Geometry-Aware Cross-Height Channel Knowledge Map Prediction for UAV-Assisted Communications With Uncertainty-Guided 3D Sensing
Pith reviewed 2026-07-02 14:07 UTC · model grok-4.3
The pith
A geometry-aware FPN-Transformer reconstructs dense UAV channel maps at unobserved heights from sparse altitude observations and urban scene priors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
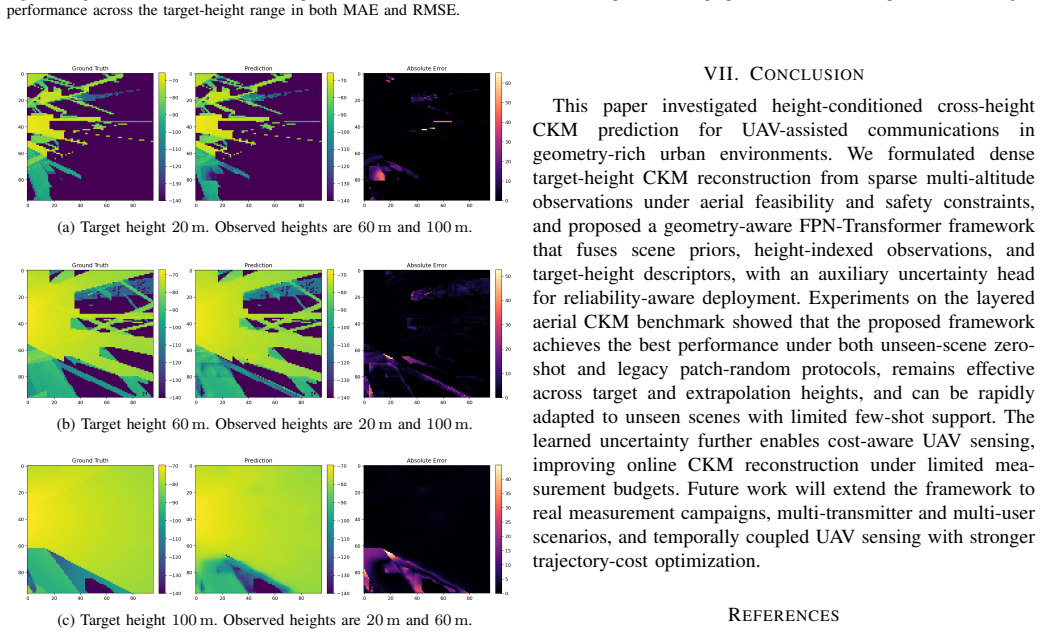
The central claim is that a geometry-aware conditional prediction framework, built around an FPN-Transformer, fuses urban scene priors with sparse multi-altitude observations and target-height descriptors to reconstruct dense channel knowledge maps at unobserved heights, while an uncertainty head supports cost-aware online UAV sensing that improves reconstruction under limited sensing budgets.
What carries the argument
The Feature Pyramid Network (FPN)-Transformer, which fuses multi-scale urban geometry features with sparse channel observations conditioned on target height to produce both the predicted map and an uncertainty estimate.
If this is right
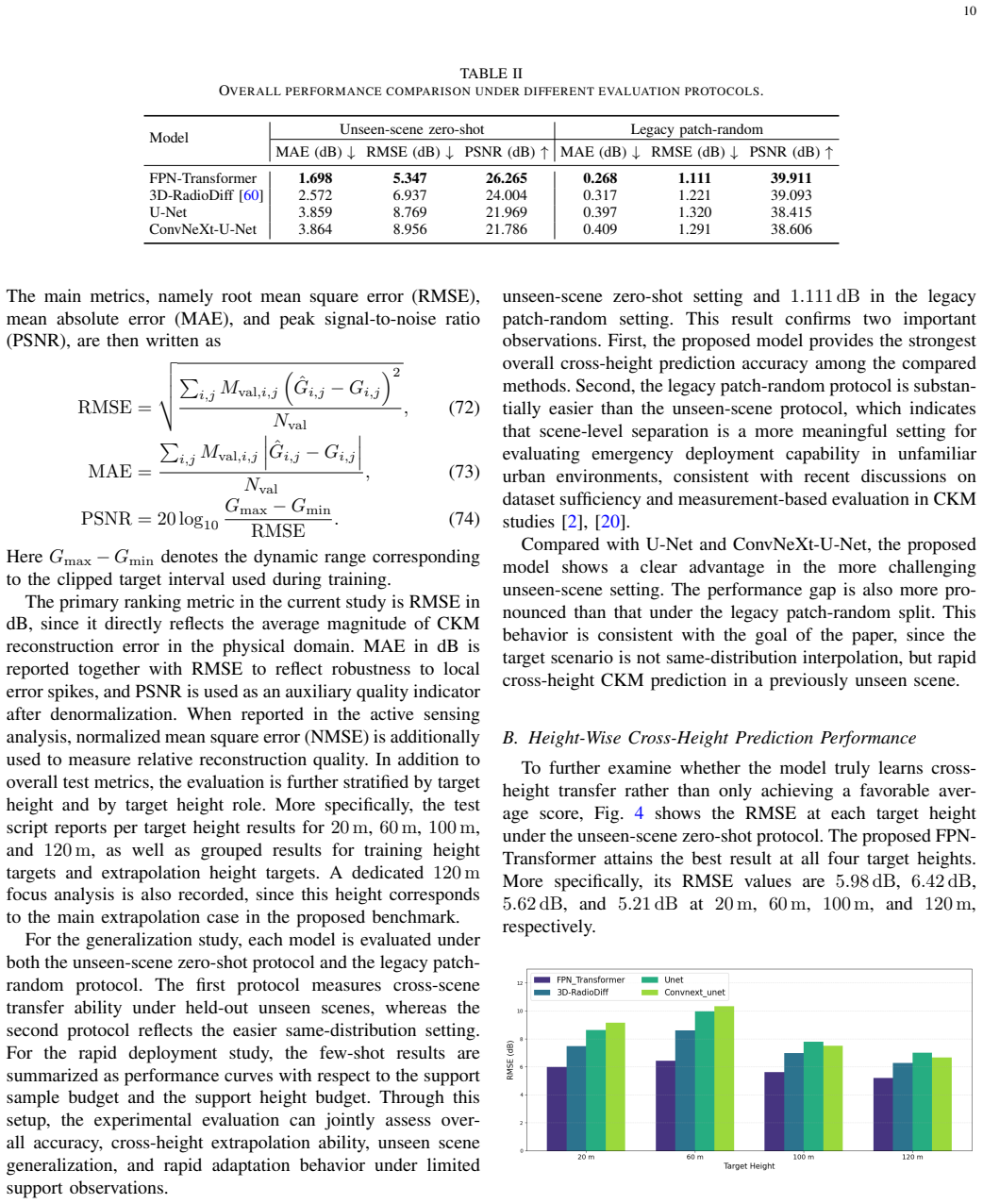
