REVIEW 2 major objections 1 minor 73 references
RadarSim generates sharper Doppler radar range images by initializing a neural field from camera data instead of radar alone.
Reviewed by Pith at T0; open to challenge. T0 means a machine referee read the full paper against a public rubric. the ladder, T0–T4 →
T0 review · grok-4.3
2026-06-29 22:15 UTC pith:FP5DB343
load-bearing objection RadarSim uses camera data to initialize neural fields for radar simulation, which is a practical step but the abstract gives no numbers to check if it actually works. the 2 major comments →
RadarSim: Simulating Single-Chip Radar via Multimodal Neural Fields
The pith
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
RadarSim is a unified differentiable renderer which leverages the high angular resolution of RGB cameras to generate Doppler radar range images from a camera-initialized neural field. On a custom dataset of calibrated radar-camera recordings, this produces sharper geometry and Doppler range frames than radar-only reconstructions.
What carries the argument
A camera-initialized neural field that acts as the shared scene representation inside a unified differentiable renderer for Doppler radar outputs.
Load-bearing premise
Camera data can initialize a neural field that accurately encodes the geometry and motion details that radar would observe, without a large mismatch between the two sensor domains.
What would settle it
A side-by-side evaluation on the collected dataset where the radar-only neural field baseline matches or exceeds the sharpness of geometry and Doppler frames produced by the camera-initialized version.
If this is right
- Radar simulation fidelity increases when camera angular resolution supplies the missing spatial detail.
- Cross-modal neural fields allow metric depth and weather robustness from radar to be rendered at visual resolutions.
- New paired radar-camera datasets enable direct quantitative comparison of multimodal versus single-modality reconstruction.
- Processing pipelines for single-chip radar can be developed and tested using higher-quality simulated inputs.
Where Pith is reading between the lines
- The same initialization strategy could be tested on other sensor pairs where one modality offers dense angular sampling.
- If the domain gap remains small, camera-heavy training sets might substitute for scarce labeled radar data in certain tasks.
- Shared neural representations could support joint optimization of radar and camera processing in embedded systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes RadarSim, a unified differentiable renderer that initializes a neural field from high-angular-resolution RGB camera data to generate simulated Doppler radar range images. It introduces a custom hand-held rig for calibrated radar-camera recordings and claims that this multimodal approach yields sharper geometry and Doppler frames than radar-only neural reconstructions.
Significance. If the central claim holds with supporting evidence, the work could improve radar simulation pipelines by exploiting camera resolution to compensate for radar's low spatial resolution, potentially aiding sensor prototyping and data augmentation in adverse conditions. The use of a new calibrated multimodal dataset is a positive contribution, but the absence of quantitative evaluation limits assessment of practical impact.
major comments (2)
- [Abstract] Abstract: The central demonstration is described only qualitatively ('sharper geometry and Doppler range frames') with no reported quantitative metrics, error analysis, ablation studies, or baseline comparisons. This prevents verification of the claim that the camera-initialized field improves upon radar-only methods.
- [Abstract] Abstract and method description: No details are provided on how the neural field encodes radial velocity for Doppler simulation, nor whether any radar measurements are used to supervise or fine-tune the field after camera initialization. This leaves the domain-gap concern unaddressed: camera data supplies passive appearance and lacks direct metric depth or velocity, while radar measures active time-of-flight and Doppler shifts.
minor comments (1)
- [Abstract] The abstract refers to 'a novel data set' but provides no information on its size, diversity, or calibration procedure; this should be expanded in the main text for reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation and address the noted gaps.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central demonstration is described only qualitatively ('sharper geometry and Doppler range frames') with no reported quantitative metrics, error analysis, ablation studies, or baseline comparisons. This prevents verification of the claim that the camera-initialized field improves upon radar-only methods.
Authors: We agree that the current abstract and presentation emphasize qualitative results. The manuscript body contains some visual comparisons, but we acknowledge the absence of quantitative metrics, error analysis, ablations, and explicit baselines limits verifiability. In revision we will add these elements, including PSNR/SSIM-style metrics on simulated vs. measured radar frames where ground truth is available, ablation on camera vs. radar initialization, and direct comparison to radar-only neural reconstruction baselines. The abstract will be updated to summarize the key quantitative findings. revision: yes
-
Referee: [Abstract] Abstract and method description: No details are provided on how the neural field encodes radial velocity for Doppler simulation, nor whether any radar measurements are used to supervise or fine-tune the field after camera initialization. This leaves the domain-gap concern unaddressed: camera data supplies passive appearance and lacks direct metric depth or velocity, while radar measures active time-of-flight and Doppler shifts.
