Search Unifies Reasoning Acting and Planning in Language Models , author =. International Conference on Machine Learning (ICML) , year =. 2310.04406 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[12]
Toolformer: Language Models Can Teach Themselves to Use Tools
Toolformer: Language Models Can Teach Themselves to Use Tools , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =. 2302.04761 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[13]
2024 , eprint =
Yujia Qin and Shihao Liang and Yining Ye and Kunliang Zhu and Lan Yan and Yaxi Lu and Yankai Lin and Xin Cong and Xiangru Tang and Bill Qian and Sihan Zhao and Lauren Hong and Runchu Tian and Ruobing Xie and Jie Zhou and Mark Gerstein and Dahai Li and Zhiyuan Liu and Maosong Sun , booktitle =. 2024 , eprint =
2024
-
[14]
2024 , eprint =
Quan Yuan and Mehran Kazemi and Xin Xu and Isaac Noble and Vaiva Imbrasaite and Deepak Ramachandran , booktitle =. 2024 , eprint =
2024
-
[15]
2021 , eprint =
Mohit Shridhar and Xingdi Yuan and Marc-Alexandre Côté and Yonatan Bisk and Adam Trischler and Matthew Hausknecht , booktitle =. 2021 , eprint =
2021
-
[16]
Xu and Hao Zhu and Xuhui Zhou and Robert Lo and Abishek Sridhar and Xianyi Cheng and Tianyue Ou and Yonatan Bisk and Daniel Fried and Uri Alon and Graham Neubig , booktitle =
Shuyan Zhou and Frank F. Xu and Hao Zhu and Xuhui Zhou and Robert Lo and Abishek Sridhar and Xianyi Cheng and Tianyue Ou and Yonatan Bisk and Daniel Fried and Uri Alon and Graham Neubig , booktitle =. 2024 , eprint =
2024
-
[17]
2023 , eprint =
Xiang Deng and Yu Gu and Boyuan Zheng and Shijie Chen and Samuel Stevens and Boshi Wang and Huan Sun and Yu Su , booktitle =. 2023 , eprint =
2023
-
[18]
2024 , eprint =
Jing Yu Koh and Robert Lo and Lawrence Jang and Vikram Duvvur and Ming Chong Lim and Po-Yu Huang and Graham Neubig and Shuyan Zhou and Ruslan Salakhutdinov and Daniel Fried , journal =. 2024 , eprint =
2024
-
[19]
2023 , eprint =
Xiao Liu and Hao Yu and Hanchen Zhang and Yifan Xu and Xuanyu Lei and Hanyu Lai and Yu Gu and Hangliang Ding and Kaiwen Men and Kejuan Yang and Shudan Zhang and Xiang Deng and Aohan Zeng and Zhengxiao Du and Chenhui Zhang and Sheng Shen and Tianjun Zhang and Yu Su and Huan Sun and Minlie Huang and Yuxiao Dong and Jie Tang , journal =. 2023 , eprint =
2023
-
[20]
Voyager: An Open-Ended Embodied Agent with Large Language Models
Voyager: An Open-Ended Embodied Agent with Large Language Models , author =. Transactions on Machine Learning Research (TMLR) , year =. 2305.16291 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[21]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Long-Horizon Planning for Multi-Agent Robots in Partially Observable Environments , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =. 2407.10031 , archivePrefix =
-
[22]
Describe, Explain, Plan and Select: Interactive Planning with Large Language Models Enables Open-World Multi-Task Agents , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =. 2302.01560 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Why Reasoning Fails to Plan: A Planning-Centric Analysis of Long-Horizon Decision Making in
Zehong Wang and Fang Wu and Hongru Wang and Xiangru Tang and Bolian Li and Zhenfei Yin , journal =. Why Reasoning Fails to Plan: A Planning-Centric Analysis of Long-Horizon Decision Making in. 2026 , eprint =
2026
-
[24]
2025 , eprint =
Haotian Luo and Huaisong Zhang and Xuelin Zhang and Haoyu Wang and Zeyu Qin and Wenjie Lu and others , journal =. 2025 , eprint =
2025
-
[25]
Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing (EMNLP) , pages =
Ruoyao Wang and Peter Jansen and Marc-Alexandre C. Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing (EMNLP) , pages =. 2022 , eprint =
2022
-
[26]
Proceedings of the 17th Annual International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =
A Sequential Algorithm for Training Text Classifiers , author =. Proceedings of the 17th Annual International ACM SIGIR Conference on Research and Development in Information Retrieval , pages =. 1994 , doi =
1994
-
[27]
2009 , url =
Active Learning Literature Survey , author =. 2009 , url =
2009
-
[28]
1994 , doi =
An Introduction to the Bootstrap , author =. 1994 , doi =
1994
-
[29]
2024 , howpublished =
2024
-
[30]
Nemhauser, George L. and Wolsey, Laurence A. and Fisher, Marshall L. , journal =. An Analysis of Approximations for Maximizing Submodular Set Functions---. 1978 , publisher =. doi:10.1007/BF01588971 , note =
-
[31]
2017 , publisher =
Markov Chains and Mixing Times , author =. 2017 , publisher =
2017
-
[32]
1961 , publisher =
Transmission of Information: A Statistical Theory of Communications , author =. 1961 , publisher =
1961
-
[33]
Surveys in Combinatorics, 1989 , editor =
On the Method of Bounded Differences , author =. Surveys in Combinatorics, 1989 , editor =. 1989 , publisher =. doi:10.1017/CBO9781107359949.008 , note =
-
[34]
Annals of Mathematical Statistics , volume =
A Class of Statistics with Asymptotically Normal Distribution , author =. Annals of Mathematical Statistics , volume =. 1948 , publisher =. doi:10.1214/aoms/1177730196 , note =
-
[35]
Artificial Intelligence , volume =
Planning and Acting in Partially Observable Stochastic Domains , author =. Artificial Intelligence , volume =. 1998 , doi =
1998
-
[36]
Online Planning Algorithms for
St. Online Planning Algorithms for. Journal of Artificial Intelligence Research , volume =. 2008 , doi =
2008
-
[37]
Statistical Science , volume =
Bayesian Experimental Design: A Review , author =. Statistical Science , volume =. 1995 , doi =
1995
-
[38]
Adaptive Submodularity: Theory and Applications in Active Learning and Stochastic Optimization
Adaptive Submodularity: Theory and Applications in Active Learning and Stochastic Optimization , author =. Journal of Artificial Intelligence Research , volume =. 2011 , doi =. 1003.3967 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[39]
Proceedings of the 34th International Conference on Machine Learning (ICML) , pages =
On Calibration of Modern Neural Networks , author =. Proceedings of the 34th International Conference on Machine Learning (ICML) , pages =. 2017 , eprint =
2017
-
[40]
Language Models (Mostly) Know What They Know
Language Models (Mostly) Know What They Know , author =. arXiv preprint arXiv:2207.05221 , year =. 2207.05221 , archivePrefix =
work page internal anchor Pith review Pith/arXiv arXiv
-
[41]
Tractability: Practical Approaches to Hard Problems , editor =
Andreas Krause and Daniel Golovin , title =. Tractability: Practical Approaches to Hard Problems , editor =. 2014 , pages =
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.