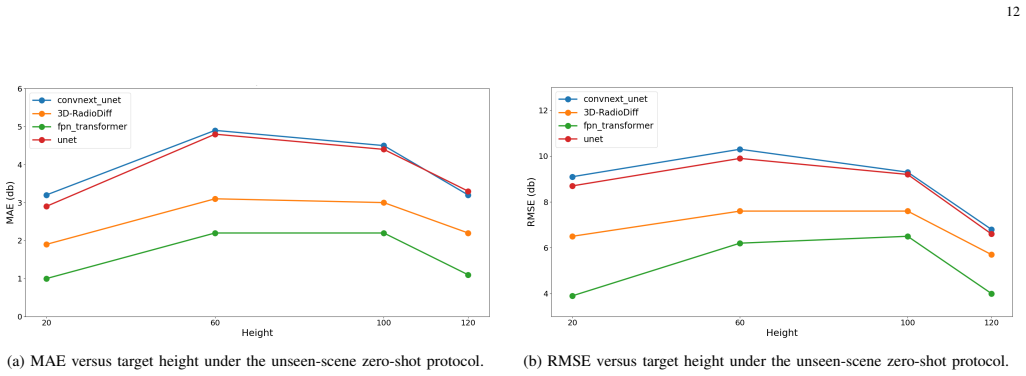
- The FPN-Transformer reaches 5.347 dB RMSE on unseen-scene zero-shot prediction versus 6.937 dB for the strongest baseline.
- Ten-shot two-height adaptation further lowers RMSE to 3.518 dB.
- Uncertainty-guided cost-aware sensing reduces active reconstruction error from 6.94 dB to 4.79 dB at a sensing budget of 40.
- The same uncertainty head outperforms both uncertainty-only and random aerial sampling policies.
Where Pith is reading between the lines
- The same conditioning mechanism could be tested for predicting maps in non-urban settings such as rural or indoor environments where geometry priors differ.
- Integration with real-time path planners might allow the UAV to choose sensing locations that also respect battery and collision constraints simultaneously.
- The uncertainty output could be used to flag regions where additional ground-based sensors would most improve the overall map.
Load-bearing premise
Urban scene priors together with sparse observations collected at only a few altitudes are enough to reconstruct accurate dense channel maps at the remaining unobserved heights.