Authors: We appreciate this observation on the domain gap. The neural field is camera-initialized for geometry and appearance but is subsequently supervised and fine-tuned using the radar measurements for both range and Doppler. Radial velocity is encoded as an additional output head of the MLP and queried along radar rays during differentiable rendering to produce the simulated Doppler spectrum. Radar time-of-flight and Doppler data provide the metric supervision that bridges the gap. We will expand the method section with explicit equations and diagrams describing the velocity encoding and the two-stage (camera init + radar supervision) training procedure. revision: yes
Circularity Check
No circularity; derivation relies on new calibrated dataset and external calibration
full rationale
The paper's core contribution is a camera-initialized neural field rendered via a differentiable renderer (RadarSim) to produce radar outputs, evaluated on a newly collected multi-modal dataset from a custom rig with stated external calibration. No equations or claims reduce by construction to fitted inputs, self-citations, or renamed known results; the demonstration compares against radar-only baselines on held-out recordings. The approach is self-contained against external benchmarks (new data + calibration) and does not invoke load-bearing self-citations or uniqueness theorems from prior author work.
Axiom & Free-Parameter Ledger
read the original abstract
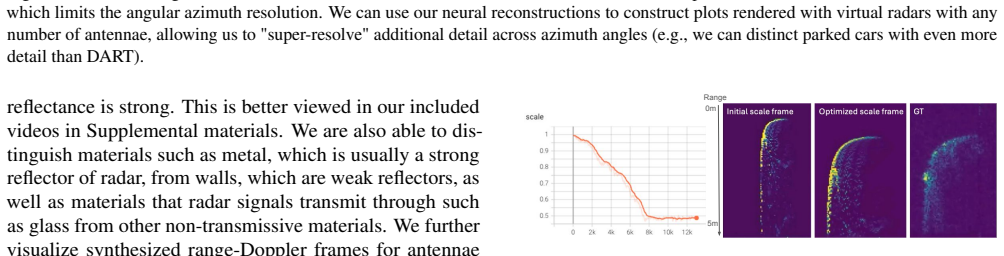
Radars are an ideal complement to cameras: both are inexpensive, solid-state sensors, with cameras offering fine angular resolution, while radars provide metric depth and robustness under adverse weather. However, radar data is more difficult to interpret than camera images and varies significantly between sensors, necessitating increased reliance on simulation for prototyping sensors and processing pipelines. Recent work treating radar reconstruction as a novel view synthesis problem has shown great promise in reconstructing radar-relevant geometry and simulating low-level radar data. However, such methods are constrained by the low spatial resolution of the underlying radar. To address this, we propose a unified differentiable renderer, RadarSim, which leverages the high angular resolution of RGB cameras to generate Doppler radar range images from a camera-initialized neural field. Using a novel data set of calibrated radar camera recordings from a custom hand-held rig, we demonstrate that RadarSim produces sharper geometry and Doppler range frames than radar-only reconstructions.
