THREAD: Trajectory Planning for Hybrid Rigid-Soft Manipulators with Environment-Aware Diffusion
Pith reviewed 2026-06-26 13:49 UTC · model grok-4.3
The pith
THREAD uses a diffusion model to generate collision-free trajectories for hybrid rigid-soft robots that thread through narrow apertures.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
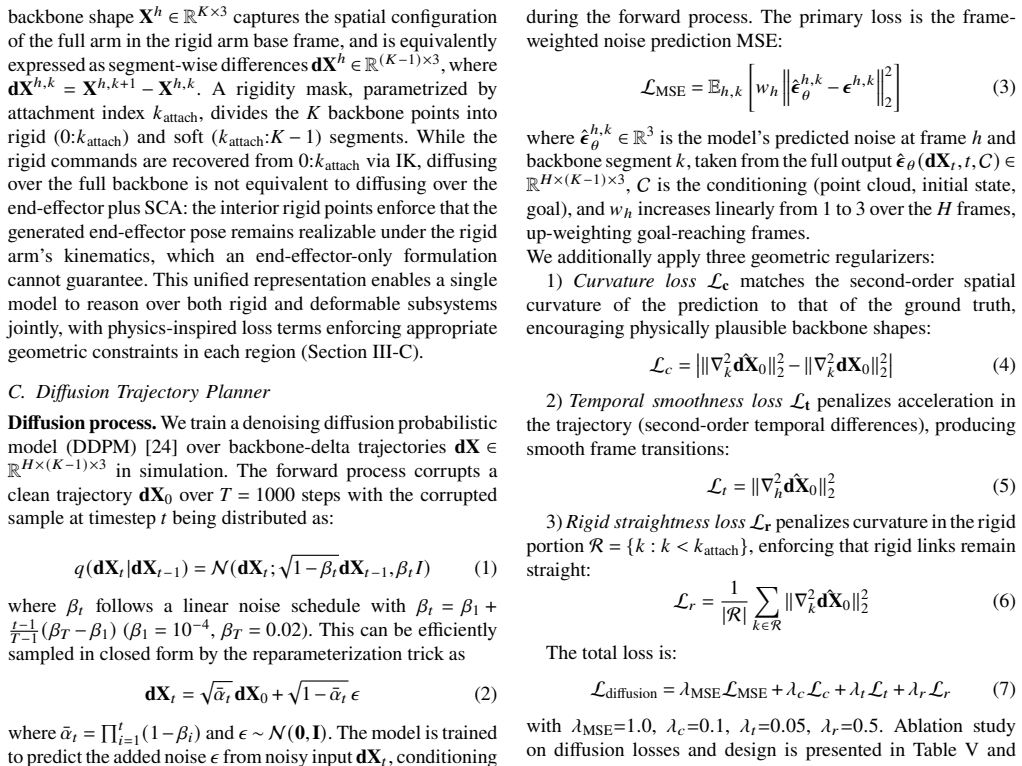
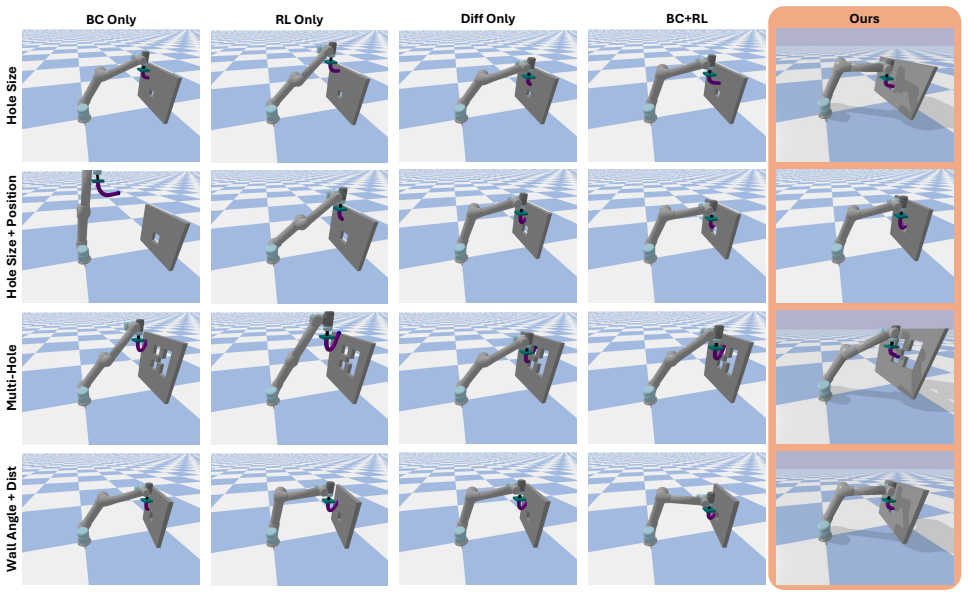
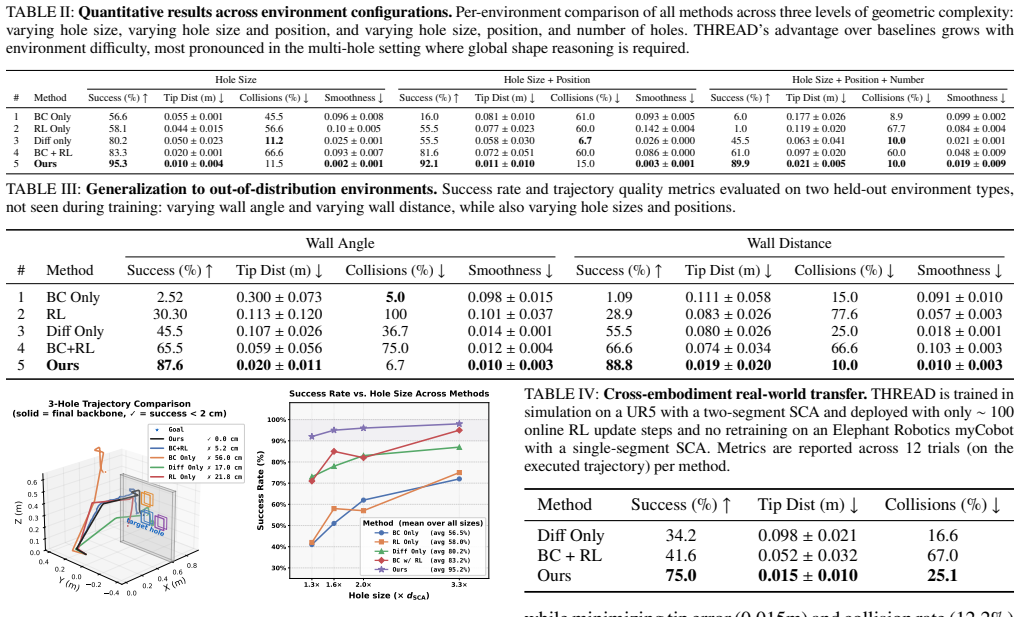
THREAD learns a generative prior over physically realizable backbone trajectories for hybrid manipulators, conditioned on local environment geometry, and encodes curvature, smoothness, and collision constraints jointly across rigid and soft segments using physics-inspired losses; trained only in simulation, it reaches 92.4 percent task success with five times fewer collisions than the strongest baseline and