What would settle it
Running the trained model on a new urban scene outside the layered aerial CKM benchmark and finding that zero-shot RMSE stays above 6 dB instead of dropping to the reported 5.347 dB.
Figures


read the original abstract
Low-altitude Unmanned Aerial Vehicles (UAVs) often need to infer channel knowledge across a range of heights from only sparse observations collected at a few altitude layers. To address this challenge, this paper studies height-conditioned cross-height channel knowledge map (CKM) prediction for UAV-assisted communications in geometry-rich urban environments. We develop a geometry-aware conditional prediction framework that combines urban scene priors, sparse multi-altitude observations, and target-height descriptors to reconstruct dense CKMs at unobserved target heights. An uncertainty head is further introduced to characterize prediction confidence and to support cost-aware online UAV sensing under motion and safety constraints. Experiments on a layered aerial CKM benchmark show that the proposed Feature Pyramid Network (FPN)-Transformer achieves the best overall performance under both unseen-scene zero-shot and legacy patch-random protocols, reducing the Root Mean Square Error (RMSE) to 5.347dB and 1.111dB, respectively, compared with 6.937dB and 1.221dB for the strongest baseline 3D-RadioDiff. Moreover, after applying our unseen-scene few-shot adaptation, the RMSE further decreases from 5.347dB in zero-shot prediction to 3.518dB with 10-shot two-height support, while the uncertainty-guided cost-aware sensing policy improves active reconstruction from 6.94dB at initialization to 4.79dB at sensing budget 40, outperforming uncertainty-only sensing at 5.08dB and random aerial sampling at 5.84dB.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a geometry-aware conditional prediction framework combining urban scene priors, sparse multi-altitude observations, and target-height descriptors to reconstruct dense channel knowledge maps (CKMs) at unobserved heights for UAV-assisted communications. It introduces an FPN-Transformer architecture with an uncertainty head to support cost-aware online sensing under motion constraints. Experiments on a layered aerial CKM benchmark report that the proposed model achieves RMSE of 5.347 dB (unseen-scene zero-shot) and 1.111 dB (patch-random), outperforming 3D-RadioDiff (6.937 dB and 1.221 dB); few-shot adaptation reduces zero-shot RMSE to 3.518 dB with 10-shot support, and uncertainty-guided sensing improves active reconstruction to 4.79 dB at budget 40.
Significance. If the benchmark faithfully represents real urban propagation across heights, the integration of geometry priors with uncertainty-guided active sensing could advance practical UAV channel prediction by reducing required observations while maintaining accuracy. The explicit comparison of zero-shot, few-shot, and active-sensing protocols, along with the cost-aware policy outperforming random and uncertainty-only baselines, provides a concrete path toward deployable systems in geometry-rich environments.
major comments (2)
- [Abstract, Experiments] Abstract and Experiments (presumed §4): All headline RMSE numbers (5.347 dB zero-shot, 1.111 dB patch-random, 3.518 dB 10-shot, 4.79 dB active) are obtained exclusively on the authors' single 'layered aerial CKM benchmark.' No description of benchmark generation (ray-tracing parameters, city-model diversity, material/foliage variation, or measurement noise) is provided, so it is impossible to determine whether the geometry-aware gains over 3D-RadioDiff reflect genuine generalization or benchmark-specific artifacts.
- [Methods] Methods (presumed §3): The abstract states concrete performance claims but supplies no derivation, training protocol, loss formulation, or error analysis for the FPN-Transformer or uncertainty head. Without these details the central claim that the architecture 'achieves the best overall performance' cannot be verified or reproduced from the given information.
minor comments (1)
- [Introduction] The distinction between 'unseen-scene zero-shot' and 'legacy patch-random' protocols should be defined explicitly in the introduction or experimental setup to avoid ambiguity when comparing to prior CKM work.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments below and will revise the manuscript to improve reproducibility and clarity.
read point-by-point responses
-
Referee: [Abstract, Experiments] Abstract and Experiments (presumed §4): All headline RMSE numbers (5.347 dB zero-shot, 1.111 dB patch-random, 3.518 dB 10-shot, 4.79 dB active) are obtained exclusively on the authors' single 'layered aerial CKM benchmark.' No description of benchmark generation (ray-tracing parameters, city-model diversity, material/foliage variation, or measurement noise) is provided, so it is impossible to determine whether the geometry-aware gains over 3D-RadioDiff reflect genuine generalization or benchmark-specific artifacts.
