Families of Control-Cost-Parametrized Inverse-Optimal Universal Stabilizers
Pith reviewed 2026-06-27 15:49 UTC · model grok-4.3
The pith
Choosing a control cost function yields a parametrized family of inverse-optimal universal stabilizers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
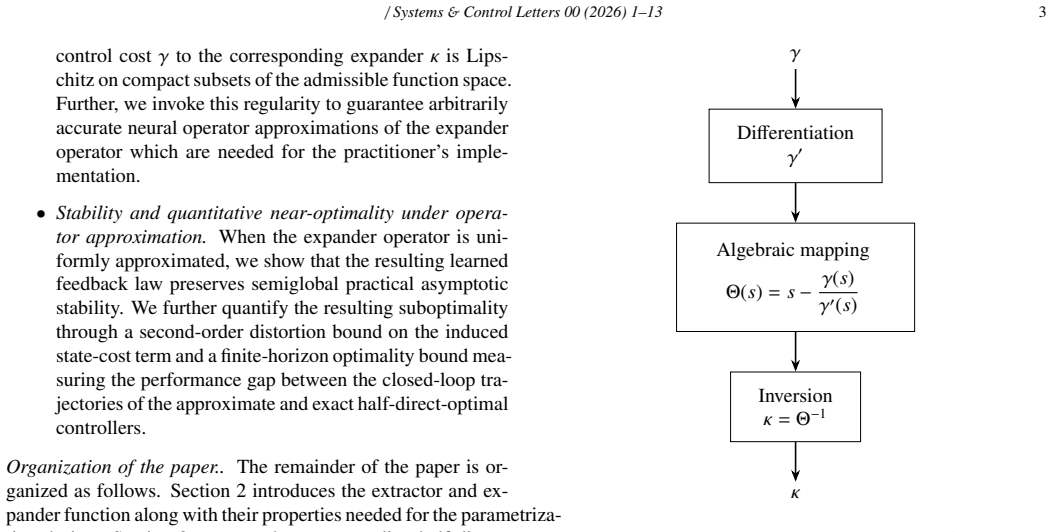
A cost-parametrized family of stabilizing feedback laws is obtained by applying a three-step cost-to-expander construction to a pre-existing universal controller, where the user selects the running cost on control and the resulting expander solves an inverse-optimal problem with an induced state cost; the cost-to-expander operator is Lipschitz and supports neural approximation with proven semiglobal practical asymptotic stability and second-order suboptimality.
What carries the argument
The cost-to-expander operator, a nonlinear infinite-dimensional map that takes a control cost function through differentiation and inversion to produce an expander of the universal controller.
If this is right
- Uniform neural operator approximation becomes possible for the entire family due to the Lipschitz property.
- Offline performance exploration and online adaptation are supported by the approximation.
- Semiglobal practical asymptotic stability is achieved under the neural approximation.
- Second-order suboptimality bounds hold for the approximated controllers.
Where Pith is reading between the lines
- Similar constructions might apply to other classes of controllers beyond universal stabilizers if the inversion step can be defined.
- The dual problem with arbitrary state cost could be addressed with different techniques since it is noted as easier.
- Testing the Lipschitz constant numerically for specific plants would validate the approximation guarantees.
- Extensions to time-varying or stochastic systems could follow if the base universal controller generalizes.
Load-bearing premise
A pre-existing universal controller must exist for the plant and the chosen control cost must admit a well-defined inverse after differentiation.
What would settle it
Finding a plant and control cost where the three-step construction fails to produce an invertible map or where the resulting feedback does not stabilize would falsify the general applicability.