transfers to real hardware across embodiments with minimal online updates to thread apertures as small as 1.3 times the soft segment diameter.
What carries the argument
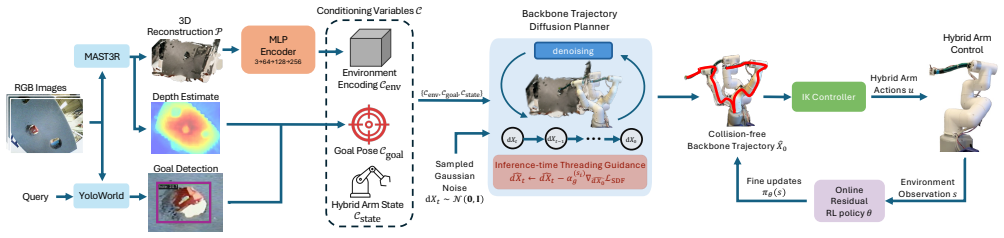
Environment-aware diffusion model that generates full backbone trajectories conditioned on local geometry while jointly enforcing physics-inspired losses on curvature, smoothness, and collisions across rigid and soft segments.
If this is right
- Hybrid manipulators can successfully thread apertures only 1.3 times the soft segment diameter.
- Cross-embodiment transfer succeeds with only minimal online updates after simulation training.
- Task success reaches 92.4 percent while cutting collisions by a factor of five relative to prior methods.
- Planning rigid and soft segments jointly under shared geometric conditioning avoids independent-segment infeasibility.