Authors: We thank the referee for this observation. The current manuscript does not include a comprehensive description of the benchmark generation process. In the revised version, we will add a dedicated subsection in the Experiments section specifying the ray-tracing parameters (frequency, propagation model, simulation resolution), city-model diversity (number and types of urban environments), material and foliage variations, and measurement noise modeling. This will allow assessment of whether the reported gains reflect genuine generalization. revision: yes
-
Referee: [Methods] Methods (presumed §3): The abstract states concrete performance claims but supplies no derivation, training protocol, loss formulation, or error analysis for the FPN-Transformer or uncertainty head. Without these details the central claim that the architecture 'achieves the best overall performance' cannot be verified or reproduced from the given information.
Authors: We acknowledge that the provided manuscript text lacks explicit derivations, training protocols, loss formulations, and error analysis. Although Section 3 outlines the FPN-Transformer and uncertainty head at a high level, we will expand the Methods section in revision to include the mathematical formulation of the geometry-aware conditional prediction, the full training protocol (optimizer, hyperparameters, data splits), the composite loss function, and an analysis of uncertainty estimation. This will support verification and reproduction. revision: yes
Circularity Check
No significant circularity detected; standard supervised learning on external benchmark.
full rationale
The paper describes a geometry-aware FPN-Transformer model trained via supervised learning on a layered aerial CKM benchmark to predict dense channel maps at target heights from sparse multi-altitude observations and scene priors. Reported RMSE figures (e.g., 5.347 dB zero-shot) are direct evaluation metrics on held-out test splits under zero-shot, few-shot, and active-sensing protocols; no equations, loss terms, or claims reduce these outputs to fitted parameters by construction, nor do any load-bearing steps rely on self-citations that themselves presuppose the target result. The derivation chain is therefore self-contained against the stated external benchmark and standard neural-network training procedures.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The layered aerial CKM benchmark is representative of real geometry-rich urban environments.
Reference graph
Works this paper leans on
-
[1]
An I2I Inpainting Approach for Efficient Channel Knowledge Map Construction,
Z. Jin, L. You, J. Wang, X.-G. Xia, and X. Gao, “An I2I Inpainting Approach for Efficient Channel Knowledge Map Construction,”IEEE Trans. Wireless Commun., vol. 24, no. 2, pp. 1415–1429, Feb. 2025
2025
-
[2]
Channel Knowledge Map-Aided Channel Prediction With Measurements-Based Evaluation,
X. Wang, Y . Shi, T. Wang, Y . Huang, Z. Hu, L. Chen, and Z. Jiang, “Channel Knowledge Map-Aided Channel Prediction With Measurements-Based Evaluation,”IEEE Trans. Commun., vol. 73, no. 5, pp. 3622–3636, May 2025
2025
-
[3]
Generating CKM Using Others’ Data: Cross-AP CKM Inference with Deep Learning,
Z. Dai, D. Wu, X. Xu, and Y . Zeng, “Generating CKM Using Others’ Data: Cross-AP CKM Inference with Deep Learning,”IEEE Trans. V eh. Technol., early access, 2025
2025
-
[4]
Generative CKM Construction using Partially Observed Data with Diffusion Model,
S. Fu, Z. Wu, D. Wu, and Y . Zeng, “Generative CKM Construction using Partially Observed Data with Diffusion Model,” inProc. IEEE VTC2025-Spring, 2025
2025
-
[5]
AIGC-Based Radio Map Con- struction for Channel Estimation in Low-Altitude Economy,
B. Yang, W. Zhang, and S. Zhang, “AIGC-Based Radio Map Con- struction for Channel Estimation in Low-Altitude Economy,” inProc. IEEE/CIC ICCC Workshops, Shanghai, China, Aug. 2025