Figures
read the original abstract
A classical universal stabilization formula offers the practitioner no design freedom: it is a single, parameter-free object. We introduce a cost-parametrized family of stabilizing feedback laws, where (1) the user chooses a function that serves as the running cost on control in an inverse-optimal cost functional, and (2) obtains, through a formula, a nonlinear "expander" of a pre-existing universal controller, which solves an infinite-horizon optimal control problem with a meaningful cost on the state. The cost-to-expander formula is a three-step construction, involving, inter alia, cost differentiation and function inversion-overall, a nonlinear infinite-dimensional operator. The cost-to-expander operator is proven Lipschitz, which enables uniform neural operator approximation of the entire family and supports both offline performance exploration and online adaptation. Semiglobal practical asymptotic stability and second-order suboptimality bounds are established under the approximation. The operator learning and its use in semiglobal stabilization are illustrated numerically. We call the result 'half-direct-optimal' because the paper's design is less than a general 'direct optimal' (HJB-inducing) control, but more than the fully inverse optimal, since the user performs minimization for an arbitrary given cost on control. The dual to the half-direct problem we solve is the problem in which the cost on the state is arbitrary and given. This dual problem is easier and outside of the scope of the paper.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a cost-parametrized family of inverse-optimal universal stabilizers. A user supplies a running cost on control; a three-step construction (involving differentiation and inversion) produces a nonlinear expander of a pre-existing universal controller that solves an infinite-horizon problem with a derived state cost. The resulting cost-to-expander operator is claimed to be Lipschitz continuous, which enables uniform neural-operator approximation of the entire family. Semiglobal practical asymptotic stability and second-order suboptimality bounds are established for the approximated controllers. Numerical examples illustrate operator learning and its use in stabilization. The design is positioned as 'half-direct-optimal.'
Significance. If the Lipschitz property and the attendant stability/suboptimality results hold under appropriate hypotheses, the work supplies a principled route to inject design freedom into universal stabilization while preserving inverse optimality. The Lipschitz continuity of the infinite-dimensional operator is a technically useful property that directly supports both offline performance exploration and online adaptation via neural operators. The second-order suboptimality bound under approximation is a concrete quantitative contribution.
major comments (2)
- [Abstract] Abstract: The three-step cost-to-expander construction requires differentiation of the chosen running cost followed by inversion to obtain the expander. No explicit function-space or plant-class hypotheses are stated that guarantee the inverse exists, is unique, and yields a Lipschitz map uniformly over the family of admissible costs. This domain specification is load-bearing for the Lipschitz claim, the uniform neural-operator approximation result, and the subsequent semiglobal stability and suboptimality bounds.
- [Abstract] Abstract: The semiglobal practical asymptotic stability and second-order suboptimality bounds are asserted under neural-operator approximation, yet the dependence of the practical stability margin and the suboptimality constant on the approximation error is not quantified. Without these explicit error bounds it is difficult to assess how small the neural approximation must be to recover the claimed performance.
minor comments (1)
- [Abstract] The term 'half-direct-optimal' is introduced without a concise comparison table or diagram relating it to classical inverse-optimal and direct (HJB) designs; adding such a comparison would improve readability.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive report. The two major comments identify important points for clarification. We address them point by point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The three-step cost-to-expander construction requires differentiation of the chosen running cost followed by inversion to obtain the expander. No explicit function-space or plant-class hypotheses are stated that guarantee the inverse exists, is unique, and yields a Lipschitz map uniformly over the family of admissible costs. This domain specification is load-bearing for the Lipschitz claim, the uniform neural-operator approximation result, and the subsequent semiglobal stability and suboptimality bounds.
Authors: The full manuscript (Sections II and III) defines the admissible running costs as C^2 functions whose Hessian is positive definite and satisfies uniform growth conditions, and the plants as control-affine systems whose drift and control vector fields are locally Lipschitz and satisfy a uniform controllability rank condition. Under these hypotheses the implicit-function theorem guarantees that the inversion step is well-defined and unique on a neighborhood of the origin, and the resulting cost-to-expander operator is Lipschitz continuous with a constant independent of the particular admissible cost. The abstract is a concise summary and therefore omits the full technical hypotheses; we will add a single sentence to the abstract that states the function-space and plant-class assumptions under which the claims hold. revision: yes
-
Referee: [Abstract] Abstract: The semiglobal practical asymptotic stability and second-order suboptimality bounds are asserted under neural-operator approximation, yet the dependence of the practical stability margin and the suboptimality constant on the approximation error is not quantified. Without these explicit error bounds it is difficult to assess how small the neural approximation must be to recover the claimed performance.
Authors: The stability and suboptimality proofs rely on the Lipschitz continuity of the cost-to-expander operator to translate the uniform approximation error of the neural operator into a perturbation of the closed-loop vector field. While the dependence is therefore controlled by the operator Lipschitz constant, the manuscript does not derive an explicit scaling (e.g., practical neighborhood radius = O(ε) or suboptimality gap = O(ε^2) where ε is the approximation error in the C^0 norm). We agree this explicit dependence is useful for practical assessment and will add a corollary that states the scaling in terms of the operator Lipschitz constant and the neural-operator error bound. revision: yes
Circularity Check
No circularity: operator defined from external controller and user cost; Lipschitz claim presented as independent proof.
full rationale
The abstract defines the cost-to-expander operator explicitly from a pre-existing universal controller (external input) and a user-supplied running cost on control. The three-step construction (differentiation + inversion) is stated as a nonlinear operator whose Lipschitz property is proven to enable approximation; no equation reduces the output to the input by definition, no fitted parameter is relabeled as prediction, and no load-bearing step rests on self-citation. Suboptimality bounds are conditioned on the approximation, preserving independence of the base derivation. This matches the default expectation of a self-contained construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption A pre-existing universal stabilizing controller exists for the plant.