- Physics-inspired losses during diffusion training enforce curvature and smoothness constraints that hold under environmental contact.
Where Pith is reading between the lines
- The same conditioning mechanism could extend to dynamic environments if local geometry is updated from real-time sensing.
- Reducing reliance on extensive real-world data collection for confined-space tasks may become feasible for other hybrid robot designs.
- Similar diffusion priors might apply to non-manipulation tasks such as inspection or navigation in cluttered tubes or pipes.
- The joint loss formulation could generalize to additional constraints like force limits or energy efficiency if added to the training objective.
Load-bearing premise
A generative prior learned in simulation will produce trajectories that stay physically realizable under real contact forces and kinematic coupling when only minimal online updates are applied.
What would settle it
Real-world deployment where THREAD trajectories cause frequent collisions or require large online corrections when the physical environment introduces contact forces or kinematic couplings absent from the simulation training distribution.
Figures
read the original abstract
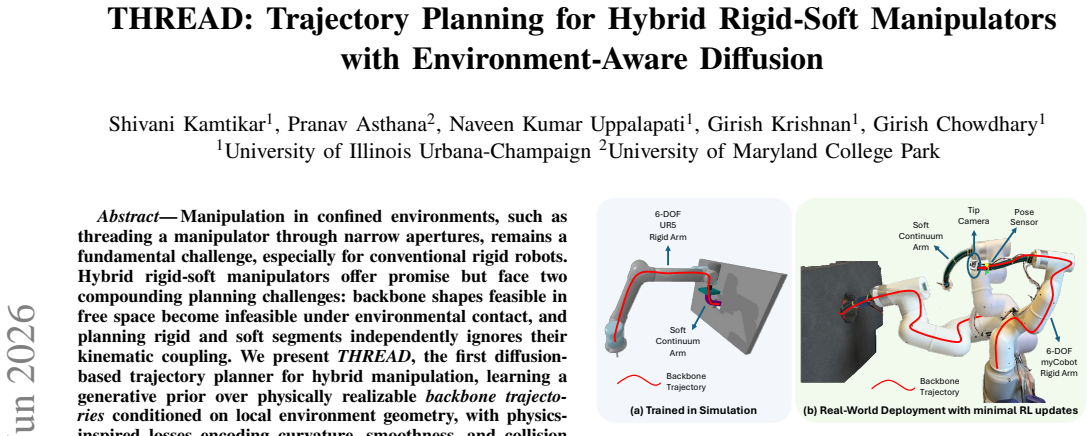
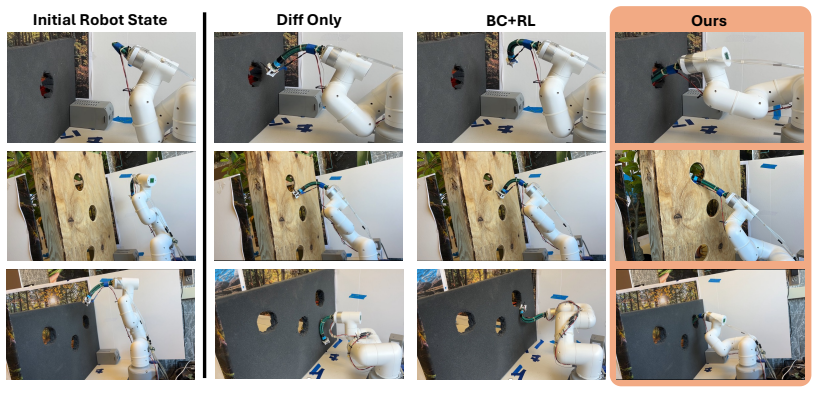
Manipulation in confined environments, such as threading a manipulator through narrow apertures, remains a fundamental challenge, especially for conventional rigid robots. Hybrid rigid-soft manipulators offer promise but face two compounding planning challenges: backbone shapes feasible in free space become infeasible under environmental contact, and planning rigid and soft segments independently ignores their kinematic coupling. We present THREAD, the first diffusion-based trajectory planner for hybrid manipulation, learning a generative prior over physically realizable backbone trajectories conditioned on local environment geometry, with physics-inspired losses encoding curvature, smoothness, and collision constraints jointly across both segments. Trained in simulation, THREAD achieves 92.4% task success with 5x fewer collisions than the strongest baseline. We show cross-embodiment real-world transfer with minimal online updates, successfully threading through apertures as small as 1.3x the soft segment diameter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents THREAD, the first diffusion-based trajectory planner for hybrid rigid-soft manipulators. It learns a generative prior over physically realizable backbone trajectories conditioned on local environment geometry, with physics-inspired losses encoding curvature, smoothness, and collision constraints jointly across rigid and soft segments. Trained in simulation, it reports 92.4% task success with 5x fewer collisions than the strongest baseline. It further claims cross-embodiment real-world transfer with minimal online updates, successfully threading through apertures as small as 1.3x the soft segment diameter.
