Recovering Governing Equations from Solution Data: Identifiability Bounds for Linear and Nonlinear ODEs
Pith reviewed 2026-06-26 05:11 UTC · model grok-4.3
The pith
The Hausdorff distance between solution sets determines when two governing ODEs can be distinguished from data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce the Hausdorff distance on solution sets as the natural metric for comparing differential equations because it captures the worst-case separation over all admissible initial conditions. Using this metric we establish identifiability bounds for linear ODEs and for nonlinear ODEs with Lipschitz or Hölder-continuous vector fields, characterizing precisely when two distinct equations can be told apart from solution data. The same metric yields metric-entropy estimates for the relevant classes and produces sample-complexity bounds that quantify the number of solution observations needed to recover the governing equation.
What carries the argument
The Hausdorff distance on solution sets, which quantifies the largest separation between any pair of trajectories generated by two different equations over all possible initial conditions.
If this is right
- For linear ODEs the identifiability threshold is controlled by the separation of their coefficient matrices in the induced Hausdorff metric.
- For nonlinear ODEs with Lipschitz vector fields the same threshold depends on the Lipschitz constant and the diameter of the domain of initial conditions.
- The derived sample-complexity bounds scale with the metric entropy of the ODE class, giving explicit rates for both linear and nonlinear families.
- Once the Hausdorff distance exceeds the identifiability threshold, finitely many solution trajectories suffice to certify which equation generated the data.
Where Pith is reading between the lines
- The same metric could be used to compare the stability of learned versus true equations under small perturbations of initial conditions.
- Sample-complexity results might guide the minimal number of experiments needed when designing data-collection protocols for physical systems.
- Extensions to time-varying or stochastic ODEs would require only a suitable enlargement of the solution-set metric.
Load-bearing premise
The Hausdorff distance on solution sets is the right metric because it encodes the worst-case separation over all admissible initial conditions.
What would settle it
A pair of linear ODEs whose solution sets have positive Hausdorff distance yet produce identical trajectories for every initial condition in a dense set, or a pair with zero Hausdorff distance that can still be distinguished from finitely many observed solutions.
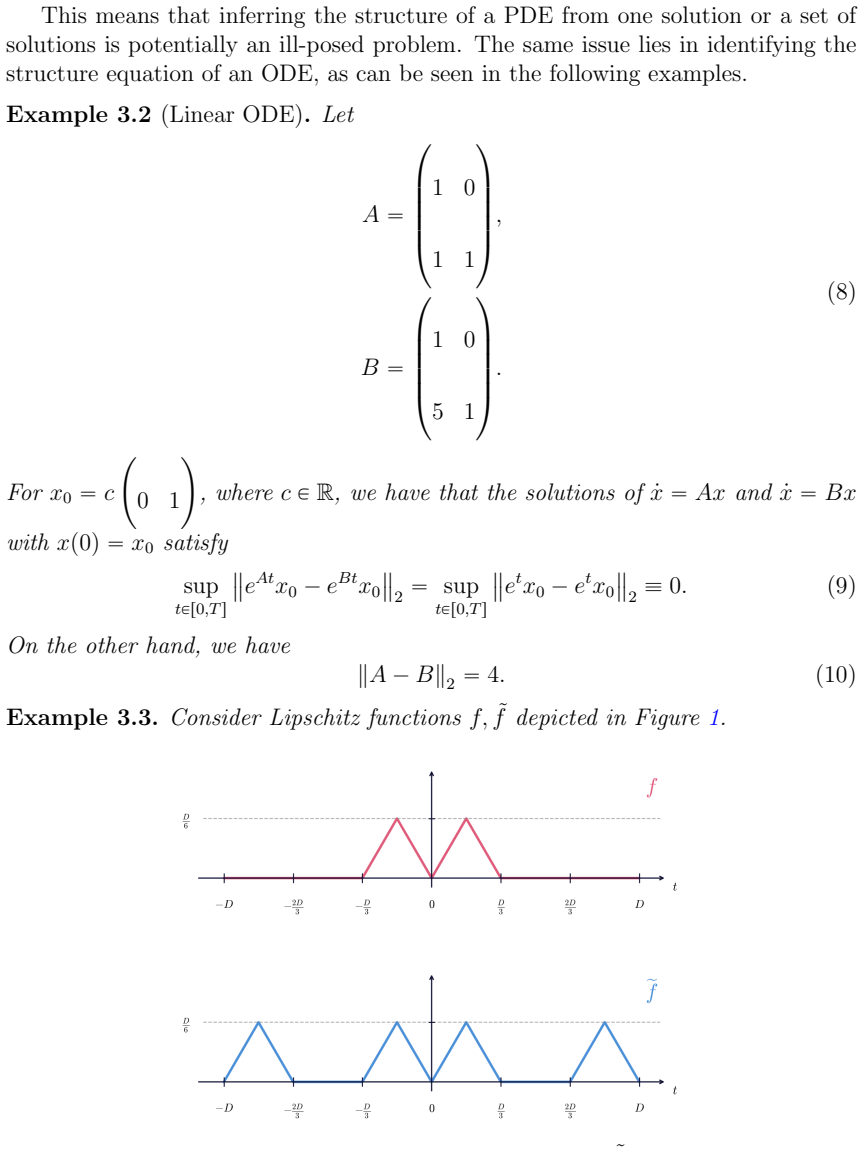
Figures
read the original abstract