- domain assumption The user-chosen control cost admits a well-defined inverse after differentiation.
Reference graph
Works this paper leans on
-
[1]
E. D. Sontag, A ‘universal’ construction of artstein’s theorem on non- linear stabilization, Systems & Control Letters 13 (2) (1989) 117–123. doi:https://doi.org/10.1016/0167-6911(89)90028-5. URLhttps://www.sciencedirect.com/science/article/pii/ 0167691189900285
-
[2]
J. Curtis, R. Beard, Satisficing: a new approach to constructive nonlinear control, IEEE Transactions on Automatic Control 49 (7) (2004) 1090– 1102.doi:10.1109/TAC.2004.831176
-
[3]
J. W. Curtis, R. W. Beard, A complete parameterization of CLF-based input-to-state stabilizing control laws, International Journal of Robust and Nonlinear Control 14 (17) (2004) 1393–1420.arXiv:https: //onlinelibrary.wiley.com/doi/pdf/10.1002/rnc.961, doi:https://doi.org/10.1002/rnc.961. URLhttps://onlinelibrary.wiley.com/doi/abs/10.1002/ rnc.961
-
[4]
Z. Artstein, Stabilization with relaxed controls, Nonlinear Analysis: The- ory, Methods & Applications 7 (11) (1983) 1163–1173.doi:https: //doi.org/10.1016/0362-546X(83)90049-4. URLhttps://www.sciencedirect.com/science/article/pii/ 0362546X83900494
-
[5]
Y . Lin, E. D. Sontag, A universal formula for stabilization with bounded controls, Systems & Control Letters 16 (6) (1991) 393–397.doi:https: //doi.org/10.1016/0167-6911(91)90111-Q. URLhttps://www.sciencedirect.com/science/article/pii/ 016769119190111Q
-
[6]
Y . Lin, E. D. Sontag, Control-Lyapunov universal formulas for restricted inputs, Control-Theory and Advanced Technology 10 (4, part 5) (1995) 1981–2004
1995
-
[7]
I. Karafyllis, Z.-P. Jiang, Global stabilization of nonlinear systems based on vector control lyapunov functions, IEEE Transactions on Auto- matic Control 58 (10) (2013) 2550–2562.doi:10.1109/TAC.2013. 2264855
-
[8]
Liberzon, E
D. Liberzon, E. D. Sontag, Y . Wang, Universal construction of feedback laws achieving iss and integral-iss disturbance attenuation, Systems & Control Letters 46 (2) (2002) 111–127.doi:https://doi.org/10. 1016/S0167-6911(02)00125-1. URLhttps://www.sciencedirect.com/science/article/pii/ S0167691102001251
2002
-
[9]
F. Clarke, Y . Ledyaev, E. Sontag, A. Subbotin, Asymptotic controllability implies feedback stabilization, IEEE Transactions on Automatic Control 42 (10) (1997) 1394–1407.doi:10.1109/9.633828. 11 /Systems&Control Letters 00 (2026) 1–1312
-
[10]
P. Ong, J. Cort ´es, Universal formula for smooth safe stabilization, in: 2019 IEEE 58th Conference on Decision and Control (CDC), 2019, pp. 2373–2378.doi:10.1109/CDC40024.2019.9030225
-
[11]
P. Mestres, J. Cort ´es, E. D. Sontag, Neural network-based universal formulas for control,https://arxiv.org/abs/2505.24744(2025). arXiv:2505.24744
Pith/arXiv arXiv 2025
-
[12]
R. E. Kalman, When is a linear control system optimal?, Jour- nal of Basic Engineering 86 (1) (1964) 51–60.arXiv:https: //asmedigitalcollection.asme.org/fluidsengineering/ article-pdf/86/1/51/5763755/51_1.pdf,doi:10.1115/1. 3653115. URLhttps://doi.org/10.1115/1.3653115
work page doi:10.1115/1 1964
-
[13]
IEEE Transactions on Automatic Control , author =
P. Moylan, B. Anderson, Nonlinear regulator theory and an inverse op- timal control problem, IEEE Transactions on Automatic Control 18 (5) (1973) 460–465.doi:10.1109/TAC.1973.1100365
-
[14]