2025
-
[6]
Deep Learning Based Channel Estimation for Deep-Space Communications,
L. Cai, G. Xu, Q. Zhang, Z. Song, and W. Zhang, “Deep Learning Based Channel Estimation for Deep-Space Communications,”IEEE Trans. V eh. Technol., vol. 74, no. 12, pp. 19743–19755, Dec. 2025
2025
-
[7]
A Comprehensive Survey of Knowledge-Driven Deep Learning for Intelligent Wireless Network Optimization in 6G,
R. Sun, N. Cheng, C. Li, W. Quan, H. Zhou, Y . Wang, W. Zhang, and X. Shen, “A Comprehensive Survey of Knowledge-Driven Deep Learning for Intelligent Wireless Network Optimization in 6G,”IEEE Commun. Surveys Tuts., vol. 28, pp. 1099–1135, 2026. 13
2026
-
[8]
Radio Map-Based Beamforming Assisted With Reduced Pilots,
B. Yang, W. Wang, and W. Zhang, “Radio Map-Based Beamforming Assisted With Reduced Pilots,”IEEE Trans. Wireless Commun., vol. 24, no. 10, pp. 8878–8891, Oct. 2025
2025
-
[9]
Performance Anal- ysis of LEO Satellite-Assisted Deep Space Communication Systems,
M. Gao, G. Xu, Z. Song, Q. Zhang, and W. Zhang, “Performance Anal- ysis of LEO Satellite-Assisted Deep Space Communication Systems,” IEEE Trans. Aerosp. Electron. Syst., vol. 61, no. 5, pp. 12628–12648, Oct. 2025
2025
-
[10]
Automatic Radio Map Adaptation for Indoor Localization Using Smartphones,
C. Wu, Z. Yang, and C. Xiao, “Automatic Radio Map Adaptation for Indoor Localization Using Smartphones,”IEEE Trans. Mobile Comput., vol. 17, no. 3, pp. 517–531, Mar. 2018
2018
-
[11]
Bayesian Active Learning for Sample Efficient 5G Radio Map Reconstruction,
K. D. Polyzos, A. Sadeghi, W. Ye, S. Sleder, K. Houssou, J. Calder, Z.-L. Zhang, and G. B. Giannakis, “Bayesian Active Learning for Sample Efficient 5G Radio Map Reconstruction,”IEEE Trans. Wireless Commun., vol. 23, no. 12, pp. 19382–19396, Dec. 2024
2024
-
[12]
Blind Radio Tomography,
D. Romero, D. Lee, and G. B. Giannakis, “Blind Radio Tomography,” IEEE Trans. Signal Process., vol. 66, no. 8, pp. 2055–2069, Apr. 2018
2055
-
[13]
A Data-Driven Transfer Learning Method for Indoor Radio Map Estimation,
R. K. Jaiswal, M. Elnourani, S. Deshmukh, and B. Beferull-Lozano, “A Data-Driven Transfer Learning Method for Indoor Radio Map Estimation,”IEEE Trans. V eh. Technol., vol. 75, no. 3, pp. 4261–4277, Mar. 2026
2026
-
[14]
Accuracy vs. Resolution in Radio Tomography,
R. K. Martin, A. Folkerts, and T. Heinl, “Accuracy vs. Resolution in Radio Tomography,”IEEE Trans. Signal Process., vol. 62, no. 10, pp. 2480–2490, May 2014
2014
-
[15]
Adaptive Bayesian Radio Tomography,
D. Lee, D. Berberidis, and G. B. Giannakis, “Adaptive Bayesian Radio Tomography,”IEEE Trans. Signal Process., vol. 67, no. 8, pp. 1964– 1979, Apr. 2019
1964
-
[16]
Aerial Base Station Placement via Propagation Radio Maps,
D. Romero, P. Q. Viet, and R. Shrestha, “Aerial Base Station Placement via Propagation Radio Maps,”IEEE Trans. Commun., vol. 72, no. 9, pp. 5349–5364, Sep. 2024
2024
-
[17]
Environment-Aware Hybrid Beamforming by Leveraging Channel Knowledge Map,
D. Wu, Y . Zeng, S. Jin, and R. Zhang, “Environment-Aware Hybrid Beamforming by Leveraging Channel Knowledge Map,”IEEE Trans. Wireless Commun., vol. 23, no. 5, pp. 4990–5005, May 2024
2024
-
[18]
Generative AI on SpectrumNet: An Open Benchmark of Multiband 3- D Radio Maps,
S. Zhang, S. Jiang, W. Lin, Z. Fang, K. Liu, H. Zhang, and K. Chen, “Generative AI on SpectrumNet: An Open Benchmark of Multiband 3- D Radio Maps,”IEEE Trans. Cogn. Commun. Netw., vol. 11, no. 2, pp. 886–899, Apr. 2025
2025
-
[19]
High-Efficiency Urban 3D Radio Map Estimation Based on Sparse Measurements,
X. Chen, X. Zhong, Z. Zhang, L. Dai, and S. Zhou, “High-Efficiency Urban 3D Radio Map Estimation Based on Sparse Measurements,”IEEE Trans. V eh. Technol., vol. 74, no. 10, pp. 16488–16493, Oct. 2025
