Semantic Constraint Synthesis for Adaptive Trajectory Optimization via Large Language Models
Pith reviewed 2026-06-28 08:40 UTC · model grok-4.3
The pith
Large language models can translate natural language mission requirements into executable trajectory optimization code for spacecraft.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
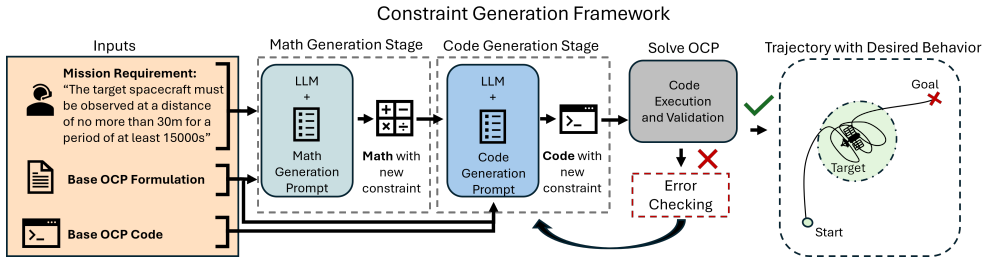
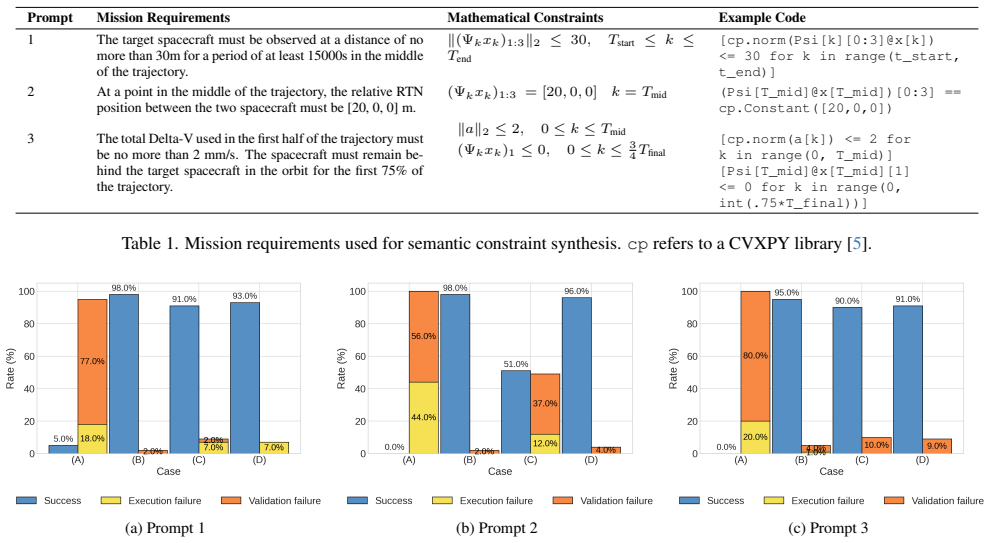
The central claim is that LLMs can translate natural language descriptions of mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations, enabling the reconditioning of convex trajectory optimization problems from semantic mission requirements with high success rates in spacecraft rendezvous scenarios.
What carries the argument
The LLM-based framework for semantic constraint synthesis that generates convex trajectory optimization problems and code from natural language mission descriptions.
If this is right
- Formulating trajectory optimization problems becomes faster and less dependent on specialized expertise.
- Space missions can more easily adapt optimization setups to changing requirements and constraints.
- Autonomous spacecraft operations gain support from automated translation of high-level intent into formal models.
- Trajectory design processes scale better to higher mission frequency and complexity.
Where Pith is reading between the lines
- Applying this to other domains like robotic path planning could yield similar benefits in reducing expert workload.
- Adding automated verification steps after LLM generation might mitigate risks from incorrect formulations.
- Testing in non-convex or more uncertain environments would reveal the limits of the current approach.
Load-bearing premise
Large language models can consistently produce mathematically correct and complete optimization formulations that fully capture the intended mission objectives.
What would settle it
A set of mission requirements where the LLM-generated optimization problem leads to trajectories that fail to meet the specified constraints in a simulated rendezvous scenario.