Figures










Reference graph
Works this paper leans on
-
[1]
Törf: Time-of-flight radiance fields for dynamic scene view synthesis.Advances in Neural Information Processing Sys- tems, 34, 2021
Benjamin Attal, Eliot Laidlaw, Aaron Gokaslan, Changil Kim, Christian Richardt, James Tompkin, and Matthew O’Toole. Törf: Time-of-flight radiance fields for dynamic scene view synthesis.Advances in Neural Information Processing Sys- tems, 34, 2021. 5
2021
-
[2]
Raysar - 3d sar simulator: Now open source
Stefan Auer, Richard Bamler, and Peter Reinartz. Raysar - 3d sar simulator: Now open source. 2016. 2
2016
-
[3]
Connect- ing nerfs images and text
Francesco Ballerini, Pierluigi Zama Ramirez, Roberto Mirabella, Samuele Salti, and Luigi Di Stefano. Connect- ing nerfs images and text. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 866–876, 2024. 3
2024
-
[4]
Barron, Ben Mildenhall, Dor Verbin, Pratul P
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields.CVPR, 2022. 5, 14
2022
-
[5]
Radsimreal: Bridging the gap between synthetic and real data in radar object detection with simulation
Oded Bialer and Yuval Haitman. Radsimreal: Bridging the gap between synthetic and real data in radar object detection with simulation. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15407– 15416, 2024. 2
2024
-
[6]
Radar fields: Frequency-space neural scene representations for fmcw radar
David Borts, Erich Liang, Tim Broedermann, Andrea Ra- mazzina, Stefanie Walz, Edoardo Palladin, Jipeng Sun, David Brueggemann, Christos Sakaridis, Luc Van Gool, et al. Radar fields: Frequency-space neural scene representations for fmcw radar. InACM SIGGRAPH 2024 Conference Papers, pages 1–10, 2024. 2, 3, 6, 8, 12, 15, 16
2024
-
[7]
Rf genesis: Zero-shot gener- alization of mmwave sensing through simulation-based data synthesis and generative diffusion models
Xingyu Chen and Xinyu Zhang. Rf genesis: Zero-shot gener- alization of mmwave sensing through simulation-based data synthesis and generative diffusion models. InACM Confer- ence on Embedded Networked Sensor Systems (SenSys ’23), pages 1–14, Istanbul, Turkiye, 2023. ACM, New York, NY , USA. 3
2023
-
[8]
C. J. Coleman. A ray tracing formulation and its application to some problems in over-the-horizon radar.Radio Science, 33(4):1187–1197, 1998. 2
1998
-
[9]
Radargrammetry and sar interferometry for dem generation: validation and data fusion
Michele Crosetto and F Pérez Aragues. Radargrammetry and sar interferometry for dem generation: validation and data fusion. InSAR workshop: CEOS committee on earth observation satellites, page 367, 2000. 2
2000
-
[10]
Migration of ground- penetrating radar data method with a finite-element and dis- persion.Geophysics, 69, 2004
Qingyun di and Miaoyue Wang. Migration of ground- penetrating radar data method with a finite-element and dis- persion.Geophysics, 69, 2004. 2
2004
-
[11]
Christopher Doer and Gert F. Trommer. Yaw aided radar iner- tial odometry uisng manhattan world assumptions. In2021 28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), pages 1–10, 2021. 2
2021
-
[12]
Radar fields: An extension of radiance fields to sar
Thibaud Ehret, Roger Marí, Dawa Derksen, Nicolas Gasnier, and Gabriele Facciolo. Radar fields: An extension of radiance fields to sar. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 564–574,
-
[13]
Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking.arXiv, 2021
Fong et al. Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking.arXiv, 2021. 12
2021
-
[14]
Raw high-definition radar for multi-task learning
Rebut et al. Raw high-definition radar for multi-task learning. InCVPR, pages 17021–17030, 2022. 12
2022
-
[15]