Significance. If substantiated, the work could advance planning methods for hybrid manipulators in confined environments by jointly handling environmental contact and kinematic coupling via an environment-aware diffusion prior. The combination of generative modeling with physics-inspired losses is a promising direction, but the significance hinges on whether the simulation-to-real transfer holds under unmodeled dynamics.
major comments (2)
- [Abstract] Abstract: The central real-world transfer claim is load-bearing but unsupported by quantitative evidence. The abstract quantifies only simulation results (92.4% success, 5x collision reduction) while describing real-world threading only qualitatively, with no reported success rates, collision counts, or characterization of the 'minimal online updates' (e.g., gradient steps, updated parameters, or handling of friction/hysteresis). This directly undermines assessment of whether the sim-trained prior remains physically realizable under real contact and coupling.
- [Abstract] Abstract: No derivation details, loss formulations, dataset statistics, or ablation tables are provided, preventing verification of whether the reported performance stems from the claimed physics-inspired losses or from other factors. This is load-bearing for the claim that the generative prior produces feasible trajectories.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of how the abstract presents our contributions. We respond to each major comment below and indicate where revisions to the abstract will be made in the next version of the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central real-world transfer claim is load-bearing but unsupported by quantitative evidence. The abstract quantifies only simulation results (92.4% success, 5x collision reduction) while describing real-world threading only qualitatively, with no reported success rates, collision counts, or characterization of the 'minimal online updates' (e.g., gradient steps, updated parameters, or handling of friction/hysteresis). This directly undermines assessment of whether the sim-trained prior remains physically realizable under real contact and coupling.
Authors: We agree that the abstract would benefit from quantitative real-world metrics to better substantiate the transfer claim. In the revised manuscript, we will incorporate specific real-world performance numbers (success rate, collision statistics, and details on the online updates such as gradient steps) into the abstract while respecting length limits. This change directly addresses the concern about assessing physical realizability. revision: yes
-
Referee: [Abstract] Abstract: No derivation details, loss formulations, dataset statistics, or ablation tables are provided, preventing verification of whether the reported performance stems from the claimed physics-inspired losses or from other factors. This is load-bearing for the claim that the generative prior produces feasible trajectories.
Authors: Abstracts are inherently concise summaries and do not contain full derivations or tables; those elements appear in the main text (loss formulations and physics-inspired terms in Section 3, dataset statistics in Section 4, and ablations in Section 5). To improve the abstract's self-contained nature, we will add a brief clause highlighting the joint curvature, smoothness, and collision losses. Full verification remains possible via the manuscript body. revision: partial
Circularity Check
No circularity detected; claims rest on empirical simulation and transfer results
full rationale
The abstract and provided text describe a diffusion model trained in simulation using physics-inspired losses for curvature, smoothness, and collision constraints, followed by reported success rates and real-world transfer. No equations, parameter-fitting procedures, self-definitional steps, or load-bearing self-citations are visible that would reduce any prediction or result to its inputs by construction. The method is presented as self-contained against external benchmarks (sim success, collision counts, real-world threading), with no derivation chain that collapses into renaming, ansatz smuggling, or fitted-input-as-prediction patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A soft robot that navigates its environment through growth,
