Geometric Shape Optimization for Limbless Locomotion
Pith reviewed 2026-07-02 03:26 UTC · model grok-4.3
The pith
Optimizing Fourier-Chebyshev polynomial coefficients with bending and torsional energies models realistic limbless locomotion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Representing the body as a parametric curve in a Fourier-Chebyshev polynomial basis and solving an optimization problem over its coefficients, subject to bending and torsional energy constraints, produces non-self-intersecting and physically realistic motion sequences for limbless locomotion.
What carries the argument
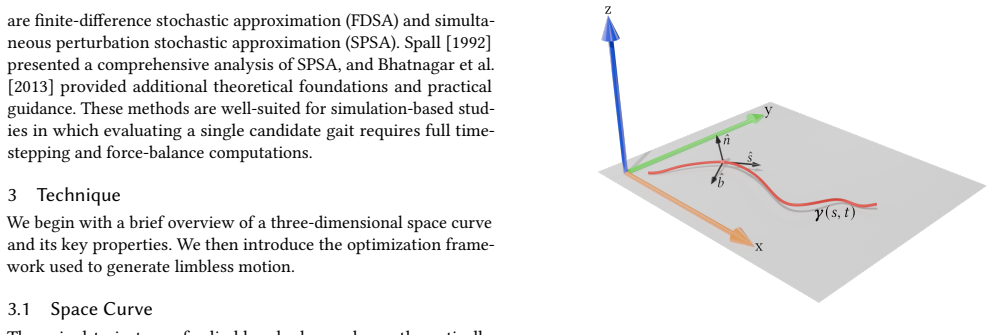
The three-dimensional parametric curve in Fourier-Chebyshev polynomial basis, with coefficients obtained by energy-augmented optimization that enforces interaction with the environment.
If this is right
- The optimized curve can be used to drive a surface representation via interpolation for visualization.
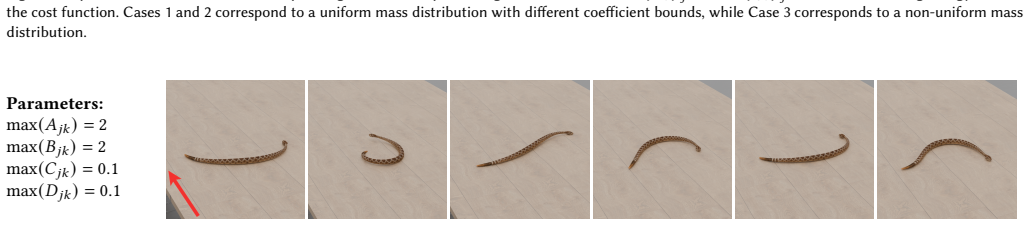
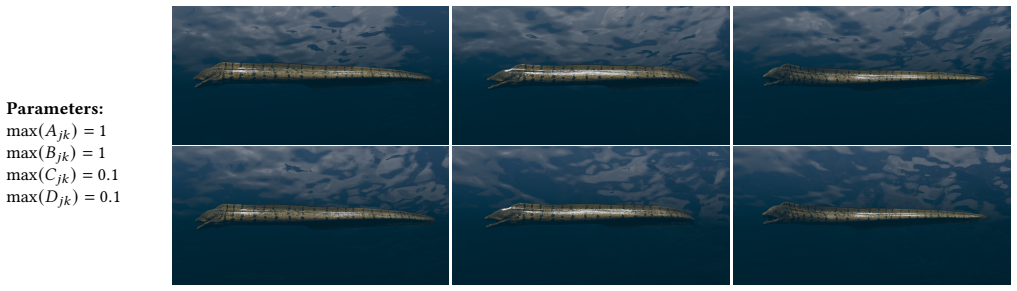
- The method applies across a range of complex scenarios and parameter settings.
- It achieves improved simulation quality compared with state-of-the-art methods.
- It generates more physically realistic motion.