2025
-
[20]
How Much Data Is Needed for Channel Knowledge Map Construction?,
X. Xu and Y . Zeng, “How Much Data Is Needed for Channel Knowledge Map Construction?,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13011–13021, Oct. 2024
2024
-
[21]
Channel Gain Cartography for Cognitive Radios Leveraging Low Rank and Sparsity,
D. Lee, S.-J. Kim, and G. B. Giannakis, “Channel Gain Cartography for Cognitive Radios Leveraging Low Rank and Sparsity,”IEEE Trans. Wireless Commun., vol. 16, no. 9, pp. 5953–5966, Sep. 2017
2017
-
[22]
Deep Completion Autoencoders for Radio Map Estimation,
Y . Teganya and D. Romero, “Deep Completion Autoencoders for Radio Map Estimation,”IEEE Trans. Wireless Commun., vol. 21, no. 3, pp. 1710–1724, Mar. 2022
2022
-
[23]
Deep Spectrum Cartography: Completing Radio Map Tensors Using Learned Neural Models,
S. Shrestha, X. Fu, and M. Hong, “Deep Spectrum Cartography: Completing Radio Map Tensors Using Learned Neural Models,”IEEE Trans. Signal Process., vol. 70, pp. 1170–1185, 2022
2022
-
[24]
Deep-Learning-Based Radio Map Reconstruction for V2X Communications,
S. Roger, M. Brambilla, B. C. Tedeschini, C. Botella-Mascarell, M. Co- bos, and M. Nicoli, “Deep-Learning-Based Radio Map Reconstruction for V2X Communications,”IEEE Trans. V eh. Technol., vol. 73, no. 3, pp. 3863–3876, Mar. 2024
2024
-
[25]
Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity,
J. A. Bazerque and G. B. Giannakis, “Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity,”IEEE Trans. Signal Process., vol. 58, no. 3, pp. 1847–1862, Mar. 2010
2010
-
[26]
Dynamic Spectrum Cartography: Reconstructing Spatial-Spectral-Temporal Radio Frequency Map via Tensor Completion,
X. Chen, J. Wang, and Q. Huang, “Dynamic Spectrum Cartography: Reconstructing Spatial-Spectral-Temporal Radio Frequency Map via Tensor Completion,”IEEE Trans. Signal Process., vol. 73, pp. 1184– 1199, 2025
2025
-
[27]
Paying Deformable Attention to Sparse Spatial Observations for Deep Radio Map Estimation,
K. Liu, C. Qiu, K. Chen, Q. Zheng, L. Song, and Y . Wang, “Paying Deformable Attention to Sparse Spatial Observations for Deep Radio Map Estimation,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 1436– 1450, 2026
2026
-
[28]
Radio Map Reconstruction Based on Deep Denoising Regularization for UA V Communications,
H. Zhao, Q. Hao, Y . He, H. Huang, H. Sari, F. Adachi, and G. Gui, “Radio Map Reconstruction Based on Deep Denoising Regularization for UA V Communications,”IEEE Trans. V eh. Technol., vol. 74, no. 6, pp. 9876–9881, Jun. 2025
2025
-
[29]
Radio Map-Assisted Approach for Interference- Aware Predictive UA V Communications,
B. Li and J. Chen, “Radio Map-Assisted Approach for Interference- Aware Predictive UA V Communications,”IEEE Trans. Wireless Com- mun., vol. 23, no. 11, pp. 16725–16741, Nov. 2024
2024
-
[30]
RadioDiff: An Effective Generative Diffusion Model for Sampling-Free Dynamic Radio Map Construction,
X. Wang, K. Tao, N. Cheng, Z. Yin, Z. Li, Y . Zhang, and X. Shen, “RadioDiff: An Effective Generative Diffusion Model for Sampling-Free Dynamic Radio Map Construction,”IEEE Trans. Cogn. Commun. Netw., vol. 11, no. 2, pp. 738–750, Apr. 2025
2025
-
[31]
Intelligent Reflecting Surface Enhanced Indoor Robot Path Planning: A Radio Map-Based Approach,
X. Mu, Y . Liu, L. Guo, J. Lin, and R. Schober, “Intelligent Reflecting Surface Enhanced Indoor Robot Path Planning: A Radio Map-Based Approach,”IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4732– 4747, Jul. 2021
2021
-
[32]
KAN-Based Interpretable Radio Map Prediction Framework With Symbolic Data Fusion,
C. Liao, X. Ge, M. He, Y . Zheng, and S. Liu, “KAN-Based Interpretable Radio Map Prediction Framework With Symbolic Data Fusion,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 1788–1802, 2026
2026
-
[33]