Fidelis, Fabio Reway, Herick Y
Eduardo C. Fidelis, Fabio Reway, Herick Y . S. Ribeiro, Pietro L. Campos, Werner Huber, Christian Icking, Lester A. Faria, and Torsten Schön. Generation of realistic synthetic raw radar data for automated driving applications using generative adversarial networks, 2023. 3
2023
-
[16]
A modern approach.Com- puter vision: a modern approach, 17:21–48, 2003
David A Forsyth and Jean Ponce. A modern approach.Com- puter vision: a modern approach, 17:21–48, 2003. 3
2003
-
[17]
Ge- owizard: Unleashing the diffusion priors for 3d geometry estimation from a single image
Xiao Fu, Wei Yin, Mu Hu, Kaixuan Wang, Yuexin Ma, Ping Tan, Shaojie Shen, Dahua Lin, and Xiaoxiao Long. Ge- owizard: Unleashing the diffusion priors for 3d geometry estimation from a single image. InECCV, 2024. 6, 15
2024
-
[18]
Furse, S.P
C.M. Furse, S.P. Mathur, and O.P. Gandhi. Improvements to the finite-difference time-domain method for calculating the radar cross section of a perfectly conducting target.IEEE Transactions on Microwave Theory and Techniques, 38(7): 919–927, 1990. 2
1990
-
[19]
Mariam Hassan, Florent Forest, Olga Fink, and Mal- colm Mielle. Thermonerf: Multimodal neural radiance fields for thermal novel view synthesis.arXiv preprint arXiv:2403.12154, 2024. 3
-
[20]
Soac: Spatio-temporal overlap- aware multi-sensor calibration using neural radiance fields
Quentin Herau, Nathan Piasco, Moussab Bennehar, Luis Roldao, Dzmitry Tsishkou, Cyrille Migniot, Pascal Vasseur, and Cédric Demonceaux. Soac: Spatio-temporal overlap- aware multi-sensor calibration using neural radiance fields. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15131–15140, 2024. 3
2024
-
[21]
A ray launching approach for modeling an fmcw radar system
Nils Hirsenkorn, Paul Subkowski, Timo Hanke, Alexander Schaermann, Andreas Rauch, Ralph Rasshofer, and Erwin Biebl. A ray launching approach for modeling an fmcw radar system. In2017 18th International Radar Symposium (IRS), pages 1–10, 2017. 2
2017
-
[22]
Neural lidar fields for novel view synthesis.arXiv preprint arXiv:2305.01643, 2023
Shengyu Huang, Zan Gojcic, Zian Wang, Francis Williams, Yoni Kasten, Sanja Fidler, Konrad Schindler, and Or Litany. Neural lidar fields for novel view synthesis.arXiv preprint arXiv:2305.01643, 2023. 2, 3
-
[23]
Dart: Im- plicit doppler tomography for radar novel view synthesis
Tianshu Huang, John Miller, Akarsh Prabhakara, Tao Jin, Tarana Laroia, Zico Kolter, and Anthony Rowe. Dart: Im- plicit doppler tomography for radar novel view synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 24118–24129, 2024. 2, 3, 4, 5, 6, 7, 8, 12, 14, 15, 16
2024
-
[24]
PhD thesis, Linköping University Electronic Press, 2005
Jonas Jansson.Collision Avoidance Theory: With application to automotive collision mitigation. PhD thesis, Linköping University Electronic Press, 2005. 1
2005
-
[25]
Lerf: Language embedded radiance fields
Justin Kerr, Chung Min Kim, Ken Goldberg, Angjoo Kanazawa, and Matthew Tancik. Lerf: Language embedded radiance fields. InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision, pages 19729–19739,
-
[26]
Coloradar: The direct 3d millimeter wave radar dataset.The International Journal of Robotics Research, 41(4):351–360, 2022
Andrew Kramer, Kyle Harlow, Christopher Williams, and Christoffer Heckman. Coloradar: The direct 3d millimeter wave radar dataset.The International Journal of Robotics Research, 41(4):351–360, 2022. 2, 12, 13
2022
-
[27]
Multiview three- dimensional reconstruction by millimetre-wave portable cam- era.Scientific reports, 7(1):6479, 2017