Learning governing equations from observed solution data is a fundamental challenge in scientific machine learning \cite{bruntonDiscoveringGoverningEquations2016,kovachkiNeuralOperatorLearning2023,longPDENetLearningPDEs2018,rudyDatadrivenDiscoveryPartial2017,raonicConvolutionalNeuralOperators2023}, yet the theoretical conditions under which a ground-truth ODE can be uniquely and stably identified from multiple solution observations remain largely undeveloped, and no quantitative analysis of the sample complexity of such learning tasks exists in the literature. To address this gap, we introduce the Hausdorff distance on solution sets as the natural metric for comparing differential equations, since it captures the worst-case separation between two equations over all admissible initial conditions and thus encodes the minimax structure of the identification problem. We establish identifiability bounds for governing ODEs across a wide class of structure equations--ranging from linear ODEs to nonlinear classes with Lipschitz (H\"older)-continuous vector fields--characterizing precisely when two distinct equations can be distinguished from solution data. Using this metric, we derive metric entropy estimates for the relevant ODE classes and analyze sample complexity bounds, quantifying how many solution observations are needed to reliably recover the governing equation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Hausdorff distance on solution sets as the metric for comparing ODEs, since it encodes the worst-case separation over admissible initial conditions. It derives identifiability bounds for linear ODEs and for nonlinear ODEs whose vector fields are Lipschitz or Hölder continuous, characterizes when two distinct equations produce distinguishable solution trajectories, obtains metric-entropy estimates for the resulting function classes, and supplies sample-complexity bounds on the number of solution observations needed to recover the governing equation.
Significance. If the derivations hold, the work supplies the first quantitative identifiability and sample-complexity theory for data-driven recovery of ODEs, directly addressing an acknowledged gap in the scientific machine-learning literature. The Hausdorff construction yields a clean minimax formulation, the extension from linear to Hölder classes is technically substantive, and the entropy and sample-complexity results are of immediate practical value. The absence of free parameters or ad-hoc constants in the stated program is a strength.
minor comments (3)
- [§2] §2 (or wherever the Hausdorff metric is first defined): the precise statement of the admissible initial-condition set and the time horizon should be stated explicitly before the metric is introduced, to make the subsequent entropy calculations fully reproducible.
- [Abstract] The abstract claims that 'no quantitative analysis of the sample complexity … exists in the literature.' A short paragraph contrasting the new bounds with existing results on parameter identifiability for linear systems or on Lipschitz ODEs would strengthen this claim.
- [Theorem 3.2] Theorem statements that invoke covering numbers should include a brief reminder of the dependence on the Hölder exponent α and the dimension d, even if the full proof is deferred.
Simulated Author's Rebuttal
We thank the referee for the positive summary and recommendation of minor revision. The report accurately reflects the paper's contributions on identifiability bounds, Hausdorff distance, metric entropy, and sample complexity for ODE recovery.