R. A. Freeman, P. V . Kokotovic, Inverse optimality in robust stabilization, SIAM Journal on Control and Optimization 34 (4) (1996) 1365–1391. arXiv:https://doi.org/10.1137/S0363012993258732,doi:10. 1137/S0363012993258732. URLhttps://doi.org/10.1137/S0363012993258732
-
[15]
N. Nakamura, H. Nakamura, H. Nishitani, Global inverse optimal con- trol with guaranteed convergence rates of input affine nonlinear sys- tems, IEEE Transactions on Automatic Control 56 (2) (2011) 358–369. doi:10.1109/TAC.2010.2053731
-
[16]
M. Krstic, Z.-H. Li, Inverse optimal design of input-to-state stabilizing nonlinear controllers, IEEE Transactions on Automatic Control 43 (3) (1998) 336–350.doi:10.1109/9.661589
-
[18]
F. Ornelas-Tellez, E. N. Sanchez, A. G. Loukianov, J. J. Rico, Ro- bust inverse optimal control for discrete-time nonlinear system stabiliza- tion, European Journal of Control 20 (1) (2014) 38–44.doi:https: //doi.org/10.1016/j.ejcon.2013.08.001. URLhttps://www.sciencedirect.com/science/article/pii/ S0947358013001544
-
[19]
H. Deng, M. Krsti ´c, Stochastic nonlinear stabilization — ii: Inverse opti- mality, Systems & Control Letters 32 (3) (1997) 151–159.doi:https: //doi.org/10.1016/S0167-6911(97)00067-4. URLhttps://www.sciencedirect.com/science/article/pii/ S0167691197000674
-
[20]
K. Do, Global inverse optimal stabilization of stochastic nonholonomic systems, Systems & Control Letters 75 (2015) 41–55.doi:https: //doi.org/10.1016/j.sysconle.2014.11.003. URLhttps://www.sciencedirect.com/science/article/pii/ S0167691114002369
-
[21]
Z.-H. Li, M. Krsti ´c, Optimal design of adaptive tracking controllers for non-linear systems, Automatica 33 (8) (1997) 1459–1473.doi:https: //doi.org/10.1016/S0005-1098(97)00072-1. URLhttps://www.sciencedirect.com/science/article/pii/ S0005109897000721
-
[22]
Dvijotham, E
K. Dvijotham, E. Todorov, Inverse optimal control with linearly-solvable MDPs, in: Proceedings of the 27th International Conference on Interna- tional Conference on Machine Learning, ICML’10, Omnipress, Madison, WI, USA, 2010, p. 335–342
2010
-
[24]
I. Karafyllis, F. V okos, M. Krstic, A complete inverse optimality study for a tank-liquid system, Systems & Control Letters 207 (2026) 106293. doi:https://doi.org/10.1016/j.sysconle.2025.106293. URLhttps://www.sciencedirect.com/science/article/pii/ S0167691125002750
-
[25]
M. Krstic, Inverse optimal safety filters, IEEE Transactions on Automatic Control 69 (1) (2024) 16–31.doi:10.1109/TAC.2023.3278788
-
[26]
M. Krstic, Contractor-expander and universal inverse optimal posi- tive nonlinear control,https://arxiv.org/abs/2603.02530(2026). arXiv:2603.02530
arXiv 2026
-
[27]
W. Luo, Y .-C. Chu, K.-V . Ling, Inverse optimal adaptive control for at- titude tracking of spacecraft, IEEE Transactions on Automatic Control 50 (11) (2005) 1639–1654.doi:10.1109/TAC.2005.858694
-
[28]
K. Do, Global inverse optimal control of vertical take-offand land- ing aircraft, IFAC Journal of Systems and Control 15 (2021) 100132. doi:https://doi.org/10.1016/j.ifacsc.2020.100132. URLhttps://www.sciencedirect.com/science/article/pii/ S2468601820300328
-
[29]
T. K. Jouini, Z. Sun, V . Renganathan, V . Hagenmeyer, Input and state constrained inverse optimal control with application to power net- works, IFAC-PapersOnLine 56 (2) (2023) 5451–5456, 22nd IFAC World Congress.doi:https://doi.org/10.1016/j.ifacol.2023.10. 196. URLhttps://www.sciencedirect.com/science/article/pii/ S2405896323005475
-
[30]
T. Chen, H. Chen, Universal approximation to nonlinear operators by neu- ral networks with arbitrary activation functions and its application to dy- namical systems, IEEE transactions on neural networks 6 (4) (1995) 911– 917