Jaime Laviada, Ana Arboleya-Arboleya, Yuri Álvarez, Borja González-Valdés, and Fernando Las-Heras. Multiview three- dimensional reconstruction by millimetre-wave portable cam- era.Scientific reports, 7(1):6479, 2017. 2, 3
2017
-
[28]
Multistatic millimeter-wave imaging by multiview portable camera.IEEE Access, 5:19259–19268, 2017
Jaime Laviada, Ana Arboleya-Arboleya, and Fernando Las- Heras. Multistatic millimeter-wave imaging by multiview portable camera.IEEE Access, 5:19259–19268, 2017
2017
-
[29]
Multiview mm-wave imaging with augmented depth camera information.IEEE Access, 6:16869–16877, 2018
Jaime Laviada, Miguel Lopez-Portugues, Ana Arboleya- Arboleya, and Fernando Las-Heras. Multiview mm-wave imaging with augmented depth camera information.IEEE Access, 6:16869–16877, 2018. 2, 3
2018
-
[30]
Signal processing for tdm mimo fmcw millimeter-wave radar sensors
Xinrong Li, Xiaodong Wang, Qing Yang, and Song Fu. Signal processing for tdm mimo fmcw millimeter-wave radar sensors. IEEE Access, 9:167959–167971, 2021. 2
2021
-
[31]
Markowitz, and Minh N
Teck-Yian Lim, Spencer A. Markowitz, and Minh N. Do. Radical: A synchronized fmcw radar, depth, imu and rgb camera data dataset with low-level fmcw radar signals.IEEE Journal of Selected Topics in Signal Processing, 15(4):941– 953, 2021. 12
2021
-
[32]
Teck-Yian Lim, Spencer A Markowitz, and Minh N Do. Rad- ical: A synchronized fmcw radar, depth, imu and rgb camera data dataset with low-level fmcw radar signals.IEEE Journal of Selected Topics in Signal Processing, 15(4):941–953, 2021. 2, 13
2021
-
[33]
Ranerf: Neural 3d reconstruction of space targets from isar image sequences.IEEE Transactions on Geoscience and Remote Sensing, 2023
Afei Liu, Shuanghui Zhang, Chi Zhang, Shuaifeng Zhi, and Xiang Li. Ranerf: Neural 3d reconstruction of space targets from isar image sequences.IEEE Transactions on Geoscience and Remote Sensing, 2023. 3
2023
-
[34]
Malinen and P
M. Malinen and P. Råback.Elmer finite element solver for multiphysics and multiscale problems. Forschungszentrum Juelich, 2013. 2
2013
-
[35]
60 ghz synthetic aper- ture radar for short-range imaging: Theory and experiments
Babak Mamandipoor, Greg Malysa, Amin Arbabian, Upa- manyu Madhow, and Karam Noujeim. 60 ghz synthetic aper- ture radar for short-range imaging: Theory and experiments. In2014 48th Asilomar Conference on Signals, Systems and Computers, pages 553–558. IEEE, 2014. 3
2014
-
[36]
Nerf: Representing scenes as neural radiance fields for view synthe- sis.Communications of the ACM, 65(1):99–106, 2021
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view synthe- sis.Communications of the ACM, 65(1):99–106, 2021. 2, 3, 4
2021
-
[37]
Minkler and J
G. Minkler and J. Minkler. CFAR: The principles of auto- matic radar detection in clutter.NASA STI/Recon Technical Report A, 90:23371, 1990. 2
1990
-
[38]
High-resolution radar dataset for semi- supervised learning of dynamic objects
Mohammadreza Mostajabi, Ching Ming Wang, Darsh Ranjan, and Gilbert Hsyu. High-resolution radar dataset for semi- supervised learning of dynamic objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2020. 3
2020
-
[39]
Instant neural graphics primitives with a multireso- lution hash encoding.ACM Transactions on Graphics (ToG), 41(4):1–15, 2022
Thomas Müller, Alex Evans, Christoph Schied, and Alexan- der Keller. Instant neural graphics primitives with a multireso- lution hash encoding.ACM Transactions on Graphics (ToG), 41(4):1–15, 2022. 5
2022
-
[40]
Mert Ozer, Maximilian Weiherer, Martin Hundhausen, and Bernhard Egger. Exploring multi-modal neural scene rep- resentations with applications on thermal imaging.arXiv preprint arXiv:2403.11865, 2024. 3
-
[41]