Where Pith is reading between the lines
- The same polynomial optimization could be applied to design locomotion controllers for soft robots without limbs.
- Real-time performance would require checking whether the coefficient optimization scales to interactive rates.
- Comparing the resulting curves directly against motion-capture data from living snakes would test the energy terms more stringently.
Load-bearing premise
That adding bending and torsional energy terms to the optimization over polynomial coefficients will produce physically plausible, non-self-intersecting curves that accurately represent real limbless locomotion interactions.
What would settle it
A generated motion sequence containing self-intersecting curves or trajectories that violate observed physical constraints of real limbless animals would disprove the central claim.
Figures






read the original abstract
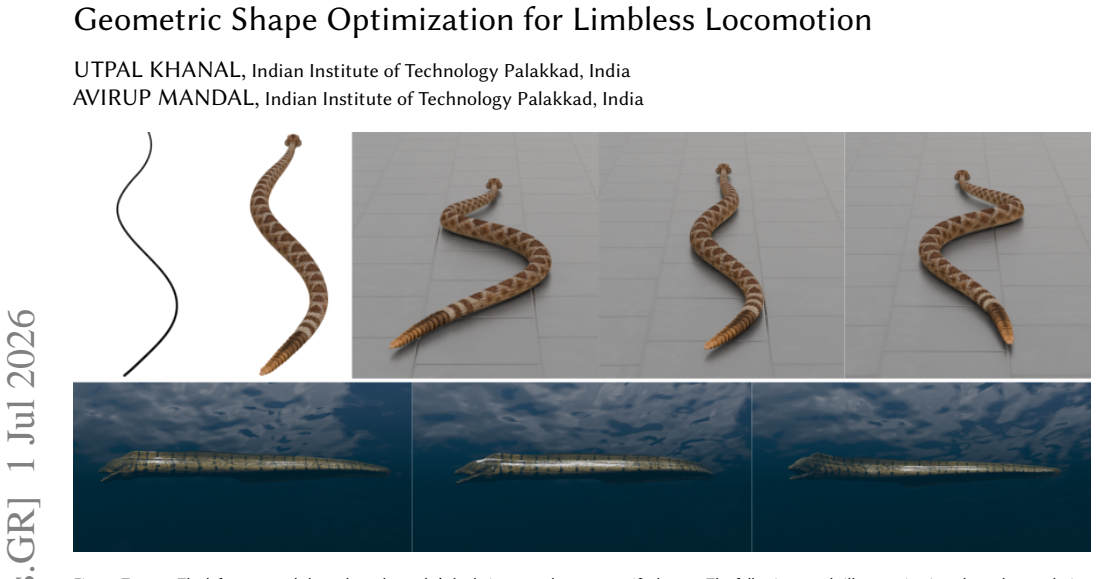
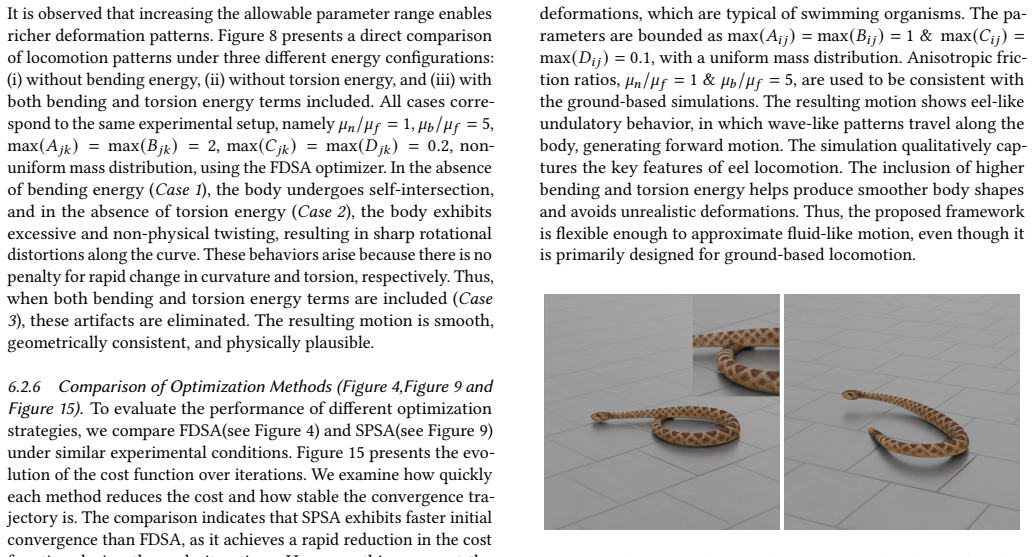
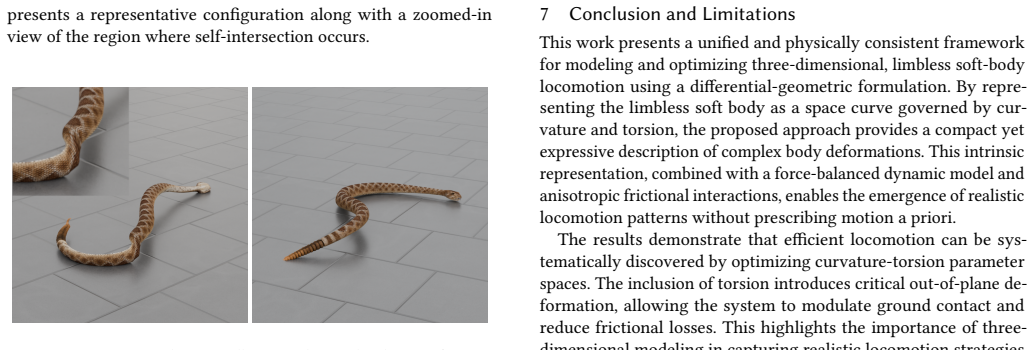
The simulation of locomotion in limbless, deformable organisms remains a challenging problem across computer graphics, soft robotics, and computational modeling. In this work, we present a novel differential-geometric framework for modeling the motion of slender soft bodies, such as snakes. The body is represented as a three-dimensional parametric curve using a Fourier-Chebyshev polynomial basis. Motion is computed by solving an optimization problem that determines the interaction between the curve and its environment by estimating polynomial coefficients. To ensure physically plausible and non-self-intersecting behavior, bending and torsional energy terms are incorporated into the formulation. The resulting curve is then used to drive a surface representation via interpolation, enabling realistic visualization analogous to skinning techniques. We evaluate the proposed approach across a range of complex scenarios and parameter settings to demonstrate its robustness and versatility. Comparative analysis with state-of-the-art methods indicates that our approach achieves improved simulation quality and generates more physically realistic motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a differential-geometric framework for limbless locomotion simulation in which a slender body is represented as a 3D parametric curve in a Fourier-Chebyshev polynomial basis. Motion is generated by optimizing the polynomial coefficients to determine curve-environment interactions, with bending and torsional energy terms added to enforce physical plausibility and non-self-intersection; the resulting curve then drives a skinned surface representation. The authors claim robustness across scenarios and superior simulation quality plus physical realism relative to state-of-the-art methods.
Significance. If the comparative claims are substantiated with quantitative evidence, the approach could supply a compact, optimization-driven alternative to full physics-based soft-body simulators, useful for graphics, animation, and soft-robotics prototyping where geometric control of locomotion gaits is desired.
major comments (2)
- [Abstract] Abstract: the central claim that the method 'achieves improved simulation quality and generates more physically realistic motion' rests on an unspecified comparative analysis; no quantitative metrics, error tables, or validation data are supplied to support this assertion.