1995
-
[31]
L. Lu, P. Jin, G. Pang, Z. Zhang, G. E. Karniadakis, Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators, Nature machine intelligence 3 (3) (2021) 218–229
2021
-
[32]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stu- art, A. Anandkumar, Fourier Neural Operator for Parametric Partial Dif- ferential Equations (May 2021).arXiv:2010.08895
Pith/arXiv arXiv 2021
-
[33]
L. Bhan, Y . Shi, M. Krsti ´c, Neural operators for bypassing gain and con- trol computations in PDE backstepping, IEEE Transactions on Automatic Control 69 (8) (2024) 5310–5325.doi:10.1109/TAC.2023.3347499
-
[34]
S. Wang, M. Diagne, M. Krstic, Backstepping neural operators for 2x2 hyperbolic PDEs, Automatica 178 (2025) 112351.doi:https://doi. org/10.1016/j.automatica.2025.112351. URLhttps://www.sciencedirect.com/science/article/pii/ S0005109825002444
-
[35]
Y . Zhang, J. Auriol, H. Yu, Operator learning for robust stabilization of linear markov-jumping hyperbolic PDEs, Automatica 185 (2026) 112809. doi:https://doi.org/10.1016/j.automatica.2025.112809. URLhttps://www.sciencedirect.com/science/article/pii/ S0005109825007083
-
[36]
Lamarque, L
M. Lamarque, L. Bhan, Y . Shi, M. Krsti´c, Adaptive neural-operator back- stepping control of a benchmark hyperbolic PDE, Automatica 177 (2025) 112329
2025
-
[37]
L. Bhan, P. Qin, M. Krsti´c, Y . Shi, Neural operators for predictor feedback control of nonlinear delay systems, in: N. Ozay, L. Balzano, D. Panagou, A. Abate (Eds.), Proceedings of the 7th Annual Learning for Dynamics & Control Conference, V ol. 283 of Proceedings of Machine Learning Re- search, PMLR, 2025, pp. 179–193. URLhttps://proceedings.mlr.press/...
2025
-
[38]
D. Sewell, X. Li, S. Tretiakov, K. Kumar, D. Fridovich-Keil, Neural oper- ators for multi-task control and adaptation,https://arxiv.org/abs/ 2604.03449(2026).arXiv:2604.03449
Pith/arXiv arXiv 2026
-
[39]
Z. Li, K. Savla, Fno ∠θ: Extended fourier neural operator for learning state and optimal control of distributed parameter systems,https://arxiv. org/abs/2604.05187(2026).arXiv:2604.05187
Pith/arXiv arXiv 2026
-
[40]
Zhang, R
Y . Zhang, R. Zhong, H. Yu, Neural operators for boundary stabiliza- tion of stop-and-go traffic, in: A. Abate, M. Cannon, K. Margellos, A. Papachristodoulou (Eds.), Proceedings of the 6th Annual Learning for Dynamics & Control Conference, V ol. 242 of Proceedings of Machine Learning Research, PMLR, 2024, pp. 554–565. URLhttps://proceedings.mlr.press/v242...
2024
-
[41]
S. Toumi, Neural operators in backstepping control for hyperbolic partial differential equations (PDEs) in rotary drilling systems, Systems & Con- trol Letters 204 (2025) 106191.doi:https://doi.org/10.1016/j. sysconle.2025.106191. URLhttps://www.sciencedirect.com/science/article/pii/ S0167691125001732
work page doi:10.1016/j 2025
-
[42]
V . Todorovski, K. H. Kim, A. Astolfi, M. Krstic, Nonholonomic Robot Parking by Feedback – Part I: Modular Strict CLF Designs,https:// arxiv.org/abs/2511.15119(2026).arXiv:2511.15119. 12 /Systems&Control Letters 00 (2026) 1–1313
arXiv 2026
-
[43]
K. H. Kim, V . Todorovski, M. Krsti ´c, Nonholonomic Robot Park- ing by Feedback – Part II: Nonmodular, Inverse Optimal, Adaptive, Prescribed/Fixed-Time and Safe Designs,https://arxiv.org/abs/ 2511.15219(2025).arXiv:2511.15219. 13
arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.