K-radar: 4d radar object detection for autonomous driving in various weather conditions.Advances in Neural Information Processing Systems, 35:3819–3829, 2022
Dong-Hee Paek, Seung-Hyun Kong, and Kevin Tirta Wijaya. K-radar: 4d radar object detection for autonomous driving in various weather conditions.Advances in Neural Information Processing Systems, 35:3819–3829, 2022. 2, 13
2022
-
[42]
Osprey: a mmwave approach to tire wear sens- ing
Akarsh Prabhakara, Vaibhav Singh, Swarun Kumar, and An- thony Rowe. Osprey: a mmwave approach to tire wear sens- ing. InProceedings of the 18th International Conference on Mobile Systems, Applications, and Services, pages 28–41,
-
[43]
Neural implicit surface reconstruction using imaging sonar,
Mohamad Qadri, Michael Kaess, and Ioannis Gkioulekas. Neural implicit surface reconstruction using imaging sonar. arXiv preprint arXiv:2209.08221, 2022. 3
-
[44]
3d point cloud generation with millimeter-wave radar.Proc
Kun Qian, Zhaoyuan He, and Xinyu Zhang. 3d point cloud generation with millimeter-wave radar.Proc. ACM Interact. Mob. Wearable Ubiquitous Technol., 4(4), 2020. 3
2020
-
[45]
Automotive radar and lidar systems for next generation driver assistance functions
Ralph H Rasshofer and Klaus Gresser. Automotive radar and lidar systems for next generation driver assistance functions. Advances in Radio Science, 3:205–209, 2005. 1
2005
-
[46]
Raw high-definition radar for multi-task learning
Julien Rebut, Arthur Ouaknine, Waqas Malik, and Patrick Pérez. Raw high-definition radar for multi-task learning. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 17021–17030, 2022. 2, 13
2022
-
[47]
Neural vol- umetric reconstruction for coherent synthetic aperture sonar
Albert W Reed, Juhyeon Kim, Thomas Blanford, Adithya Pediredla, Daniel C Brown, and Suren Jayasuriya. Neural vol- umetric reconstruction for coherent synthetic aperture sonar. arXiv preprint arXiv:2306.09909, 2023. 3
-
[48]
Radar cfar thresholding in clutter and multiple target situations.IEEE Transactions on Aerospace and Electronic Systems, AES-19(4):608–621, 1983
Hermann Rohling. Radar cfar thresholding in clutter and multiple target situations.IEEE Transactions on Aerospace and Electronic Systems, AES-19(4):608–621, 1983. 2
1983
-
[49]
Virtual radar: Real-time millimeter-wave radar sensor simulation for perception-driven robotics.IEEE Robotics and Automation Letters, 6(3):4704–4711, 2021
Christian Schöffmann, Barnaba Ubezio, Christoph Böhm, Stephan Mühlbacher-Karrer, and Hubert Zangl. Virtual radar: Real-time millimeter-wave radar sensor simulation for perception-driven robotics.IEEE Robotics and Automation Letters, 6(3):4704–4711, 2021. 2
2021
-
[50]
A realistic radar ray tracing simulator for large mimo-arrays in auto- motive environments.IEEE Journal of Microwaves, 1(4): 962–974, 2021
Christian Schüßler, Marcel Hoffmann, Johanna Bräunig, In- grid Ullmann, Randolf Ebelt, and Martin V ossiek. A realistic radar ray tracing simulator for large mimo-arrays in auto- motive environments.IEEE Journal of Microwaves, 1(4): 962–974, 2021. 2
2021
-
[51]
Radar remote sensing of agricul- tural canopies: A review.IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 10(5): 2249–2273, 2017
Susan C Steele-Dunne, Heather McNairn, Alejandro Monsivais-Huertero, Jasmeet Judge, Pang-Wei Liu, and Kostas Papathanassiou. Radar remote sensing of agricul- tural canopies: A review.IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 10(5): 2249–2273, 2017. 1
2017
-
[52]
Nerfstudio: A modular framework for neural radiance field development
Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, David McAllister, and Angjoo Kanazawa. Nerfstudio: A modular framework for neural radiance field development. InACM SIGGRAPH 2023 Conference Proceedings, 2023. 5, 15