E. W. Hawkes, L. H. Blumenschein, J. D. Greer, and A. M. Okamura, “A soft robot that navigates its environment through growth,”Science Robotics, vol. 2, no. 8, p. eaan3028, 2017
2017
-
[2]
Valens: Design of a novel variable length nested soft arm,
N. K. Uppalapati and G. Krishnan, “Valens: Design of a novel variable length nested soft arm,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1135–1142, 2020
2020
-
[3]
Hybrid visual servoing control of a soft robot with compliant obstacle avoidance,
F. Xu, X. Kang, and H. Wang, “Hybrid visual servoing control of a soft robot with compliant obstacle avoidance,”IEEE/ASME Transactions on Mechatronics, 2024
2024
-
[4]
Learning-based position and orientation control of a hybrid rigid-soft arm manipulator,
K. Koe, S. Marri, B. Walt, S. Kamtikar, N. K. Uppalapati, G. Krishnan, and G. Chowdhary, “Learning-based position and orientation control of a hybrid rigid-soft arm manipulator,”Journal of Mechanisms and Robotics, vol. 17, no. 7, p. 071010, 2025
2025
-
[5]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y. Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, vol. 44, no. 10-11, pp. 1684–1704, 2025
2025
-
[6]
Diffusion models for robotic manipulation: A survey,
R. Wolf, Y. Shi, S. Liu, and R. Rayyes, “Diffusion models for robotic manipulation: A survey,”Frontiers in Robotics and AI, vol. 12, p. 1606247, 2025
2025
-
[7]
Softmanisim: A fast simulation framework for multi-segment continuum manipulators tailored for robot learning,
M. Kasaei, H. Kasaei, and M. Khadem, “Softmanisim: A fast simulation framework for multi-segment continuum manipulators tailored for robot learning,” in8th Annual Conference on Robot Learning
-
[8]
Planning with diffu- sion for flexible behavior synthesis,
M. Janner, Y. Du, J. B. Tenenbaum, and S. Levine, “Planning with diffu- sion for flexible behavior synthesis,”arXiv preprint arXiv:2205.09991, 2022
Pith/arXiv arXiv 2022
-
[9]
Motion planning diffusion: Learning and planning of robot motions with diffusion models,
J. Carvalho, A. T. Le, M. Baierl, D. Koert, and J. Peters, “Motion planning diffusion: Learning and planning of robot motions with diffusion models,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 1916–1923
2023
-
[10]
Fault-tolerant path planning for cable-driven manipulators based on a diffusion strategy,
D. Hu, D. Xu, H. R. Karimi, Q. Wang, Y. Wang, H. Zhang, Q. Li, and Y. Zhai, “Fault-tolerant path planning for cable-driven manipulators based on a diffusion strategy,”Mechanical Systems and Signal Process- ing, vol. 244, p. 113840, 2026
2026
-
[11]
Diffusebot: Breeding soft robots with physics-augmented generative diffusion models,
T.-H. J. Wang, J. Zheng, P. Ma, Y. Du, B. Kim, A. Spielberg, J. Tenenbaum, C. Gan, and D. Rus, “Diffusebot: Breeding soft robots with physics-augmented generative diffusion models,”Advances in Neural Information Processing Systems, vol. 36, pp. 44 398–44 423, 2023
2023
-
[12]
Grounding image matching in 3d with mast3r,
V. Leroy, Y. Cabon, and J. Revaud, “Grounding image matching in 3d with mast3r,” inEuropean conference on computer vision. Springer, 2024, pp. 71–91
2024
-
[13]
Yolo- world: Real-time open-vocabulary object detection,
T. Cheng, L. Song, Y. Ge, W. Liu, X. Wang, and Y. Shan, “Yolo- world: Real-time open-vocabulary object detection,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 16 901–16 911
2024
-
[14]
S-rrt*-based obstacle avoidance autonomous motion planner for continuum-rigid manipulator,
Y. Li, T. Miyazaki, Y. Yamamoto, and K. Kawashima, “S-rrt*-based obstacle avoidance autonomous motion planner for continuum-rigid manipulator,”arXiv preprint arXiv:2409.19110, 2024
arXiv 2024
-
[15]
Continuum robots: An overview,
M. Russo, S. M. H. Sadati, X. Dong, A. Mohammad, I. D. Walker, C. Bergeles, K. Xu, and D. A. Axinte, “Continuum robots: An overview,” Advanced Intelligent Systems, vol. 5, no. 5, p. 2200367, 2023
2023
-
[16]
Visual servoing for pose control of soft continuum arm in a structured environment,
S. Kamtikar, S. Marri, B. Walt, N. K. Uppalapati, G. Krishnan, and G. Chowdhary, “Visual servoing for pose control of soft continuum arm in a structured environment,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5504–5511, 2022