- [Abstract] Abstract: the optimization that 'determines the interaction between the curve and its environment' is described only at the level of polynomial-coefficient estimation plus bending/torsional energies; without an explicit model of contact normals, friction coefficients, or reaction forces derived from independent measurements, it is unclear whether the resulting trajectories satisfy Newton's laws or empirical gait data rather than merely producing smooth, non-intersecting curves.
minor comments (1)
- [Abstract] The abstract refers to evaluation 'across a range of complex scenarios and parameter settings' without enumerating those scenarios or the specific parameter ranges tested.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract. We address each point below and will revise the abstract for greater precision and clarity while preserving the manuscript's core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the method 'achieves improved simulation quality and generates more physically realistic motion' rests on an unspecified comparative analysis; no quantitative metrics, error tables, or validation data are supplied to support this assertion.
Authors: The abstract summarizes results from the evaluation section, which compares the method against state-of-the-art approaches across multiple scenarios and parameter settings. We agree the abstract itself lacks explicit metrics. We will revise the abstract to briefly note the key quantitative aspects of the comparative analysis (e.g., improvements in energy efficiency and trajectory smoothness) while directing readers to the full evaluation for details. revision: yes
-
Referee: [Abstract] Abstract: the optimization that 'determines the interaction between the curve and its environment' is described only at the level of polynomial-coefficient estimation plus bending/torsional energies; without an explicit model of contact normals, friction coefficients, or reaction forces derived from independent measurements, it is unclear whether the resulting trajectories satisfy Newton's laws or empirical gait data rather than merely producing smooth, non-intersecting curves.
Authors: The framework is a geometric optimization approach in which polynomial coefficients are estimated subject to bending and torsional energy penalties that promote physically plausible, non-self-intersecting shapes; it does not solve full rigid-body dynamics or incorporate measured contact/friction parameters. We will revise the abstract to explicitly characterize the method as an energy-constrained geometric optimizer rather than a Newtonian simulator, and we will add a clarifying sentence on its relationship to empirical gait data. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The provided abstract and description outline a framework in which a Fourier-Chebyshev parametric curve is optimized over coefficients to determine environment interaction, with bending and torsional energies added to promote plausibility before surface interpolation. No equations, self-citations, or explicit reductions are present that equate the output motion or interaction model to the input energies or coefficients by construction. The central claim of improved simulation quality rests on comparative analysis against state-of-the-art methods rather than internal fitting alone, satisfying the requirement for independent content. Absent any quoted load-bearing step that reduces to a fitted parameter renamed as prediction or a self-referential definition, the derivation chain does not exhibit circularity.
Axiom & Free-Parameter Ledger
free parameters (1)
- Fourier-Chebyshev polynomial coefficients
axioms (1)
- domain assumption Bending and torsional energy terms produce physically plausible non-self-intersecting behavior
Reference graph
Works this paper leans on
-
[1]
Optimizing snake locomotion in the plane.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences469, 2159 (Nov. 2013), 20130236. doi:10.1098/rspa.2013.0236 S. Alben
-
[2]
Efficient bending and lifting patterns in snake locomotion.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences478, 2266 (Oct. 2022). doi:10.1098/rspa.2022.0312 Henry C. Astley, Chaohui Gong, Jin Dai, Matthew Travers, Miguel M. Serrano, Patricio A. Vela, Howie Choset, Joseph R. Mendelson, David L. Hu, and Daniel I. Goldman. ...