Kernel-Based Adaptive Online Reconstruction of Coverage Maps With Side Information,
M. Kasparick, R. L. G. Cavalcante, S. Valentin, S. Stanczak, and M. Yukawa, “Kernel-Based Adaptive Online Reconstruction of Coverage Maps With Side Information,”IEEE Trans. V eh. Technol., vol. 65, no. 7, pp. 5461–5473, Jul. 2016
2016
-
[34]
Learn- ing Power Spectrum Maps From Quantized Power Measurements,
D. Romero, S.-J. Kim, G. B. Giannakis, and R. Lopez-Valcarce, “Learn- ing Power Spectrum Maps From Quantized Power Measurements,”IEEE Trans. Signal Process., vol. 65, no. 10, pp. 2547–2560, May 2017
2017
-
[35]
Leveraging Transfer Learning for Radio Map Estimation via Mixture of Experts,
R. K. Jaiswal, M. Elnourani, S. Deshmukh, and B. Beferull-Lozano, “Leveraging Transfer Learning for Radio Map Estimation via Mixture of Experts,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 846–863, 2026
2026
-
[36]
Location-Free Spectrum Cartography,
Y . Teganya, D. Romero, L. M. Lopez Ramos, and B. Beferull-Lozano, “Location-Free Spectrum Cartography,”IEEE Trans. Signal Process., vol. 67, no. 15, pp. 4013–4028, Aug. 2019
2019
-
[37]
Simultaneous Navigation and Radio Mapping for Cellular-Connected UA V With Deep Reinforcement Learning,
Y . Zeng, X. Xu, S. Jin, and R. Zhang, “Simultaneous Navigation and Radio Mapping for Cellular-Connected UA V With Deep Reinforcement Learning,”IEEE Trans. Wireless Commun., vol. 20, no. 7, pp. 4205– 4220, Jul. 2021
2021
-
[38]
Space-Frequency- Interpolated Radio Map,
K. Sato, K. Suto, K. Inage, K. Adachi, and T. Fujii, “Space-Frequency- Interpolated Radio Map,”IEEE Trans. V eh. Technol., vol. 70, no. 1, pp. 714–725, Jan. 2021
2021
-
[39]
Spectrum Surveying: Active Radio Map Estimation With Autonomous UA Vs,
R. Shrestha, D. Romero, and S. P. Chepuri, “Spectrum Surveying: Active Radio Map Estimation With Autonomous UA Vs,”IEEE Trans. Wireless Commun., vol. 22, no. 1, pp. 627–640, Jan. 2023
2023
-
[40]
Theoretical Analysis of the Radio Map Estimation Problem,
D. Romero, T. N. Ha, R. Shrestha, and M. Franceschetti, “Theoretical Analysis of the Radio Map Estimation Problem,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13722–13737, Oct. 2024
2024
-
[41]
RadioGAT: A Joint Model-Based and Data- Driven Framework for Multi-Band Radiomap Reconstruction via Graph Attention Networks,
X. Li, S. Zhang, H. Li, X. Li, L. Xu, H. Xu, H. Mei, G. Zhu, N. Qi, and M. Xiao, “RadioGAT: A Joint Model-Based and Data- Driven Framework for Multi-Band Radiomap Reconstruction via Graph Attention Networks,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 17777–17792, Nov. 2024
2024
-
[42]
Radiomap Inpainting for Restricted Areas Based on Propagation Priority and Depth Map,
S. Zhang, T. Yu, B. Choi, F. Ouyang, and Z. Ding, “Radiomap Inpainting for Restricted Areas Based on Propagation Priority and Depth Map,” IEEE Trans. Wireless Commun., vol. 23, no. 8, pp. 9330–9344, Aug. 2024
2024
-
[43]
RadioUNet: Fast Radio Map Estimation With Convolutional Neural Networks,
R. Levie, C. Yapar, G. Kutyniok, and G. Caire, “RadioUNet: Fast Radio Map Estimation With Convolutional Neural Networks,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 4001–4015, Jun. 2021
2021
-
[44]
See-Through Walls: Motion Tracking Using Variance-Based Radio Tomography Networks,
J. Wilson and N. Patwari, “See-Through Walls: Motion Tracking Using Variance-Based Radio Tomography Networks,”IEEE Trans. Mobile Comput., vol. 10, no. 5, pp. 612–621, May 2011
2011
-
[45]
6G Internet of Things: A Comprehensive Survey,
D. C. Nguyen, M. Ding, P. N. Pathirana, A. Seneviratne, J. Li, D. Niyato, O. Dobre, and H. V . Poor, “6G Internet of Things: A Comprehensive Survey,”IEEE Internet Things J., vol. 9, no. 1, pp. 359–383, Jan. 2022
2022
-
[47]