2023
-
[53]
Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, et al. Nerfstudio: A modular frame- work for neural radiance field development.arXiv preprint arXiv:2302.04264, 2023. 7
-
[54]
Alignmif: Geometry-aligned multimodal implicit field for lidar-camera joint synthesis
Tang Tao, Guangrun Wang, Yixing Lao, Peng Chen, Jie Liu, Liang Lin, Kaicheng Yu, and Xiaodan Liang. Alignmif: Geometry-aligned multimodal implicit field for lidar-camera joint synthesis. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21230– 21240, 2024. 3
2024
-
[55]
Teixeira, Weng Cho Chew, M
F.L. Teixeira, Weng Cho Chew, M. Straka, M.L. Oristaglio, and T. Wang. Finite-difference time-domain simulation of ground penetrating radar on dispersive, inhomogeneous, and conductive soils.IEEE Transactions on Geoscience and Re- mote Sensing, 36(6):1928–1937, 1998. 2
1928
-
[56]
Ref-nerf: Struc- tured view-dependent appearance for neural radiance fields
Dor Verbin, Peter Hedman, Ben Mildenhall, Todd Zickler, Jonathan T Barron, and Pratul P Srinivasan. Ref-nerf: Struc- tured view-dependent appearance for neural radiance fields. In2022 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), pages 5481–5490. IEEE, 2022. 4, 15
2022
-
[57]
Automotive radar—from first efforts to future systems
Christian Waldschmidt, Juergen Hasch, and Wolfgang Men- zel. Automotive radar—from first efforts to future systems. IEEE Journal of Microwaves, 1(1):135–148, 2021. 1
2021
-
[58]
Gesture recognition for smart home applications using portable radar sensors
Qian Wan, Yiran Li, Changzhi Li, and Ranadip Pal. Gesture recognition for smart home applications using portable radar sensors. In2014 36th annual international conference of the IEEE engineering in medicine and biology society, pages 6414–6417. IEEE, 2014. 1
2014
-
[59]
High-resolution 2d sar imaging by the millimeter-wave automobile radar
Hiroyoshi Yamada, Takumi Kobayashi, Yoshio Yamaguchi, and Yuuichi Sugiyama. High-resolution 2d sar imaging by the millimeter-wave automobile radar. In2017 IEEE Conference on Antenna Measurements & Applications (CAMA), pages 149–150. IEEE, 2017. 3
2017
-
[60]
Near-field mimo- sar millimeter-wave imaging with sparsely sampled aperture data.Ieee Access, 7:31801–31819, 2019
Muhammet Emin Yanik and Murat Torlak. Near-field mimo- sar millimeter-wave imaging with sparsely sampled aperture data.Ieee Access, 7:31801–31819, 2019. 3
2019
-
[61]
Rad- det: Range-azimuth-doppler based radar object detection for dynamic road users
Ao Zhang, Farzan Erlik Nowruzi, and Robert Laganiere. Rad- det: Range-azimuth-doppler based radar object detection for dynamic road users. In2021 18th Conference on Robots and Vision (CRV), pages 95–102. IEEE, 2021. 2, 13
2021
-
[62]
Nerf2: Neural radio-frequency radiance fields
Xiaopeng Zhao, Zhenlin An, Qingrui Pan, and Lei Yang. Nerf2: Neural radio-frequency radiance fields. InProceed- ings of the 29th Annual International Conference on Mobile Computing and Networking, pages 1–15, 2023. 3
2023
-
[63]
Multimodal neural radiance field
Haidong Zhu, Yuyin Sun, Chi Liu, Lu Xia, Jiajia Luo, Nan Qiao, Ram Nevatia, and Cheng-Hao Kuo. Multimodal neural radiance field. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 9393–9399. IEEE,
-
[64]
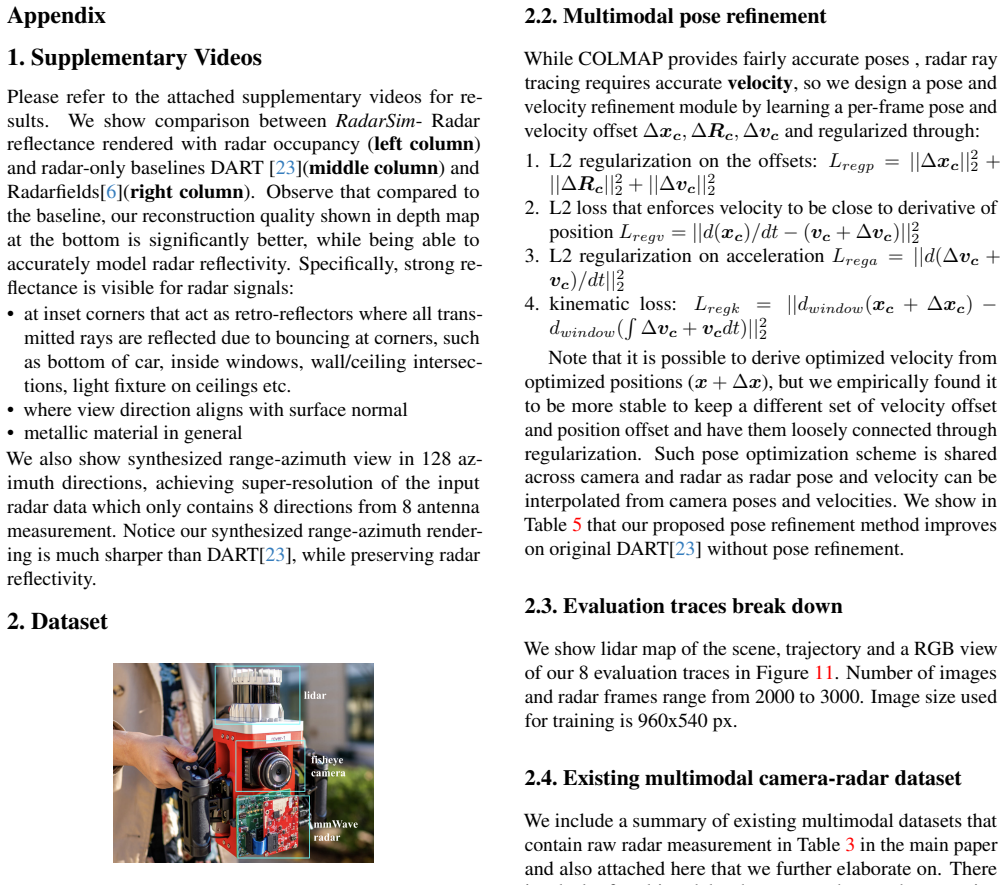
Supplementary Videos Please refer to the attached supplementary videos for re- sults. We show comparison between RadarSim- Radar reflectance rendered with radar occupancy (left column) and radar-only baselines DART [23](middle column) and Radarfields[6](right column). Observe that compared to the baseline, our reconstruction quality shown in depth map at ...