-
[3]
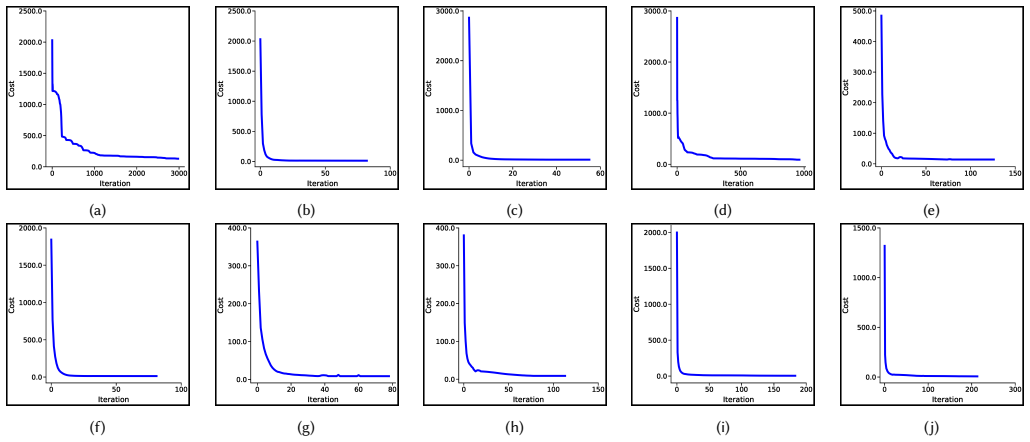
Locomotion performance metrics across different experimental configurations. Each experiment (“Exp. ”) corresponds to a specific set of friction ratios, coefficient bounds, mass distribution, and bending energy inclusion, where T, M, and B denote Top, Middle, and Bottom figures, respectively. “Opt. ” indicates the optimizer used (FDSA or SPSA). The ratios...
-
[4]
doi:10.1088/1748-3190/ac59c5 Qiyuan Fu and Chen Li
Snakes combine vertical and lateral bending to traverse uneven terrain.Bioinspiration & Biomimetics17, 3 (apr 2022), 036009. doi:10.1088/1748-3190/ac59c5 Qiyuan Fu and Chen Li
-
[5]
doi:10.1098/rsos.191192 Philip E
Robotic modelling of snake traversing large, smooth obstacles reveals stability benefits of body compliance.Royal Society Open Science7, 2 (2020), 191–192. doi:10.1098/rsos.191192 Philip E. Gill, Walter Murray, and Margaret H. Wright. 1981.Practical Optimization. Academic Press, London. J. Gray
-
[6]
The Mechanism of Locomotion in Snakes.Journal of Experimental Biology 23, 2 (Dec. 1946), 101–120. doi:10.1242/jeb.23.2.101 Oliver Gross, Yousuf Soliman, Marcel Padilla, Felix Knöppel, Ulrich Pinkall, and Peter Schröder
-
[7]
Motion from Shape Change.ACM Transactions on Graphics42, 4, Article 107 (July 2023), 11 pages. doi:10.1145/3592417 H.W. Guggenheimer. 1963.Differential Geometry. McGraw-Hill. https://books.google. co.in/books?id=vexpWdAARY8C Ross L Hatton and Howie Choset
-
[8]
doi:10.1177/ 0278364910394392 Shigeo Hirose, Peter Cave, and Charles Goulden
Geometric motion planning: The local con- nection, Stokes’ theorem, and the importance of coordinate choice.The Inter- national Journal of Robotics Research30, 8 (June 2011), 988–1014. doi:10.1177/ 0278364910394392 Shigeo Hirose, Peter Cave, and Charles Goulden. 1993.Biologically Inspired Robots: Serpentile Locomotors and Manipulators. Oxford University P...