Circularity Check
No significant circularity identified
full rationale
The paper introduces the Hausdorff distance on solution sets as a metric for ODE comparison and derives identifiability bounds, metric entropy, and sample complexity results directly from the properties of this metric space for linear and Lipschitz/Hölder classes. This is a self-contained mathematical construction: the distance is defined to encode worst-case separation over initial conditions, and the bounds follow from standard covering-number arguments in the induced metric. No load-bearing step reduces to a self-definition, fitted parameter renamed as prediction, or self-citation chain. External citations (e.g., Brunton et al.) are contextual and not invoked to justify the core uniqueness or metric properties. The derivation stands independently against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Lecture Notes Mathematics of Information
Helmut Bolcskei. “Lecture Notes Mathematics of Information”. In: (2020)
2020
-
[2]
Discovering governing equations from data: Sparse identification of nonlinear dynamical systems
Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. “Discovering Gov- erning Equations from Data: Sparse Identification of Nonlinear Dynamical Sys- tems”. In:Proceedings of the National Academy of Sciences113.15 (Apr. 2016), pp. 3932–3937.issn: 0027-8424, 1091-6490.doi:10.1073/pnas.1517384113. arXiv:1509.03580 [math]
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1073/pnas.1517384113 2016
-
[3]
Finite sample properties of system identi- fication methods
Marco C Campi and Erik Weyer. “Finite sample properties of system identi- fication methods”. In:IEEE Transactions on Automatic Control47.8 (2002), pp. 1329–1334
2002
-
[4]
Physics-informed learning of governing equations from scarce data
Zhao Chen, Yang Liu, and Hao Sun. “Physics-informed learning of governing equations from scarce data”. In:Nature communications12.1 (2021), p. 6136
2021
-
[5]
Identifiability of linear and nonlinear dynamical systems
M Grewal and Keith Glover. “Identifiability of linear and nonlinear dynamical systems”. In:IEEE Transactions on automatic control21.6 (2003), pp. 833– 837
2003
-
[6]
Martin Holler and Erion Morina.On Uniqueness in Structured Model Learning. Oct. 2024. arXiv:2410.22009
arXiv 2024
-
[7]
Metric entropy limits on recurrent neural network learning of linear dynamical systems
Clemens Hutter, Recep G¨ ul, and Helmut B¨ olcskei. “Metric entropy limits on recurrent neural network learning of linear dynamical systems”. In:Applied and Computational Harmonic Analysis59 (2022), pp. 198–223
2022
-
[8]
Springer, 2006
Victor Isakov.Inverse problems for partial differential equations. Springer, 2006
2006
-
[9]
Entropy per Unit Time as a Metric Invariant of Automor- phism
AN Kolgomorov. “Entropy per Unit Time as a Metric Invariant of Automor- phism”. In:Doklady of Russian Academy of Sciences: Moscow, Russia124 (1959), pp. 754–755
1959
-
[10]
Neural Operator: Learning Maps Between Function Spaces With Applications to PDEs
Nikola Kovachki et al. “Neural Operator: Learning Maps Between Function Spaces With Applications to PDEs”. In:Journal of Machine Learning Re- search24.89 (2023), pp. 1–97.issn: 1533-7928
2023
-
[11]
Neural operator: Learning maps between function spaces with applications to pdes
Nikola Kovachki et al. “Neural operator: Learning maps between function spaces with applications to pdes”. In:Journal of Machine Learning Research 24.89 (2023), pp. 1–97
2023
-
[12]
Fourier neural operator for parametric partial differential equations
Zongyi Li et al. “Fourier neural operator for parametric partial differential equations”. In:arXiv preprint arXiv:2010.08895(2020)
Pith/arXiv arXiv 2010
-
[13]
System identification
Lennart Ljung. “System identification”. In:Signal analysis and prediction. Springer, 1998, pp. 163–173
1998
-
[14]
On global identifiability for arbitrary model parametrizations
Lennart Ljung and Torkel Glad. “On global identifiability for arbitrary model parametrizations”. In:automatica30.2 (1994), pp. 265–276
1994
-
[15]
PDE-Net: Learning PDEs from Data
Zichao Long et al. “PDE-Net: Learning PDEs from Data”. In:Proceedings of the 35th International Conference on Machine Learning. PMLR, July 2018, pp. 3208–3216. 55
2018
-
[16]
Extrapolation and learning equa- tions
Georg Martius and Christoph H Lampert. “Extrapolation and learning equa- tions”. In:arXiv preprint arXiv:1610.02995(2016)
Pith/arXiv arXiv 2016
-
[17]
EMS press Berlin, 2023
Richard Nickl.Bayesian non-linear statistical inverse problems. EMS press Berlin, 2023