Z. Zeng, K. Wang, Z. Zhang, and Y . Xiu, “GAC-KAN: An Ultra- Lightweight GNSS Interference Classifier for GenAI-Powered Con- sumer Edge Devices,”arXiv preprint arXiv:2602.11186, 2026
-
[48]
Z. Zeng, Y . Zhao, K. Wang, D. Niyato, Y . Xiu, L. Chen, Z. Zhang, and N. Wei, “PhyG-MoE: A Physics-Guided Mixture-of-Experts Framework for Energy-Efficient GNSS Interference Recognition,”arXiv preprint arXiv:2601.12798, 2026
-
[49]
Z. Zeng, Y . Zhao, K. Wang, D. Niyato, H. Shu, J. Zhao, Y . Huang, Y . Xiu, Z. Zhang, and N. Wei, “SKANet: A Cognitive Dual-Stream Framework With Adaptive Modality Fusion for Robust Compound GNSS Interference Classification,”arXiv preprint arXiv:2601.12791, 2026
-
[50]
KAN: Kolmogorov–Arnold Networks,
Z. Liu, Y . Wang, S. Vaidya, F. Ruehle, J. Halverson, M. Solja ˇci´c, T. Y . Hou, and M. Tegmark, “KAN: Kolmogorov–Arnold Networks,” inProc. Int. Conf. Learn. Represent. (ICLR), 2025
2025
-
[51]
Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence,
N. Kato, Z. M. Fadlullah, F. Tang, B. Mao, S. Tani, A. Okamura, and J. Liu, “Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence,”IEEE Wireless Commun., vol. 26, no. 4, pp. 140–147, Aug. 2019. 14
2019
-
[52]
Space-Air-Ground Integrated Network: A Survey,
J. Liu, Y . Shi, Z. M. Fadlullah, and N. Kato, “Space-Air-Ground Integrated Network: A Survey,”IEEE Commun. Surveys Tuts., vol. 20, no. 4, pp. 2714–2741, 2018
2018
-
[53]
A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems,
W. Saad, M. Bennis, and M. Chen, “A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems,” IEEE Netw., vol. 34, no. 3, pp. 134–142, May 2020
2020
-
[54]
Sionna RT: Differentiable Ray Tracing for Radio Propagation Modeling,
J. Hoydis, F. A ¨ıt Aoudia, S. Cammerer, M. Nimier-David, N. Binder, G. Marcus, and A. Keller, “Sionna RT: Differentiable Ray Tracing for Radio Propagation Modeling,” inProc. IEEE GLOBECOM Workshops, pp. 317–321, 2023
2023
-
[55]
Consistency-guided robust learning for content- agnostic radio frequency fingerprinting,
Y . Wang and G. Gui, “Consistency-guided robust learning for content- agnostic radio frequency fingerprinting,”IEEE Commun. Lett., vol. 29, no. 3, pp. 610–614, Mar. 2025
2025
-
[56]
Open-set automatic modulation classification using deep metric learning and OpenMax,
C. Ai, W. Sun, X. Zhang, H. Gacanin, H. Sari, F. Adachi, and G. Gui, “Open-set automatic modulation classification using deep metric learning and OpenMax,” inProc. IEEE VTC2025-Spring, 2025
2025
-
[57]
Z. Zeng, N. Wei, M. B. Mollah, K. Wang, P. L. Yeoh, F. Xu, Y . Xiu, and Z. Zhang, “Sparse Gain Radio Map Reconstruction With Geometry Priors and Uncertainty-Guided Measurement Selection,”arXiv preprint arXiv:2604.05788, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[58]
Z. Zeng, H. Shu, K. Wang, L. Chen, A. Hussian, Y . Huang, J. Zhao, Y . Xiu, and Z. Zhang, “JSR-GFNet: Jamming-to-Signal Ratio-Aware Dynamic Gating for Interference Classification in Future Cognitive Global Navigation Satellite Systems,”arXiv preprint arXiv:2602.00042, 2026
-
[59]
Framework and Overall Objectives of the Future Development of IMT for 2030 and Beyond,
ITU-R, “Framework and Overall Objectives of the Future Development of IMT for 2030 and Beyond,” International Telecommunication Union, Recommendation ITU-R M.2160-0, Nov. 2023
2030
-
[60]
3D-RadioDiff: An Altitude-Conditioned Diffusion Model for 3D Radio Map Construction,
L. Zhao, Z. Fei, X. Wang, J. Luo, and Z. Zheng, “3D-RadioDiff: An Altitude-Conditioned Diffusion Model for 3D Radio Map Construction,” IEEE Wireless Commun. Lett., vol. 14, no. 7, pp. 1969–1973, 2025
1969
-
[61]
UniRM: A Universal Large Model for Multiband 3D Radio Map Construction,
X. Jiang, T. Li, Z. Xiao, K. Chen, S. Ma, Z. Wang, and K. Li, “UniRM: A Universal Large Model for Multiband 3D Radio Map Construction,” IEEE J. Sel. Areas Commun., vol. 44, 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.