-
[9]
Optimization of two- and three-link snakelike locomotion.Phys. Rev. E87 (Feb 2013), 022711. Issue
2013
-
[10]
doi:10.1103/PhysRevE.87. 022711 Jürgen Jost. 2017.Riemannian Geometry and Geometric Analysis(7th ed.). Vol
-
[11]
doi:10.1007/978-3-319-61860-9 V.M
Springer, Cham, Switzerland. doi:10.1007/978-3-319-61860-9 V.M. Kuznetsov, B.A. Lugovtsov, and Y.N. Sher
-
[12]
On the motive mechanism of snakes and fish.Archive for Rational Mechanics and Analysis25, 5 (Jan. 1967), 367–387. doi:10.1007/BF00291937 Cecilia Laschi, Barbara Mazzolai, and Matteo Cianchetti
-
[13]
doi:10.1126/scirobotics.aah3690 John M
Soft robotics: Technolo- gies and systems pushing the boundaries of robot abilities.Science Robotics1, 1 (2016), eaah3690. doi:10.1126/scirobotics.aah3690 John M. Lee. 2012.Introduction to Smooth Manifolds(2 ed.). Graduate Texts in Mathe- matics, Vol
-
[14]
A Terradynamics of Legged Locomotion on Granular Media.Science339, 6126 (March 2013), 1408–1412. doi:10. 1126/science.1229163 P. Liljebäck, K.Y. Pettersen, Ø. Stavdahl, and J.T. Gravdahl
2013
-
[15]
A review on modelling, implementation, and control of snake robots.Robotics and Autonomous Systems60, 1 (2012), 29–40. doi:10.1016/j.robot.2011.08.010 Hamidreza Marvi, Chaohui Gong, Nick Gravish, Henry Astley, Matthew Travers, Ross L. Hatton, Joseph R. Mendelson, Howie Choset, David L. Hu, and Daniel I. Goldman
-
[16]
Sidewinding with minimal slip: Snake and robot ascent of sandy slopes.Science 346, 6206 (Oct. 2014), 224–229. doi:10.1126/science.1255718 Gavin S. P. Miller
-
[17]
doi:10.1145/378456.378508 Ulrich Pinkall and Oliver Gross
The motion dynamics of snakes and worms.SIGGRAPH Computer Graphics22, 4 (June 1988), 169–173. doi:10.1145/378456.378508 Ulrich Pinkall and Oliver Gross. 2024.Differential Geometry: From Elastic Curves to Willmore Surfaces. Birkhäuser. doi:10.1007/978-3-031-39838-4 Richard Shine, Harold G. Cogger, Robert R. Reed, Sohan Shetty, and Xavier Bonnet
-
[18]
doi:10.1017/S0952836902003242 John J
Aquatic and terrestrial locomotor speeds of amphibious sea-snakes (Serpentes, Lati- caudidae).Journal of Zoology259, 3 (2003), 261–268. doi:10.1017/S0952836902003242 John J. Socha
-
[19]
Gliding flight in the paradise tree snake.Nature418, 6898 (2002), 603–604. doi:10.1038/418603a Yousuf Soliman, Marcel Padilla, Oliver Gross, Felix Knöppel, Ulrich Pinkall, and Peter Schröder
-
[20]
Graph.43, 4, Article 57 (July 2024), 12 pages
Going with the Flow.ACM Trans. Graph.43, 4, Article 57 (July 2024), 12 pages. doi:10.1145/3658164 J.C. Spall
-
[21]
Multivariate stochastic approximation using a simultaneous pertur- bation gradient approximation.IEEE Trans. Automat. Control37, 3 (March 1992), 332–341. doi:10.1109/9.119632 Aksel Andreas Transeth, Kristin Ytterstad Pettersen, and Pål Liljebäck
-
[22]
A survey on snake robot modeling and locomotion.Robotica27, 7 (2009), 999–1015. doi:10. 1017/S0263574709005414 Xiaolin Wang, Matthew T. Osborne, and Silas Alben
2009
-
[23]
Optimizing snake locomotion on an inclined plane.Physical Review E89, 1 (Jan. 2014). doi:10.1103/physreve.89. 012717 Bartlomiej Waszak
-
[24]
Computer Animation and Virtual Worlds29, 2 (2018), e1795
Limbless movement simulation with a particle-based system. Computer Animation and Virtual Worlds29, 2 (2018), e1795. doi:10.1002/cav.1795 e1795 cav.1795. Chris Yu, Caleb Brakensiek, Henrik Schumacher, and Keenan Crane. 2021a. Repulsive Surfaces.ACM Trans. Graph.40, 6 (2021). Chris Yu, Henrik Schumacher, and Keenan Crane. 2021b. Repulsive Curves.ACM Trans....
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.