2023
-
[18]
Non-asymptotic identification of lti sys- tems from a single trajectory
Samet Oymak and Necmiye Ozay. “Non-asymptotic identification of lti sys- tems from a single trajectory”. In:2019 American control conference (ACC). IEEE. 2019, pp. 5655–5661
2019
-
[19]
Baburao G Pachpatte.Integral and finite difference inequalities and applica- tions. Vol. 205. Elsevier, 2006
2006
-
[20]
Metric-Entropy Limits on Nonlinear Dynamical System Learning
Yang Pan, Clemens Hutter, and Helmut B¨ olcskei. “Metric-Entropy Limits on Nonlinear Dynamical System Learning”. In:arXiv preprint arXiv:2407.01250 (2024)
arXiv 2024
-
[21]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations
Maziar Raissi, Paris Perdikaris, and George E Karniadakis. “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations”. In:Journal of Computational physics378 (2019), pp. 686–707
2019
-
[22]
Convolutional Neural Operators for Robust and Ac- curate Learning of PDEs
Bogdan Raonic et al. “Convolutional Neural Operators for Robust and Ac- curate Learning of PDEs”. In:Advances in Neural Information Processing Systems36 (Dec. 2023), pp. 77187–77200
2023
-
[23]
Convolutional neural operators for robust and accurate learning of PDEs
Bogdan Raonic et al. “Convolutional neural operators for robust and accurate learning of PDEs”. In:Advances in Neural Information Processing Systems36 (2024)
2024
-
[24]
ESPRIT-estimation of signal parameters via rotational invariance techniques
Richard Roy and Thomas Kailath. “ESPRIT-estimation of signal parameters via rotational invariance techniques”. In:IEEE Transactions on acoustics, speech, and signal processing37.7 (2002), pp. 984–995
2002
-
[25]
Samuel H. Rudy et al. “Data-Driven Discovery of Partial Differential Equa- tions”. In:Science Advances3.4 (Apr. 2017), e1602614.doi:10.1126/sciadv. 1602614
-
[26]
Learning equa- tions for extrapolation and control
Subham Sahoo, Christoph Lampert, and Georg Martius. “Learning equa- tions for extrapolation and control”. In:International Conference on Machine Learning. Pmlr. 2018, pp. 4442–4450
2018
-
[27]
Enhancing and Adversarial: Improve ASR with Speaker Labels
Philipp Scholl et al. “The Uniqueness Problem of Physical Law Learning”. In: ICASSP 2023 - 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Rhodes Island, Greece: IEEE, June 2023, pp. 1– 5.isbn: 978-1-72816-327-7.doi:10.1109/ICASSP49357.2023.10095017
-
[28]
Philipp Scholl et al.Well-Definedness of Physical Law Learning: The Unique- ness Problem. Jan. 2023. arXiv:2210.08342 [math-ph]
arXiv 2023
-
[29]
On the notion of entropy of a dynamical system
Yakov G Sinai. “On the notion of entropy of a dynamical system”. In:Doklady of Russian Academy of Sciences. Vol. 124. 3. 1959, pp. 768–771
1959
-
[30]
Inverse problems: a Bayesian perspective
Andrew M Stuart. “Inverse problems: a Bayesian perspective”. In:Acta nu- merica19 (2010), pp. 451–559. 56 [31]System identification - Wikipedia — en.wikipedia.org. Aug. 2025.url:https: //en.wikipedia.org/wiki/System_identification
2010
-
[31]
Akoma-Ntoso for Legal Documents
V. M. Tikhomirov. “ε-Entropy andε-Capacity of Sets In Functional Spaces”. In:Selected Works of A. N. Kolmogorov: Volume III: Information Theory and the Theory of Algorithms. Ed. by A. N. Shiryayev. Dordrecht: Springer Netherlands, 1993, pp. 86–170.isbn: 978-94-017-2973-4.doi:10.1007/978- 94-017-2973-4_7
-
[32]
AI Feynman: A physics-inspired method for symbolic regression
Silviu-Marian Udrescu and Max Tegmark. “AI Feynman: A physics-inspired method for symbolic regression”. In:Science advances6.16 (2020), eaay2631
2020
-
[33]
Martin J Wainwright.High-dimensional statistics: A non-asymptotic view- point. Vol. 48. Cambridge university press, 2019
2019
-
[34]
Wolfgang Walter.Ordinary Differential Equations. Vol. 182. Graduate Texts in Mathematics. New York, NY: Springer, 1998.doi:10.1007/978-1-4612- 0601-9
-
[35]
On the metric complexity of causal linear systems: Estimates ofε- entropy andε-dimension
G Zames. “On the metric complexity of causal linear systems: Estimates ofε- entropy andε-dimension”. In:1977 IEEE Conference on Decision and Control including the 16th Symposium on Adaptive Processes and A Special Symposium on Fuzzy Set Theory and Applications. IEEE. 1977, pp. 807–810
1977
-
[36]
Ying Zhu and Mozhgan Mirzaei. “Classes of ODE solutions: smoothness, cov- ering numbers, implications for noisy function fitting, and the curse of smooth- ness phenomenon”. In:arXiv preprint arXiv:2011.11371(2020). 57
arXiv 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.