Figures
read the original abstract
Trajectory optimization is a critical component for enabling safe and reliable autonomous operations in space exploration. As space missions increase in frequency, complexity, and scope, there is a growing need to rapidly formulate mathematically sound trajectory optimization problems that accurately reflect mission objectives and operational constraints. However, translating mission intent into tractable analytical formulations for trajectory optimization requires substantial domain expertise. This paper presents a framework that leverages large language models (LLMs) to translate natural language descriptions of mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations. Experiments in spacecraft rendezvous scenarios demonstrate a high success rate in reconditioning a convex trajectory optimization problem from semantic mission requirements. Ultimately, this work highlights the potential of LLMs to bridge high-level intent and formal optimization models, enabling more flexible and efficient trajectory design of spacecraft.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a framework that uses large language models to translate natural language descriptions of spacecraft mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations. It reports experiments on spacecraft rendezvous scenarios claiming a high success rate in reconditioning convex trajectory optimization problems from semantic inputs.
Significance. If the experimental claims hold with proper verification of mathematical soundness, the work could meaningfully lower the barrier to formulating trajectory optimization problems by bridging natural language intent and formal models, with potential applications in rapid mission design for space systems.
major comments (2)
- [Abstract] Abstract: the central claim of a 'high success rate' in reconditioning convex problems is unsupported by any quantitative metrics, baselines, error analysis, success criteria definitions, or verification that LLM-generated formulations are mathematically correct and complete; this is load-bearing for the framework's asserted reliability.
- [Abstract] The pipeline description provides no mechanism or reported procedure for post-generation expert auditing of the LLM outputs for omissions, hallucinations, or fidelity to mission intent, which directly undermines the weakest assumption that the generated formulations are sound without such checks.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The comments highlight important areas where the abstract and pipeline description can be strengthened with additional quantitative support and explicit procedures. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of a 'high success rate' in reconditioning convex problems is unsupported by any quantitative metrics, baselines, error analysis, success criteria definitions, or verification that LLM-generated formulations are mathematically correct and complete; this is load-bearing for the framework's asserted reliability.
Authors: We agree that the abstract would benefit from greater specificity to support the 'high success rate' claim. The experiments section of the manuscript defines success criteria (formulation solvability via a convex solver plus semantic fidelity checked against mission requirements), reports trial counts, and includes basic verification via manual review of generated problems for mathematical completeness. However, these details are not reflected in the abstract. We will revise the abstract to incorporate quantitative metrics (e.g., success rate, number of scenarios), a brief definition of success, and reference to the verification approach used. revision: yes
-
Referee: [Abstract] The pipeline description provides no mechanism or reported procedure for post-generation expert auditing of the LLM outputs for omissions, hallucinations, or fidelity to mission intent, which directly undermines the weakest assumption that the generated formulations are sound without such checks.
Authors: The current pipeline description does not include an explicit post-generation auditing step. We acknowledge this as a substantive limitation for claims of reliability. In the reported experiments, a subset of outputs was manually inspected by the authors for omissions and fidelity, but this is not formalized as a pipeline component. We will revise the manuscript to describe this verification procedure, discuss its role in mitigating hallucinations, and note it as a recommended practice for deployment. revision: yes