2022
-
[17]
Hyreach: Vision-guided hybrid manipulator reaching in cluttered unseen environments,
S. Kamtikar, K. Koe, J. Wasserman, S. Marri, B. Walt, N. K. Uppalapati, G. Krishnan, and G. Chowdhary, “Hyreach: Vision-guided hybrid manipulator reaching in cluttered unseen environments,”Soft Robotics, p. 21695172261439479, 2026
2026
-
[18]
A comparison of model-free controllers for trajectory tracking in a plant-inspired soft arm,
M. S. Nazeer, Y. T. Ansari, E. Falotico, and C. Laschi, “A comparison of model-free controllers for trajectory tracking in a plant-inspired soft arm,” inConference on Biomimetic and Biohybrid Systems. Springer, 2024, pp. 208–220
2024
-
[19]
Rl-based adaptive controller for high precision reaching in a soft robot arm,
M. S. Nazeer, C. Laschi, and E. Falotico, “Rl-based adaptive controller for high precision reaching in a soft robot arm,”IEEE Transactions on Robotics, vol. 40, pp. 2498–2512, 2024
2024
-
[20]
Hysteresis-aware neural network modeling and whole- body reinforcement learning control of soft robots,
Z. Chen, Y. Xia, J. Liu, J. Liu, W. Tang, J. Chen, F. Gao, L. Ma, H. Liao, Y. Wanget al., “Hysteresis-aware neural network modeling and whole- body reinforcement learning control of soft robots,”IEEE Robotics and Automation Letters, 2025
2025
-
[21]
A modeling and data-driven control framework for rigid-soft hybrid robot with visual servoing,
S. He, L. Sun, Y. Xu, and D. Li, “A modeling and data-driven control framework for rigid-soft hybrid robot with visual servoing,”IEEE Robotics and Automation Letters, 2023
2023
-
[22]
Position and orientation control for hyper-elastic multi-segment continuum robots,
J. Shi, S. Abad Guaman, J. Dai, and H. Wurdemann, “Position and orientation control for hyper-elastic multi-segment continuum robots,” IEEE/ASME Transactions on Mechatronics, 2023
2023
-
[23]
Physics-informed neural networks for continuum robots: Towards fast approximation of static cosserat rod theory,
M. Bensch, T.-D. Job, T.-L. Habich, T. Seel, and M. Schappler, “Physics-informed neural networks for continuum robots: Towards fast approximation of static cosserat rod theory,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 17 293–17 299
2024
-
[24]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” Advances in neural information processing systems, vol. 33, pp. 6840– 6851, 2020
2020
-
[25]
G. Tevet, S. Raab, B. Gordon, Y. Shafir, D. Cohen-Or, and A. H. Bermano, “Human motion diffusion model,”arXiv preprint arXiv:2209.14916, 2022
Pith/arXiv arXiv 2022
-
[26]
Bert: Pre-training of deep bidirectional transformers for language understanding,
J. Devlin, M.-W. Chang, K. Lee, and K. Toutanova, “Bert: Pre-training of deep bidirectional transformers for language understanding,” in Proceedings of the 2019 conference of the North American chapter of the association for computational linguistics: human language technologies, volume 1 (long and short papers), 2019, pp. 4171–4186
2019
-
[27]
Denoising diffusion implicit models,
J. Song, C. Meng, and S. Ermon, “Denoising diffusion implicit models,” inInternational Conference on Learning Representations
-
[28]
How to model tendon-driven continuum robots and benchmark modelling perfor- mance,
P. Rao, Q. Peyron, S. Lilge, and J. Burgner-Kahrs, “How to model tendon-driven continuum robots and benchmark modelling perfor- mance,”Frontiers in Robotics and AI, vol. 7, p. 630245, 2021
2021
-
[29]
Stable-baselines3: Reliable reinforcement learning implementations,
A. Raffin, A. Hill, A. Gleave, A. Kanervisto, M. Ernestus, and N. Dormann, “Stable-baselines3: Reliable reinforcement learning implementations,”Journal of Machine Learning Research, vol. 22, no. 268, pp. 1–8, 2021. [Online]. Available: http://jmlr.org/papers/v22/ 20-1364.html
2021
-
[30]
Towards pneumatic spiral grippers: Modeling and design considerations,
N. K. Uppalapati and G. Krishnan, “Towards pneumatic spiral grippers: Modeling and design considerations,”Soft robotics, vol. 5, no. 6, pp. 695–709, 2018
2018
-
[31]
Soft dagger: Sample-efficient imitation learning for control of soft robots,
M. S. Nazeer, C. Laschi, and E. Falotico, “Soft dagger: Sample-efficient imitation learning for control of soft robots,”Sensors, vol. 23, no. 19, p. 8278, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.