-
[65]
Image of our hand-held data collection rig with three key components labeled
Dataset Figure 10. Image of our hand-held data collection rig with three key components labeled. 2.1. Data capture rig and pose processing We build a hand-held rig for data collection with time-synced mmWave radar, fisheye camera, and lidar collecting data at 30 fps, 30 fps and 10 fps respectively. For each sequence, we run COLMAP to get camera poses Ac (...
-
[66]
L2 regularization on the offsets: Lregp =||∆x c||2 2 + ||∆Rc||2 2 +||∆v c||2 2
-
[67]
L2 loss that enforces velocity to be close to derivative of positionL regv =||d(x c)/dt−(v c + ∆vc)||2 2
-
[68]
L2 regularization on acceleration Lrega =||d(∆v c + vc)/dt||2 2
-
[69]
Such pose optimization scheme is shared across camera and radar as radar pose and velocity can be interpolated from camera poses and velocities
kinematic loss: Lregk =||d window(xc + ∆x c)− dwindow( R ∆vc +v cdt)||2 2 Note that it is possible to derive optimized velocity from optimized positions (x+ ∆x ), but we empirically found it to be more stable to keep a different set of velocity offset and position offset and have them loosely connected through regularization. Such pose optimization scheme...
2000
-
[70]
Coloradar [26] does capture indoor senes that can be used for reconstruction, but uses high-resolution radar which is also beyond our sin-radar fo- cus
also uses Cascaded Radar with a complex modulation function, which makes modelling radar rendering equation difficult for inverse rendering. Coloradar [26] does capture indoor senes that can be used for reconstruction, but uses high-resolution radar which is also beyond our sin-radar fo- cus. Most public RGB-Radar datasets, such as NuScenes [13], provide ...
-
[71]
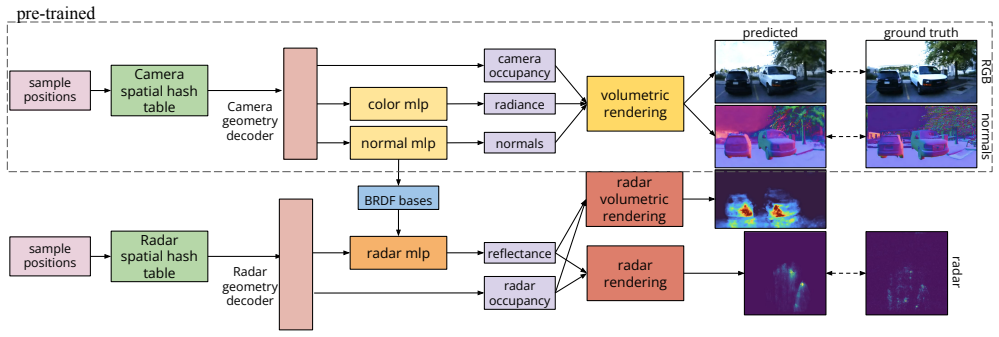
See figure 12 for detailed architecture diagram
Method details We elaborate here on technical details omitted in the main paper. See figure 12 for detailed architecture diagram. 3.1. Modelling radar view dependence with BRDF bases View dependence of Radar reflectance can be broken into 2 scenarios, surface normal dependent reflectance and sur- face normal independent reflectance. The latter includes re...
-
[72]
We use λr = 1e −3 for outdoor scenes and λr = 1e−4 for indoor scenes where abundance of multi-path reflections result in overall high reflectance in the scenes
to guide the predicted normal with gradient direction of the camera density field, and encourage normals to point outward from a surface. We use λr = 1e −3 for outdoor scenes and λr = 1e−4 for indoor scenes where abundance of multi-path reflections result in overall high reflectance in the scenes. We choose λbce = 0.01 and λssim = 0.01. We choose λnorm = ...
-
[73]
Evaluation metric and denoising procedure We calculate PSNR and SSIM values between RadarSim and ground truth for evaluation and com- parison against baselines
Experiment details and additional result 4.1. Evaluation metric and denoising procedure We calculate PSNR and SSIM values between RadarSim and ground truth for evaluation and com- parison against baselines. Because most of the radar frame consists of noise, we design a denoising procedure by finding the noise threshold for each dataset. The noise threshol...
2048
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.