Circularity Check
No circularity; experimental claims rest on reported outcomes, not self-referential definitions or derivations
full rationale
The paper presents an LLM-based framework for translating natural language mission requirements into trajectory optimization code and formulations, with the central claim being a high experimental success rate in spacecraft rendezvous scenarios. No equations, fitted parameters, self-citations, or derivation steps appear in the abstract or description that would reduce any result to its inputs by construction. The success metric is framed as an empirical outcome rather than a prediction derived from the framework itself or prior self-work. This is the most common honest finding for papers whose contribution is a tool plus validation experiments.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Cambridge university press, 2004
Stephen Boyd and Lieven Vandenberghe.Convex optimiza- tion. Cambridge university press, 2004. 1
2004
-
[2]
Nl2tl: Transforming natural languages to temporal log- ics using large language models
Yongchao Chen, Rujul Gandhi, Yang Zhang, and Chuchu Fan. Nl2tl: Transforming natural languages to temporal log- ics using large language models. InProceedings of the 2023 Conference on Empirical Methods in Natural Language Pro- cessing, pages 15880–15903, 2023. 2
2023
-
[3]
Chernick.Optimal Impulsive Control of Spacecraft Rel- ative Motion
M. Chernick.Optimal Impulsive Control of Spacecraft Rel- ative Motion. PhD thesis, Stanford University, 2021. 1
2021
-
[4]
D’Amico.Autonomous Formation Flying in Low Earth Orbit.PhD Thesis, Delft University, 2010
S. D’Amico.Autonomous Formation Flying in Low Earth Orbit.PhD Thesis, Delft University, 2010. 3
2010
-
[5]
Cvxpy: A python- embedded modeling language for convex optimization.Jour- nal of Machine Learning Research, 17(83):1–5, 2016
Steven Diamond and Stephen Boyd. Cvxpy: A python- embedded modeling language for convex optimization.Jour- nal of Machine Learning Research, 17(83):1–5, 2016. 3, 4
2016
-
[6]
Ecos: An socp solver for embedded systems
Alexander Domahidi, Eric Chu, and Stephen Boyd. Ecos: An socp solver for embedded systems. In2013 European control conference (ECC), pages 3071–3076. IEEE, 2013. 1
2013
-
[7]
An optimal guidance law for planetary landing
Christopher D’Souza and Christopher D’Souza. An optimal guidance law for planetary landing. InGuidance, Naviga- tion, and Control Conference, page 3709, 1997. 1
1997
-
[8]
Foundation models in robotics: Applications, challenges, and the future.The International Journal of Robotics Research, 44(5):701–739,
Roya Firoozi, Johnathan Tucker, Stephen Tian, Anirudha Majumdar, Jiankai Sun, Weiyu Liu, Yuke Zhu, Shuran Song, Ashish Kapoor, Karol Hausman, et al. Foundation models in robotics: Applications, challenges, and the future.The International Journal of Robotics Research, 44(5):701–739,
-
[9]
Space-llava: A vision-language model adapted to extraterrestrial applications
Matthew Foutter, Daniele Gammelli, Justin Kruger, Ethan Foss, Praneet Bhoj, Tommaso Guffanti, Simone D’Amico, and Marco Pavone. Space-llava: A vision-language model adapted to extraterrestrial applications. In2025 IEEE Aerospace Conference, pages 1–23, 2025. 2
2025
-
[10]
Transformers for trajectory optimiza- tion with application to spacecraft rendezvous
Tommaso Guffanti, Daniele Gammelli, Simone D’Amico, and Marco Pavone. Transformers for trajectory optimiza- tion with application to spacecraft rendezvous. InIEEE Aerospace Conference, pages 1–13, 2024. 2
2024
-
[11]
Deep reinforcement learn- ing for spacecraft proximity operations guidance.Journal of Spacecraft and Rockets, 58(2):254–264, 2021
Kirk Hovell and Steve Ulrich. Deep reinforcement learn- ing for spacecraft proximity operations guidance.Journal of Spacecraft and Rockets, 58(2):254–264, 2021. 2
2021
-
[12]
Amit Jain and Richard Linares. Autonomous reasoning for spacecraft control: A large language model framework with group relative policy optimization.arXiv preprint arXiv:2601.04334, 2026. 2
-
[13]
Zhongyuan Lyu, Shuoyu Hu, Lujie Liu, Hongxia Yang, and Ming LI. Canonical intermediate representation for llm- based optimization problem formulation and code genera- tion.arXiv preprint arXiv:2602.02029, 2026. 2
- [14]
-
[15]
Fast homotopy for spacecraft rendezvous trajectory optimization with discrete logic.Journal of Guidance, Control, and Dynamics, 46(7): 1262–1279, 2023
Danylo Malyuta and Behçet Açıkme¸ se. Fast homotopy for spacecraft rendezvous trajectory optimization with discrete logic.Journal of Guidance, Control, and Dynamics, 46(7): 1262–1279, 2023. 1
2023
-
[16]
Malyuta, T
D. Malyuta, T. P. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, and B. Açıkme¸ se. Convex Optimization for Tra- jectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently.IEEE Control Systems Magazine, 42(5):40–113, 2022. 1
2022
-
[17]
Xinyue Peng, Yanming Liu, Yihan Cang, Yuwei Zhang, Xinyi Wang, Songhang Deng, and Jiannan Cao. Nc2c: Au- tomated convexification of generic non-convex optimization problems.arXiv preprint arXiv:2601.04789, 2026. 1, 2
-
[18]
Nl4opt competition: Formulating optimiza- tion problems based on their natural language descriptions
Rindranirina Ramamonjison, Timothy Yu, Raymond Li, Haley Li, Giuseppe Carenini, Bissan Ghaddar, Shiqi He, Mahdi Mostajabdaveh, Amin Banitalebi-Dehkordi, Zirui Zhou, et al. Nl4opt competition: Formulating optimiza- tion problems based on their natural language descriptions. InNeurIPS 2022 competition track, pages 189–203. PMLR,
2022
-
[19]
Michael Szmuk, Taylor P Reynolds, and Behçet Açık- me¸ se. Successive convexification for real-time six-degree- of-freedom powered descent guidance with state-triggered constraints.Journal of Guidance, Control, and Dynamics, 43(8):1399–1413, 2020. 1
2020
-
[20]
Towards robust spacecraft trajectory optimization via transformers
Yuji Takubo, Tommaso Guffanti, Daniele Gammelli, Marco Pavone, and Simone D’Amico. Towards robust spacecraft trajectory optimization via transformers. InIEEE Aerospace Conference, 2025. 2
2025
-
[21]
Pabon, Daniele Gammelli, Marco Pavone, and Simone D’Amico
Yuji Takubo, Arpit Dwivedi, Sukeerth Ramkumar, Luis A. Pabon, Daniele Gammelli, Marco Pavone, and Simone D’Amico. Language-conditioned safe trajectory generation for spacecraft rendezvous.AIAA Journal of Guidance, Con- trol, and Dynamics (accepted), 2026. 2
2026
-
[22]
Teun van de Laar, Zengjie Zhang, Shuhao Qi, Sofie Haesaert, and Zhiyong Sun. Vernacopter: Disambiguated natural- language-driven robot via formal specifications.arXiv preprint arXiv:2409.09536, 2024. 2
-
[23]
Chatstl: A frame- work of translation from natural language to signal temporal logic specifications for autonomous vehicle navigation out of blocked scenarios
Yujin Wang, Zhaoyan Huang, Shiying Dong, Hongqing Chu, Xiang Yin, and Bingzhao Gao. Chatstl: A frame- work of translation from natural language to signal temporal logic specifications for autonomous vehicle navigation out of blocked scenarios. In2024 16th International Conference on Computer and Automation Engineering (ICCAE), pages 483–487. IEEE, 2024. 2
2024
-
[24]
Plug in the safety chip: Enforcing constraints for llm- driven robot agents
Ziyi Yang, Shreyas S Raman, Ankit Shah, and Stefanie Tellex. Plug in the safety chip: Enforcing constraints for llm- driven robot agents. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 14435–14442. IEEE, 2024. 2 Semantic Constraint Synthesis for Adaptive Trajectory Optimization via Large Language Models Supplementary Material
2024
-
[25]
You will take in 2 files:
Generation Prompts LATEX Generation Prompt Example You are an expert in optimal control problem formulation and convex optimization using cvxpy. You will take in 2 files:
-
[26]
Problem Spec: LATEX file that lays out a given optimal control problem
-
[27]
Problem Prompt: A description of a change to the given control problem in that will result in a new constraint or set of constraints for the problem Your job is to output a new Latex document with a section for each new constraint that includes: -The minimal mathematical formulation of the constraint in terms of the variables and parameters defined in the...
-
[28]
Generated LATEX Output for Prompt 1 Observation Distance Constraint Letd max = 30m be the maximum allowable relative posi- tion norm for observation
Example Output 7.1. Generated LATEX Output for Prompt 1 Observation Distance Constraint Letd max = 30m be the maximum allowable relative posi- tion norm for observation. LetT obs = 15000s be the required observation duration. Let∆tbe the time step duration in seconds. Define the number of discrete time steps for observation as M= Tobs ∆t , M∈N. Lett start...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.